在现代工业中,冶金工业机器人扮演着十分重要的角色。其中,双臂机器人具有良好的协调互助操作优势,弥补了单臂机器人负载较低、可操作性较差以及无法形成闭合机构等缺陷,其目前已成为冶金工业机器人领域的研究热点之一[1 -3 ] 。控制技术会影响双臂机器人的系统性能,要提高其位置控制精度,就必须保证控制系统的稳定性。因此,采用稳定的控制方法实现高精度的运动控制具有非常重要的意义[4 -5 ] 。
传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制。但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型。为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建。刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题。然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究。对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果。例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性。另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] 。而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法。
鉴于机器人的动力学模型受各种复杂外界干扰的影响,为了更好地补偿其动力学模型中未知部分和外界扰动所产生的影响,以及提高其轨迹跟踪精度,笔者提出了一种基于模糊迭代Q-学习的控制算法,即将模糊迭代控制方法与Q-学习方法相结合。其中:模糊控制的万向逼近特性可对动力学模型中的未知惯性参数进行估计,而模糊控制的调节因子可由Q-学习控制器得到。最后,将所提出的控制算法应用于6-DOF双臂机器人,并联合ADAMS和MATLAB软件开展机器人轴孔装配仿真实验。
1 模糊Q -学习控制器
1.1 模糊控制器介绍
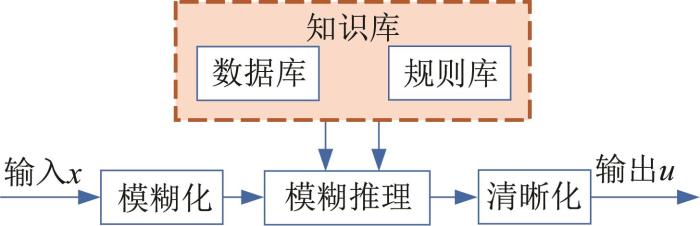
模糊控制器包括模糊化、知识库(含数据库和规则库)、模糊推理和清晰化等4个部分[18 -19 ] ,其结构框图如图1 所示。
图1
图1
模糊控制器结构框图
Fig.1
Structure block diagram of fuzzy controller
在整个模糊控制系统中,模糊控制器是最核心的部分,其最主要的任务是通过编写模糊规则和近似推理来得到最终的输出结果。这一过程本质上就是对模糊集合进行数学计算的过程,起始输入量x 到最后输出量u 在模糊控制器中会经历先从清晰到模糊,再从模糊到清晰的双向变化过程,以便得到更加符合实际需要的控制效果。
1.2 模糊Q -学习控制器结构设计
在大多数情况下,经过模糊处理的输出结果 U
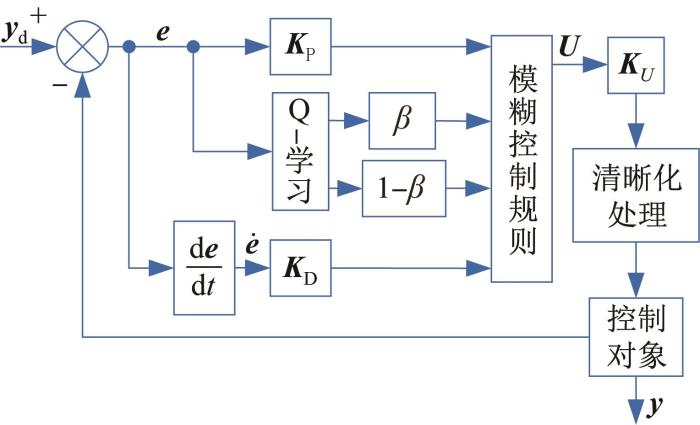
U = β e + ( 1 - β ) e ˙ ? ? ??? ( 0 < β < 1 ) (1)
式中:e e ˙ β
Q-学习算法是一种新颖的无模型强化学习方法,可以和模糊控制方法相结合,用于获取模糊控制中的调节因子β e e β
模糊Q-学习控制器的结构如图2 所示。图中:y d y K P 、 K D 分别表示误差和误差变化率的增益矩阵,K U 图2 所示为二维模糊控制器,其是目前模糊控制系统中应用最多的一类模糊控制器。
图2
图2
模糊Q-学习控制器结构
Fig.2
Structure of fuzzy Q-learning controller
在本文所设计的模糊Q-学习控制器中,奖励函数R 取:
R = ( e * - e ) 2 (2)
