轮式搜救机器人地形自适应机构设计及越障性能分析
Terrain adaptive mechanism design and obstacle-surmounting performance analysis of wheeled search and rescue robot
轮式搜救机器人地形自适应机构设计及越障性能分析 |
| 赵迪,陈果,陈小利,王熊锦 |
|
Terrain adaptive mechanism design and obstacle-surmounting performance analysis of wheeled search and rescue robot |
| Di ZHAO,Guo CHEN,Xiaoli CHEN,Xiongjin WANG |
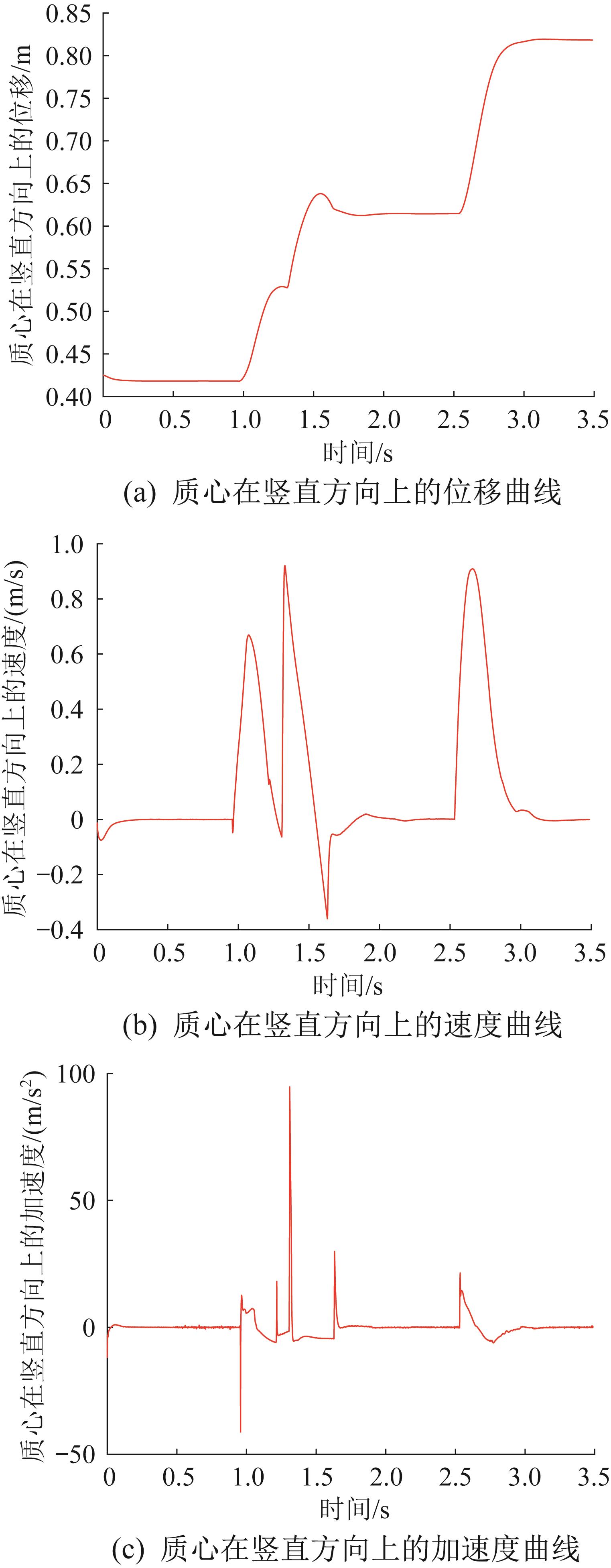
| 图16 轮式搜救机器人越障性能仿真结果 |
| Fig.16 Obstacle-surmounting performance simulation results of wheeled search and rescue robot |
|
|