搜救机器人作为具备越障能力的智能化移动设备,能够代替人力更高效地完成灾后搜救工作,具有广阔的应用前景[1 ] 。在复杂地形环境下的搜救工作中,一款具备地形自适应能力的越障机构对提升搜救机器人的移动性能和搜救效率有十分重要的意义。
目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果。吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力。中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力。华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力。北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性。此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升。
现阶段,国内的一些高校、研究所和实验室[12 -15 ] 虽已针对上述地形自适应机构的优缺点做了总结和分析,并进行了一定的改进和完善,但这些机构主要应用于月球表面探测,而针对适用于地面搜救环境的被动地形自适应机构的研究相对较少,且现有机构仍有可改进和优化之处。
为提高灾后搜救效率、降低搜救人员的工作强度以及减少不必要的人员伤亡和财产损失,针对灾后典型的瓦砾、残垣路面,设计了一款被动地形自适应机构,用于辅助轮式搜救机器人在复杂地形环境中更高效地执行搜救任务。通过对地形环境的分析和归纳,确定了轮式搜救机器人的主要越障目标为400 mm高的垂直台阶。首先,基于传统越障机构的特点,对地形自适应机构进行选型;同时,通过分析机构的攀爬、越障原理和几何特性,确定各杆件的几何约束条件,并采用遗传算法对机构进行优化设计。然后,对轮式搜救机器人的整个越障过程进行分析,构建其主要越障阶段的动力学模型并开展力学分析。最后,建立轮式搜救机器人的多刚体动力学模型,利用ADAMS软件对其越障性能进行仿真和验证。
1 轮式搜救机器人地形自适应机构设计
1.1 地形自适应机构选型
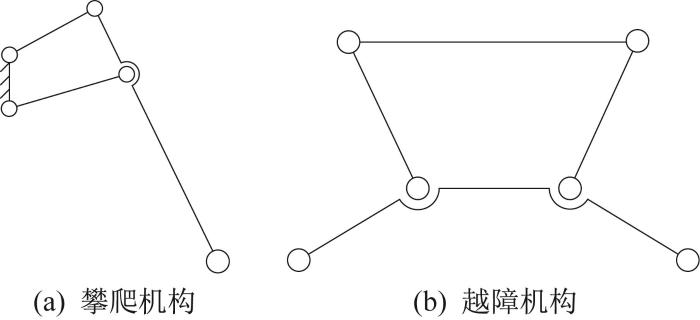
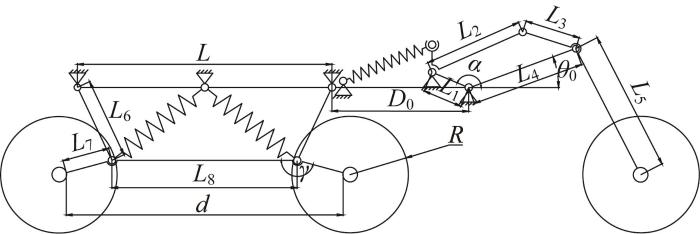
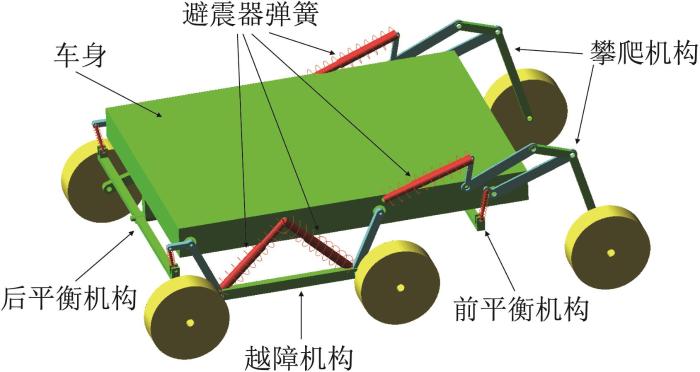
在面对各种复杂的地形环境时,搜救机器人不仅要具备良好的运动平顺性,还要拥有优异的地形自适应能力。基于前人的设计经验以及轮式搜救机器人对地形自适应的实际需求,设计了一款被动地形自适应机构,其主要由图1 (a)所示的双摇杆四边形攀爬机构和图1 (b)所示的双摇臂越障机构组成。
图1
图1
被动地形自适应机构单元
Fig.1
Units of passive terrain adaptive mechanism
1.2 地形自适应机构几何模型构建
1.2.1 攀爬机构几何模型
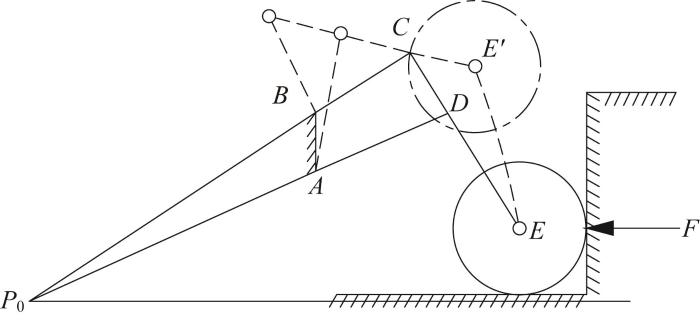
双摇杆四边形攀爬机构的几何结构如图2 所示。由三心定理可知,在四边形连杆机构ABCD 中,连杆AD 和连杆BC 的延长线的交点P 0 为摆杆CDE 的速度瞬心;摆杆CDE 的末端与机器人前轮的中心相连。当机器人前轮与障碍物接触时,摆杆CDE 末端E 点在水平方向上外力F 的作用下带动摆杆CDE 翻转,将机器人前轮绕速度瞬心P 0 向上抬升至E '
图2
图2
攀爬机构几何结构
Fig.2
Geometric structure of climbing mechanism
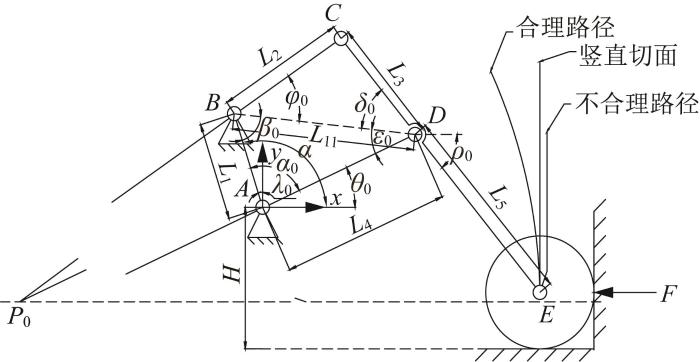
攀爬机构能够向上抬升的条件为:在四边形连杆机构ABCD 通过变形将前轮中心E 点向上抬升的过程中,E 点的运动轨迹不能越过竖直切面,同时应保证摆杆CDE 的速度瞬心P 0 始终位于前轮中心E 点的下方[16 ] 。综上所述,以连杆AB 为基础、A 点为原点建立直角坐标系(x 轴与地面平行,下文同),构建如图3 所示的攀爬机构几何模型。设AB =L 1 BC =L 2 CD =L 3 AD =L 4 DE =L 5 BD =L 11 ∠ BAD =α 0 ∠ ABD =β 0 ∠ CBD =φ 0 ∠ CDB =δ 0 ∠ BDA =ε 0 AB 与y 轴的夹角为λ 0 DA 与x 轴的夹角为θ 0 ,BA 与x 轴的夹角为α ,DE 与x 轴的夹角为ρ 0 H =420 mm。
图3
图3
攀爬机构几何模型
Fig.3
Geometric model of climbing mechanism
根据图3 所示的攀爬机构几何模型,可得E 点的横、纵坐标x E y E
x E = L 4 c o s θ 0 + L 5 c o s ρ 0 y E = L 4 s i n θ 0 - L 5 s i n ρ 0 (1)
设机器人前轮即将接触障碍物时,即攀爬机构即将受力变形时E 点的初始纵坐标为y E 0 ∆ H 0
∆ H 0 = y E - y E 0 (2)
鉴于攀爬机构的抬升高度∆ H 0 θ 0 L 2 L 3 表1 所示。
结合实际布置需求,建立攀爬机构抬升高度的优化模型:
