血管介入手术在多种外科手术中得到广泛应用,如心血管外科手术等,被认为是当前最具有应用价值的临床治疗手段之一[1 ] 。但是血管介入手术也存在相对明显的弊端,例如医生必须穿上厚重的铅衣,以保护自身免受辐射影响。不过这只能减少50%左右的辐射暴露,仍会对介入医生造成严重的职业危害[2 -4 ] 。为了保护介入医生免受透视辐射引起的潜在危害并尽量减小患者的辐射剂量,近几十年来,许多研究者一直致力于开发机器人系统,旨在精确地引导和定位用于基于导管的介入手术的介入工具,例如导丝、微导管、球囊和支架。这些血管介入手术机器人系统通常采用主从控制方式,可以缩短手术时间并减少患者对造影剂和辐射的暴露,同时可实现介入医生通过辐射防护罩后面的远程控制台进行手术[5 ] ,远离X射线的伤害。在机器人的帮助下,专家、医生等可以远程对患者进行及时诊断和治疗,最大限度地提高患者的生存率[6 ] 。
国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] 。日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM)。意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体。加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器。美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动。日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作。2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] 。
国内一些研究机构也对血管介入手术机器人进行了研究。哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究。中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究。北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构。上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人。天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性。
为了提高介入手术递送精度和实现力的准确测量,笔者设计了一种具有力检测机制的新型血管介入手术机器人。首先,对所设计机器人系统的构型和力检测机制进行详细介绍;然后,根据机器人的运动原理,建立其动力学方程,以得到其二阶传递函数;接着,设计模糊PID(proportional integral derivative,比例积分微分)控制器,并通过仿真来分析和验证其功能;最后,针对机器人系统开展一系列性能评价实验,以验证其可行性。
1 血管介入手术机器人设计
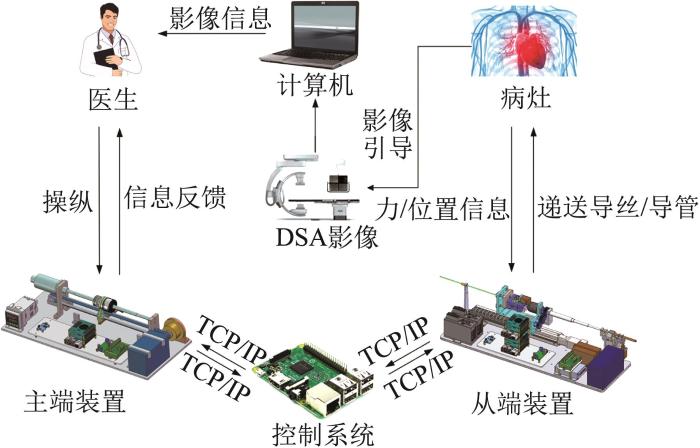
所设计的血管介入手术机器人是一个主从系统,由主端装置、从端装置和控制系统组成。图1 所示为血管介入手术机器人系统原理:医生在隔离室内操纵主端装置;控制系统接收操纵信号并向从端装置传递控制指令;从端装置实时复现医生手部的操纵动作,并代替医生在手术室内完成导丝/导管的递送。在手术过程中,从端装置实时检测导丝/导管的力信息和位置信息,通过控制系统进行数据处理后传递至外接显示器,医生结合显示器实时显示的力/位置信息进行下一步操作,保证手术安全。
图1
图1
血管介入手术机器人系统原理
Fig.1
Principle of vascular interventional surgery robot system
1.1 主端装置结构设计
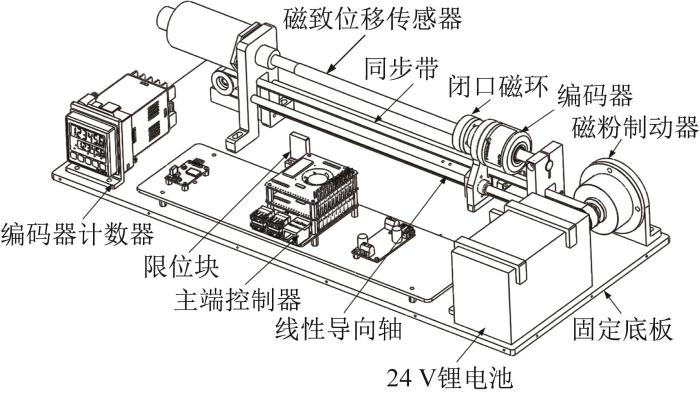
图2 所示为血管介入手术机器人主端装置的结构,主要由闭口磁环、磁致位移传感器、编码器、编码器计数器和磁粉制动器等组成。其中:闭口磁环用于直接操作;磁致位移传感器用于提供轴向位移信息;编码器用于检测径向旋转的运动信息;编码器计数器用于显示编码器检测的运动信息;磁粉制动器用于提供制动力。医生通过直接操作闭口磁环,实现对从端装置轴向平移和径向旋转的远程控制。
图2
图2
主端装置结构示意
Fig.2
Structure diagram of master device
1.2 从端装置结构设计
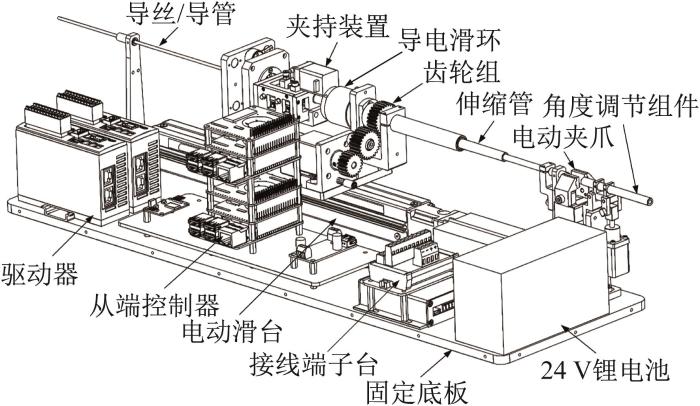
图3 所示为血管介入手术机器人从端装置的结构,主要由电动滑台、齿轮组、夹持装置、导电滑环和角度调节组件等组成。其中:电动滑台用于实现轴向直线运动;齿轮组用于实现径向旋转运动;夹持装置用于灵活夹紧导丝/导管;导电滑环用于避免引线在旋转过程中发生缠绕现象;角度调节组件用于调整导丝/导管的角度。当从端装置接收到主端装置发送的信号后,即可精准地复现医生对导丝/导管的递送和旋捻操作。
图3
图3
从端装置结构示意
Fig.3
Structure diagram of slave device
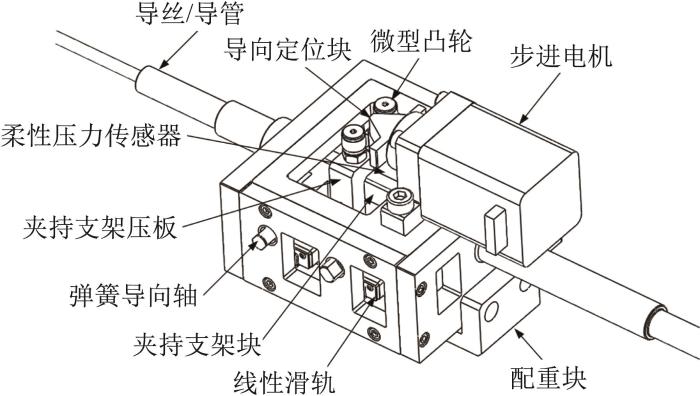
图4 所示为夹持装置结构,可代替医生实现对导丝/导管的夹紧和松开。夹持装置主要由步进电机、微型凸轮、柔性压力传感器、线性滑轨和夹持支架块等组成。其中:步进电机用于提供动力;微型凸轮用于固定凸轮与导向定位块的初始位置且保持自身旋转;柔性压力传感器用于测量导丝/导管的真实夹紧力;线性滑轨用于实现小距离移动;夹持支架块用于夹紧导丝/导管。步进电机的输入轴与导向定位块直接连接,可实现步进电机旋转运动与导向定位块直线运动的转换。当导向定位块被推至微型凸轮处时,在推力的作用下,夹持支架块会向两侧移动,进而实现松开的功能;当导向定位块轴向退回时,夹持支架块会向内侧移动,进而实现夹紧的功能。在夹持支架块之间安装柔性压力传感器,可以准确测量从导丝/导管处传递过来的夹紧力信息。
