


肠道疾病是极为常见的健康问题之一,其涉及消化系统的诸多器官,涵盖胃、小肠、大肠以及相关的消化腺[1]。世界卫生组织的统计数据显示,近年来肠道疾病的发病率呈上升态势[2]。内窥镜作为一种传统的医疗检测设备,在肠道疾病的检测与治疗中发挥着关键作用[3]。然而,传统的内窥镜检测技术存在着一些显著缺点与局限性[4]。内窥镜是一种细长且灵活的仪器,其通过插入人体的自然腔道,使医生能够直接观察到器官的表面状况,并实施活检、切除病变组织等操作[5]。肠道内窥镜通常由刚性材料制成,在实际应用中操作稍有不慎,便可能损伤肠道内壁的黏膜组织,严重时甚至会引发肠道穿孔或出血等危险情况,给患者带来极大的不适和安全隐患[6]。
针对肠道内窥镜存在的弊端,近年来蓬勃兴起的软体机器人为肠道疾病的检测与诊断提供了较为理想的手段。软体机器人通常由聚合物、硅橡胶或其他柔性材料制成,其杨氏模量处于自然界软生物材料的模量范围之内,因而在与人体结构交互时具备更高的安全性[7]。基于此,软体机器人已广泛应用于人机交互、可穿戴设备等领域,在医疗领域更是备受关注。近年来,诸多科研人员围绕软体机器人在肠道疾病检查与治疗方面展开了大量研究[8]。例如:Li等[9]设计了一种配备柔性抓手的气动软体机器人,该机器人可以在管道中爬行并定点抓取物体;李恭新等[10]设计了一种仿水蛭蠕动软体机器人,该机器人可以在水平面、斜坡和类肠道环境中运动,为肠道疾病的检查与治疗提供了一种新颖且对患者友好的新方法;Heung等[11]设计了一种适用于肠道疾病检查的类蚯蚓软体机器人,该机器人能够在类结肠等管状环境中爬行,且可在陡峭斜坡上攀爬而不减速;Manfredi等[12]研发了一种用于结肠检查的气动类尺蠖双球囊微型软体机器人,对其在形状和尺寸与人体结肠相近的可变形塑料结肠模型中进行了测试,实验结果验证了其具备有效的运动能力;Kim等[13]设计了一种采用形状记忆合金致动器的类蚯蚓微型软体机器人,采用了模拟刚毛的微针结构夹紧装置,通过无线装置对温度进行控制,进而操控机器人内部形状记忆合金的收缩与拉伸,以此控制机器人运动,并通过实验对其运动可行性展开分析,为软体机器人朝着无线化、小型化方向发展提供了可能。当前,软体机器人逐渐朝着无线化、小型化的方向迈进,但机器人设计往往存在局限性:要么需要依赖大量外接线缆,要么其驱动方式可能对人体肠道环境造成潜在的危害。因此,开发一款不需外接线缆且采用安全驱动方式的气体驱动式无绳软体机器人具有重要意义。
作者受蚯蚓结构与运动机理的启发[14],设计了一种用于肠道疾病检测的新型气体驱动式仿蚯蚓无绳软体机器人。蚯蚓的主要运动方式为蠕动,肠道细长的管状结构与蚯蚓在土壤中的运动环境有高度相似性,并且蠕动的运动模式特别适合在受限的空间内实现高效推进。从生物力学角度分析,蚯蚓的运动机理依赖于其独特的肌肉系统:体节内包含纵向肌和环状肌两组肌肉群,通过肌肉群协调收缩产生推进力。具体而言,当纵向肌收缩、环状肌舒张时,体节收缩,腔内压升高,促使体表刚毛外伸锚定;反之,当纵向肌舒张、环状肌收缩时,体节伸长,腔内压降低,刚毛收回。仿蚯蚓无绳软体机器人模仿蚯蚓的运动特性,其前端和后端径向运动执行器作为蚯蚓的纵向肌,中端轴向运动执行器作为蚯蚓的环状肌,通过三者的配合即可驱动,实现软体机器人蠕动爬行。