基于模糊迭代Q-学习的冶金工业机器人轨迹跟踪控制研究
Research on trajectory tracking control of metallurgical industrial robot based on fuzzy iterative Q-learning
基于模糊迭代Q-学习的冶金工业机器人轨迹跟踪控制研究 |
| 张卉,朱永飞,刘雪飞,徐向荣 |
|
Research on trajectory tracking control of metallurgical industrial robot based on fuzzy iterative Q-learning |
| Hui ZHANG,Yong-fei ZHU,Xue-fei LIU,Xiang-rong XU |
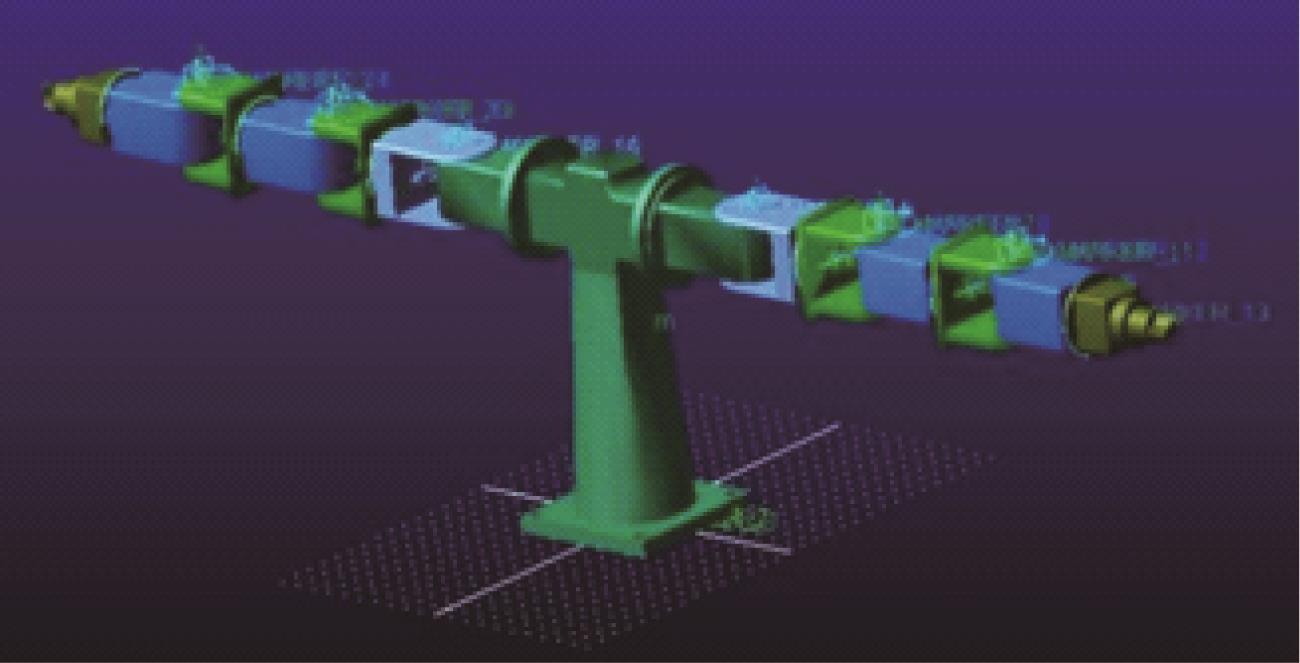
| 图4 6-DOF双臂机器人仿真模型 |
| Fig.4 Simulation model of 6-DOF dual-arm robot |
|
|