式(2)所示的奖励函数满足:当 e 0 越大时,得到的奖励越小;当 e 0 越小时,得到的奖励越大。
2 模糊迭代Q- 学习控制器设计
2.1 迭代学习控制基本原理
通常情况下,机械臂的轨迹跟踪误差e k ( t )
e k ( t ) = y d ( t ) - y k ( t ) (3)
为实现机械臂的高精度轨迹跟踪,引入闭环迭代学习控制算法,使得误差e k ( t )
u k + 1 ( t ) = L u k ( t ) , ?? e k + 1 ( t ) (4)
式中:L u k ( t ) u k + 1 ( t ) k k +1次迭代的输入变量。
u k + 1 ( t ) = u k ( t ) + K P e k + 1 ( t ) + K D e ˙ k + 1 ( t ) (5)
在整个控制系统的运行过程中,增益矩阵K P 和 K D
2.2 模糊迭代Q- 学习控制器结构设计
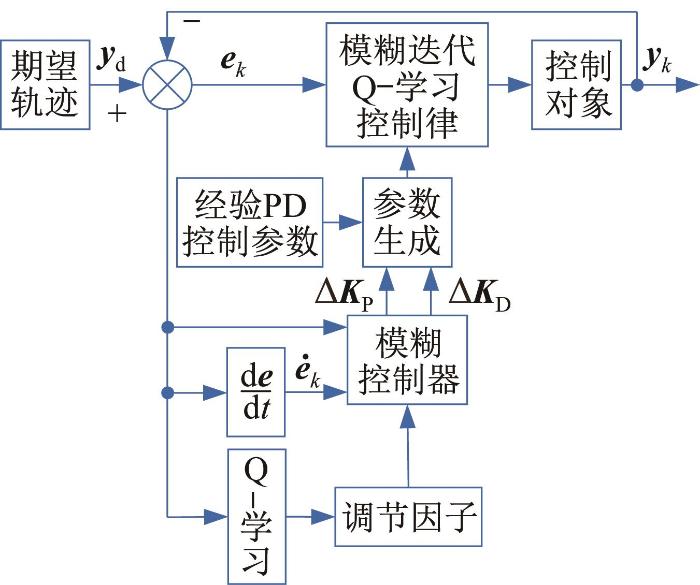
基于上述原理,设计模糊迭代Q-学习控制器,其结构如图3 所示。将基于迭代学习控制产生的误差e k e ˙ k Δ K P Δ K D K P K D
图3
图3
模糊迭代Q-学习控制器结构
Fig.3
Structure of fuzzy iterative Q-learning controller
K P = Δ K P + K P I K D = Δ K D + K D I
2.3 模糊迭代Q- 学习控制器收敛性验证
针对具有n 个关节的机械臂,其动力学模型可表示为[20 ] :
M ( q ) q ¨ + C ( q , ? q ˙ ) q ˙ + G ( q ) + F ( q ˙ ) + τ d = τ (6)
式中:M ( q ) C ( q , q ˙ ) G ( q ) F ( q ˙ ) τ d τ q 、 q ˙ 、 q ¨
令x 1 = q x 2 = q ˙ u = τ
x ˙ 1 = x 2 x ˙ 2 = M - 1 ( x 1 ) u - C ( x 1 , ? x 2 ) x 2 - G ( x 1 ) (7)
再令X = x 1 ?? x 2 T y = X 式(7)可以转化为:
X ˙ = x 2 - M - 1 ( x 1 ) u - C ( x 1 , ? x 2 ) x 2 + G ( x 1 ) + 0 M - 1 ( x 1 ) u y = X (8)
x ˙ ( t ) = A ( t ) x ( t ) + B ( t ) u ( t ) y ( t ) = C ( t ) x (9)
条件1:I - C ( t ) B ( t ) Γ ( t ) ≤ ρ ˉ < 1 I Γ ( t ) ρ ˉ
条件2:迭代初始条件保持一致,即x k ( 0 ) = x 0 k = 1,2 , 3 , ? y 0 ( 0 ) = y d ( 0 ) k → ∞ y k ( t ) → y d ( t ) ? t ∈ [ 0 , T ]
y k + 1 ( 0 ) = C x k + 1 ( 0 ) = C x k ( 0 ) = y k ( 0 ) ?????? (10)
则可得e k ( 0 ) = 0 ( k = 1,2 , 3 , ? )
方程x ˙ ( t ) = A ( t ) x ( t ) + B ( t ) u ( t )
x ( t ) = C e x p ( A ( t ) ) + ∫ 0 t e x p A ( t - τ ) B ( τ ) u ( τ ) d τ (11)
x k ( t ) - x k + 1 ( t ) = ∫ 0 t Φ ( t , ? τ ) B ( τ ) u k ( τ ) - u k + 1 ( τ ) d τ (12)
e k ( t ) = y d ( t ) - y k ( t ) e k + 1 ( t ) = y d ( t ) - y k + 1 ( t ) (13)