该机器人依据蚯蚓的运动机理设计[15],能够在刚性和柔性管道等类肠道环境中实现无线驱动。此外,在原有运动功能的基础上,该机器人配备了柔性压力传感器和无线微型摄像头,用于实时监测环境压力的变化及异物存在的情况。本文详细阐述了仿蚯蚓无绳软体机器人的结构及制作方法,仿真分析了其运动可行性,并借助实验对其运动性能展开分析与验证;同时,完成了机器人对管道内环境压力及图像的采集,并对图像进行处理,为软体机器人应用于人体肠道疾病检测提供了理论与实践依据。
1 无绳软体机器人的结构及制作
1.1 无绳软体机器人结构
所研制的无绳软体机器人如图1所示。其结构与蚯蚓相似[16],主要由3个运动执行器构成,分别为前端和后端径向运动执行器、中心轴向运动执行器。中心轴向运动执行器的内部嵌入了用于无线信号接收的微型电路板,外部设有丁腈胶O形圈,用以限制其径向膨胀。在运动过程中,由于存在这一束缚,中心轴向运动执行器主要在轴向发生伸长与收缩,径向的膨胀可忽略不计。对于前端和后端径向运动执行器,充气时主要以径向膨胀为主,轴向膨胀较小,可忽略不计。在机器人开始运动前,向中心轴向运动执行器充入一定量的气体,以便后续进行气体内循环。气体内循环主要通过控制内置的微型气泵来实现,即按照一定规律将气体交替分配至每个运动执行器内部,从而驱动机器人运动。
图1
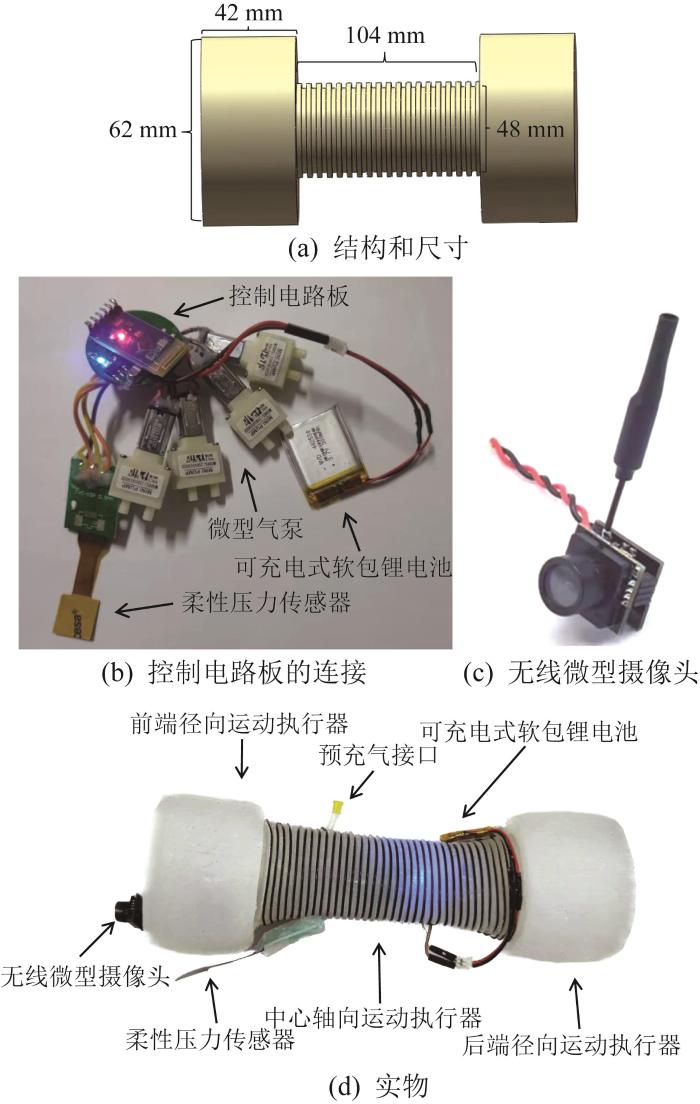
如图1(a)所示,前端和后端径向运动执行器的直径为62 mm,长度为42 mm;中心轴向运动执行器的直径为48 mm,长度为104 mm;3个运动执行器的壁厚均为1.75 mm。各运动执行器均选用超弹性形变材料Ecoflex-0030来制作。
中心轴向运动执行器的内部放置了预先集成好的控制电路板。该控制电路板为直径为34 mm的圆形,表面呈凹凸状,最厚处达15 mm。此电路板连接着4个微型气泵、电源及柔性压力传感器,如图1(b)所示。微型气泵选用集创兴科技有限公司生产的M20双孔微型气泵JSB1015系列,其最长处有32 mm,最宽处有18 mm。外接电源采用可充电式软包锂电池402530,电池长为30 mm,宽为25 mm,厚为4 mm。柔性压力传感器的感应单元为边长为36 mm的正方形,厚度为0.3 mm。在机器人前端径向运动执行器的前部装有单独集成的无线微型摄像头,如图1(c)所示,其最长处有17.2 mm。将控制电路板合理安置于中心轴向运动执行器内部,在不影响机器人运动的前提下,可通过蓝牙对该微型电路板进行有效控制。制作完成后的机器人实物如图1(d)所示。
微型气泵是实现软体机器人驱动的重要元件。所采用的M20双孔微型气泵的尺寸显著小于市面上的常见产品,完全符合软体机器人的设计要求。此外,该气泵的驱动电压为3 V,与内置无线电路板的驱动电压一致,不需外接电池即可直接驱动,进一步简化了系统设计。而其他类型的气泵驱动电压通常超过5 V,需要额外配置电池,这不仅会增大系统的复杂性,也与软体机器人小型化的设计目标相冲突。因此,选用该微型气泵在尺寸和电压匹配性上均具有显著优势。
1.2 无绳软体机器人制作流程
无绳软体机器人的机身结构由Ecoflex-30液体硅橡胶材料制成。该材料的抗拉强度为200 Pa,杨氏模量与人体肌肉的杨氏模量相近[17],并且材料的特性优于胃肠镜软管,不会对肠道黏膜造成接触性损伤。机器人的制作步骤如下。
