一种具有力检测机制的新型血管介入手术机器人
A novel vascular interventional surgery robot with force detection mechanism
一种具有力检测机制的新型血管介入手术机器人 |
| 陈翼楠,蒲志新,郑珍妮 |
|
A novel vascular interventional surgery robot with force detection mechanism |
| Yi-nan CHEN,Zhi-xin PU,Zhen-ni ZHENG |
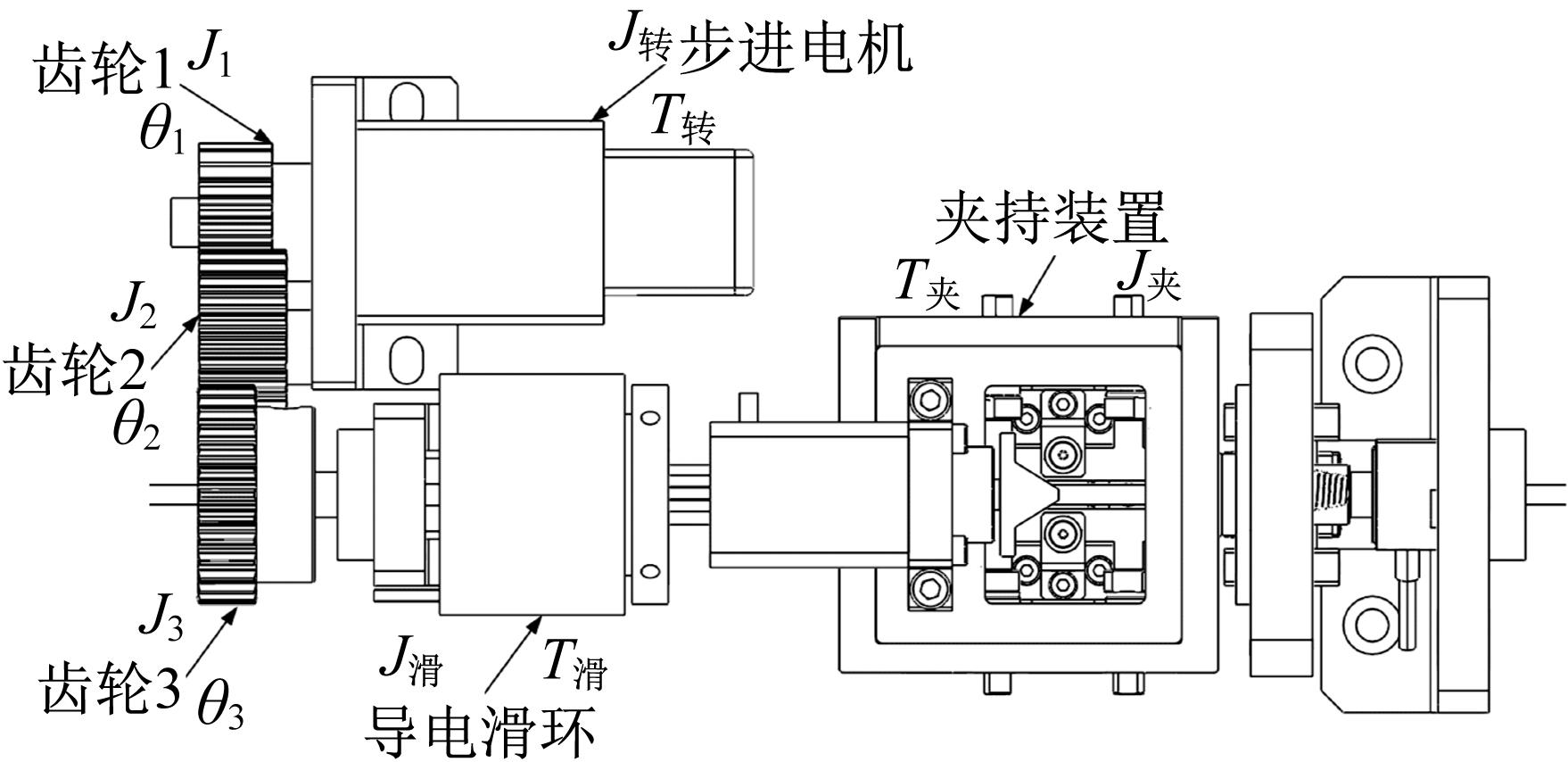
| 图10 从端装置径向旋转的动力学模型 |
| Fig.10 Dynamics model of radial rotation of slave device |
|
|