e k ( t ) - e k + 1 ( t ) = y k ( t ) - y k + 1 ( t ) = ??????????????????????????????????? C ( t ) x k ( t ) - x k + 1 ( t ) = ?????????????????????????????????? ∫ 0 t C ( t ) Φ ( t , ? τ ) B ( τ ) ?????????????????????????????????? u k ( τ ) - u k + 1 ( τ ) d τ (14)
结合式(5)和式(14),可得到第k + 1
e k + 1 ( t ) ? = e k ( t ) - ∫ 0 t C ( t ) Φ ( t , ? τ ) B ( τ ) ??????????????????? u k ( τ ) - u k + 1 ( τ ) d τ = ??????????????????? e k ( t ) - ∫ 0 t C ( t ) Φ ( t , ? τ ) B τ ??????????????????? K P ( τ ) e k ( τ ) + K D ( τ ) e ˙ k ( τ ) d τ (15)
根据分部积分的方式,令G ( t , τ ) = C ( t ) B ( τ ) K D ( τ )
∫ 0 t C ( t ) B ( τ ) K D ( τ ) e ˙ k ( τ ) d τ = G ( t , ? τ ) e ˙ k ( τ ) | 0 t - ???????? ∫ 0 t ? ? τ ? ? G ( t , ? τ ) e k ( τ ) d τ (16)
e k + 1 ( t ) = I - C ( t ) B ( t ) K D ( t ) e k ( t ) + ???????????????????? ∫ 0 t ? ? τ ? ? G ( t , ? τ ) e k ( τ ) d τ - ???????????????????? ∫ 0 t C ( t ) Φ ( t , ? τ ) B ( τ ) K D ( τ ) e k ( τ ) d τ (17)
e k + 1 ( t ) ≤ I - C ( t ) B ( t ) K D ( t ) e k ( t ) + ???????????????????????? ∫ 0 t b 1 e k ( τ ) d τ (18)
b 1 = m a x s u p t , τ ∈ 0 , T ? ? τ G ( t , τ ) , ???????? s u p t , τ ∈ 0 , T C ( t ) Φ ( t , τ ) B ( τ ) K P ( τ )
式(18)两边同时乘e x p ( - λ t ) λ > 0 ∫ 0 t e x p ( λ t ) ? ? d τ = e x p ( λ t ) - 1 λ
e x p ( - λ t ) ∫ 0 t b 1 e k ( τ ) d τ = ???????? e x p ( - λ t ) ∫ 0 t b 1 e k ( τ ) e x p ( - λ t ) e x p ( λ t ) d τ ≤ ???????? b 1 e x p ( - λ t ) e k ( τ ) λ e x p ( λ t ) - 1 λ ≤ ???????? b 1 1 - e x p ( - λ T ) λ e k ( τ ) λ ???? (19)
e x p ( - λ t ) ∫ 0 t ∫ 0 τ b 2 e k ( σ ) d σ d τ ≤ ???????? b 2 1 - e x p ( - λ T ) λ 2 e k ( τ ) λ (20)
式中:b 2 = s u p t , τ ∈ 0 , T C ( t ) Φ ( t , τ ) B ( τ ) K D ( τ )