图2
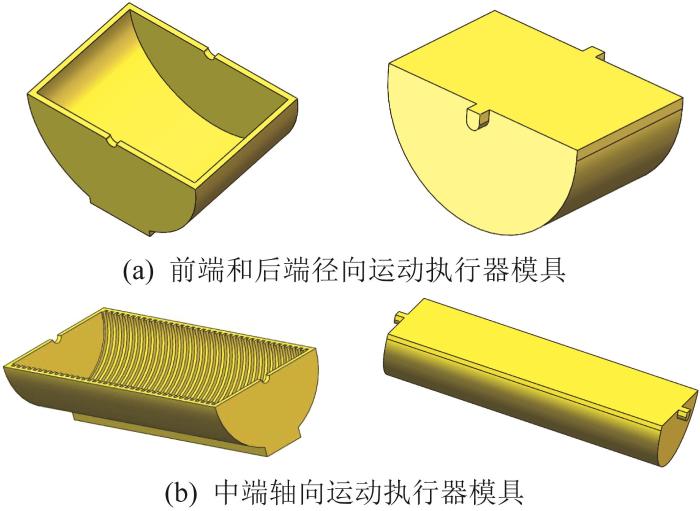
2)将绘制好的模具图导入Modellight软件生成图层文件,将图层文件导入3D打印机。3D打印机由北京汇天威科技有限公司生产,型号为HORI Z30。采用丙烯腈-丁二烯-苯乙烯材料,设置好条件后进行打印。模具打印条件设置:模型层高为0.1 mm,模型内部填充率为25%,打印头的工作温度为210 ℃,打印平台的工作温度为40 ℃,模型底层打印速度为20 mm/s,填充打印速度为100 mm/s,外壳打印速度为60 mm/s,底垫为防翘边底垫。
3)将Ecoflex-30材料的A部分(硅胶基质)和B部分(固化剂)以1∶1的体积比在塑料烧杯中混合,并充分搅拌5 min。然后,将塑料烧杯中的液态硅橡胶材料置于真空泵中,抽气10 min左右,待硅橡胶表面的气泡全部去除后,取出材料并缓慢倒入打印模具内。模具表面需事先涂抹一层凡士林脱模剂,以便后续脱模处理。
4)将模具内的液态硅橡胶材料在25 ℃室温、40%的相对湿度下静置6 h以上使之成为固态,随后将固态硅橡胶从模具中脱模取出,便制成了软体机器人的运动执行器。
5)将控制电路板合理放置于中心轴向运动执行器内,同时将内径为2 mm的硅胶软管的一端与前端和后端径向运动执行器相连,另一端与控制电路板所连的微型气泵相连,每个运动执行器连接2根硅胶软管。完成内部连接后,将各运动执行器用硅树脂黏合剂进行相互粘接,软体机器人即制作完成。
2 无绳软体机器人的控制
2.1 无绳软体机器人的运动步态
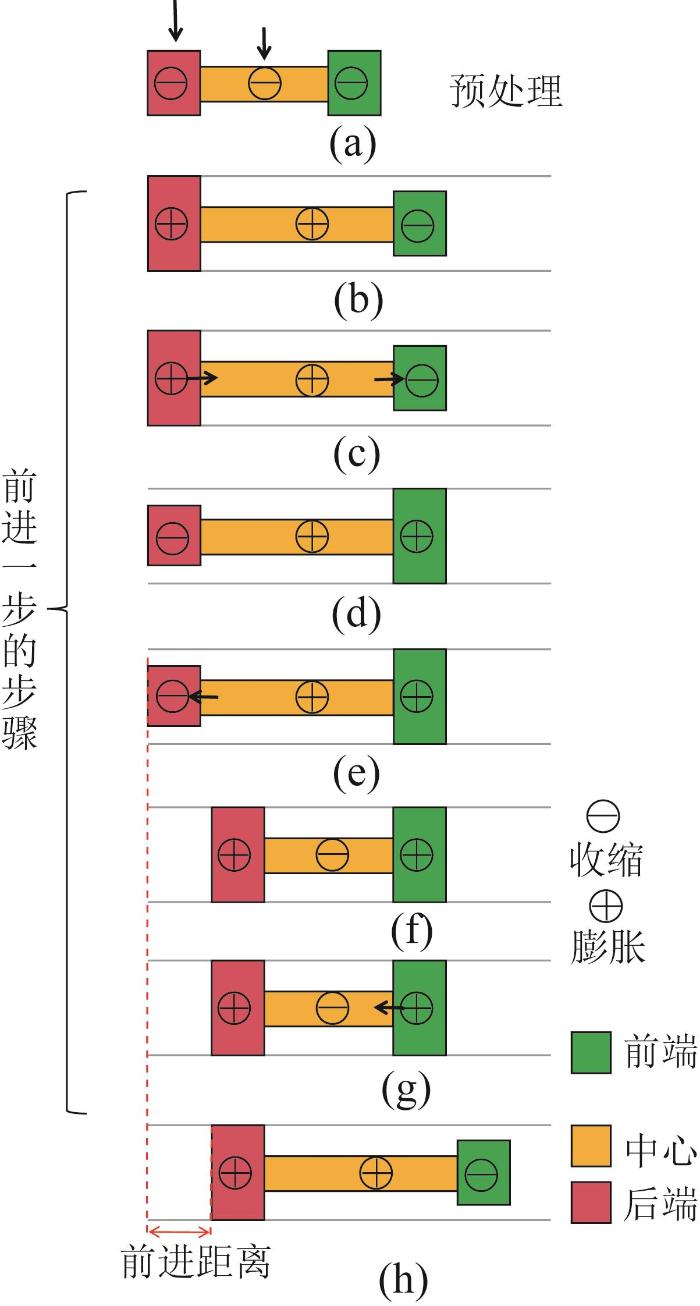
无绳软体机器人完整的运动步态如图3所示。首先,如图3(a)所示,向后端和中部气腔充入适量的气体,用于机器人后续运动时自身气体的内循环。当机器人达到图3(b)所示状态时,通过控制微型气泵的通断,将后端径向运动执行器内的气体输送至中心轴向运动执行器,同时将中心轴向运动执行器内的气体输送至前端径向运动执行器,如图3(c)所示。此时,后端径向运动执行器锚定在管道内壁。当机器人呈现图3(d)所示状态时,再次通过控制微型气泵的通断,将中心轴向运动执行器内的气体输送至后端径向运动执行器,如图3(e)所示。在此过程中,中心轴向运动执行器由膨胀状态转变为放松状态。由于前端径向运动执行器处于锚定状态,后端径向运动执行器会向前拖动一段距离。当机器人处于图3(f)所示状态时,通过控制微型气泵的通断,将前端径向运动执行器内的气体输送至中心轴向运动执行器,如图3(g)所示。此时,中心轴向运动执行器由放松状态转变为膨胀状态。由于后端径向运动执行器处于锚定状态,前端径向运动执行器会向前拖动一段距离,达到图3(h)所示状态,即为图3(b)所示状态。重复图3(b)到(g)的步骤,即可实现机器人向前运动。若使机器人向后运动,只需逆向操作上述步骤即可。
图3
2.2 无绳软体机器人的控制系统
所设计的无绳软体机器人主要由控制系统、驱动系统和检测系统构成,如图4所示。其中:控制系统涵盖手机App信号发送端、蓝牙通信模块信号接收端及STM32单片机等;驱动系统由达林顿晶体管和4个微型气泵组成;检测系统由柔性压力传感器和无线微型摄像头组成。
