


随着微纳驱动、微机电控制驱动等技术的迅猛发展,高精度的微纳驱动定位平台[1-3]被广泛应用于微生物操作台、高精度加工台和光学快速反射镜等[4-8]。其中,压电陶瓷作为微纳驱动定位平台的核心部件,其输出位移不足几十微米,存在一定的局限性。随着对微位移放大机构性能要求的提高,有必要研制新型的微位移放大机构来对位移进行放大并传输[9-11]。基于柔性铰链的微位移放大机构能够产生较大的输出位移,因此受到了国内外学者的广泛关注[12-15]。倪迎雪等[16] 研究了一种新型混合柔性铰链的柔度,为该柔性铰链的设计和优化提供了理论依据。余跃庆等[17]设计了一种高精度的大变形柔性铰链,通过仿真和试验发现,用X形柔性铰链替代传统的刚性转动副可以较大程度地提高并联机器人的运动精度和综合性能。张法业等[18]将柔性铰链结构应用于光纤光栅加速度传感器,大大提高了传感器的横向抗扰能力和灵敏度。Choi等[19]基于直圆形柔性铰链设计和优化了一种对称式位移放大机构。根据红外光谱仪动镜支撑机构高精度、高带宽的要求[20],张明月等[21]采用平行簧片结构设计了一种动镜柔性支撑机构。Wang等[22]基于直圆形柔性铰链设计了一种三级混合式位移放大机构并应用于微夹钳,大大增大了微夹钳的夹持行程。
为了解决微位移放大机构铰链单一、位移放大倍数偏小等缺陷,同时为了满足压电驱动系统高精度、大行程的输出要求,笔者设计了一种三角混合两级杠杆微位移放大机构。首先,推导了微位移放大机构的位移放大公式和放大比;其次,对两级杠杆中支点铰链的类型进行仿真对比,分析直圆形、直梁形、直圆长形铰链对输入载荷的敏感性;然后,利用有限元分析软件进行微位移放大机构静力学和动力学仿真,将位移放大比的仿真值与理论值进行对比,来验证理论推导的正确性;最后,对微位移放大机构的相对寄生运动比和固定频率进行计算和仿真,来验证机构设计的合理性和有效性。
1 三角混合两级杠杆微位移放大机构的设计
1.1 机构的结构设计及工作原理
三角混合两级杠杆微位移放大机构的结构如图1所示。其主要由三角结构、两级杠杆结构、定位板、压电执行器和若干定位销组成。其中:2个三角结构左右对称分布,有利于提高位移放大倍数和输出应力;压电执行器放置在2个三角结构的正中间,其输出端紧紧贴合两侧三角结构的输入端。
图1
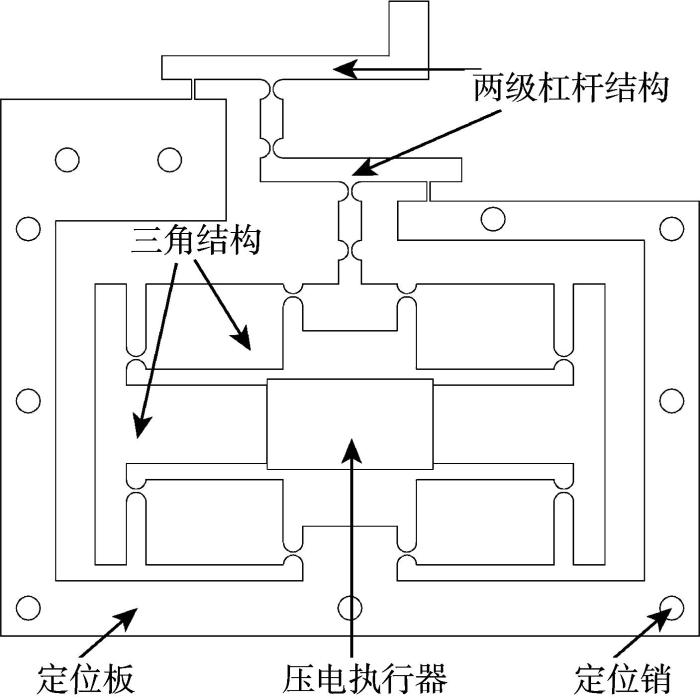