e k + 1 λ ≤ ρ ? e k λ (21)
式中:ρ ? = ρ ˉ + b 1 1 - e x p ( - λ T ) λ + b 2 1 - e x p ( - λ T ) λ 2 ρ ˉ < 1 λ ρ ? < 1 l i m k → ∞ e k λ = 0 λ
3 双臂机器人的联合仿真实验
3.1 基于ADAMS 和MATLAB 的联合仿真平台搭建
为了验证本文所提出的模糊迭代Q-学习控制算法的有效性与优越性,在ADAMS和MATLAB软件中进行联合仿真实验。以6-DOF双臂机器人为研究对象,先在SolidWorks软件中绘制其三维模型。该机器人的左右机械臂各有6个自由度,且左右机械臂构型对称。采用改进的D-H法建立连杆坐标系(以左机械臂为例),从基座到末端执行器的关节分别定义为1~6,具体参数如表1 所示。其中:θi 、αi -1 、di 、ai -1 分别表示关节转角、连杆扭角、连杆偏距和连杆杆长。
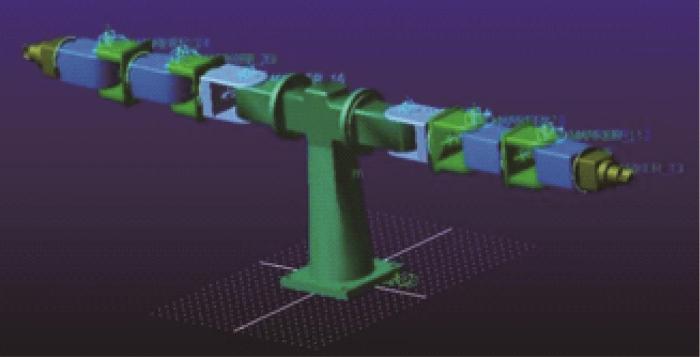
然后,将构建好的6-DOF双臂机器人三维模型文件另保存为Parasolid格式,然后导入ADAMS软件以构建其仿真模型,如图4 所示。
图4
图4
6-DOF双臂机器人仿真模型
Fig.4
Simulation model of 6-DOF dual-arm robot
在ADAMS软件中对6-DOF双臂机器人仿真模型进行设置,并通过信息选项获取机器人每个零部件的质心坐标及惯性参数。以左机械臂为例,其各个关节的动力学参数如表2 所示。
接着,点击ADAMS软件中的单元建立状态变量,对6-DOF双臂机器人左右机械臂的状态变量进行设置,依次为各关节的角度、角速度以及力矩。
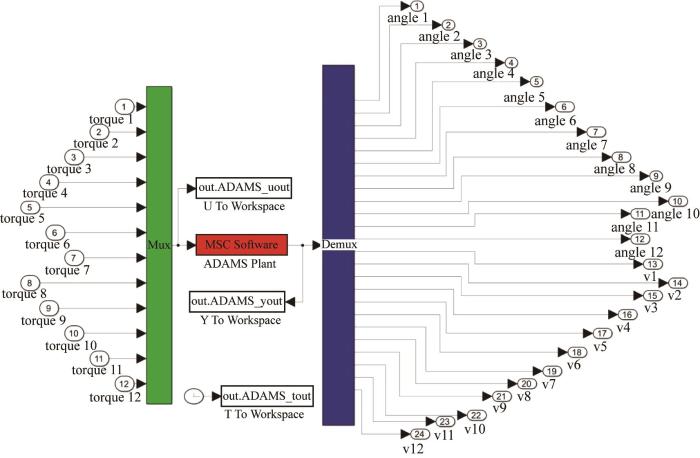
最后,利用ADAMS软件中的controls插件对机械臂控制系统的输入、输出进行设置:输入变量为力矩,输出变量为角度和角速度;目标软件设为MATLAB;ADAMS solver选项为非线性,求解器设为FORTRAN。
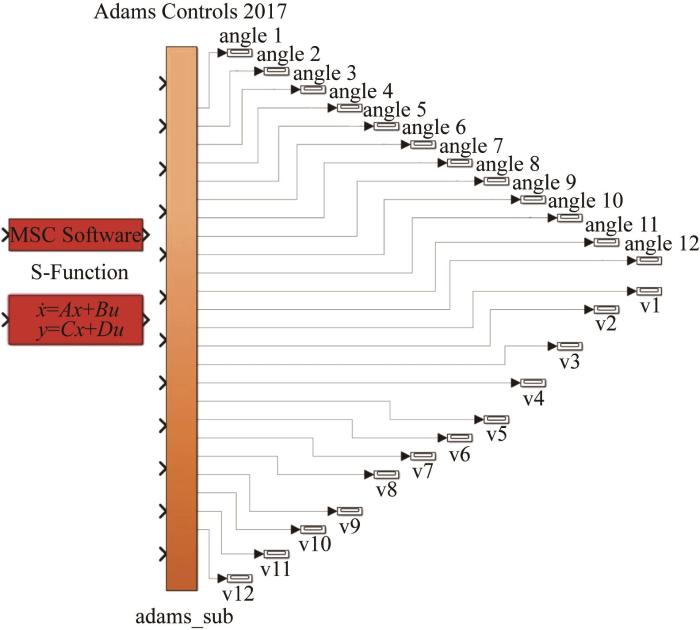
图5 所示为机械臂控制子系统模块,需要对ADAMS_sub中的ADAMS Plant模块进行Simulink和ADAMS同步仿真参数设置,如图6 所示,并在Interprocess option选项中选择PIPE(DDE),在Animation mode中选择interactive。完成设定后,可在运行Simulink时使ADAMS同步仿真。
图5
图5
机械臂控制子系统模块
Fig.5
Mechanical arm control subsystem module
图6
图6
机械臂控制子系统模块输入和输出变量设置
Fig.6
Input and output variable setting of mechanical arm control subsystem module
3.2 双臂机器人轨迹跟踪控制仿真实验
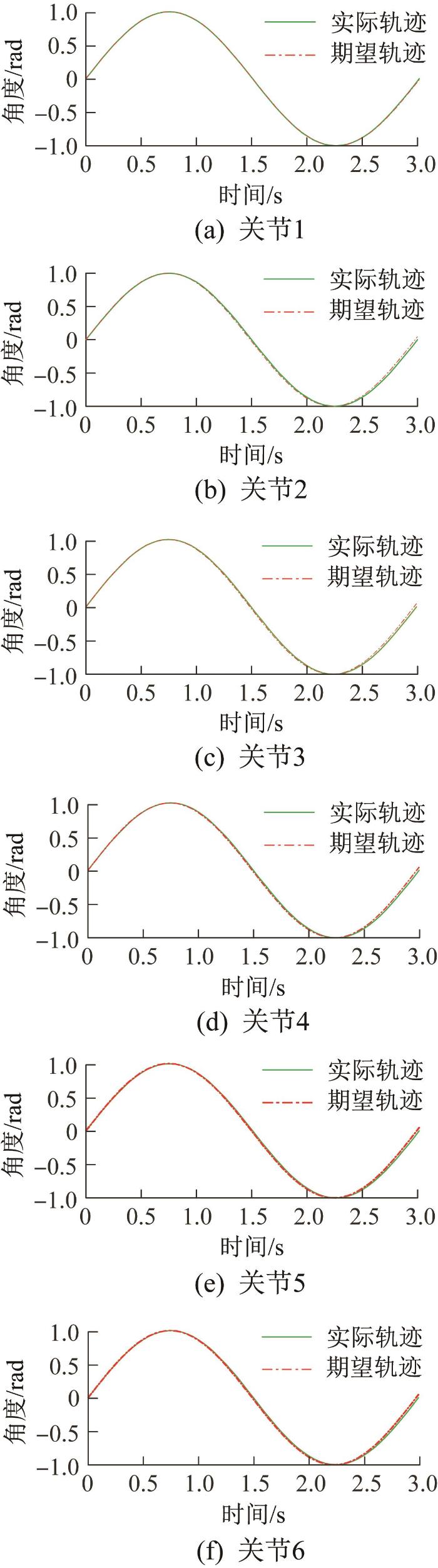
设置6-DOF双臂机器人轨迹跟踪控制仿真总时长为3 s,迭代次数为20。以左机械臂为例,设期望轨迹为正弦曲线,其6个关节的轨迹跟踪结果如图7 所示。由图可以看到,各个关节的实际轨迹跟踪效果较好,跟踪精度较高,验证了所提出模糊迭代Q-学习控制算法的有效性和优越性。
图7
图7
左机械臂各关节的轨迹跟踪结果
Fig.7
Trajectory tracking results of each joint of left mechanical arm
3.3 双臂机器人轴孔装配仿真实验
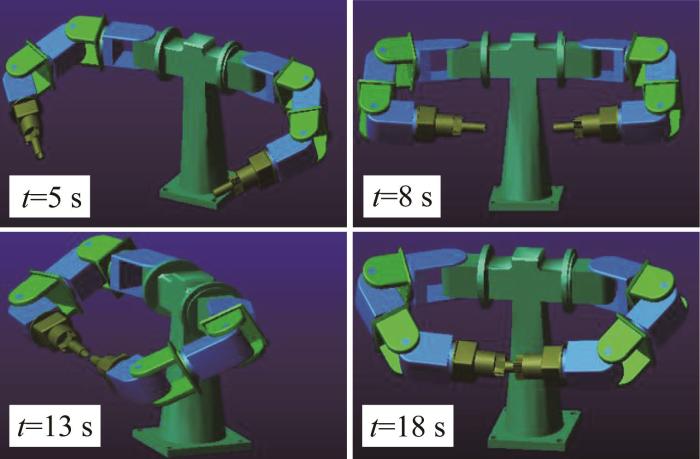