图4
图4
夹持装置结构示意
Fig.4
Structure diagram of clamping device
1.3 力检测机制设计
1.3.1 轴向近端力检测机制设计
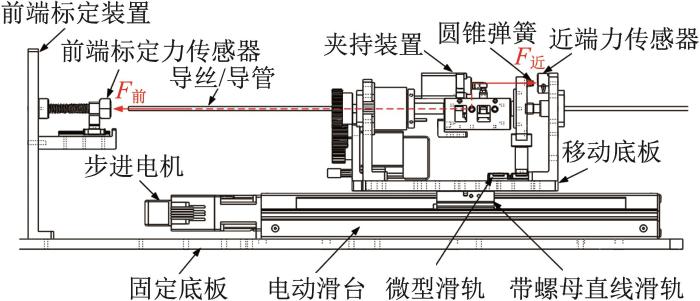
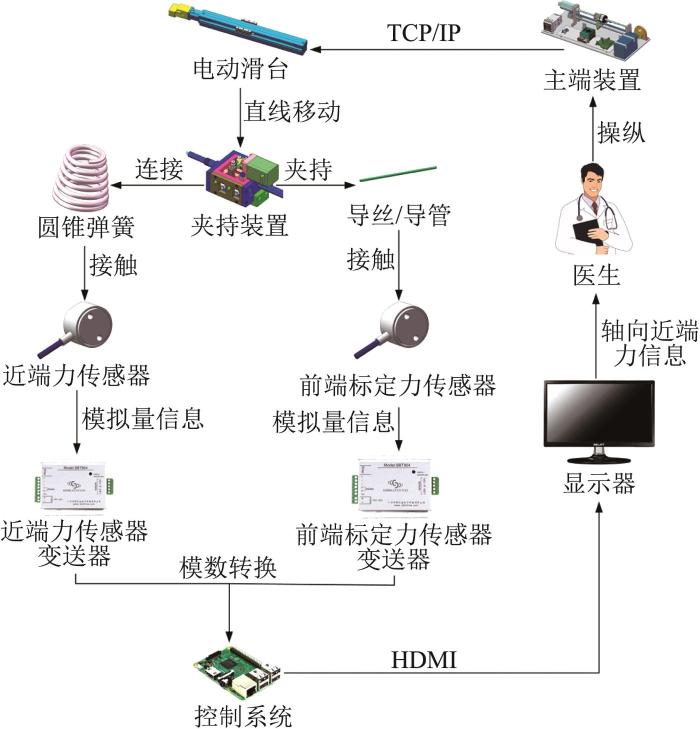
图5 和图6 所示分别为血管介入手术机器人轴向近端力检测原理和流程。该机制由电动滑台、夹持装置、前端标定力传感器、近端力传感器、前端标定力传感器变送器、近端力传感器变送器、圆锥弹簧和导丝/导管等组成的传动系统实现。其中:电动滑台用于实现直线运动;夹持装置用于夹持导丝/导管;前端标定力传感器用于测量导丝/导管前端受到的真实阻力;近端力传感器用于测量夹持装置因导丝/导管所受阻力而产生的反作用力;前端标定力传感器变送器用于对前端标定力传感器检测到的力值数据进行模数转换;近端力传感器变送器用于对近端力传感器检测到的力值数据进行模数转换;圆锥弹簧用于实现将面接触转换为点接触。当导丝/导管在夹紧状态下跟随电动滑台进行直线运动时,在导丝/导管的尖端接触前端标定力传感器后,夹持装置在阻力的作用下反向移动,使得圆锥弹簧接触近端力传感器,从而实现轴向近端力检测。
图5
图5
轴向近端力检测原理
Fig.5
Detection principle of axial proximal force
图6
图6
轴向近端力检测流程
Fig.6
Detection process of axial proximal force
1.3.2 径向夹紧力检测机制设计
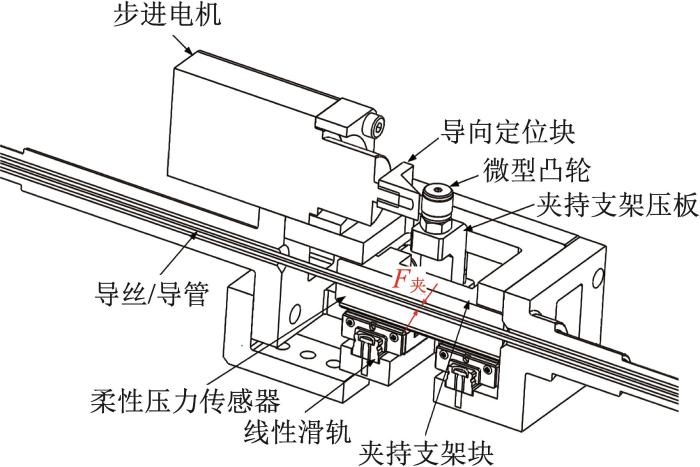
图7 和图8 所示分别为血管介入手术机器人径向夹紧力检测原理和流程。该机制由步进电机、导向定位块、微型凸轮、夹持支架压板、夹持支架块、线性滑轨和柔性压力传感器等组成的传动系统实现。其中:步进电机用于实现导向定位块的直线运动;夹持支架压板用于连接微型凸轮和夹持支架块;线性滑轨用于实现夹持支架块的小距离移动;柔性压力传感器用于测量导丝/导管所受的真实夹紧力。当步进电机的丝杆处于收缩状态时,导向定位块在约束下作直线运动,当其接触到微型凸轮时,微型凸轮会绕自身轴线旋转,进而保持导向定位块的直线运动;夹持支架块在线性滑轨的约束下会向内侧小距离移动,并正向接触导丝/导管,此时导丝/导管处于夹紧状态,通过柔性压力传感器实现径向夹紧力的检测。
图7
图7
径向夹紧力检测原理
Fig.7
Detection principle of radial clamping force
图8
图8
径向夹紧力检测流程
Fig.8
Detection process of radial clamping force
2 血管介入手术机器人动力学分析
2.1 从端装置轴向平移运动的动力学建模
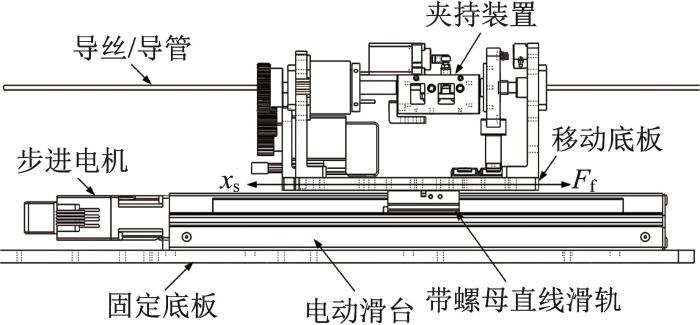
从端装置的动态性能直接决定了血管介入手术机器人的精度和性能[25 ] ,因此须对其进行动力学分析。从端装置实现平移运动的结构主要包括电动滑台、移动底板和夹持装置等,其轴向平移的动力学模型如图9 所示。
图9
图9
从端装置轴向平移的动力学模型
Fig.9
Dynamics model of axial translation of slave device
从端装置的轴向平移原理为:由平移运动步进电机提供动力,电机的输入轴与滚珠丝杠直接连接,滚珠丝杠与带螺母直线滑轨紧密配合,移动底板通过螺栓紧固在直线滑轨上,夹持装置安装在移动底板上;当电机正反转运动时,电机输入轴的旋转运动就会转换为移动底板的直线运动。
根据从端装置运动的传递过程,忽略运动过程中各部件间摩擦和变形等非线性因素的影响,依次建立从端装置各部件的动力学方程。在本文中,为从端装置提供轴向运动动力的步进电机选用EASM2XE020AZAK_Motor,其动力学方程为:
T 移 = J 移 d 2 θ 移 d t 2 + B 移 d θ 移 d t + T 丝 (1)
式中:T 移 N ⋅ m J 移 k g ⋅ m 2 θ 移 r a d B 移 T 丝 为滚珠丝杠的转矩,N ⋅ m
T 丝 = J 丝 d 2 θ 移 d t 2 + T t (2)
T t = p 2 π η 1 F t (3)
F t = m s d 2 x s d t 2 + F f + F e (4)
F f = μ v d x s d t + μ c m s g (5)
x s = p 2 π θ 移 (6)
式中:J 丝 为滚珠丝杠的转动惯量,k g ⋅ m 2 T t 为滚珠丝杠的扭矩,N ⋅ m F t 为滚珠丝杠的推力,N;p η 1 m s x s F f F e 为导丝/导管在手术过程中与血液等产生的摩擦力,可忽略不计,N;μ v μ c
联立式(1)至式(6)解得,平移运动步进电机驱动力矩与移动底板轴向位移之间的关系为:
T 移 = 2 π p J 移 + J 丝 + p 2 m s 4 π 2 η 1 d 2 x s d t 2 + 2 π p B 移 + μ v p 2 4 π 2 η 1 d x s d t + p μ c m s g 2 π η 1 (7)
通过查阅手册和计算可得,从端装置轴向平移的动力学参数的具体值如表1 所示。
2.2 从端装置径向旋转运动的动力学建模
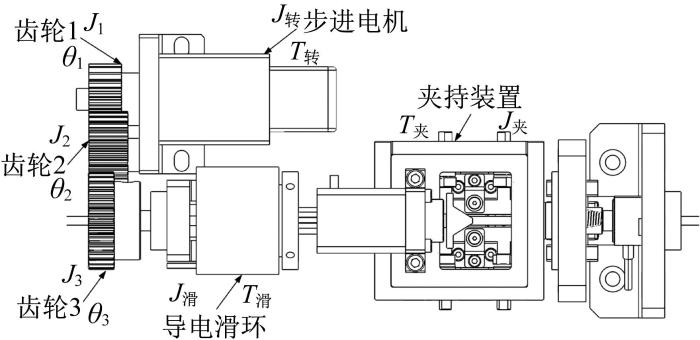
从端装置实现旋转运动的结构主要包括步进电机、齿轮组(齿轮1、齿轮2和齿轮3)、夹持装置和导电滑环等,其径向旋转的动力学模型如图10 所示。
图10
图10
从端装置径向旋转的动力学模型