图4
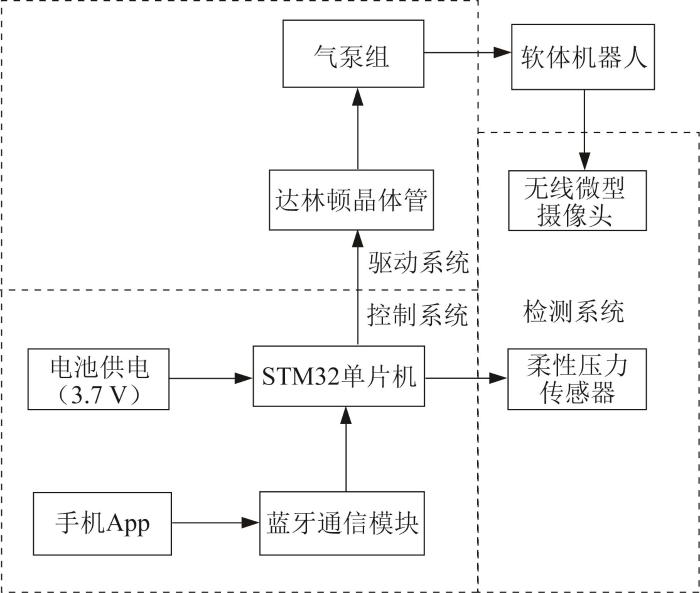
控制系统的控制流程如下:首先接通控制电路板的电源,随后在手机端连接控制电路板对应的蓝牙;在手机端App中设4个按键,分别用于控制4个气泵的开启与关闭;当按下其中一个按键时,信号会被传输到控制电路板的蓝牙模块,蓝牙模块继而将该信号传输给STM32单片机;依据预先导入的程序,STM32单片机控制达林顿晶体管的导通与截止,从而实现对微型气泵开与闭的控制。与此同时,手机端App还能够接收由柔性压力传感器检测到的压力数据。无线微型摄像头独立集成于机器人的前端,上电后,通过手机端连接独立App对应的蓝牙,便可直接查看实时图像。
在软体机器人设计中,各关键部件的选型很重要。其中:单片机选用STM32F101C8T6,其性能能够满足机器人控制逻辑的运算需求;蓝牙通信模块采用JDY-,此模块具有Bluetooth.0 SPP+BLE4.2版本,可实现稳定的无线数据传输,确保手机端与控制电路板之间的有效通信;达林顿晶体管采用ULN200,其能够对单片机输出的控制信号进行放大,从而驱动微型气泵工作;微型气泵采用M20双孔微型气泵JSB1015系列,该系列气泵在尺寸、功耗以及气体输送能力等方面与整体设计适配;柔性压力传感器的型号为RP-C5ST-0.1G,其可精准感知环境压力的变化,并将压力数据反馈至手机端;无线微型摄像头采用ZENCHANSI品牌,型号为EWRF 701U,其具有良好的成像质量与无线传输性能,能够满足对环境图像实时采集与传输的要求。
3 无绳软体机器人运动仿真及其结果验证
采用3D建模软件SolidWorks和有限元仿真软件Abaqus,对无绳软体机器人的运动进行仿真分析。其中,弹性材料Ecoflex-0030采用Yeoh模型进行定义[18],设定其参数C10=0.11,C20=0.02[19]。机器人运动仿真结果与实验结果的对比如图5所示。由图5(a)和图5(b)可知,充气完成后前端和后端径向运动执行器轴向的膨胀不显著,径向的膨胀较为明显,中端轴向运动执行器径向的膨胀无明显变化,轴向的膨胀较为突出,这一结果与预期相符。由图5(c)和图5(d)可知,前端和后端径向运动执行器的径向膨胀幅度与内部压强的变化基本呈线性关系,仿真结果与实验结果的差异较小,两者基本一致。由图5(e)和图5(f)可知,中端轴向运动执行器的轴向膨胀幅度与内部压强的变化也基本呈线性关系,仿真结果与实验结果基本一致。
图5

图5
无绳软体机器人运动仿真结果与实测结果的对比
Fig.5
Comparison of simulation results and measured results of Cordless soft robot's movement
4 无绳软体机器人运动实验
4.1 在刚性管道内的运动实验
首先,向中端轴向运动执行器充入适量气体,使其呈完全膨胀状态;其次,接通软体机器人的电源,并进行蓝牙连接;接着,将机器人放置于内径为65 mm的透明刚性管道内;最后,依据预设的运动步态,通过手机端对气泵的开闭进行精确控制,以此驱动机器人在管道内运动。机器人在刚性管道内的运动实验如图6所示。经过多次重复性测试,最终测得机器人在该透明刚性管道内的运动速率为0.75 mm/min。