m i n f X 0 = m i n 1 ∆ H 0 X 0 = θ 0 L 2 L 3 T s . t . L 1 s i n λ 0 + c o s λ 0 t a n α 0 + β 0 + φ 0 + θ 0 t a n θ 0 - t a n α 0 + β 0 + φ 0 + θ 0 t a n θ 0 < L 4 s i n θ 0 - L 5 s i n ρ 0 x E ' < 0 L 2 + L 3 > L 11 (3)
式中:f X 0 ∆ H 0 X 0 x E ' xE 的导函数。
1.2.2 越障机构几何模型
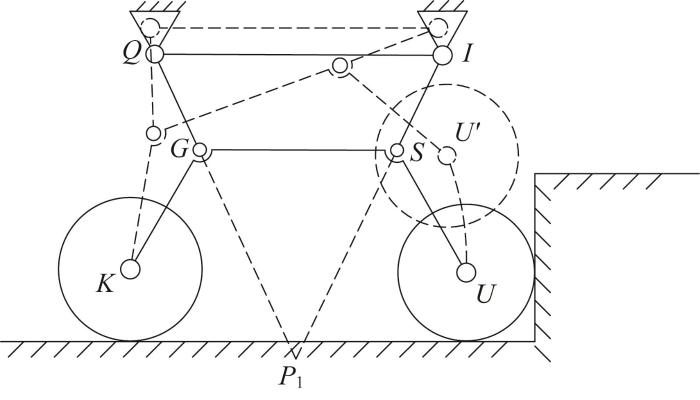
双摇臂越障机构的几何结构如图4 所示。在越障过程中,越障机构因受到外力作用,其连杆位置发生改变,使得机器人中、后轮抬升,从而实现越障。连杆QG 和连杆IS 为连架杆,其延长线的交点为P 1 。由三心定理可知,交点P 1 为摆杆KGSU 的速度瞬心。当机器人的中轮受力时,摆杆KGSU 沿速度瞬心逆时针旋转,从而实现中轮的向上抬升。
图4
图4
越障机构几何结构
Fig.4
Geometric structure of obstacle-surmounting mechanism
通过分析可知,当摆杆KGSU 中GS 段与连杆SI 处于同一直线时,越障机构的抬升高度达到极限。基于此,以越障机构处于极限位置时的抬升高度为优化目标,寻找最优解。
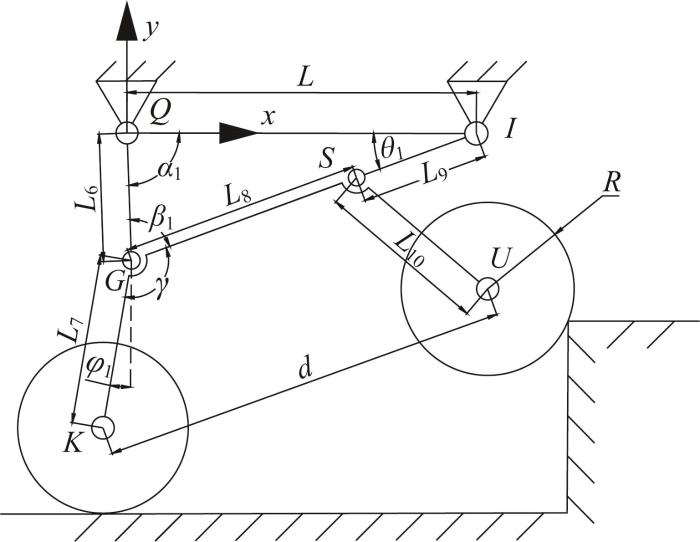
如图5 所示,以机架QI 为x 轴、Q 点为原点建立直角坐标系。根据越障机构的整体布局,令QI =L =750 mm,机器人中、后轮的轮距d =800 mm,机器人轮子半径R =150 mm。设越障机构位于极限位置时,∠ GQI =α 1 ∠ QGI =β 1 ∠ QIG =θ 1 QG 与连杆GK 的夹角为φ 1 ∠ KGS =∠ GSU =γ ;QG =L 6 GK =L 7 GS =L 8 SI =L 9 SU =L 10 L 6 = L 9 L 7 L 10
图5
图5
越障机构几何模型
Fig.5
Geometric model of obstacle-surmounting mechanism
根据图5 所示的越障机构几何模型,可得U 点的横、纵坐标x U y U
x U = L 6 c o s α 1 + L 8 c o s γ - φ 1 - 90 ° + L 10 s i n 2 γ - φ 1 - 180 ° y U = - L 6 s i n α 1 + L 8 s i n γ - φ 1 - 90 ° - L 7 c o s 2 γ - φ 1 - 180 ° (4)
设机器人中轮即将接触障碍物时,即越障机构受力变形时U 点的初始纵坐标为y U 0 ∆ H 1
∆ H 1 = y U - y U 0 (5)
越障机构的抬升高度∆ H 1 θ 1 L 6 L 7 表2 所示。
结合实际布置需求,得到越障机构抬升高度的优化模型:
m i n f X 1 = m i n 1 ∆ H 1 X 1 = θ 1 L 6 L 7 T s . t . L 8 s i n γ - φ 1 - 90 ° - L 7 c o s 2 γ - φ 1 - 180 ° - L 6 s i n α 1 > - L t a n θ 1 t a n α 1 t a n α 1 + t a n θ 1 x U ' < 0 L 6 + L 7 + R > H (6)
式中:f X 1 ∆ H 1 X 1 x U ' xU 的导函数。
1.3 地形自适应机构优化
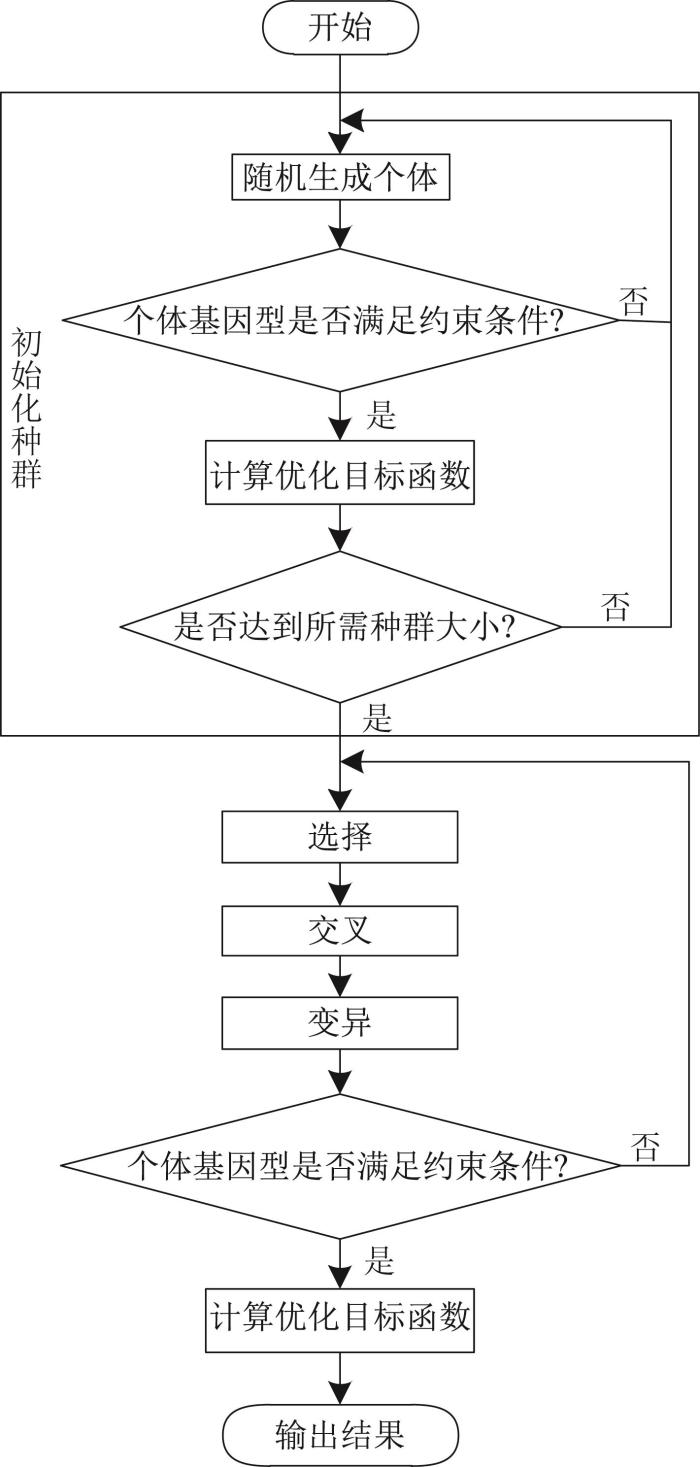
基于上文构建的优化模型,采用遗传算法[17 -20 ] 对满足几何约束条件的被动地形自适应机构各杆件的尺寸参数进行优化求解。遗传算法的求解流程如图6 所示。
图6
图6
遗传算法求解流程
Fig.6
Genetic algorithm solving process
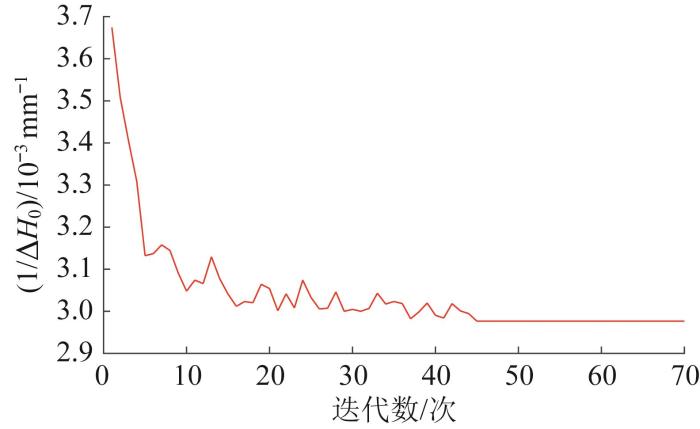
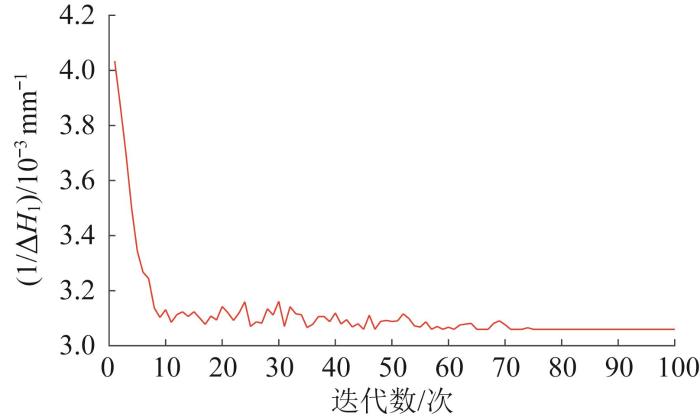
在遗传算法随机生成的种群中,各设计变量作为种群内遗传的基因,会在各自设定的范围内随机取值,进而得到攀爬机构或越障机构中各杆件的不同尺寸方案。不同的杆件尺寸方案随机组合构成不同的基因型,但一部分基因型可能不满足优化模型中的几何约束条件。为减少无效解的产生,在生成个体及交叉、变异后均须对个体的基因型进行判断,以去除不满足几何约束条件的基因型。为提高求解效率,采用十进制编码,在选择子代时采用精英策略,选取父代中表现型相对较好的前50%基因型编入子代;采用个体生成函数随机生成符合几何约束条件的新个体作为子代中的变异个体,最终得到新的子代。为确保遗传算法能够以最快速度实现收敛,设置变异概率随迭代次数的增加而减小。通过求解、迭代和优化,最终得到符合几何约束条件的被动地形自适应机构的最优尺寸参数。攀爬机构和越障机构的优化求解过程分别如图7 和图8 所示。
图7
图7
攀爬机构的优化求解过程
Fig.7
Optimization solving process for climbing mechanism
图8