在控制6-DOF双臂机器人进行轴孔装配之前,假定其左右机械臂的末端执行器已经分别夹持了轴和孔,故只需考虑双臂末端的轴孔装配路径。鉴于在轴孔装配实验中左右机械臂作对称运动,仅分析单机械臂的关节运动即可。图8 所示为6-DOF双臂机器人的轴孔装配过程。
图8
图8
6-DOF双臂机器人的轴孔装配过程
Fig.8
Shaft hole assembly process of 6-DOF dual-arm robot
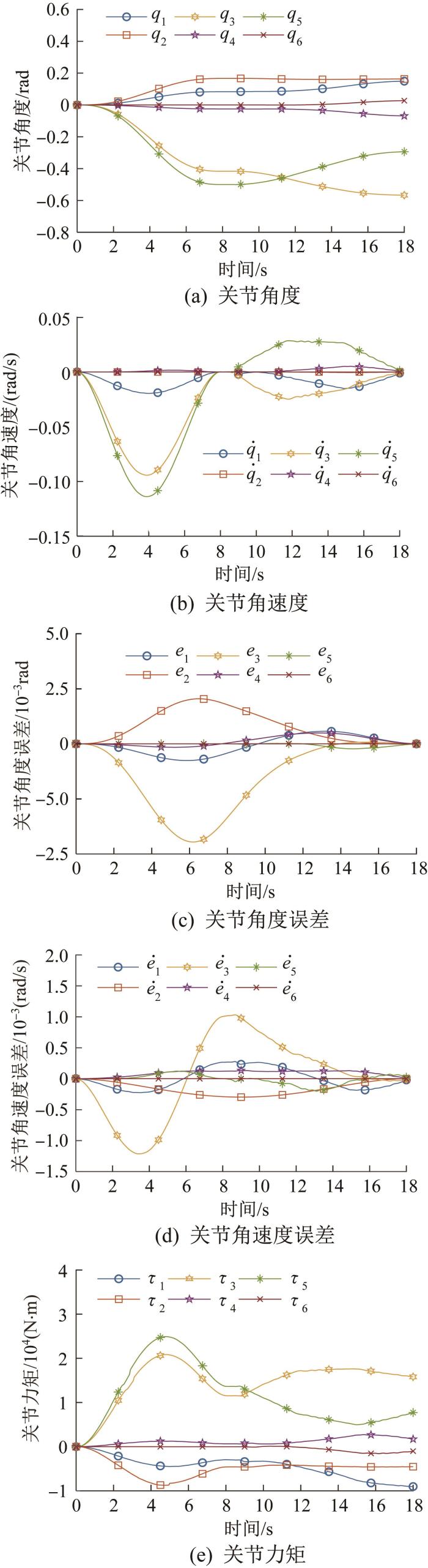
由图8 可知,6-DOF双臂机器人的轴孔装配成功,验证了所提出控制算法的正确性。利用MATLAB软件的仿真数据以及与ADAMS软件联合仿真得到的数据,对左机械臂各关节的角度和角速度等进行分析,结果如图9 所示。
图9
图9
轴孔装配过程中左机械臂各关节的动力学特性
Fig.9
Dynamic characteristics of each joint of left mechanical arm during shaft hole assembly
观察图9 (a)和图9 (c)可知,左机械臂各关节的角度变化平缓且无突然波动的情况,关节角度的最大误差约为0.004 rad,关节角速度的最大误差约为0.001 5 rad/s。此外,由于轴孔装配过程分为2个阶段,2个阶段之间稍有停顿,故在t =8 s附近,关节角度和角速度出现了短暂为零的情况。图9 (e)所示的左机械臂输入力矩变化曲线整体较为平滑,未出现力矩抖振现象,说明该机械臂的整体运动效果较好,进一步验证了所提出的模糊迭代Q-学习控制算法的有效性和稳定性。
4 结 论
1)针对冶金工业机器人控制不稳定、轨迹跟踪精度较低和自适应性较差的问题,提出了一种模糊迭代Q-学习控制算法。
2)联合ADAMS和MATLAB软件搭建6-DOF双臂机器人仿真模型,并以正弦曲线作为期望轨迹进行轨迹跟踪仿真分析。结果表明,该机器人各关节的轨迹跟踪效果较好,实现了关节空间内的低误差轨迹跟踪。
3)6-DOF双臂机器人的轴孔装配仿真结果表明,各关节角度的误差不超过0.004 rad,角速度误差不超过0.001 5 rad/s,且各关节的角度变化曲线和输入力矩变化曲线平稳光滑,无剧烈抖振和突变现象,验证了所提出模糊迭代Q-学习控制算法在冶金工业机器人轨迹跟踪控制中的有效性和优越性。
参考文献
View Option
[1]
ZHANG Zhi-jun LI Zhi-jun ZHANG Yu-nong et al Neural-dynamic-method-based dual-arm CMG scheme with time-varying constraints applied to humanoid robots
[J]. IEEE Transactions on Neural Networks and Learning Systems , 2015 , 26 (12 ): 3251 -3262 . doi:10.1109/TNNLS. 2015.2469147
[本文引用: 1]
[2]
DUAN Jin-jun GAN Ya-hui DAI Xian-zhong The hybrid position/force control based on variable impedance model in the dual-arm coordinated transport
[J]. Robot , 2019 , 41 (6 ): 795 -802 , 812 .
DOI:10.13973/j.cnki.robot.180705
[3]
[本文引用: 1]
ZHANG Jian-hua XU Xiao-lin LIU Xuan et al Relative dynamic modeling of dual-arm coordination robot
[J]. Journal of Mechanical Engineering , 2019 , 55 (3 ): 34 -42 .