图6
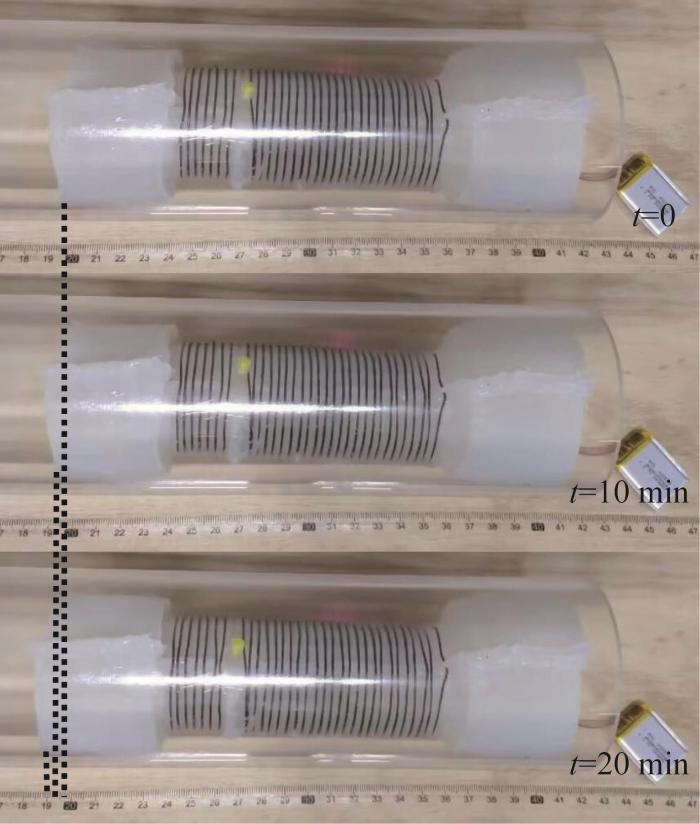
图6
无绳软体机器人在刚性管道内的运动实验
Fig.6
Experiment of cordless soft robot's movement in rigid tube
4.2 在柔性管道内的运动实验
鉴于人体肠道本质上属于柔性管道,在柔性管道环境下对软体机器人的性能展开测试具有重要意义。为了准确模拟下消化道的真实环境,在半透明柔性管道内壁均匀涂布液体凝胶Laponite RD。Laponite是一种层状纳米级硅酸盐合成材料,具有优异的生物相容性和可降解性,常作为流变改性剂使用。其独特的物理特性体现在:虽然不溶于水,但能够水合膨胀形成无色透明胶体;当硅酸盐的质量分数达到2%及以上时,可形成具有高触变性的凝胶体系。这种材料能够有效模拟结肠黏液的润滑特性,其剪切弱化和触变行为与真实的肠道环境高度相似。此外,通过调节硅酸盐的质量分数可以便捷地控制凝胶的流变特性,为不同的实验需求提供可变的参数调节空间。通过这种高仿真的环境模拟方法,可为软体机器人在真实肠道环境中性能的验证提供可靠的实验平台。
选用内径为65 mm的半透明柔性管道来模拟人体结肠的复杂环境。柔性管道内部本身就有一定的褶皱,在管道内壁涂一层液体凝胶后,在一定程度上达到了模拟结肠褶皱和肠道内黏液的目的。软体机器人在柔性管道内的运动实验如图7所示。经过多次重复性测试,最终测得机器人在该半透明柔性管道内的运动速率同样为0.75 mm/min。
图7
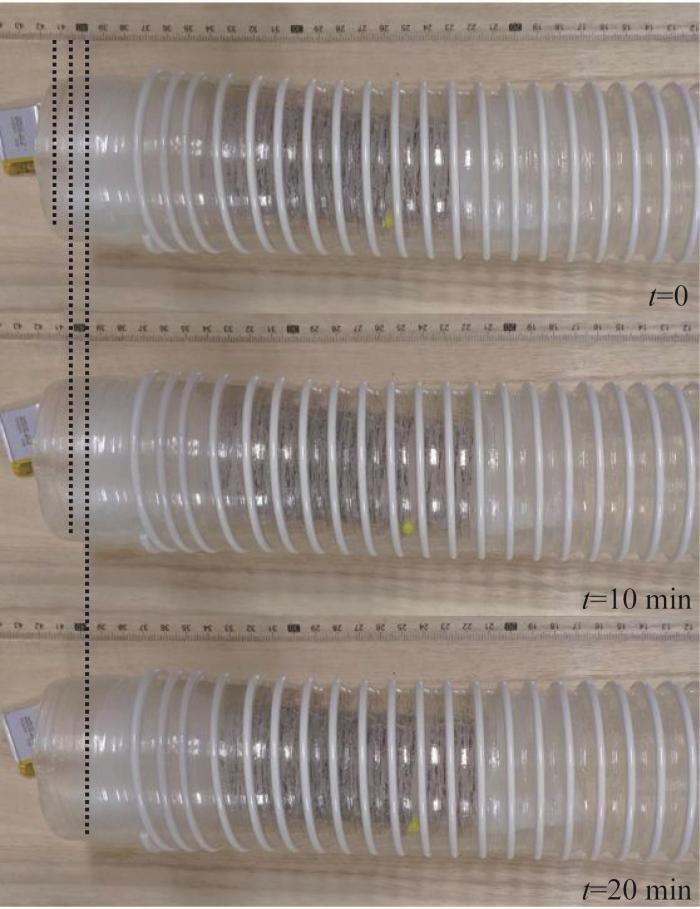
图7
无绳软体机器人在柔性管道内的运动实验
Fig.7
Experiment of cordless soft robot's movement in flexible tube
4.3 在柔性弯曲管道内的运动实验
鉴于人体肠道存在一定的弯曲,在柔性弯曲管道环境下对软体机器人的性能展开测试具有重要意义。对4.2节中涂有黏性液体的柔性管道进行一定程度的弯曲,重复进行机器人在柔性管道内的运动实验,如图8所示。测得机器人在该半透明柔性弯曲管道内的运动速率同样为0.75 mm/min。
图8
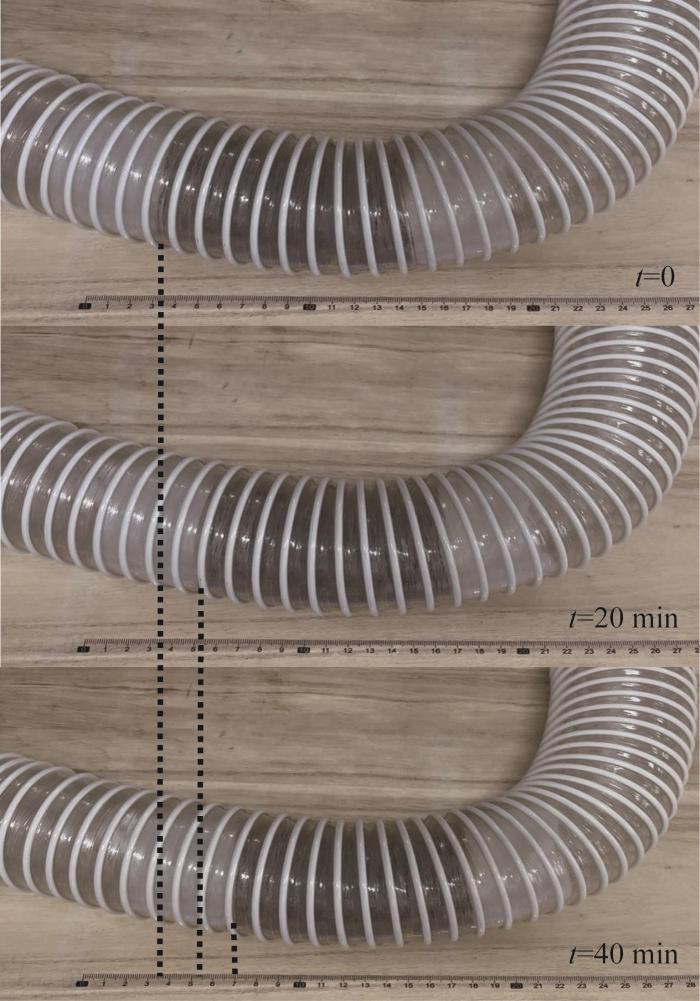
图8
无绳软体机器人在柔性弯曲管道内的运动实验
Fig.8
Experiment of cordless soft robot's movement in flexible curved tube
4.4 柔性管道内压力检测实验
在正常生理状态下,人体肠道内的压力通常不超过2 kPa[20]。具体而言,空腹时小肠内压力约为0.2~0.5 kPa,大肠内压力约为0.4~1 kPa。进食后,小肠内压力上升至1~2 kPa。需要注意的是,人体肠道内压力会因年龄、体质等因素而有所波动,但总体上大多不会超过2 kPa。肠道疾病的发生往往会导致肠道内压力出现显著变化。以肠梗阻为例,发病时肠道内压力会成倍增加,其中动力性肠梗阻可使肠道内压力上升至5 kPa左右,机械性肠梗阻会使压力攀升至10 kPa左右。急性结肠炎会使病变肠道处的压力升高至2~3 kPa。