图8
越障机构的优化求解过程
Fig.8
Optimization solving process for obstacle-surmounting mechanism
由图7 50 X 0 = [ 110 ° 277 m m 158 m m ] T m i n f X 0 = 2.976 × 10 - 3 -1 ,此时攀爬机构的抬升高度达到336 mm。如图8 所示,经过约80次的迭代后,越障机构的优化求解过程逐渐收敛,出现最优解X 1 ° T m i n f X 1 = 3.058 × 10 - 3 -1 ,此时越障机构的抬升高度达到327 mm。
已知轮式搜救机器人的轮子半径为150 mm,当障碍物高度为400 mm时,机器人需要翻越的实际高度为250 mm,则被动地形自适应机构的抬升高度大于250 mm即可实现越障。由此可知,攀爬机构和越障机构均满足设计要求。
1.4 地形自适应机构的尺寸参数与布局
通过优化和计算,最终得到轮式搜救机器人被动地形自适应机构的结构尺寸及初始姿态参数,如表3 所示。
搭建轮式搜救机器人的被动地形自适应机构,其整体布局如图9 所示。基于机器人处于水平状态时越障机构的布置情况,计算得到攀爬机构下安装点至越障机构前安装点的距离D 0 =375 mm。
图9
图9
轮式搜救机器人被动地形自适应机构的整体布局
Fig.9
Overall layout of passive terrain adaptive mechanism of wheeled search and rescue robot
2 轮式搜救机器人越障过程分析
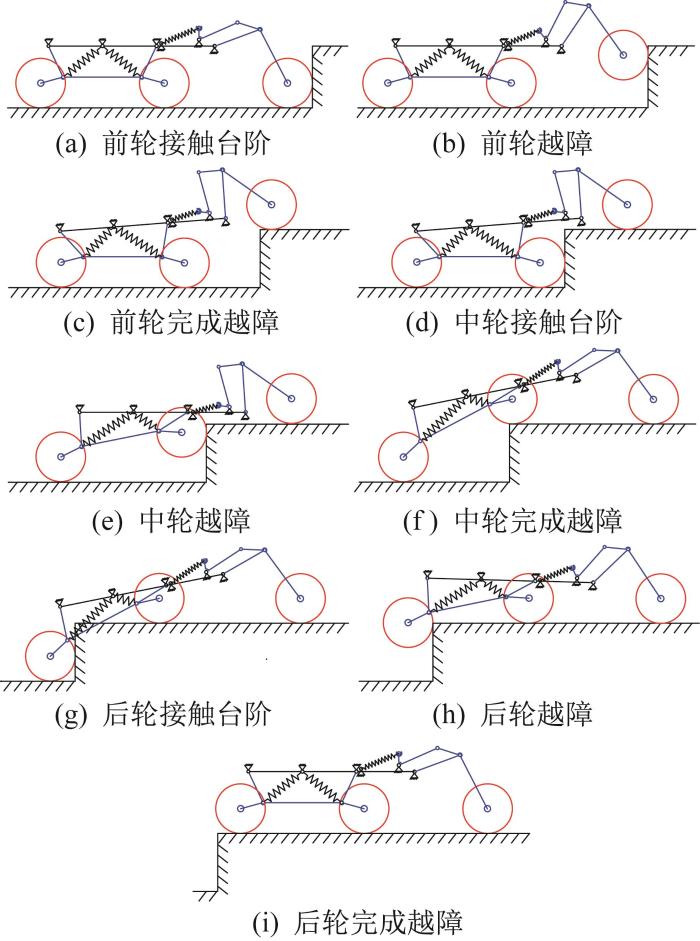
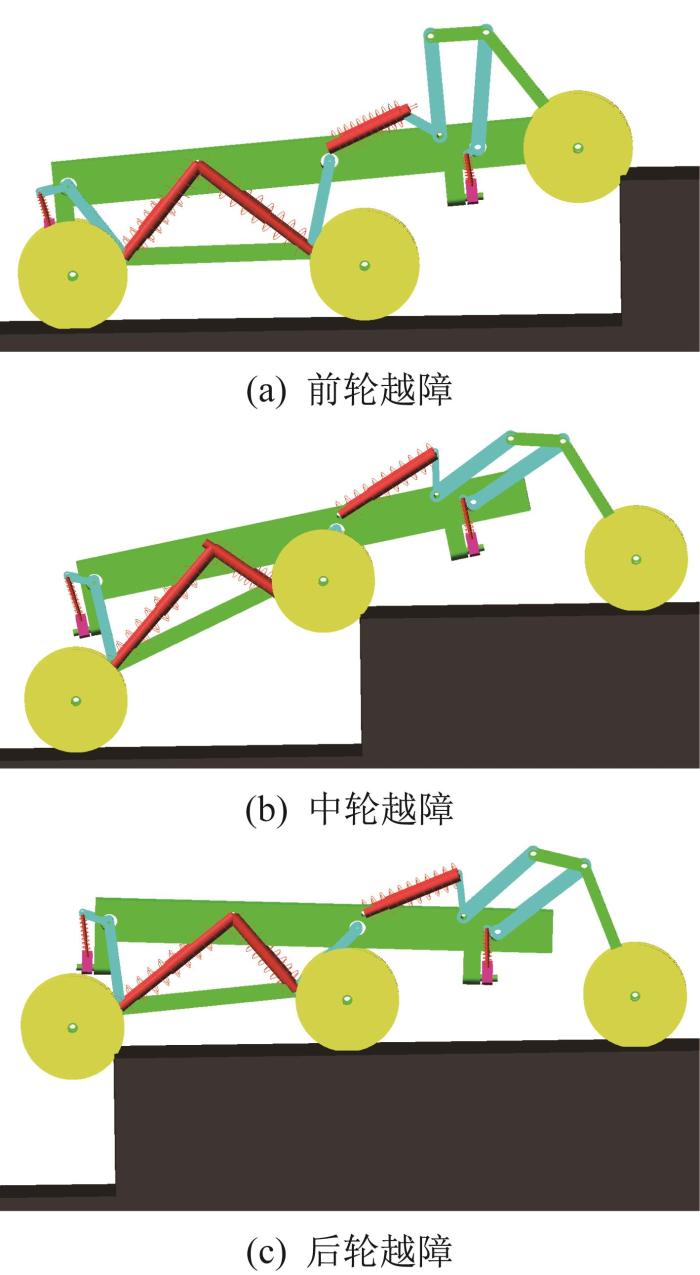
在被动地形自适应机构的辅助下,轮式搜救机器人应具备越过400 mm高垂直台阶的能力。因此,本节将针对轮式搜救机器人爬越400 mm高垂直台阶的过程进行详细分析。如图10 所示,轮式搜救机器人的越障过程主要包括前轮越障、中轮越障、后轮越障三个阶段。
图10
图10
轮式搜救机器人的越障过程
Fig.10
Obstacle-surmounting process of wheeled search and rescue robot
1)前轮越障。如图10 (a)所示,当机器人前轮接触到垂直台阶时,其开始进入越障阶段。前轮因受到垂直台阶阻力的作用,对攀爬机构中的摆杆施加沿逆时针方向的扭矩。在阻力的作用下,攀爬机构中各连杆的位置发生变化,带动前轮向上抬升,如图10 (b)所示;直到前轮达到可越过垂直台阶的高度时,前轮完成越障,如图10 (c)所示。
2)中轮越障。当前轮完成越障后,机器人以图10 (c)所示的姿态继续向前行驶,一段时间后中轮开始与垂直台阶接触,如图10 (d)所示。在垂直台阶的作用下,越障机构中的摆杆受到沿逆时针方向的扭矩的作用,使得越障机构中各连杆的位置发生变化,从而带动中轮向上抬升,如图10 (e)所示。随后,机器人继续向前行驶,直到中轮越过垂直台阶,如图10 (f)所示。
3)后轮越障。当中轮完成越障后,机器人以图10 (f)所示的姿态继续向前行驶,一段时间后后轮与垂直台阶接触,如图10 (g)所示,后轮因受到垂直台阶的阻力,使得越障机构中各连杆的位置发生变化并带动后轮向上抬升,如图10 (h)所示,直到后轮越过垂直台阶,从而完成整个越障过程,如图10 (i)所示。
3 轮式搜救机器人越障过程动力学建模与分析
由上文分析可知,在轮式搜救机器人的整个越障过程中,图10 (b)、图10 (e)、图10 (h)所示的状态为越障过程中的关键状态。因此本节主要以这3个状态建立相应的动力学模型,以对轮式搜救机器人的越障性能进行分析。目前,移动机器人动力学分析方法主要有牛顿-欧拉法、达朗贝尔法和拉格朗日法等[21 -24 ] 。基于轮式搜救机器人的受力特点,本文采用达朗贝尔原理建立其越障过程的动力学模型,并在不考虑轮子与接触面产生相对滑动的情况下,对前、中、后轮在越障过程中的受力情况进行分析。
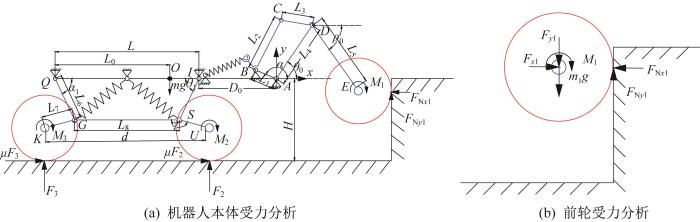
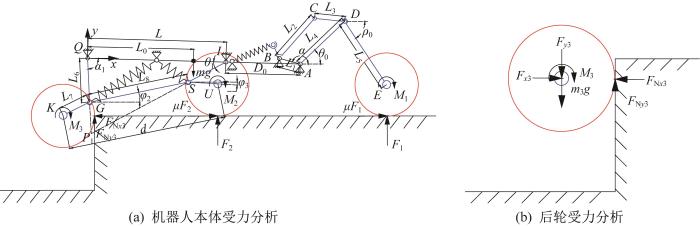
3.1 前轮越障受力分析
如图11 所示,以攀爬机构下安装点A 为原点建立直角坐标系,基于达朗贝尔原理建立前轮越障时轮式搜救机器人本体的力平衡模型。其中,点O 为机器人的质心;m 为机器人质量,m 1 M 1 M 2 M 3 为后 轮转 矩 F N x 1 F N y 1 F x 1 F y 1 F 2 μ F 2 F 3 μ F 3 为后 轮的 附着 力
图11
图11
轮式搜救机器人前轮越障受力分析
Fig.11
Force analysis of front wheel obstacle-surmounting of wheeled search and rescue robot
在前轮越障过程中,设整个机器人的质心沿水平方向的位移为x 1 y 1 ϕ 0 J 0