Fig.10
Dynamics model of radial rotation of slave device
从端装置的径向旋转原理为:旋转运动步进电机提供动力,电机输入轴与齿轮1直接连接,齿轮1、齿轮2、齿轮3相互啮合,齿轮3与夹持装置直接连接,进而实现夹持装置的旋转运动。基于此,建立从端装置各部件的动力学方程。其中,径向旋转步进电机的动力学方程为:
T 转 = J 转 d 2 θ 1 d t 2 + B 转 d θ 1 d t + T 1 (8)
式中:T 转 N ⋅ m J 转 k g ⋅ m 2 θ 1 B 转 T 1 N ⋅ m
T 1 = J 1 d 2 θ 1 d t 2 + T 2 (9)
式中:J 1 k g ⋅ m 2 T 2 N ⋅ m
T 2 = J 2 d 2 θ 2 d t 2 + T 3 (10)
式中:J 2 k g ⋅ m 2 θ 2 T 3 N ⋅ m
T 3 = J 3 d 2 θ 3 d t 2 + T 滑 + T 夹 (11)
式中:J 3 k g ⋅ m 2 θ 3 T 滑 N ⋅ m T 夹 N ⋅ m
T 滑 = J 滑 d 2 θ 3 d t 2 (12)
T 夹 = J 夹 d 2 θ 3 d t 2 (13)
i 1 = θ 1 θ 2 (14)
i 2 = θ 2 θ 3 (15)
联立式(8)至式(15)解得,旋转运动步进电机驱动力矩与导丝/导管旋转角度的关系为:
T 转 = i 1 i 2 J 转 + J 1 + J 2 i 1 + J 3 + J 滑 + J 夹 i 1 i 2 d 2 θ 3 d t 2 + i 1 i 2 B 转 d θ 3 d t (16)
通过查阅手册和计算可得,从端装置径向旋转的动力学参数的具体值如表2 所示。
3 血管介入手术机器人控制系统设计
所设计的血管介入手术机器人系统中可能存在多个非线性的不确定因素,如机器人系统的摩擦力、血液的阻力以及导丝/导管与血管壁的摩擦力等,因此采用工业上常用的PID控制方法。随着计算机技术的发展和模糊控制技术的应用,操作人员将调整PID参数的经验作为知识库存入计算机,根据现场实际情况,计算机自动调整PID参数,即模糊PID控制器。该控制器将经典的PID控制与先进的模糊推理相结合,可实现系统的最优控制[26 ] 。
3.1 常规PID 控制器设计
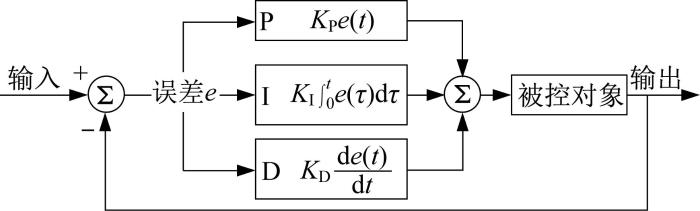
PID控制器是一种在工业控制应用中常见的反馈回路部件[27 ] 。PID控制器将收集到的数据与参考值进行比较,然后将这个差值用于计算新的输入值,目的是让系统的数据达到或者保持为参考值。PID控制器可以根据历史数据和差值的变化率来调整输入值,使系统更加准确且稳定。常规PID控制器控制率的一般形式如下:
u t = K P e t + K I ∫ 0 t e τ d τ + K D d e t d t (17)
式中:K P 为比例系数;K I 为积分系数;K D 为微分系数。
图11
图11
常规PID控制器框图
Fig.11
Block diagram of conventional PID controller
3.2 模糊PID 控制器设计
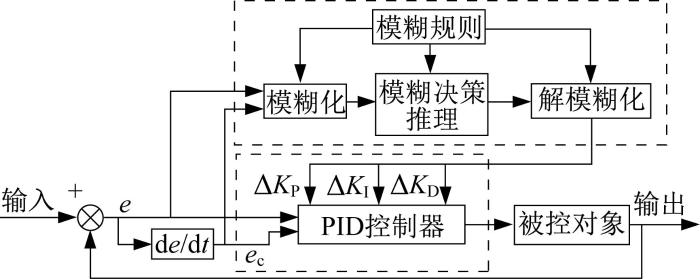
模糊PID控制器是根据误差e 和误差变化率e c 来确定用模糊规则表示的经验PID参数:在实际控制过程中,根据实时误差e 和误差变化率e c 进行模糊推理,以确定PID参数的变化量,并传递给PID控制器。因此,模糊PID控制器是在常规PID控制器的基础上,利用模糊控制器对PID控制器的3个参数进行整定。模糊推理将误差e 和误差变化率e c 作为输入,PID控制器的K P 、K I 、K D 作为输出,根据控制对象模型的变化,满足不同时间对PID控制参数自整定的要求。利用模糊规则和模糊推理在线整定PID控制参数,构成模糊PID控制器,其结构如图12 所示。
图12
图12
模糊PID控制器框图
Fig.12
Block diagram of fuzzy PID controller
3.2.1 模糊控制器设计
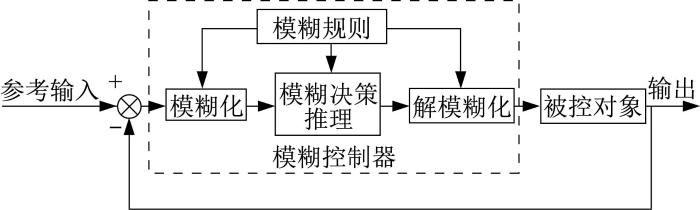
本文设计的模糊控制器的输入包括误差e 和误差变化率e c (e c =de /dt ),其原理如图13 所示。
图13
图13
模糊控制结构框图
Fig.13
Block diagram of fuzzy control structure
3.2.2 模糊化
Δ K = F C e , e c (18)
式中:FC表示模糊控制器;(e , e c )为输入变量;Δ K P 、Δ K I 、Δ K D 为输出变量。
通过选择适当的隶属度函数µ z U =[-1, 1],输出变量Δ K P 、Δ K I 、Δ K D 的模糊理论域分别为N Δ K P N Δ K I N Δ K D z 的基本域是连续的,其隶属度函数µ z
μ ( z ) = 0 , z ≤ a z - a b - a , a < z ≤ b c - z c - b , b < z < c 0 , z ≥ c (19)
由此,输入变量的模糊子集A 1 和A 2 被确定为{负大,负中,负小,零,正小,正中,正大},对应的符号为{NB,NM,NS,ZE,PS,PM,PB};输出变量的模糊子集B 1 、B 2 和B 3 被确定为{负大,负中,负小,零,正小,正中,正大},对应的符号为{NB,NM,NS,ZE,PS,PM,PB}。
3.2.3 模糊控制规则
根据专家的操作经验和工程技术人员的知识储备,建立了合适的模糊控制规则[28 ] ,如表3 所示。
表3 所示的模糊推理过程由49条IF‒THEN规则组成,这些规则是针对试验错误的结果制定的,可经过实际测试来处理输入变量的不可预测性。系统变量在阶跃响应中的可能取值被用来设置PID控制增益的模糊区间,以及模糊控制器中的精确控制信号。通过观察输入变量取值变化的过程来验证模糊规则的有效性。例如:
IF e is NB and e c is NM,THEN Δ K P is PB,Δ K I is NB, Δ K D is NS
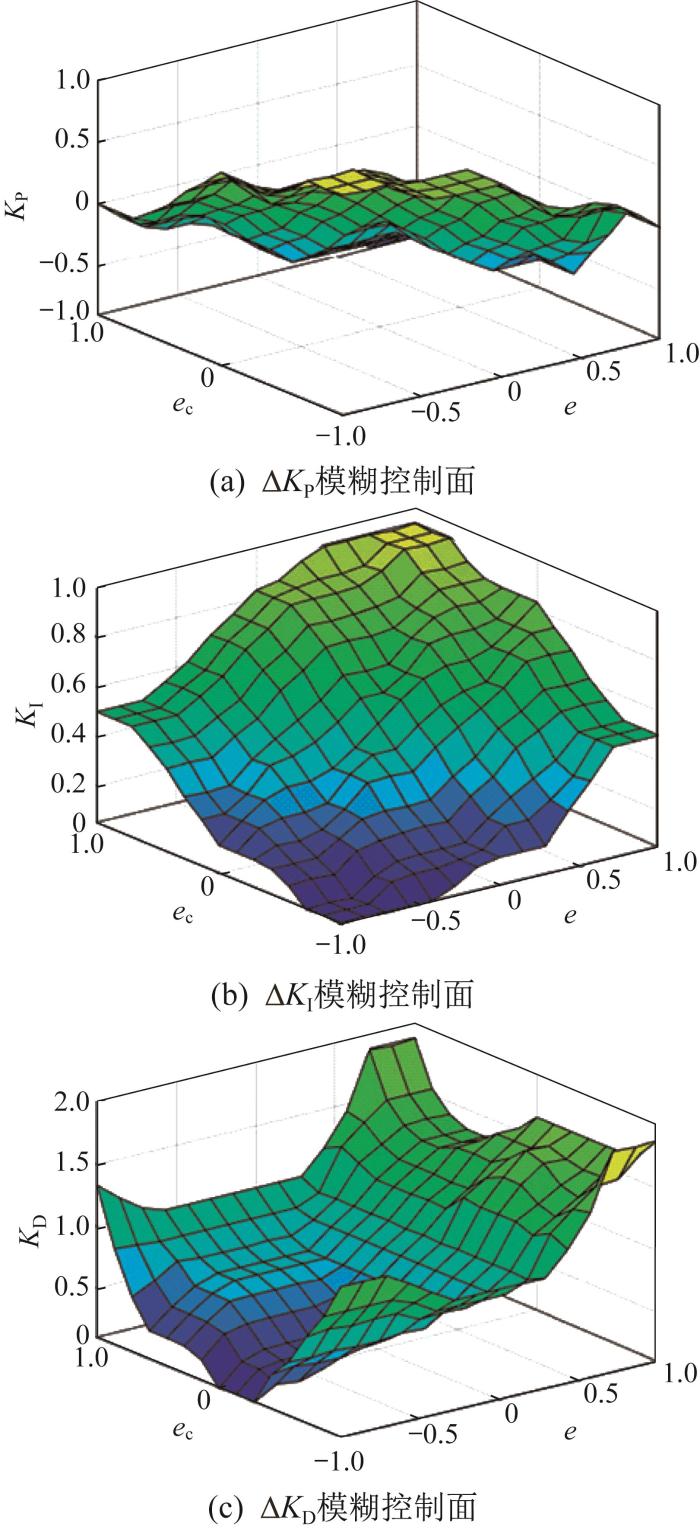
这意味着,若误差e 为负大,误差变化率e c 为负中,则Δ K P 为正大,Δ K I 为负大,Δ K D 为负小。基于此,模糊控制器的输出变量Δ K P 、Δ K I 、Δ K D 的模糊控制面如图14 所示。
图14
图14
输出变量∆K P 、∆K I 和∆K D 的模糊控制面
Fig.14
Fuzzy control surfaces for output variables ∆K P , ∆K I and ∆K D
3.2.4 解模糊化
由模糊控制器输出模糊集合。根据公式k =u /n 将模糊域变换为基本域。其中,k 为系数,u 为隶属度函数曲线与横坐标轴所围成多边形的重心,n 为隶属度函数曲线与横坐标轴所围成多边形的面积。采用面积重心法对参数进行解模糊处理:
z 0 = d f ( z ) = ∫ a b z μ ( z ) d z ∫ a b μ ( z ) d z (20)
式中:z 0 为精确值;z 为模糊值;[a , b ]为理论域。
利用式(20),可以得到解模糊化的量化因子:Δ K P =0.744、Δ K I =0.324、Δ K D =0.667。
3.3 控制系统仿真分析
根据上文分析,得到从端装置轴向平移的动力学方程,并代入各参数的数值,通过拉普拉斯变换,得到该控制系统的二阶传递函数:
G s = 0.96 0.96 s 2 + 0.05 s + 2.5 (21)
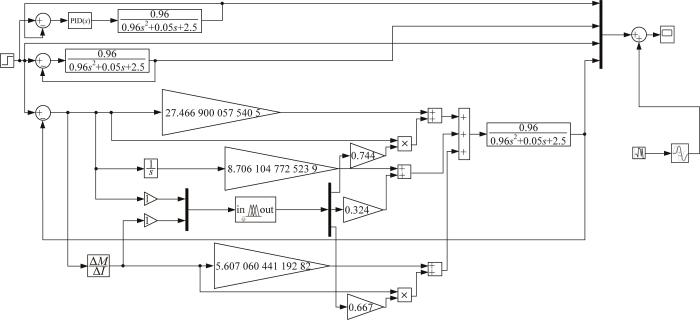
在MATLAB/Simulink环境中搭建模糊PID控制器,如图15 所示。选择阶跃信号来评估其跟踪性能,并添加随机干扰信号来观察其抗干扰能力。
图15
图15
MATLAB/Simulink环境下的模糊PID控制器
Fig.15
Fuzzy PID controller in MATLAB/Simulink environment
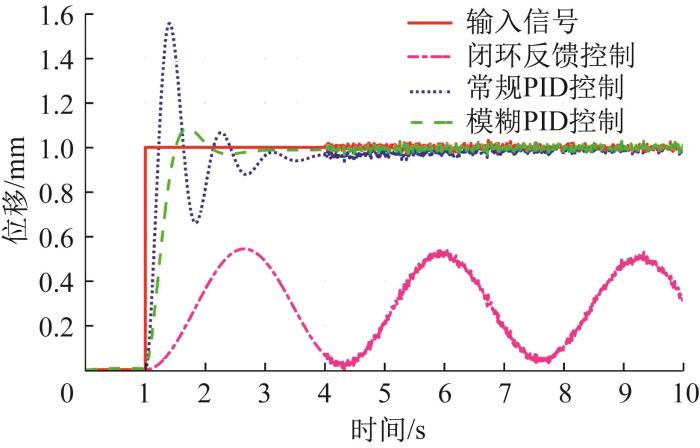
设置阶跃信号采样周期为0.01 s,通过仿真分析得到在闭环反馈控制下、常规PID控制下和模糊PID控制下阶跃信号的响应曲线,如图16 所示。
图16
图16
不同控制方式下阶跃信号的响应曲线
Fig.16
Response curves of step signal under different control modes
从图16 所示的仿真结果可以看出,闭环反馈信号具有很大的波动且达到平衡状态的时间较长;而常规PID控制器和模糊PID控制器可以使原始信号更快地达到平衡。当t =1.4 s时,常规PID控制信号的波动较大,超调量为55.7%;当t =1.7 s时,模糊PID控制信号的波动很小,超调量为10%,说明模糊PID控制器具有较小的超调量和较高的稳定性。当t =3 s时,模糊PID控制信号达到平衡状态;当t =7 s时,常规PID控制信号达到平衡状态,说明模糊PID控制器具有更快的响应速度。综上可知,在相同干扰信号下,模糊PID控制器比常规PID控制器响应速度快、超调量小、稳态误差小,且受干扰信号的影响较小。
4 实验验证
为了验证所设计血管介入手术机器人的性能,首先,通过实验分析模糊PID控制器的抗干扰能力及机器人的运动跟踪性能;然后,通过轴向近端力、径向夹紧力检测评估实验来验证机器人力检测机制的可靠性和稳定性。
4.1 主从运动跟踪实验
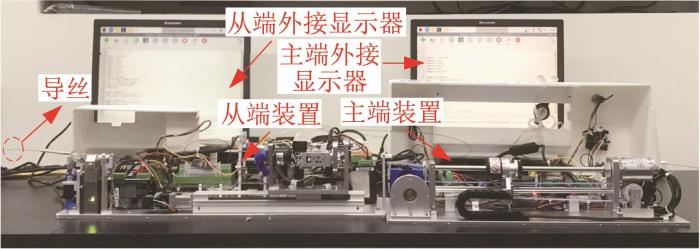
对于血管介入手术机器人系统,准确地将导丝/导管推入患者的冠状动脉狭窄或阻塞处是整个手术的关键步骤,而机器人的运动跟随性能是决定手术成功与否的关键因素。血管介入手术机器人主从运动跟踪实验装置如图17 所示。该实验装置由主端装置和从端装置组成,当实验人员任意推拉主端装置时,从端装置会跟随并复现运动。在主从控制器的作用下,记录机器人系统在常规PID控制和模糊PID控制下的从端位移信号和响应时间。
图17
图17
主从运动跟踪实验装置
Fig.17
Master-slave motion tracking experimental device
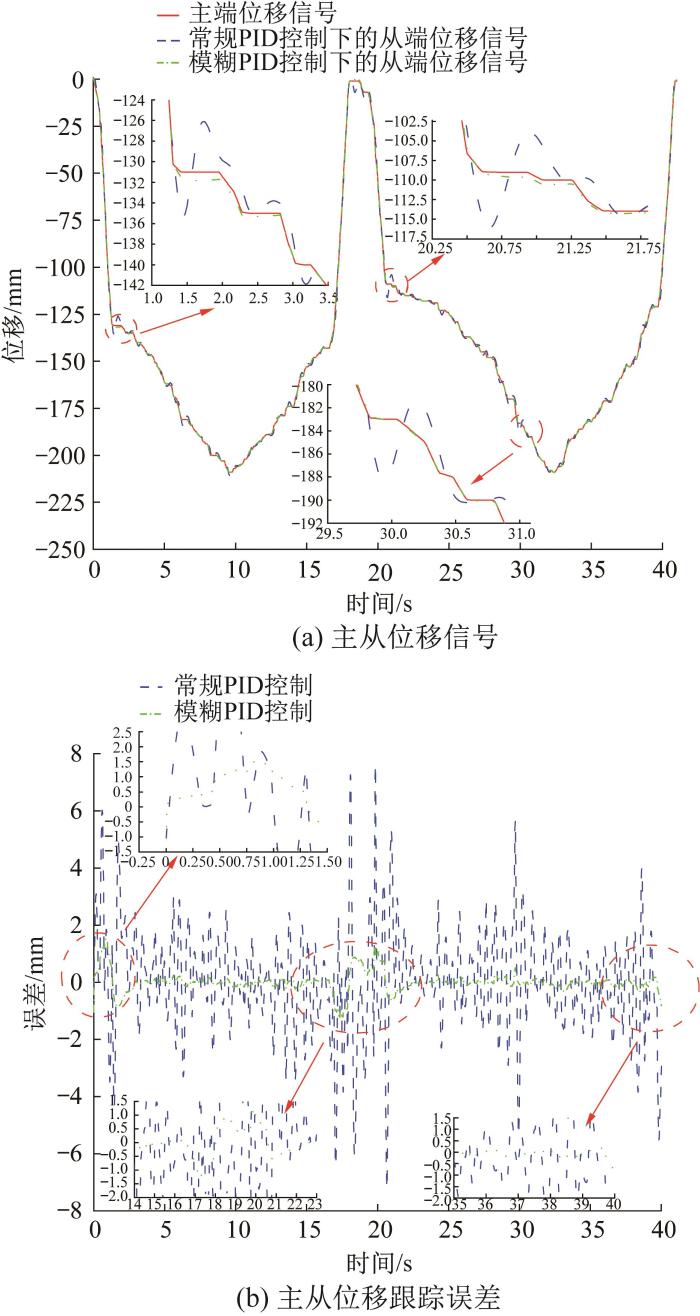
图18 所示为血管介入手术机器人主从运动跟踪实验结果。由图18 (a)所示的主从位移信号可知,在主从运动跟踪实验中,模糊PID控制下从端装置较常规PID控制下具有更稳定的跟随性能。图18 (b)所示的主从位移跟踪误差表明,常规PID控制下的跟踪误差保持在[-7.2, 7.6] mm,模糊PID控制下的跟踪误差保持在[-0.31, 0.25] mm;跟踪误差发生骤变的时刻为t =0.87,17.34,40.48 s,对应的跟踪误差分别为1.52,-1.22,-0.95 mm。这是因为在0— 0.87 s阶段,机器人系统刚启动;在0.87—17.34 s阶段,机器人系统由低速转换为高速(即加速度骤增);在40.48—42 s阶段,机器人系统由高速转换为停止(即加速度骤降)。
图18
图18
主从运动跟踪实验结果
Fig.18
Experimental results of master-slave motion tracking
4.2 轴向近端力检测评估实验
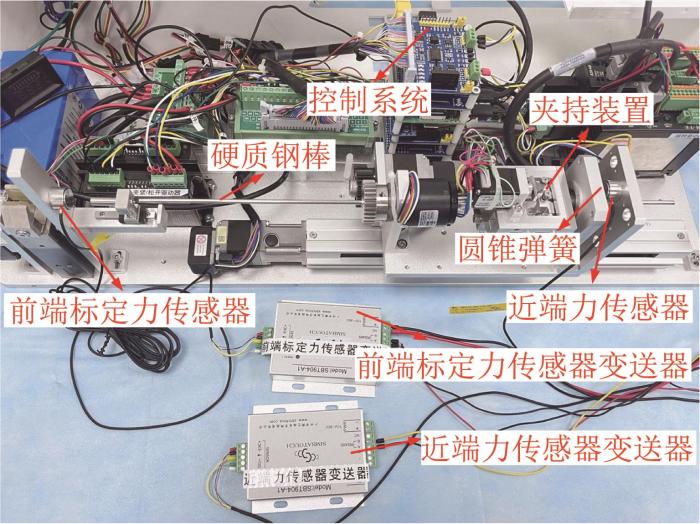