由此可见,当肠道内压力大于2 kPa时,提示肠道可能发生了一定程度的病变[20]。此外,在机器人运行过程中,当前端和后端径向运动执行器充气并锚定在管道内壁时,会对管道内壁施加一定的压力。若该压力值大于2 kPa,可能会给人体带来不适[21]。因此,为软体机器人配备合适的柔性压力传感器具有重要意义。它不仅能够实时监测肠道内压力的变化,以此判断肠道是否发生病变,还能在机器人运动过程中判断前端和后端径向运动执行器充气时对人体造成的影响,避免引起人体不适。
单独对前端径向运动执行器充气,则管道内壁所受压强的变化曲线如图9所示。图中,D点标志着前端径向运动执行器在管道内已处于锚定状态;纵坐标上的2 kPa为人体可承受的管道内壁压强临界值。由图可知,在单独对前端径向运动执行器充气进程中,当执行器在管道内处于锚定状态后,若继续充气,大约经过30 s,管道内壁压强会达到使人感到不适的数值。因此,将该机器人应用于人体肠道疾病检测时,只要把前端径向运动执行器在管道内处于锚定状态后的充气时间控制在30 s以内,便能够有效避免人体的不适感。
图9
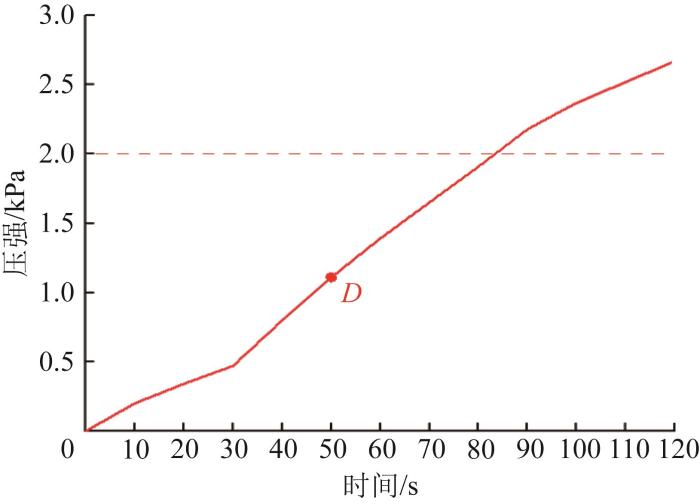
图9
前端径向运动执行器充气时管道内壁所受压强变化曲线
Fig.9
Variation curve of pressure on inner wall of tube with front-end radial motion actuator being inflated
4.5 柔性管道内图像检测与处理实验
Fast RCNN(faster region convolutional neural net,基于区域卷积网络的快速检测)作为一种应用于目标检测领域的算法[22],在人体肠道的肿瘤检测中展现出显著成效[23]。该算法的实施流程大致可分为下3个步骤。第1步,对输入的图像进行处理,将其划分为1 000~2 000个候选区域。此步骤旨在从图像中初步筛选出可能包含目标的区域,为后续精确检测提供基础。第2步,将图像输入网络,经网络运算后获取对应的特征图。与此同时,将由SS(selective search,选择性搜索)算法生成的候选框投影至该特征图上,从而得到与之对应的特征矩阵。这一步实现了图像信息在网络中的特征提取与转换,为目标的精准定位和分类奠定了基础。第3步,针对每个特征矩阵,借助ROI pooling(region of interest pooling,感兴趣区域池化)层将其缩放为7×7大小的特征图,随后,将该特征图展开,并通过一系列全连接层进行处理,最终得到预测结果。通过这些步骤,Fast RCNN算法能够有效识别图像中的目标物体,在人体肠道的肿瘤检测中发挥重要作用[24]。
在本实验中,为了模拟人体肠道内的肿瘤,在管道内放置了黑色海绵。软体机器人利用其配备的无线微型摄像头采集到一段视频;在手机端对该视频进行查看,并将其保存下来;随后,从视频中截取50帧图像,运用Fast RCNN算法对这些图像进行展开处理。Fast RCNN算法的网络结构及处理结果如图10所示。经过处理后,实验人员能够清晰识别出预先放置在管道内用于模拟人体肠道肿瘤的黑色海绵。
图10
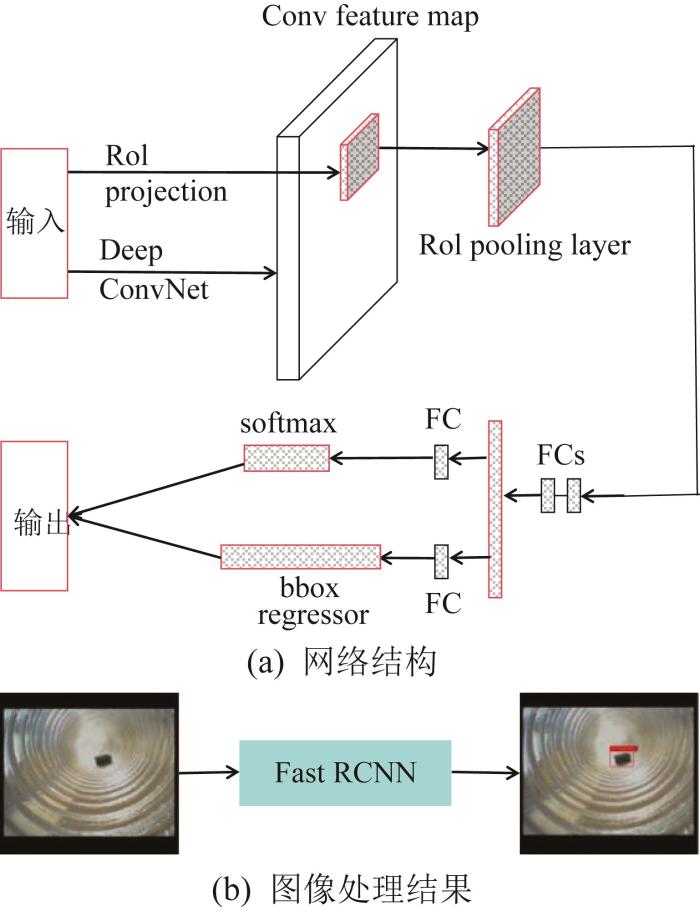