μ F 3 + μ F 2 - F N x 1 = m x ¨ 1 F 3 + F 2 + F N y 1 - m g = m y ¨ 1 M 3 + M 2 + M 1 + F N x 1 L 5 s i n ρ 0 - L 4 s i n θ 0 + D 0 + L - L 0 s i n ϕ 0 - F N y 1 L 4 c o s θ 0 + L 5 c o s ρ 0 + R + D 0 + L - L 0 c o s ϕ 0 - F 2 L - L 0 c o s ϕ 0 + L 7 c o s 180 ° - γ - L 6 c o s θ 1 - μ F 2 L 7 s i n 180 ° - γ + L 6 s i n θ 1 + L - L 0 s i n ϕ 0 + R + F 3 L 7 c o s 180 ° - γ - L 6 c o s α 1 + L 0 c o s ϕ 0 - μ F 3 L 7 s i n 180 ° - γ + L 6 s i n α 1 + L 0 s i n ϕ 0 + R = J 0 ϕ ¨ 0 (7)
根据图11 (b),对前轮在越障过程中的受力情况进行分析。通过分析可知,前轮的加速度a 1 和角加速度ω 1 式(8)和式(9):
F N y 1 - F y 1 - m 1 g = m 1 a 1 (8)
ω 1 = a 1 R (9)
F x 1 - F N x 1 = 0 F N y 1 - F y 1 - m 1 g = m 1 a 1 M 1 - F N y 1 R = J 1 ω 1 (10)
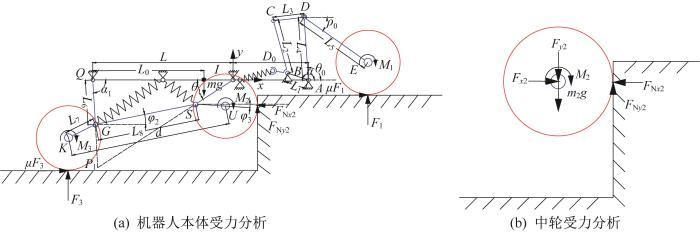
3.2 中轮越障受力分析
同理,如图12 所示,以越障机构前安装点I 为原点建立直角坐标系,并基于达朗贝尔原理建立中轮越障时轮式搜救机器人本体的力平衡方程。图中:m 2 F 1 μ F 1 F N x 2 F N y 2 F x 2 F y 2 图11 同。
图12
图12
轮式搜救机器人中轮越障受力分析
Fig.12
Force analysis of middle wheel obstacle-surmounting of wheeled search and rescue robot
如图12 (a)所示,θ 1 QS =L 12 GS 与x 轴的夹角为φ 2 SU 与x 轴的夹角φ 3 θ 1 L 12 φ 2 φ 3
L 12 = L 2 + L 6 2 - 2 L L 6 c o s θ 1 (11)
∠ Q G S = a r c c o s L 6 2 + L 8 2 - L 12 2 2 L 6 L 8 (12)
φ 2 = 180 ° - α 1 - ∠ Q G S (13)
φ 3 = α 1 + ∠ Q G S - γ (14)
设在中轮越障过程中,整个机器人在水平方向上的位移为x 2 y 2 Q 到机器人质心的距离为L 0
μ F 3 + μ F 1 - F N x 2 = m x ¨ 2 F 3 + F 1 + F N y 2 - m g = m y ¨ 2 M 3 + M 2 + M 1 + F N x 2 L 6 s i n θ 1 + L 7 s i n φ 3 + ( L - L 0 ) s i n ϕ 0 + F N y 2 ( L - L 0 ) c o s ϕ 0 + L 7 c o s φ 3 - L 6 c o s θ 1 + R - F 3 L 7 c o s 180 ° - γ + φ 2 - L 6 c o s α 1 + L 0 c o s ϕ 0 - μ F 3 L 7 s i n 180 ° - γ + φ 2 + L 6 s i n α 1 + L 0 s i n ϕ 0 + R F 1 D 0 + L - L 0 c o s ϕ 0 + L 4 c o s θ 0 + L 5 c o s ρ 0 - μ F 1 L 5 s i n ρ 0 - L 4 s i n θ 0 - D 0 + L - L 0 s i n ϕ 0 + R = J 0 ϕ ¨ 0 (15)
根据图12 (b),对中轮在越障过程中的受力情况进行分析。通过分析可知,中轮的加速度a 2 ω 2 式(16)和式(17):
F N y 2 - F y 2 - m 2 g = m 2 a 2 (16)
ω 2 = a 2 R (17)
F x 2 - F N x 2 = 0 F N y 2 - F y 2 - m 2 g = m 2 a 2 M 2 - F N y 2 R = J 2 ω 2 (18)
3.3 后轮越障受力分析
同理,如图13 所示,以越障机构后安装点Q 为原点建立直角坐标系,基于达朗贝尔原理建立后轮越障时轮式搜救机器人本体的力平衡方程。图中:m 3 为后轮质量;F N x 3 F N y 3 F x 3 F y 3 图11 和图12 同。
图13
图13
轮式搜救机器人后轮越障受力分析
Fig.13
Force analysis of rear wheel obstacle-surmounting of wheeled search and rescue robot
后轮越障时对机器人整体姿态的几何分析、设计和计算与中轮越障时同理。设在后轮越障过程中,机器人在水平方向上的位移为x 3 y 3