为了验证血管介入手术机器人的轴向近端力检测性能,分别开展静态标定实验和动态标定实验,实验装置如图19 所示。该实验装置由夹持装置、硬质钢棒、圆锥弹簧、前端标定力传感器(SBT674-1KG微型压力传感器,精度等级为0.1%,斯巴拓,中国)、近端力传感器(SBT674-2KG微型压力传感器,精度等级为0.1%,斯巴拓,中国)、前端标定力传感器变送器(SBT904-C2称重测力变送器,显示精度为0.1%,斯巴拓,中国)和近端力传感器变送器(SBT904-C2称重测力变送器,显示精度为0.1%,斯巴拓,中国)等组成。机器人从端装置水平放置,用硬质钢棒代替导丝来实现力传递;前端标定力传感器固定在从端装置前,并使前端标定力传感器的中心与硬质钢棒的中心保持在同一轴线上;近端力传感器固定在从端装置上;圆锥弹簧固定在从端装置的压阻压板上。当硬质钢棒在夹紧状态下和从端装置一起作轴向直线运动时,硬质钢棒的尖端接触前端标定力传感器后,夹持装置会在阻力的作用下反向移动,使得圆锥弹簧接触近端力传感器,从而实现轴向近端力检测。
图19
图19
轴向近端力检测评估实验装置
Fig.19
Experimental device for detection and evaluation of axial proximal force
4.2.1 静态标定实验
实验人员推动主端装置进行轴向直线运动,从端装置复现主端装置动作。先以0.01 mm为步长,推进1 mm位移后,再以0.01 mm为步长,退回1 mm位移,重复5组,同时记录前端标定力传感器及近端力传感器显示的直线运动阻力,完成静态标定实验。
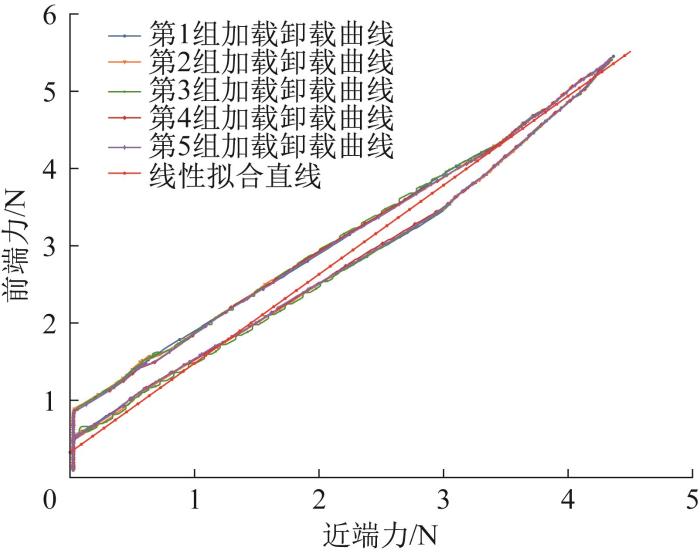
图20 所示为轴向近端力静态标定实验结果,其中横坐标的近端力为夹持装置受到的硬质钢棒前端所受阻力的反作用力,由近端力传感器获取;纵坐标的前端力为硬质钢棒前端所受阻力,由前端标定力传感器获取。通过最小二乘法对对近端力和前端力进行线性拟合。结果表明,5组加载卸载曲线可重复性高,稳定性强,线性度好。在从端装置开始推进位移时,当前端标定力传感器显示的力值为0.6 N后,近端力传感器才开始显示数据,这是由从端装置结构自身的最大静摩擦力导致的。
图20
图20
静态标定实验结果
Fig.20
Static calibration experiment results
4.2.2 动态标定实验
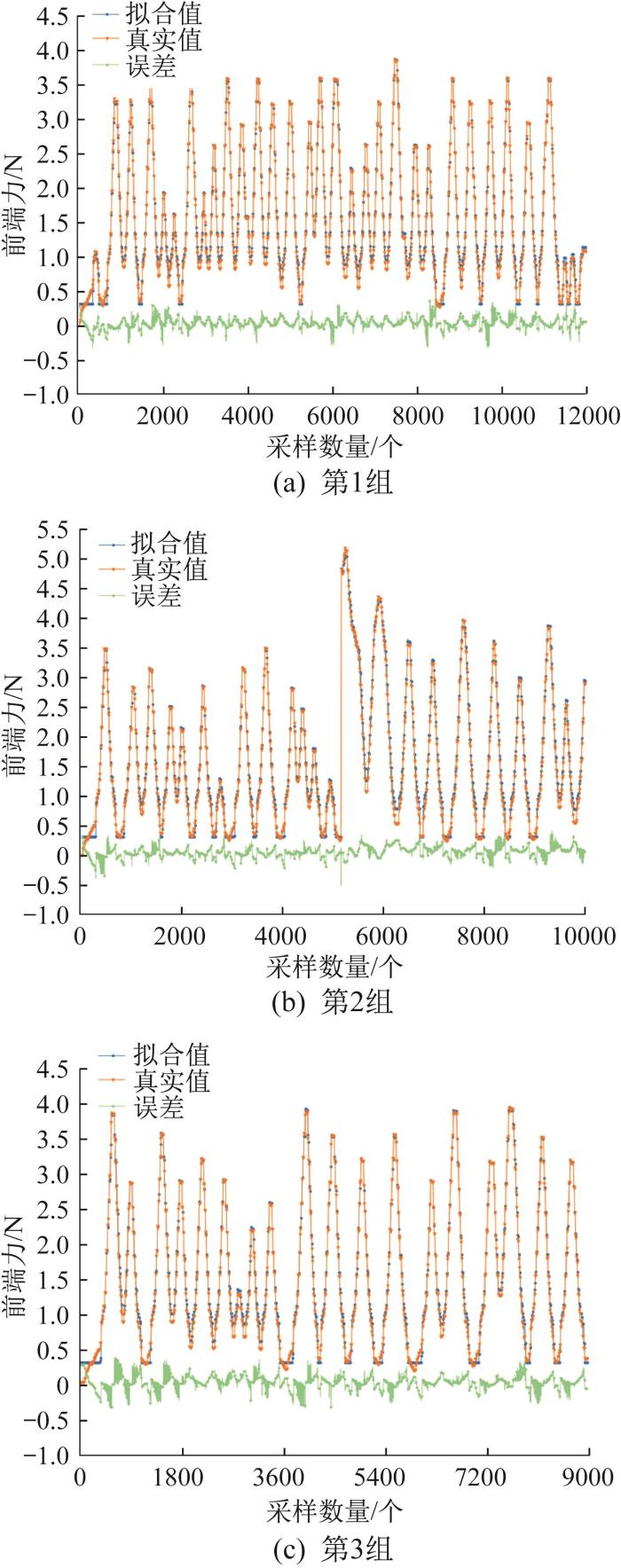
实验人员任意推拉主端装置,从端装置复现主端装置动作,重复3组,同时记录前端标定力传感器和近端力传感器的力值,完成动态标定实验,结果如图21 所示。
图21
图21
动态标定实验结果
Fig.21
Dynamic calibration experiment results
从图21 中可以看出,3组动态标定实验结果均表明,前端力的平均误差稳定在0.12 N,验证了所设计血管介入手术机器人系统轴向近端力检测机制的精准性,可以辅助医生安全有效地完成介入手术。
4.3 径向夹紧力检测评估实验
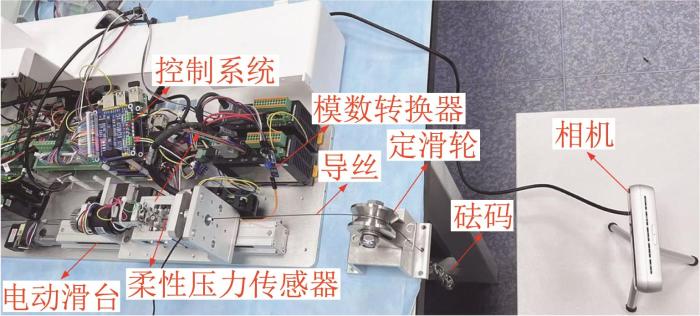
为了验证血管介入手术机器人的径向夹紧力检测性能,开展径向夹紧力检测评估实验,实验装置如图22 所示。该实验装置由电动滑台、夹持装置、柔性压力传感器(DF9-40-2KG,精度等级为1%,能斯达,中国)、模数转换器(ADS1115,微雪,中国)、相机(REAL SENCE,D455,Intel,美国)、定滑轮和砝码等组成。从端装置水平放置,将导丝一端置于夹持装置中线处并夹紧,另一端与质量为血管受力安全阈值的砝码(0.385 N)固定连接[29 ] ,并通过定滑轮实现受力方向的改变。
图22
图22
径向夹紧力检测评估实验装置
Fig.22
Experimental device for detection and evaluation of radial clamping force
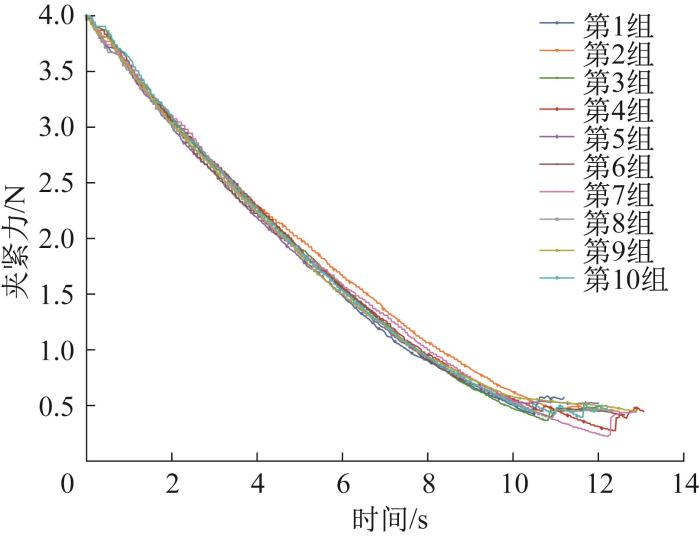
将导丝置于同一力度的夹紧状态下,砝码悬置于同一高度,通过相机监测砝码高度的相对变化。在夹持装置从夹紧状态逐渐进入松开状态的过程中,柔性压力传感器实时检测夹紧力,相机实时监测砝码的高度,当砝码的高度发生相对变化时,停止记录。上述实验重复10组,完成径向夹紧力检测评估实验,结果如图23 所示。
图23
图23
径向夹紧力检测评估实验结果
Fig.23
Experiment result of radial clamping force detection and evaluation
由图23 可以看出,10组夹紧力变化曲线的可重复性高,稳定性好。在夹持装置由夹紧状态逐渐进入松开状态时,夹紧力逐渐减小;当砝码所处高度发生相对变化时,各组夹紧力平均稳定在0.47 N,说明血管介入手术机器人夹持装置的最小夹紧力为0.47 N;在10—13.6 s 内,各组数据均出现抖动现象,这是因为当导丝发生滑动时,导丝与夹持装置间的摩擦力发生了变化。当径向夹紧力检测评估实验结束后,导丝表面未受到损坏,即验证了血管介入手术机器人夹持装置的径向夹紧力为4 N时,不会损坏导丝。综上可知,该血管介入手术机器人夹持装置的径向夹紧力感知范围为0.47~4 N。
5 结论和未来工作
本文介绍了一种具有力检测机制的新型血管介入手术机器人及其控制方法。该机器人系统是一个主从控制系统,其特点是能够代替医生将导丝/导管安全有效地递送至病灶位置,完成血管介入手术。机器人的运动包括夹松、旋捻和推进导丝/导管。为了保证递送运动的精度,根据机器人的动力学模型,设计了模糊PID控制器,并选择阶跃信号对控制器的抗干扰能力进行了仿真验证。最后,通过主从运动跟踪实验验证了血管介入手术机器人的跟随性能。为了建立精准的力检测机制,通过轴向近端力、径向夹紧力检测评估实验验证了血管介入手术机器人的力检测性能。实验结果表明,所设计的模糊PID控制器可使机器人达到[-0.31, 0.25] mm的跟踪误差;所设计的力检测机制可使机器人轴向近端力检测误差达到0.12 N和感知0.47~4 N的径向夹紧力。该轴向近端力检测误差在手术安全范围以内,径向夹紧力的感知范围可保证导丝表面不会因夹紧力过大而被损坏。由此可知,所设计的血管介入手术机器人可以安全有效地辅助医生准确地传递导丝/导管。