图10
Fast RCNN算法的网络结构及处理结果
Fig.10
Network structure and processing result of Fast RCNN algorithm
5 结 论
针对传统内窥镜和有线缆软体机器人在进行人体肠道疾病检测时易给人体带来不适这一缺点,作者设计了一种气体驱动式仿蚯蚓无绳软体机器人。分别在刚性管道和柔性管道内进行了机器人运动实验。实验结果表明,该软体机器人不仅能够在柔性管道内精准检测到环境压力的变化,还能在柔性管道内采集管道内部的图像,并借助Fast RCNN算法完成对模拟肿瘤的目标检测,证明了其在肠道疾病检测领域应用的可行性。该机器人在管道内的运动速度为0.75 mm/min。
所提出的无绳软体机器人具备良好的人机交互特性,可实现定点压力和图像采集的功能。展望未来,作者将进一步优化机器人的结构,选用更高效率的微型气泵,提升其运动速度和检测精度,以推动其在肠道疾病检测领域更高效的应用。
参考文献
Burden of gastrointestinal disease in the United States: 2012 update
[J].
Cancer incidence and mortality in China, 2016
[J].
Advanced technologies for gastrointestinal endoscopy
[J].
The measurement of forces exerted during colonoscopy
[J].
Approach to incomplete colonoscopy: new techniques and technologies
[J].
Perforation during colonoscopy in endoscopic ambulatory surgical centers
[J].
Twisted and coiled polymer (TCP) muscles embedded in silicone elastomer for use in soft robot
[J].
A review article: investigations on soft materials for soft robot manipulations
[J].
Development of an earthworm-based intestinal soft robot equipped with a gripper
[J].
仿水蛭蠕动爬行软体机器人设计
[J].
Design of a leech-like peristaltic crawling soft robot
[J].
Design and prototyping of a soft earthworm-like robot targeted for GI tract inspection
[M]//
A soft pneumatic inchworm double balloon (SPID) for colonoscopy
[J].
An earthworm-like micro robot using shape memory alloy actuator