μ F 2 + μ F 1 - F N x 3 = m x ¨ 3 F 2 + F 1 + F N y 3 - m g = m y ¨ 3 M 3 + M 2 + M 1 + F N x 3 L 0 s i n ϕ 0 + L 6 s i n α 1 + L 7 s i n 180 ° - γ + φ 2 - F N y 3 L 7 c o s 180 ° - γ + φ 2 - L 6 c o s α 1 + L 0 c o s ϕ 0 - R + F 1 D 0 + L - L 0 c o s ϕ 0 + L 4 c o s θ 0 + L 5 c o s ρ 0 - μ F 1 L 5 s i n ρ 0 - ( D 0 + L - L 0 ) s i n ϕ 0 - L 4 s i n θ 0 + R - F 2 L - L 0 c o s ϕ 0 - L 6 c o s θ 1 + L 7 c o s φ 3 - μ F 2 L 7 s i n φ 3 + L 6 s i n θ 1 - L - L 0 s i n ϕ 0 + R = J 0 ϕ ¨ 0 (19)
如图13 (b)所示,对后轮在越障过程中的受力情况进行分析。通过分析可知,后轮的加速度a 3 ω 3 式(20)和式(21):
F N y 3 - F y 3 - m 3 g = m 3 a 3 (20)
ω 3 = a 3 R (21)
F x 3 - F N x 3 = 0 F N y 3 - F y 3 - m 3 g = m 3 a 3 M 3 - F N y 3 R = J 3 ω 3 (22)
基于上述动力学模型计算可得:在前轮越障过程中,轮式搜救机器人的质心高度上升108 mm,质心俯仰角的变化范围为[- 1 ° , 5 ° - 3 ° , 7.5 ° - 1 ° , 2.4 °
4 轮式搜救机器人越障性能仿真
4.1 多刚体动力学模型的建立
通过建立多刚体动力学模型来对装配被动地形自适应机构的轮式搜救机器人的越障性能进行仿真和分析,以验证在400 mm的障碍高度下机器人完成越障任务的可行性。同时,通过监测机器人在翻越障碍物过程中的空间姿态来考察其稳定性和地形自适应能力。
建立轮式搜救机器人的多刚体动力学模型,如图14 所示。在建模时作如下假设:
图14
图14
轮式搜救机器人多刚体动力学模型
Fig.14
Multi-rigid-body dynamics model of wheeled search and rescue robot
1)忽略车身、车架等部件的具体结构和外形属性,使用质量相等的长方体替代;
2)攀爬机构及越障机构的杆件按照连接需要保留位置信息,简化成连杆;
3)除了阻尼和弹性元件外,其余零件均视作刚体,在仿真过程中不考虑变形;
4.2 动力学仿真分析
将建立的轮式搜救机器人多刚体动力学模型和400 mm高的台阶障碍地形导入ADAMS软件,以开展机器人的越障仿真分析,其越障过程如图15 所示。
图15
图15
轮式搜救机器人越障过程仿真结果
Fig.15
Obstacle-surmounting process simulation results of wheeled search and rescue robot
由图15 可知,轮式搜救机器人在被动地形自适应机构的辅助下能够顺利通过400 mm高的垂直台阶,且行驶过程平稳。
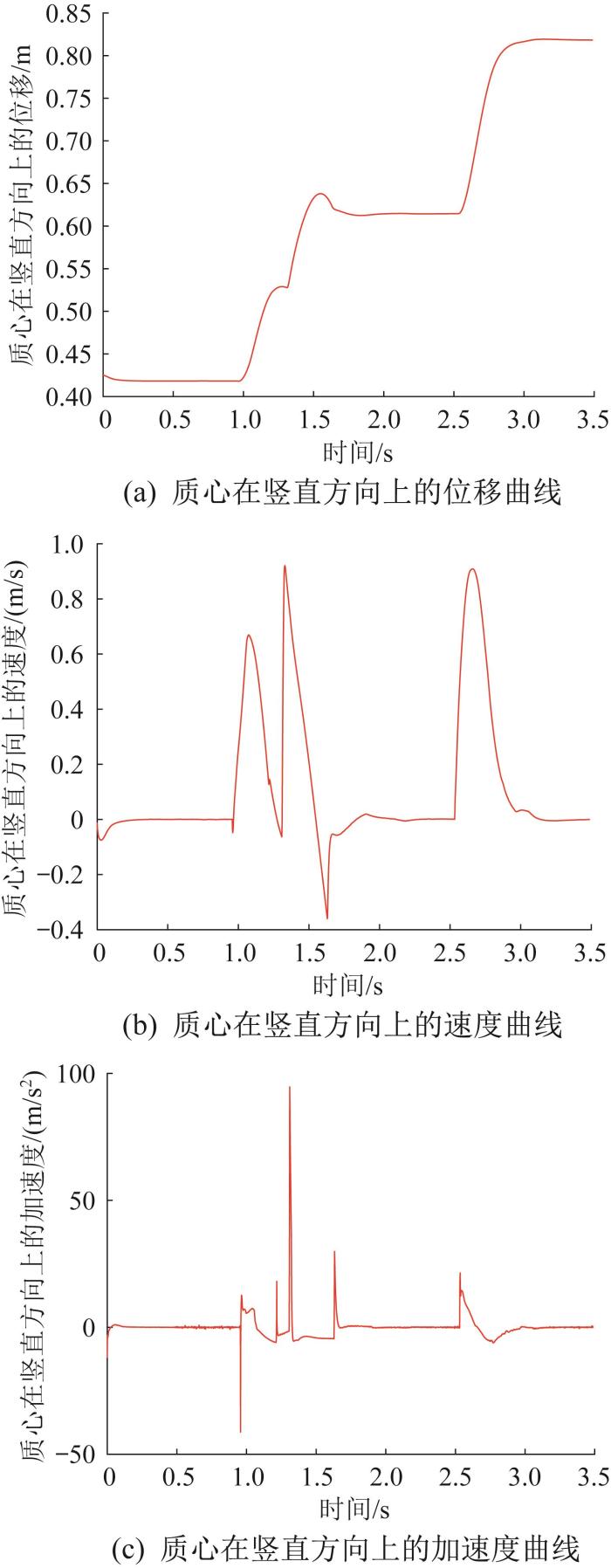
轮式搜救机器人的越障稳定性评价主要参考其质心在竖直方向上的状态参数的变化情况,包括质心在竖直方向上的位移、速度、加速度以及质心俯仰角。通过ADAMS仿真得到轮式搜救机器人质心在越障过程中的位移、速度和加速度曲线,如图16 所示。
图16
图16
轮式搜救机器人越障性能仿真结果
Fig.16
Obstacle-surmounting performance simulation results of wheeled search and rescue robot
由图16 可知,在越障过程中,轮式搜救机器人质心在竖直方向上的加速度在0.8—1.2 s(前轮越障)、1.2—1.7 s(中轮越障)以及2.5—3.0 s(后轮越障)阶段共出现了3次波动,其中前轮和中轮在越障时受到的冲击稍大。当前轮、中轮、后轮依次完成越障后,机器人的质心高度由最初的420 mm 提升到最终的820 mm。
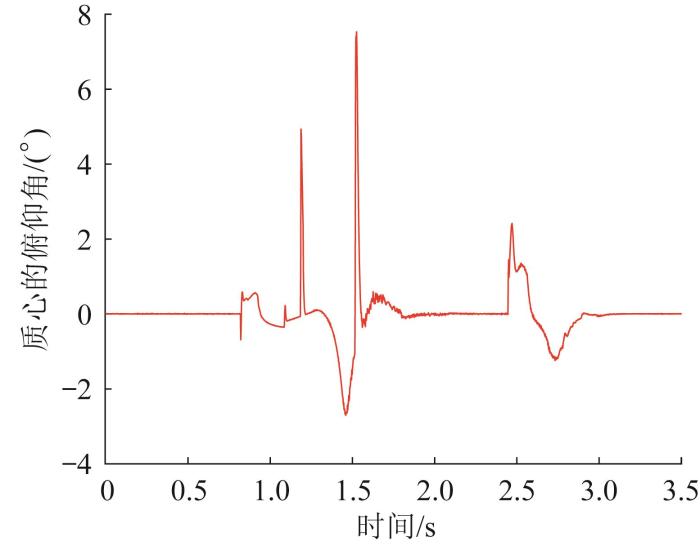
基于由ADAMS仿真得到的轮式搜救机器人质心在越障过程中的位移数据,计算得到质心俯仰角的变化曲线,如图17 所示。由图可知,在越障过程中,机器人质心俯仰角的变化范围为[- 4 ° , 8 °
图17
图17
轮式搜救机器人质心俯仰角变化曲线
Fig.17
Variation curve of centroid pitch angle of wheeled search and rescue robot
基于理论计算可知:在越障过程中,轮式搜救机器人质心高度上升了405 mm,质心俯仰角的变化范围为[- 3 ° , 7.5 °
5 结 论
1)基于对传统越障机构的分析,完成了地形自适应机构的选型,并结合遗传算法对其进行了优化,实现了对轮式搜救机器人被动地形自适应机构的设计。
2)对轮式搜救机器人的越障过程进行了分析,基于达朗贝尔原理建立了其动力学模型,并对其越障性能进行了分析和计算。