DOI:10.3901/jme.2019.03.034
[本文引用: 1]
[4]
[本文引用: 1]
LONG Zhang LI Xian-tao SHUAI Tao et al Review of research state of trajectory planning for industrial robots
[J]. Mechanical Science and Technology for Aerospace Engineering , 2021 , 40 (6 ): 853 -862 .
DOI:10.13433/j.cnki.1003-8728.20200132
[本文引用: 1]
[6]
ALESSANDRO D L BRUNO S LOREDANA Z PD control with on-line gravity compensation for robots with elastic joints: theory and experiments
[J]. Automatica , 2005 , 41 (10 ): 1809 -1819 . doi:10.1016/j.automatica.2005.05.009
[本文引用: 1]
[7]
FLORIAN P DOMINIC L WERNER F et al Dynamic trajectory generation for serial elastic actuated robots
[J]. IFAC Proceedings Volumes , 2012 , 45 (22 ): 636 -643 . doi:10.3182/20120905-3-HR-2030.00159
[本文引用: 1]
[9]
[本文引用: 1]
LIU Xue-fei XU Xiang-rong ZHA Wen-bin et al A trajectory tracking algorithm of null space obstacle avoidance for end-effector of manipulators
[J]. Mechanical Science and Technology for Aerospace Engineering , 2021 , 40 (7 ): 1009 -1015 .
DOI:10.13433/j.cnki.1003-8728.20200457
[本文引用: 1]
[10]
ZHONG Yu-guang YANG Fan Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators
[J]. Ocean Engineering , 2019 , 187 (9 ): 1 -11 . doi:10.1016/j.oceaneng.2019.106202
[本文引用: 1]
[11]
Ji-chang LO LIN Cheng-wei Polynomial fuzzy observed-state feedback stabilization via homogeneous Lyapunov methods
[J]. IEEE Transactions Fuzzy Systems , 2018 , 26 (5 ): 2873 -2885 . doi:10.1109/TFUZZ.2017.2786211
[本文引用: 1]
[12]
[本文引用: 1]
LI De-yun XU De-gang GUI Wei-hua Coordinated impedance control for dual-arm robots based on time delay estimation and adaptive fuzzy sliding mode controller
[J]. Control and Decision , 2021 , 36 (6 ): 1311 -1323 .