[J].
Design, fabrication and control of a multi-material-multi-actuator soft robot inspired by burrowing worms
[M]//
Development of a new multi-cavity pneumatic-driven earthworm-like soft robot
[J].
An earthworm-inspired friction-controlled soft robot capable of bidirectional locomotion
[J].
Design, fabrication and control of soft robots
[J].
Analytical modeling and design of generalized pneu-net soft actuators with three-dimensional deformations
[J].
A three-chambed soft actuator module with omnidirectional bending motion
[M]//
Supraphysiologic extracellular pressure inhibits intestinal epithelial wound healing independently of luminal nutrient flow
[J].
Effects of increased ambient pressure on colon cancer cell adhesion
[J].
Faster R-CNN: towards real-time object detection with region proposal networks
[EB/OL].(
Brain tumor classification and segmentation using faster R-CNN
[C]//2019 Advances in Science and Engineering Technology International Conferences. Dubai, United Arab Emirates, Mar.
Faster R-CNN: an approach to real-time object detection
[C]//DOI:10.3785/j.issn.1006-754X.2025.05.112 URL [本文引用: 1]
DOI:10.3785/j.issn.1006-754X.2025.05.112 URL [本文引用: 1]
用于肠道疾病检测的仿蚯蚓无绳软体机器人
[J].
Earthworm-like cordless soft robot for intestinal disease detection
[J].DOI:10.3785/j.issn.1006-754X.2025.05.112 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}