3)基于轮式搜救机器人的结构特点,建立了其多刚体动力学模型;利用ADAMS软件对机器人的越障性能进行了仿真,并与理论计算结果进行了对比。对比结果验证了轮式搜救机器人的越障及地形自适应能力,这可为轮式搜救机器人样机的搭建及后续研究的开展提供理论依据。
参考文献
View Option
[1]
祝甜一 基于 ROS 的自主式救援机器人 SLAM 和导航系统研究
[D].南京 :东南大学 ,2015 :1 -4 .
[本文引用: 1]
ZHU T Y Research of SLAM and navigation system of autonomous rescue robots based on ROS
[D]. Nanjing : Southeast University , 2015 : 1 -4 .
[本文引用: 1]
[2]
杨璐 月球车悬架的机理分析及参数优化
[D]. 长春 :吉林大学 ,2007 :13 -18 .
[本文引用: 1]
YANG L Mechanism analysis and parameter optimization on suspension for lunar rover
[D]. Changchun : Jilin University , 2007 : 13 -18 .
[本文引用: 1]
[3]
陈百超 月球车新型移动系统设计
[D].长春 :吉林大学 ,2009 :33 -39 .
[本文引用: 1]
CHEN B C Design of a locomotion system for lunar rover
[D]. Changchun : Jilin University , 2009 : 33 -39 .
[本文引用: 1]
[5]
尚建忠 空间探测机器人移动机构及系统研究
[D].武汉 :华中科技大学 ,2006 :45 -50 .
[本文引用: 1]
SHANG J Z Research on the locomotion mechanism and system of space exploring robot
[D]. Wuhan : Huazhong University of Science and Technology , 2006 : 45 -50 .
[本文引用: 1]
[6]
刘金生 基于ADAMS六轮悬架式火星车的建模与仿真
[D].北京 :北京邮电大学 ,2019 :11 -16 .
[本文引用: 1]
LIU J S Modeling and simulation of a six-wheel suspended rovers based on ADAMS
[D]. Beijing : Beijing University of Posts and Telecommunications , 2019 : 11 -16 .
[本文引用: 1]
[7]
NASA A brief history of the lunar roving vehicle
[EB/OL].(2002-04-03 )[2022-05-17 ]. .
URL
[本文引用: 1]
[8]
卢波 ,范嵬娜 国外月球车及火星车技术发展综述
[C]//中国空间科学学会空间探测专业委员会第十八次学术会议论文集(上册) .重庆 :中国空间科学学会 ,2005 :69 -75 .
[本文引用: 1]
LU B FAN W N A review of the development of lunar rover and mars rover technology abroad
[C]//Proceedings of the 18th Academic Conference of Space Exploration Committee of Chinese Society of Space Sciences . Chongqing : Chinese Society of Space Sciences , 2005 : 69 -75 .
[本文引用: 1]
[9]
THUEER T Mobility evaluation of wheeled all-terrain robots
[J]. Robotics & Autonomous Systems , 2010 , 58 (5 ): 508 -519 .
[本文引用: 1]
[10]
杨武林 自适应关节轮式移动机器人设计与研究
[D].绵阳 :西南科技大学 ,2020 :12 -14 .
[本文引用: 1]
YANG W L Design and research of adaptive-joint wheeled mobile robot
[D]. Mianyang : Southwest University of Science and Technology , 2020 : 12 -14 .
[本文引用: 1]
[11]
关似玉 六轮全地形移动机器人的结构设计及样机研制
[D].北京 :北京石油化工学院 ,2016 :14 -24 .
[本文引用: 1]
GUAN S Y Structural design and prototype development of a six wheel all-terrain mobile robot
[D]. Beijing : Beijing Institute of Petrochemical Technology , 2016 : 14 -24 .