DOI:10.13195/j.kzyjc.2019.1701
[本文引用: 1]
[13]
CHEN Yu-jen JU Ming-yu HWANG Kao-Shing A virtual torque-based approach to kinematic control of redundant manipulators
[J]. IEEE Transactions on Industrial Electronics , 2017 , 64 (2 ): 1728 -1736 . doi:10.1109/TIE.2016.2548439
[本文引用: 1]
[14]
ZHA Wen-bin XU Xiang-rong CHEN Zhao-xing et al Manipulator tracking algorithm based on estimated dynamics and time-varying output constraint state
[C]// 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics(ICARM) , Chongqing, Jul . 3 -5 , 2021 . doi:10.1109/ICARM52023.2021.9536170
[15]
[本文引用: 1]
DUAN Shu-yong LI Chang-luo HAN Xu et al Forward-inverse dynamics analysis of robot arm trajectories and development of a nonlinear friction model for robot joints
[J]. Journal of Mechanical Engineering , 2020 , 56 (9 ): 18 -28 .
DOI:10.3901/JME.2020.09.018
[本文引用: 1]
[17]
ANDREA M Z ANDREA C LUIGI P et al Prediction of human activity patterns for human-robot collaborative assembly tasks
[J]. IEEE Transactions on Industrial Informatics , 2019 , 15 (7 ): 3934 -3942 . doi:10.1109/TII. 2018.2882741
[本文引用: 1]
[20]
REN Yi CHEN Zheng-sheng LIU Ye-chao et al Adaptive hybrid position/force control of dual-arm cooperative manipulators with uncertain dynamics and closed-chain kinematics
[J]. Journal of the Franklin Institute , 2017 , 354 (17 ): 7767 -7793 . doi:10.1016/j.jfranklin.2017.09.015
[本文引用: 1]
Neural-dynamic-method-based dual-arm CMG scheme with time-varying constraints applied to humanoid robots
1
2015
... 在现代工业中,冶金工业机器人扮演着十分重要的角色.其中,双臂机器人具有良好的协调互助操作优势,弥补了单臂机器人负载较低、可操作性较差以及无法形成闭合机构等缺陷,其目前已成为冶金工业机器人领域的研究热点之一[1 -3 ] .控制技术会影响双臂机器人的系统性能,要提高其位置控制精度,就必须保证控制系统的稳定性.因此,采用稳定的控制方法实现高精度的运动控制具有非常重要的意义[4 -5 ] . ...
双臂协调搬运过程中基于变阻抗模型的位置/力混合控制
0
2019
双臂协调搬运过程中基于变阻抗模型的位置/力混合控制
0
2019
双臂协调机器人相对动力学建模
1
2019
... 在现代工业中,冶金工业机器人扮演着十分重要的角色.其中,双臂机器人具有良好的协调互助操作优势,弥补了单臂机器人负载较低、可操作性较差以及无法形成闭合机构等缺陷,其目前已成为冶金工业机器人领域的研究热点之一[1 -3 ] .控制技术会影响双臂机器人的系统性能,要提高其位置控制精度,就必须保证控制系统的稳定性.因此,采用稳定的控制方法实现高精度的运动控制具有非常重要的意义[4 -5 ] . ...
双臂协调机器人相对动力学建模
1
2019
... 在现代工业中,冶金工业机器人扮演着十分重要的角色.其中,双臂机器人具有良好的协调互助操作优势,弥补了单臂机器人负载较低、可操作性较差以及无法形成闭合机构等缺陷,其目前已成为冶金工业机器人领域的研究热点之一[1 -3 ] .控制技术会影响双臂机器人的系统性能,要提高其位置控制精度,就必须保证控制系统的稳定性.因此,采用稳定的控制方法实现高精度的运动控制具有非常重要的意义[4 -5 ] . ...
工业机器人轨迹规划研究现状综述
1
2021
... 在现代工业中,冶金工业机器人扮演着十分重要的角色.其中,双臂机器人具有良好的协调互助操作优势,弥补了单臂机器人负载较低、可操作性较差以及无法形成闭合机构等缺陷,其目前已成为冶金工业机器人领域的研究热点之一[1 -3 ] .控制技术会影响双臂机器人的系统性能,要提高其位置控制精度,就必须保证控制系统的稳定性.因此,采用稳定的控制方法实现高精度的运动控制具有非常重要的意义[4 -5 ] . ...
工业机器人轨迹规划研究现状综述
1
2021
... 在现代工业中,冶金工业机器人扮演着十分重要的角色.其中,双臂机器人具有良好的协调互助操作优势,弥补了单臂机器人负载较低、可操作性较差以及无法形成闭合机构等缺陷,其目前已成为冶金工业机器人领域的研究热点之一[1 -3 ] .控制技术会影响双臂机器人的系统性能,要提高其位置控制精度,就必须保证控制系统的稳定性.因此,采用稳定的控制方法实现高精度的运动控制具有非常重要的意义[4 -5 ] . ...