然而,本文也存在一些局限性:一是动力学模型的建立没有考虑血管内部环境对导丝/导管的影响;二是需要减小主从运动中的滞后效应。后续将对血管介入手术机器人进行改进,以克服上述缺陷,并通过相关实验验证其性能。
参考文献
View Option
[1]
KAZANZIDES P FICHTINGER G HAGER G et al Surgical and interventional robotics: core concepts, technology, and design
[J]. IEEE Robotics & Automation Magazine , 2008 , 15 (2 ): 122 -130 .
[本文引用: 1]
[2]
NETO F A B ALVES A F F MASCARENHAS Y M et al Occupational radiation exposure in vascular interventional radiology: a complete evaluation of different body regions
[J]. Physica Medica , 2016 , 32 (8 ): 1019 -1024 .
[本文引用: 1]
[3]
ANDREASSI M G PICCALUGA E GUAGLIUMI G et al Occupational health risks in cardiac catheterization laboratory workers
[J]. Circulation Cardiovascular Interventions , 2016 , 9 (4 ): 132 -134 .
[4]
EPSTEIN S SPARER E H TRAN B N et al Prevalence of work-related musculoskeletal disorders among surgeons and interventionalists: a systematic review and meta-analysis
[J]. JAMA Surgery , 2018 , 153 (2 ): e174947 .
[本文引用: 1]
[5]
HEDYEH R T PAYNE C J YANG G Z Current and emerging robot-assisted endovascular catheterization technologies: a review
[J]. Annals of Biomedical Engineering , 2014 , 42 (4 ): 697 -715 .
[本文引用: 1]
[6]
TANIMOTO M ARAI F FUKUDA T et al Telesurgery system for intravascular neurosurgery
[C]//International Conference on Medical Image Computing and Computer-Assisted Intervention , Berlin : Springer , 2000 : 29 -39 .
[本文引用: 1]
[7]
GHAMRAOUI A K RICOTTA J J Current and future perspectives in robotic endovascular surgery
[J]. Current Surgery Reports , 2018 , 6 : 21 .
[本文引用: 1]
[8]
KHAN E M FRUMKIN W ANDRE N G et al First experience with a novel robotic remote catheter system: Amigo™ mapping trial
[J]. Journal of Interventional Cardiac Electrophysiology , 2013 , 37 (2 ): 121 -129 .
[9]
MANGELS D R GIRI J HIRSHFELD J et al Robotic-assisted percutaneous coronary intervention
[J]. Catheterization and Cardiovascular Interventions , 2017 , 90 (6 ): 948 -955 .
[本文引用: 1]
[10]
ARAI F FUJIMURA R FUKUDA T et al New catheter driving method using linear stepping mechanism for intravascular neurosurgery
[C]// Proceeding of 2002 IEEE International Conference on Robotics and Automation . Washington, DC , May 11-15 , 2002 .
[本文引用: 1]
[11]
LAURA Cercenelli EMANUELA Marcelli GIANNI Plicchi et al Initial experience with a telerobotic system to remotely navigate and automatically reposition standard steerable EP catheters
[J]. ASAIO Journal , 2007 , 53 (5 ): 523 -529 .