[本文引用: 1]
[12]
王奉晨 全地形轮式移动机器人设计与性能分析
[D].成都 :西南交通大学 ,2018 :2 -7 .
[本文引用: 1]
WANG F C Design and performance analysis of all-terrain wheel mobile robot
[D]. Chengdu : Southwest Jiaotong University , 2018 : 2 -7 .
[本文引用: 1]
[13]
YANG F Structural synthesis and analysis of folded-deployable locomotion system for wheeled planetary rover
[D]. Harbin : Harbin University of Technology , 2014 : 2 -5 .
DOI:10.3901/jme.2014.05.001
[14]
魏毅龙 煤矿井下探测与搜救机器人机械系统设计与研究
[D].徐州 :中国矿业大学 ,2014 :8 -22 .
WEI Y L Design and study of the mechanical system for mine detection and rescue robot
[D]. Xuzhou : China University of Mining and Technology , 2014 : 8 -22 .
[15]
张彦囡 基于多组连杆机构的爬楼越障机器人的设计与分析
[D].青岛 :山东科技大学 ,2017 :9 -17 .
[本文引用: 1]
ZHANG Y N Design and analysis of climbing robot based on multi-group linkage mechanism
[D]. Qingdao : Shandong University of Science and Technology , 2017 : 9 -17 .
[本文引用: 1]
[16]
[本文引用: 1]
WEI J Y YANG S Q WANG J D et al Design and simulation analysis of an eight-wheeled climbing obstacle robot
[J]. Mechanical Science and Technology for Aerospace Engineering , 2019 , 38 (10 ): 1519 -1525 .
DOI:10.13433/j.cnki.1003-8728.20190014
[本文引用: 1]
[17]
[本文引用: 1]
CAO C Z ZHANG J L WANG F Q et al Synthesis of the head mechanism for a new shrimp-shaped six-wheel mobile robot
[J]. Journal of Shandong University of Science and Technology (Natural Science) , 2010 , 29 (1 ): 58 -61 .
DOI:10.16452/j.cnki.sdkjzk.2010.01.018
[本文引用: 1]
[18]
范浩东 ,王宗彦 ,宋灵芝 ,等 基于NSGA-II算法的并联机器人结构分析及优化
[J].机械设计与制造工程 ,2022 ,51 (3 ):53 -57 .
FAN H D WANG Z Y SONG L Z et al Structural analysis and optimization of parallel robot based on NSGA-Ⅱ algorithm
[J]. Machine Design and Manufacturing Engineering , 2022 , 51 (3 ): 53 -57 .
[19]
WANG L ZHANG J J QI K C et al Kinematics performance analysis and scale optimization of parallel mechanism six-dimensional controller
[J]. Machine Design & Research , 2020 , 36 (1 ): 75 -82 .
DOI:10.13952/j.cnki.jofmdr.2020.0016
[20]
[本文引用: 1]
WANG X L WANG X T SUN D D et al Optimization of structural parameters of leg mechanism for a new type of wheel legged quadruped robot
[J]. Journal of Mechanical & Electrical Engineering , 2022 , 39 (4 ): 547 -553 .
DOI:10.3969/j.issn.1001-4551.2022.04.018
[本文引用: 1]
[21]
[本文引用: 1]
LI Y Q GUO Y ZHANG Y et al Dynamic modeling method of spatial passive over-constrained parallel mechanism based on Newton Euler method
[J]. Journal of Mechanical Engineering , 2020 , 56 (11 ): 48 -57 .
DOI:10.3901/jme.2020.11.048
[本文引用: 1]
[22]
ZHU J M LI F C LI H W et al Design and motion analysis of wheel-legged step-climbing mobile robot
[J]. China Mechanical Engineering , 2013 , 24 (20 ): 2722 -2730 .
DOI:10.3969/j.issn.1004-132X.2013.20.005
[23]
刘昌文 ,徐天舒 ,李涛 ,等 基于人车耦合动力学模型的重型卡车平顺性仿真与优化
[J].天津大学学报(自然科学与工程技术版) ,2020 ,53 (7 ):736 -744 .
LIU C W XU T S LI T et al Simulation and optimization of heavy truck ride comfort based on a human-vehicle coupling dynamics model
[J]. Journal of Tianjin University (Science and Technology) , 2020 , 53 (7 ): 736 -744 .
[24]
[本文引用: 1]
WANG C X WANG D J CHEN Y et al Obstacle negotiation performance analysis and simulation for six wheel all-terrain mobile robot
[J]. Manufacturing Automation , 2016 , 38 (12 ): 72 -77 .
DOI:10.3969/j.issn.1009-0134.2016.12.018
[本文引用: 1]
基于 ROS 的自主式救援机器人 SLAM 和导航系统研究
1
2015
... 搜救机器人作为具备越障能力的智能化移动设备,能够代替人力更高效地完成灾后搜救工作,具有广阔的应用前景[1 ] .在复杂地形环境下的搜救工作中,一款具备地形自适应能力的越障机构对提升搜救机器人的移动性能和搜救效率有十分重要的意义. ...
基于 ROS 的自主式救援机器人 SLAM 和导航系统研究
1
2015
... 搜救机器人作为具备越障能力的智能化移动设备,能够代替人力更高效地完成灾后搜救工作,具有广阔的应用前景[1 ] .在复杂地形环境下的搜救工作中,一款具备地形自适应能力的越障机构对提升搜救机器人的移动性能和搜救效率有十分重要的意义. ...
月球车悬架的机理分析及参数优化
1
2007
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
月球车悬架的机理分析及参数优化
1
2007
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
月球车新型移动系统设计
1
2009
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
月球车新型移动系统设计
1
2009
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
双曲柄机构在移动机器人中的应用与优化
1
2007
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
双曲柄机构在移动机器人中的应用与优化
1
2007
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
空间探测机器人移动机构及系统研究
1
2006
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
空间探测机器人移动机构及系统研究
1
2006
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
基于ADAMS六轮悬架式火星车的建模与仿真
1
2019
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
基于ADAMS六轮悬架式火星车的建模与仿真
1
2019
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
A brief history of the lunar roving vehicle
1
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
国外月球车及火星车技术发展综述
1
2005
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
国外月球车及火星车技术发展综述
1
2005
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
Mobility evaluation of wheeled all-terrain robots
1
2010
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
自适应关节轮式移动机器人设计与研究
1
2020
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
自适应关节轮式移动机器人设计与研究
1
2020
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
六轮全地形移动机器人的结构设计及样机研制
1
2016
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
六轮全地形移动机器人的结构设计及样机研制
1
2016
... 目前,国内外学者针对复杂地形自适应机构的研究已取得了较丰硕的成果.吉林大学的杨璐等[2 -3 ] 提出了一种正反四边形悬架机构,通过正反四边形的耦合作用保证了月球车的越障性能和地形自适应能力.中国科学技术大学的陈世荣等[4 ] 研制的双曲柄悬架机构通过受力变形实现机器人轮子的向上抬升,并利用机构间的配合来保证机器人的稳定性和越障能力,且该机构具有较好的地形自适应能力.华中科技大学的尚建忠等[5 ] 提出的四杆悬架机构通过四边形机构的受力变形对机器人的轮子进行抬升,从而提升了机器人的越障能力.北京邮电大学的刘金生[6 ] 对美国喷气推进实验室搭建的火星车中采用的六轮悬架式机构[7 -8 ] 进行了仿真分析,仿真结果验证了该机构在越障时的优越性.此外,瑞士联邦技术学院研制的前叉-平行四边形悬架机构[9 ] 、西南科技大学的杨武林设计的铰接式摇臂悬架机构[10 ] 以及北京石油化工学院的关似玉研发的自适应地形移动机器人平台[11 ] 对移动设备主体的越障能力和地形自适应能力均有较大的提升. ...
全地形轮式移动机器人设计与性能分析
1
2018
... 现阶段,国内的一些高校、研究所和实验室[12 -15 ] 虽已针对上述地形自适应机构的优缺点做了总结和分析,并进行了一定的改进和完善,但这些机构主要应用于月球表面探测,而针对适用于地面搜救环境的被动地形自适应机构的研究相对较少,且现有机构仍有可改进和优化之处. ...