基于多传感器融合信息的移动机器人速度控制方法
1
2021
... 在现代工业中,冶金工业机器人扮演着十分重要的角色.其中,双臂机器人具有良好的协调互助操作优势,弥补了单臂机器人负载较低、可操作性较差以及无法形成闭合机构等缺陷,其目前已成为冶金工业机器人领域的研究热点之一[1 -3 ] .控制技术会影响双臂机器人的系统性能,要提高其位置控制精度,就必须保证控制系统的稳定性.因此,采用稳定的控制方法实现高精度的运动控制具有非常重要的意义[4 -5 ] . ...
基于多传感器融合信息的移动机器人速度控制方法
1
2021
... 在现代工业中,冶金工业机器人扮演着十分重要的角色.其中,双臂机器人具有良好的协调互助操作优势,弥补了单臂机器人负载较低、可操作性较差以及无法形成闭合机构等缺陷,其目前已成为冶金工业机器人领域的研究热点之一[1 -3 ] .控制技术会影响双臂机器人的系统性能,要提高其位置控制精度,就必须保证控制系统的稳定性.因此,采用稳定的控制方法实现高精度的运动控制具有非常重要的意义[4 -5 ] . ...
PD control with on-line gravity compensation for robots with elastic joints: theory and experiments
1
2005
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
Dynamic trajectory generation for serial elastic actuated robots
1
2012
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
6-DOF双臂机器人轨迹规划与动力学仿真
1
2020
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
6-DOF双臂机器人轨迹规划与动力学仿真
1
2020
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
一种零空间避障的机械臂末端轨迹跟踪算法
1
2021
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
一种零空间避障的机械臂末端轨迹跟踪算法
1
2021
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators
1
2019
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
Polynomial fuzzy observed-state feedback stabilization via homogeneous Lyapunov methods
1
2018
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
基于时间延时估计和自适应模糊滑模控制器的双机械臂协同阻抗控制
1
2021
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
基于时间延时估计和自适应模糊滑模控制器的双机械臂协同阻抗控制
1
2021
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
A virtual torque-based approach to kinematic control of redundant manipulators
1
2017
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
Manipulator tracking algorithm based on estimated dynamics and time-varying output constraint state
0
2021
机械臂动力学分析及关节非线性摩擦模型建立
1
2020
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
机械臂动力学分析及关节非线性摩擦模型建立
1
2020
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
迭代学习控制综述
1
2005
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
迭代学习控制综述
1
2005
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
Prediction of human activity patterns for human-robot collaborative assembly tasks
1
2019
... 传统的控制方法主要有基于精确数学模型的PID(proportional integral derivative,比例积分微分)控制.但是,多自由度双臂机器人是一种多输入、多输出且具有强耦合作用的复杂系统,具有非线性、时变不确定等特点[6 -7 ] ,难以建立精确的数学模型.为实现双臂机器人高精度的轨迹跟踪控制效果,朱永飞等[8 ] 基于ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)和MATLAB软件对6-DOF(six degree-of-freedom,六自由度)双臂机器人进行了联合仿真,采用B样条曲线插值方法完成了其轨迹规划任务,但该研究仅从运动轨迹规划方面展开,缺乏对机械臂控制器的设计和搭建.刘雪飞等[9 ] 实现了机械臂末端执行器在避障条件下的高精度位置跟踪,解决了非结构环境下机械臂的安全运动轨迹规划问题.然而,上述学者仅从运动学角度对双臂机器人的轨迹跟踪进行了研究,为进一步提高机器人轨迹跟踪的控制精度,不少学者从控制算法角度出发展开相关研究.对于数学模型不精确的复杂系统,在其控制策略中引入模糊控制[10 -11 ] ,即利用模糊控制对动力学模型中未知部分和扰动部分的非线性逼近特性,取得了良好的控制效果.例如:李德昀等[12 ] 将自适应模糊控制策略应用于双臂机器人的协同搬运作业,实现了平稳的力矩输出控制及精准的接触力控制,具有较强的鲁棒性和自适应性.另外,现阶段的机器人大多是按设定好的程序进行大量重复性操作,比如搬运物体、激光切割和定点抓取等,在外界环境干扰和本体磨损等因素的影响下,机器人的重复性操作准确性势必会下降[13 -15 ] .而迭代学习控制方法[16 -17 ] 非常适用于做重复性操作任务的机器人控制系统,且该控制方法所需的控制对象数学模型可以是不准确的,其是一种易于实现、鲁棒性强、轨迹跟踪效果较好的智能控制方法. ...
Direct adaptive fuzzy control of nonlinear strict-feedback systems
1
2009
... 模糊控制器包括模糊化、知识库(含数据库和规则库)、模糊推理和清晰化等4个部分[18 -19 ] ,其结构框图如图1 所示. ...
A survey on industrial applications of fuzzy control
1
2011
... 模糊控制器包括模糊化、知识库(含数据库和规则库)、模糊推理和清晰化等4个部分[18 -19 ] ,其结构框图如图1 所示. ...
Adaptive hybrid position/force control of dual-arm cooperative manipulators with uncertain dynamics and closed-chain kinematics
1
2017
... 针对具有n 个关节的机械臂,其动力学模型可表示为[20 ] : ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}