[本文引用: 1]
[12]
THAKUR Y BAX J , HOLDSWORTH D W et al Design and performance evaluation of a remote catheter navigation system
[J]. IEEE Transaction on Biomedical Engineering , 2009 , 56 (7 ): 1901 -1908 .
[本文引用: 1]
[13]
SRIMATHVEERAVALLI G KESAVADAS T LI X Y Design and fabrication of a robotic mechanism for remote steering and positioning of interventional devices
[J]. The International Journal of Medical Robotics and Computer Assisted Surgery , 2010 , 6 (2 ): 160 -170 .
[本文引用: 1]
[14]
GUO Jian GUO Shu-xiang XIAO Nan et al A novel robotic catheter system with force and visual feedback for vascular interventional surgery
[J]. International Journal of Mechatronics and Automation , 2012 , 2 (1 ): 15 -24 .
[本文引用: 1]
[15]
PATEL T M SHAH S C PANCHOLY S B Long distance tele-robotic-assisted percutaneous coronary intervention: a report of first-in-human experience
[J]. eClinicalMedicine , 2019 , 14 : 53 -58 .
[本文引用: 1]
[16]
LEMOS P A FRANKEN M MARIANI J et al Robotic-assisted intervention strategy to minimize air exposure during the procedure: a case report of myocardial infarction and COVID-19
[J]. Cardiovascular Diagnosis and Therapy , 2020 , 10 (5 ): 1345 -1351 .
[本文引用: 1]
[17]
FU Yi-li LIU Hao WANG Shu-guo et al Skeleton-based active catheter navigation
[J]. The International Journal of Medical Robotics and Computer Assisted Surgery , 2009 , 5 (2 ): 125 -135 .
[本文引用: 1]
[18]
FU Yi-li GAO An-zhu LIU Hao et al Development of a novel robotic catheter system for endovascular minimally invasive surgery
[C]//The 2011 IEEE/ICME International Conference on Complex Medical Engineering , Harbin , May 22-25 , 2011 .
[本文引用: 1]
[19]
JI Cheng HOU Zeng-guang XIE Xiao-liang An image-based guidewire navigation method for robot-assisted intravascular interventions
[C]//2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society , Boston, Aug. 30-Sep . 3 , 2011 .
[本文引用: 1]
[20]
LIU Da LIU Deng-ling Accuracy experimental study of the vascular interventional surgical robot propulsive mechanism
[C]//The 2011 IEEE/ICME International Conference on Complex Medical Engineering , Harbin , May 22-25 , 2011 .
[本文引用: 1]
[21]
BIAN Gui-bin XIE Xiao-liang FENG Zhen-qiu et al An enhanced dual-finger robotic Hand for Catheter manipulating in vascular intervention: a preliminary study
[C]//2013 IEEE International Conference on Information and Automation (ICIA) , Yinchuan, Aug . 26 -28 , 2013 .
[本文引用: 1]
[22]
PENG Wei-li XIAO Nan GUO Shu-xiang et al A novel force feedback interventional surgery robotic system
[C]//2015 IEEE International Conference on Mechatronics and Automation (ICMA) , Beijing, Aug . 2 -5 , 2015 .
[本文引用: 1]
[23]
WANG Kun-dong LU Qing-sheng CHEN Bin et al Endovascular intervention robot with multi-manipulators for surgical procedures: dexterity, adaptability, and practicability
[J]. Robotics and Computer-Integrated Manufacturing , 2019 , 56 : 75 -84 .
[本文引用: 1]
[24]
GUO Jian JIN Xiao-liang GUO Shu-xiang et al A vascular interventional surgical robotic system based on force-visual feedback
[J]. IEEE Sensors Journal , 2019 , 19 (23 ): 11081 -11089 .
[本文引用: 1]
[25]
WANG Hong-bo CHANG Jing-yuan YU Hao-yang et al Research on a novel vascular interventional surgery robot and control method based on precise delivery
[J]. IEEE Access , 2021 , 9 : 26568 -26582 .
[本文引用: 1]
[26]
GUO Jian JIN Xiao-liang GUO Shu-xiang et al Study on the tracking performance of the vascular interventional surgical robotic system based on the fuzzy-PID controller
[C]//2017 IEEE International Conference on Mechatronics and Automation (ICMA) , Takamatsu, Aug . 6 -9 , 2017 .
[本文引用: 1]
[27]
GUO Shu-xiang GUO Yang-ming BAO Xian-qiang et al A PID-type fuzzy logic controller for an interventional surgical robot
[C]//2019 IEEE International Conference on Mechatronics and Automation (ICMA) , Tianjin, Aug . 4 -7 , 2019 .
[本文引用: 1]
[28]
姜明明 微创血管介入手术机器人系统远端主从控制研究
[D].沈阳 :沈阳工业大学 ,2014 :26 -27 .
[本文引用: 1]
JIANG Ming-ming Research on remote master-slave control of minimally invasive vascular interventional surgery robot system
[D]. Shenyang : Shenyang University of Technology , 2014 : 26 -27 .
[本文引用: 1]
[29]
彭维礼 心脑血管主从介入手术机器人系统的从端力反馈控制研究
[D].北京 :北京理工大学 ,2016 :35 -37 .
[本文引用: 1]
PENG Wei-li Research on slave-end force feedback control of cardiovascular and cerebrovascular master-slave interventional robotic system
[D]. Beijing : Beijing Institute of Technology , 2016 : 35 -37 .
[本文引用: 1]
Surgical and interventional robotics: core concepts, technology, and design
1
2008
... 血管介入手术在多种外科手术中得到广泛应用,如心血管外科手术等,被认为是当前最具有应用价值的临床治疗手段之一[1 ] .但是血管介入手术也存在相对明显的弊端,例如医生必须穿上厚重的铅衣,以保护自身免受辐射影响.不过这只能减少50%左右的辐射暴露,仍会对介入医生造成严重的职业危害[2 -4 ] .为了保护介入医生免受透视辐射引起的潜在危害并尽量减小患者的辐射剂量,近几十年来,许多研究者一直致力于开发机器人系统,旨在精确地引导和定位用于基于导管的介入手术的介入工具,例如导丝、微导管、球囊和支架.这些血管介入手术机器人系统通常采用主从控制方式,可以缩短手术时间并减少患者对造影剂和辐射的暴露,同时可实现介入医生通过辐射防护罩后面的远程控制台进行手术[5 ] ,远离X射线的伤害.在机器人的帮助下,专家、医生等可以远程对患者进行及时诊断和治疗,最大限度地提高患者的生存率[6 ] . ...
Occupational radiation exposure in vascular interventional radiology: a complete evaluation of different body regions
1
2016
... 血管介入手术在多种外科手术中得到广泛应用,如心血管外科手术等,被认为是当前最具有应用价值的临床治疗手段之一[1 ] .但是血管介入手术也存在相对明显的弊端,例如医生必须穿上厚重的铅衣,以保护自身免受辐射影响.不过这只能减少50%左右的辐射暴露,仍会对介入医生造成严重的职业危害[2 -4 ] .为了保护介入医生免受透视辐射引起的潜在危害并尽量减小患者的辐射剂量,近几十年来,许多研究者一直致力于开发机器人系统,旨在精确地引导和定位用于基于导管的介入手术的介入工具,例如导丝、微导管、球囊和支架.这些血管介入手术机器人系统通常采用主从控制方式,可以缩短手术时间并减少患者对造影剂和辐射的暴露,同时可实现介入医生通过辐射防护罩后面的远程控制台进行手术[5 ] ,远离X射线的伤害.在机器人的帮助下,专家、医生等可以远程对患者进行及时诊断和治疗,最大限度地提高患者的生存率[6 ] . ...
Occupational health risks in cardiac catheterization laboratory workers
0
2016
Prevalence of work-related musculoskeletal disorders among surgeons and interventionalists: a systematic review and meta-analysis
1
2018
... 血管介入手术在多种外科手术中得到广泛应用,如心血管外科手术等,被认为是当前最具有应用价值的临床治疗手段之一[1 ] .但是血管介入手术也存在相对明显的弊端,例如医生必须穿上厚重的铅衣,以保护自身免受辐射影响.不过这只能减少50%左右的辐射暴露,仍会对介入医生造成严重的职业危害[2 -4 ] .为了保护介入医生免受透视辐射引起的潜在危害并尽量减小患者的辐射剂量,近几十年来,许多研究者一直致力于开发机器人系统,旨在精确地引导和定位用于基于导管的介入手术的介入工具,例如导丝、微导管、球囊和支架.这些血管介入手术机器人系统通常采用主从控制方式,可以缩短手术时间并减少患者对造影剂和辐射的暴露,同时可实现介入医生通过辐射防护罩后面的远程控制台进行手术[5 ] ,远离X射线的伤害.在机器人的帮助下,专家、医生等可以远程对患者进行及时诊断和治疗,最大限度地提高患者的生存率[6 ] . ...