全地形轮式移动机器人设计与性能分析
1
2018
... 现阶段,国内的一些高校、研究所和实验室[12 -15 ] 虽已针对上述地形自适应机构的优缺点做了总结和分析,并进行了一定的改进和完善,但这些机构主要应用于月球表面探测,而针对适用于地面搜救环境的被动地形自适应机构的研究相对较少,且现有机构仍有可改进和优化之处. ...
轮式星球漫游车移动机构折展构型综合与分析
0
2014
轮式星球漫游车移动机构折展构型综合与分析
0
2014
煤矿井下探测与搜救机器人机械系统设计与研究
0
2014
煤矿井下探测与搜救机器人机械系统设计与研究
0
2014
基于多组连杆机构的爬楼越障机器人的设计与分析
1
2017
... 现阶段,国内的一些高校、研究所和实验室[12 -15 ] 虽已针对上述地形自适应机构的优缺点做了总结和分析,并进行了一定的改进和完善,但这些机构主要应用于月球表面探测,而针对适用于地面搜救环境的被动地形自适应机构的研究相对较少,且现有机构仍有可改进和优化之处. ...
基于多组连杆机构的爬楼越障机器人的设计与分析
1
2017
... 现阶段,国内的一些高校、研究所和实验室[12 -15 ] 虽已针对上述地形自适应机构的优缺点做了总结和分析,并进行了一定的改进和完善,但这些机构主要应用于月球表面探测,而针对适用于地面搜救环境的被动地形自适应机构的研究相对较少,且现有机构仍有可改进和优化之处. ...
八轮式爬楼越障机器人设计与仿真分析
1
2019
... 攀爬机构能够向上抬升的条件为:在四边形连杆机构ABCD 通过变形将前轮中心E 点向上抬升的过程中,E 点的运动轨迹不能越过竖直切面,同时应保证摆杆CDE 的速度瞬心P 0 始终位于前轮中心E 点的下方[16 ] .综上所述,以连杆AB 为基础、A 点为原点建立直角坐标系(x 轴与地面平行,下文同),构建如图3 所示的攀爬机构几何模型.设AB =L 1 BC =L 2 CD =L 3 AD =L 4 DE =L 5 BD =L 11 ∠ BAD =α 0 ∠ ABD =β 0 ∠ CBD =φ 0 ∠ CDB =δ 0 ∠ BDA =ε 0 AB 与y 轴的夹角为λ 0 DA 与x 轴的夹角为θ 0 ,BA 与x 轴的夹角为α ,DE 与x 轴的夹角为ρ 0 H =420 mm. ...
八轮式爬楼越障机器人设计与仿真分析
1
2019
... 攀爬机构能够向上抬升的条件为:在四边形连杆机构ABCD 通过变形将前轮中心E 点向上抬升的过程中,E 点的运动轨迹不能越过竖直切面,同时应保证摆杆CDE 的速度瞬心P 0 始终位于前轮中心E 点的下方[16 ] .综上所述,以连杆AB 为基础、A 点为原点建立直角坐标系(x 轴与地面平行,下文同),构建如图3 所示的攀爬机构几何模型.设AB =L 1 BC =L 2 CD =L 3 AD =L 4 DE =L 5 BD =L 11 ∠ BAD =α 0 ∠ ABD =β 0 ∠ CBD =φ 0 ∠ CDB =δ 0 ∠ BDA =ε 0 AB 与y 轴的夹角为λ 0 DA 与x 轴的夹角为θ 0 ,BA 与x 轴的夹角为α ,DE 与x 轴的夹角为ρ 0 H =420 mm. ...
虾形六轮移动机器人头部机构综合
1
2010
... 基于上文构建的优化模型,采用遗传算法[17 -20 ] 对满足几何约束条件的被动地形自适应机构各杆件的尺寸参数进行优化求解.遗传算法的求解流程如图6 所示. ...
虾形六轮移动机器人头部机构综合
1
2010
... 基于上文构建的优化模型,采用遗传算法[17 -20 ] 对满足几何约束条件的被动地形自适应机构各杆件的尺寸参数进行优化求解.遗传算法的求解流程如图6 所示. ...
基于NSGA-II算法的并联机器人结构分析及优化
0
2022
基于NSGA-II算法的并联机器人结构分析及优化
0
2022
并联机构六维控制器的运动学性能分析及尺度优化
0
2020
并联机构六维控制器的运动学性能分析及尺度优化
0
2020
一种新型轮腿四足机器人腿部机构结构参数优化
1
2022
... 基于上文构建的优化模型,采用遗传算法[17 -20 ] 对满足几何约束条件的被动地形自适应机构各杆件的尺寸参数进行优化求解.遗传算法的求解流程如图6 所示. ...
一种新型轮腿四足机器人腿部机构结构参数优化
1
2022
... 基于上文构建的优化模型,采用遗传算法[17 -20 ] 对满足几何约束条件的被动地形自适应机构各杆件的尺寸参数进行优化求解.遗传算法的求解流程如图6 所示. ...
基于牛顿欧拉法的一种空间被动过约束并联机构动力学建模方法
1
2020
... 由上文分析可知,在轮式搜救机器人的整个越障过程中,图10 (b)、图10 (e)、图10 (h)所示的状态为越障过程中的关键状态.因此本节主要以这3个状态建立相应的动力学模型,以对轮式搜救机器人的越障性能进行分析.目前,移动机器人动力学分析方法主要有牛顿-欧拉法、达朗贝尔法和拉格朗日法等[21 -24 ] .基于轮式搜救机器人的受力特点,本文采用达朗贝尔原理建立其越障过程的动力学模型,并在不考虑轮子与接触面产生相对滑动的情况下,对前、中、后轮在越障过程中的受力情况进行分析. ...
基于牛顿欧拉法的一种空间被动过约束并联机构动力学建模方法
1
2020
... 由上文分析可知,在轮式搜救机器人的整个越障过程中,图10 (b)、图10 (e)、图10 (h)所示的状态为越障过程中的关键状态.因此本节主要以这3个状态建立相应的动力学模型,以对轮式搜救机器人的越障性能进行分析.目前,移动机器人动力学分析方法主要有牛顿-欧拉法、达朗贝尔法和拉格朗日法等[21 -24 ] .基于轮式搜救机器人的受力特点,本文采用达朗贝尔原理建立其越障过程的动力学模型,并在不考虑轮子与接触面产生相对滑动的情况下,对前、中、后轮在越障过程中的受力情况进行分析. ...
轮腿式爬楼梯移动机器人的设计及运动特性分析
0
2013
轮腿式爬楼梯移动机器人的设计及运动特性分析
0
2013
基于人车耦合动力学模型的重型卡车平顺性仿真与优化
0
2020
基于人车耦合动力学模型的重型卡车平顺性仿真与优化
0
2020
六轮全地形移动机器人越障性能分析与仿真
1
2016
... 由上文分析可知,在轮式搜救机器人的整个越障过程中,图10 (b)、图10 (e)、图10 (h)所示的状态为越障过程中的关键状态.因此本节主要以这3个状态建立相应的动力学模型,以对轮式搜救机器人的越障性能进行分析.目前,移动机器人动力学分析方法主要有牛顿-欧拉法、达朗贝尔法和拉格朗日法等[21 -24 ] .基于轮式搜救机器人的受力特点,本文采用达朗贝尔原理建立其越障过程的动力学模型,并在不考虑轮子与接触面产生相对滑动的情况下,对前、中、后轮在越障过程中的受力情况进行分析. ...
六轮全地形移动机器人越障性能分析与仿真
1
2016
... 由上文分析可知,在轮式搜救机器人的整个越障过程中,图10 (b)、图10 (e)、图10 (h)所示的状态为越障过程中的关键状态.因此本节主要以这3个状态建立相应的动力学模型,以对轮式搜救机器人的越障性能进行分析.目前,移动机器人动力学分析方法主要有牛顿-欧拉法、达朗贝尔法和拉格朗日法等[21 -24 ] .基于轮式搜救机器人的受力特点,本文采用达朗贝尔原理建立其越障过程的动力学模型,并在不考虑轮子与接触面产生相对滑动的情况下,对前、中、后轮在越障过程中的受力情况进行分析. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}