Current and emerging robot-assisted endovascular catheterization technologies: a review
1
2014
... 血管介入手术在多种外科手术中得到广泛应用,如心血管外科手术等,被认为是当前最具有应用价值的临床治疗手段之一[1 ] .但是血管介入手术也存在相对明显的弊端,例如医生必须穿上厚重的铅衣,以保护自身免受辐射影响.不过这只能减少50%左右的辐射暴露,仍会对介入医生造成严重的职业危害[2 -4 ] .为了保护介入医生免受透视辐射引起的潜在危害并尽量减小患者的辐射剂量,近几十年来,许多研究者一直致力于开发机器人系统,旨在精确地引导和定位用于基于导管的介入手术的介入工具,例如导丝、微导管、球囊和支架.这些血管介入手术机器人系统通常采用主从控制方式,可以缩短手术时间并减少患者对造影剂和辐射的暴露,同时可实现介入医生通过辐射防护罩后面的远程控制台进行手术[5 ] ,远离X射线的伤害.在机器人的帮助下,专家、医生等可以远程对患者进行及时诊断和治疗,最大限度地提高患者的生存率[6 ] . ...
Telesurgery system for intravascular neurosurgery
1
2000
... 血管介入手术在多种外科手术中得到广泛应用,如心血管外科手术等,被认为是当前最具有应用价值的临床治疗手段之一[1 ] .但是血管介入手术也存在相对明显的弊端,例如医生必须穿上厚重的铅衣,以保护自身免受辐射影响.不过这只能减少50%左右的辐射暴露,仍会对介入医生造成严重的职业危害[2 -4 ] .为了保护介入医生免受透视辐射引起的潜在危害并尽量减小患者的辐射剂量,近几十年来,许多研究者一直致力于开发机器人系统,旨在精确地引导和定位用于基于导管的介入手术的介入工具,例如导丝、微导管、球囊和支架.这些血管介入手术机器人系统通常采用主从控制方式,可以缩短手术时间并减少患者对造影剂和辐射的暴露,同时可实现介入医生通过辐射防护罩后面的远程控制台进行手术[5 ] ,远离X射线的伤害.在机器人的帮助下,专家、医生等可以远程对患者进行及时诊断和治疗,最大限度地提高患者的生存率[6 ] . ...
Current and future perspectives in robotic endovascular surgery
1
2018
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
First experience with a novel robotic remote catheter system: Amigo? mapping trial
0
2013
Robotic-assisted percutaneous coronary intervention
1
2017
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
New catheter driving method using linear stepping mechanism for intravascular neurosurgery
1
2002
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
Initial experience with a telerobotic system to remotely navigate and automatically reposition standard steerable EP catheters
1
2007
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
Design and performance evaluation of a remote catheter navigation system
1
2009
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
Design and fabrication of a robotic mechanism for remote steering and positioning of interventional devices
1
2010
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
A novel robotic catheter system with force and visual feedback for vascular interventional surgery
1
2012
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
Long distance tele-robotic-assisted percutaneous coronary intervention: a report of first-in-human experience
1
2019
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
Robotic-assisted intervention strategy to minimize air exposure during the procedure: a case report of myocardial infarction and COVID-19
1
2020
... 国外研究机构较早对血管介入手术机器人进行了分析,现已推出了一些商业化产品,如Magellan、CorPath GRX、R-one和Amigo等[7 -9 ] .日本名古屋大学的Arai等[10 ] 提出了一种用于血管内神经外科手术的线性步进机构(linear stepper mechanism, LSM).意大利博洛尼亚大学的Laura等[11 ] 开发了一种远程机器人系统,用于在心脏介入手术中将电生理导管送入人体.加拿大不列颠哥伦比亚大学的Thakur等[12 ] 开发了一种远程导管导航系统,其允许外科医生用真正的导管来操作手术室内的导管操纵器.美国纽约州立大学的Srimathveeravalli等[13 ] 开发了一种用于血管内遥控进入的机器人系统,并分析了人体运动.日本国立香川大学的Guo等[14 ] 提出了一种新型管道机器人控制系统,该系统采用主从控制模式,实现了远程操作.2019年,CorPath GRX完成了全球首个远程经皮冠状动脉介入手术[15 ] ,其在及时帮助患者的同时最大限度地避免了医患之间潜在的交叉感染,确保了医护人员的安全[16 ] . ...
Skeleton-based active catheter navigation
1
2009
... 国内一些研究机构也对血管介入手术机器人进行了研究.哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究.中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究.北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构.上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人.天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性. ...
Development of a novel robotic catheter system for endovascular minimally invasive surgery
1
2011
... 国内一些研究机构也对血管介入手术机器人进行了研究.哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究.中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究.北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构.上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人.天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性. ...
An image-based guidewire navigation method for robot-assisted intravascular interventions
1
3
... 国内一些研究机构也对血管介入手术机器人进行了研究.哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究.中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究.北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构.上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人.天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性. ...
Accuracy experimental study of the vascular interventional surgical robot propulsive mechanism
1
2011
... 国内一些研究机构也对血管介入手术机器人进行了研究.哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究.中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究.北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构.上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人.天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性. ...
An enhanced dual-finger robotic Hand for Catheter manipulating in vascular intervention: a preliminary study
1
2013
... 国内一些研究机构也对血管介入手术机器人进行了研究.哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究.中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究.北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构.上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人.天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性. ...
A novel force feedback interventional surgery robotic system
1
2015
... 国内一些研究机构也对血管介入手术机器人进行了研究.哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究.中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究.北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构.上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人.天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性. ...
Endovascular intervention robot with multi-manipulators for surgical procedures: dexterity, adaptability, and practicability
1
2019
... 国内一些研究机构也对血管介入手术机器人进行了研究.哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究.中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究.北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构.上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人.天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性. ...
A vascular interventional surgical robotic system based on force-visual feedback
1
2019
... 国内一些研究机构也对血管介入手术机器人进行了研究.哈尔滨工业大学的Fu等[17 -18 ] 专注于主动导管和导管输送装置的研究.中国科学院自动化研究所的Ji等[19 ] 和北京航空航天大学的Liu等[20 ] 、Bian等[21 ] 分别研制了针对心血管和脑血管的介入手术机器人,并进行了相关的机构设计与导航控制方法研究.北京工业大学的Peng等[22 ] 研制了可利用夹持和滑动平台递送导管的介入手术推进机构.上海交通大学的Wang等[23 ] 研发了一款多机械手的血管介入手术机器人.天津理工大学的Guo等[24 ] 开发了一个监控系统,用于提高血管介入手术机器人系统的安全性. ...
Research on a novel vascular interventional surgery robot and control method based on precise delivery
1
2021
... 从端装置的动态性能直接决定了血管介入手术机器人的精度和性能[25 ] ,因此须对其进行动力学分析.从端装置实现平移运动的结构主要包括电动滑台、移动底板和夹持装置等,其轴向平移的动力学模型如图9 所示. ...
Study on the tracking performance of the vascular interventional surgical robotic system based on the fuzzy-PID controller
1
2017
... 所设计的血管介入手术机器人系统中可能存在多个非线性的不确定因素,如机器人系统的摩擦力、血液的阻力以及导丝/导管与血管壁的摩擦力等,因此采用工业上常用的PID控制方法.随着计算机技术的发展和模糊控制技术的应用,操作人员将调整PID参数的经验作为知识库存入计算机,根据现场实际情况,计算机自动调整PID参数,即模糊PID控制器.该控制器将经典的PID控制与先进的模糊推理相结合,可实现系统的最优控制[26 ] . ...
A PID-type fuzzy logic controller for an interventional surgical robot
1
2019
... PID控制器是一种在工业控制应用中常见的反馈回路部件[27 ] .PID控制器将收集到的数据与参考值进行比较,然后将这个差值用于计算新的输入值,目的是让系统的数据达到或者保持为参考值.PID控制器可以根据历史数据和差值的变化率来调整输入值,使系统更加准确且稳定.常规PID控制器控制率的一般形式如下: ...
微创血管介入手术机器人系统远端主从控制研究
1
2014
... 根据专家的操作经验和工程技术人员的知识储备,建立了合适的模糊控制规则[28 ] ,如表3 所示. ...
微创血管介入手术机器人系统远端主从控制研究
1
2014
... 根据专家的操作经验和工程技术人员的知识储备,建立了合适的模糊控制规则[28 ] ,如表3 所示. ...
心脑血管主从介入手术机器人系统的从端力反馈控制研究
1
2016
... 为了验证血管介入手术机器人的径向夹紧力检测性能,开展径向夹紧力检测评估实验,实验装置如图22 所示.该实验装置由电动滑台、夹持装置、柔性压力传感器(DF9-40-2KG,精度等级为1%,能斯达,中国)、模数转换器(ADS1115,微雪,中国)、相机(REAL SENCE,D455,Intel,美国)、定滑轮和砝码等组成.从端装置水平放置,将导丝一端置于夹持装置中线处并夹紧,另一端与质量为血管受力安全阈值的砝码(0.385 N)固定连接[29 ] ,并通过定滑轮实现受力方向的改变. ...
心脑血管主从介入手术机器人系统的从端力反馈控制研究
1
2016
... 为了验证血管介入手术机器人的径向夹紧力检测性能,开展径向夹紧力检测评估实验,实验装置如图22 所示.该实验装置由电动滑台、夹持装置、柔性压力传感器(DF9-40-2KG,精度等级为1%,能斯达,中国)、模数转换器(ADS1115,微雪,中国)、相机(REAL SENCE,D455,Intel,美国)、定滑轮和砝码等组成.从端装置水平放置,将导丝一端置于夹持装置中线处并夹紧,另一端与质量为血管受力安全阈值的砝码(0.385 N)固定连接[29 ] ,并通过定滑轮实现受力方向的改变. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}