图1
三角混合两级杠杆微位移放大机构的结构
Fig.1
Structure of triangular hybrid two-stage lever micro-displacement amplification mechanism
机构的工作原理如图2所示。当压电执行器的输入位移
图2
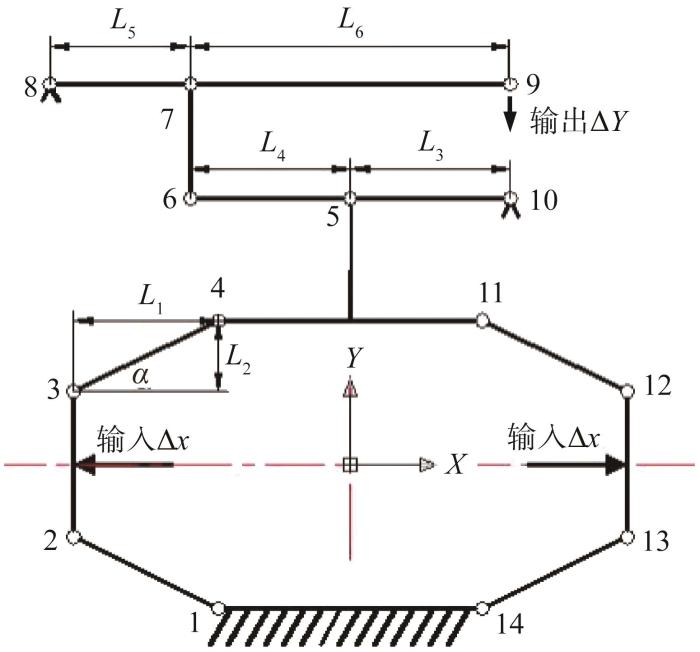
图2
三角混合两级杠杆微位移放大机构工作原理示意
Fig.2
Schematic of working principle of triangular hybrid two-stage lever micro-displacement amplification mechanism
一级杠杆的输入端与三角结构的输出端直接相连,大大减小了机构的能量损失和位移损失。机构的这种组合方式虽然不能保证去除非必要的寄生位移,但是可以在较小的结构尺寸下得到较大的位移放大比,将输入位移完成近似90°的转向放大。
1.2 机构参数分析
三角结构和两级杠杆结构的工作原理如图3所示。当压电执行器对三角结构对称输入2个大小相同、方向相反的水平位移
图3
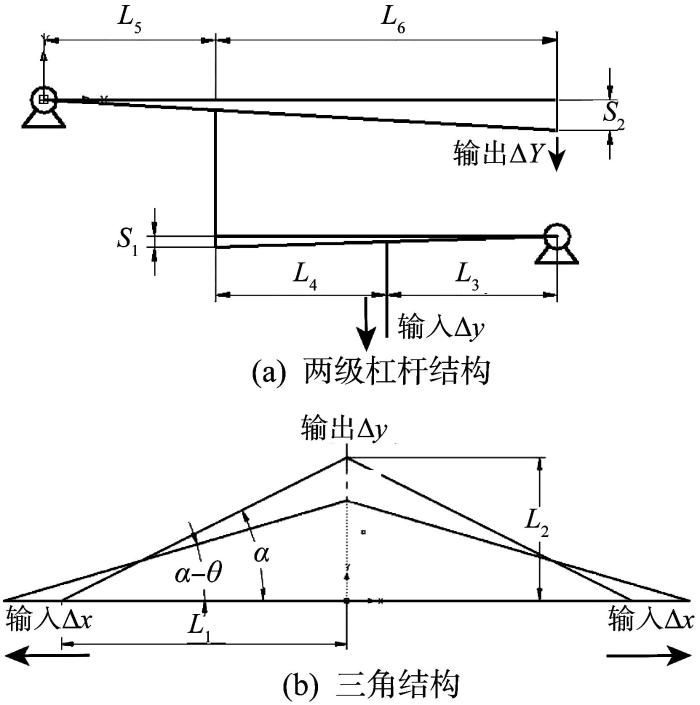
图3
三角结构和两级杠杆结构工作原理示意
Fig.3
Schematic of working principle of triangular structure and two-stage lever structure
由图3可知:
式中:L1为上部三角结构中2个铰链之间的横向距离,L2为上部三角结构中2个铰链之间的纵向距离;L为2个铰链之间的距离。
则三角结构的放大倍数
由于柔性铰链的弯曲变形较小,可以忽略铰链弯曲变形带来的位移变化,因此
又根据无穷小理论,低阶存在,高阶无意义,
所设计的三角结构沿中心线上下对称,且下部三角结构与固定板直接相连。根据叠加定理,可得三角结构的总放大比
针对两级杠杆结构,定义
式中:S1为一级杠杆的输出位移;S2为二级杠杆的输出位移。
因此,二级杠杆结构的放大倍数
同时,由于三角结构的输出端直接与两级杠杆结构的输入端相连,则微位移放大机构的总放大倍数K理为:
由图3可知:
所设计的三角混合两级杠杆微位移放大机构的结构参数如表1所示。其中:
表1 三角混合两级杠杆微位移放大机构的结构参数 (mm)
Table 1
| 参数 | t | R | d | L1 | L2 | L3 | L6 |
|---|---|---|---|---|---|---|---|
| 数值 | 0.4 | 1.25 | 2.5 | 20 | 8 | 10 | 20 |
将L1、L2的值代入
1.3 两级杠杆支点铰链的对比分析
表 2 三角混合两级杠杆微位移放大机构在不同输入载荷下最大应力、最大输出位移的有限元仿真结果
Table 2
| 输入载荷/MPa | 最大应力/MPa | 最大输出位移/um | ||||
|---|---|---|---|---|---|---|
| 直圆形铰链 | 直圆长形铰链 | 直梁形铰链 | 直圆形铰链 | 直圆长形铰链 | 直梁形铰链 | |
| 0.4 | 94.471 | 111.49 | 121.08 | 54.941 | 82.673 | 85.379 |
| 0.8 | 188.94 | 222.99 | 242.17 | 109.88 | 146.97 | 170.76 |
| 1.2 | 283.41 | 334.48 | 363.25 | 164.82 | 248.02 | 256.14 |
| 1.6 | 377.88 | 445.97 | 484.34 | 219.76 | 330.69 | 341.52 |
| 2.0 | 472.36 | 557.47 | 605.42 | 274.70 | 413.36 | 426.89 |
图4
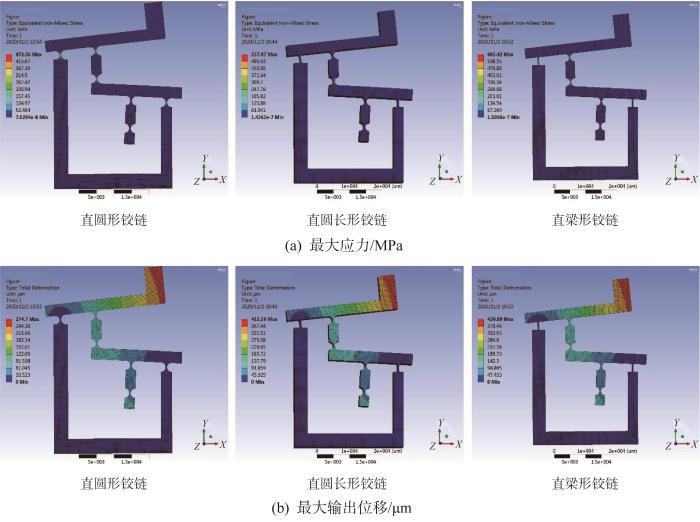
图4
输入载荷为2.0 MPa时三角混合两级杠杆微位移放大机构的最大应力和最大输出位移
Fig.4
Maximum stress and maximum output displacement of triangular hybrid two-stage lever micro-displacement amplification mechanism with input load of 20 MPa
由表2和图4可知:两级杠杆机构的最大应力均出现在铰链结构中厚度最小的中心处;同时,随着输入载荷的增大,支点铰链的类型会对机构的输出位移产生一定的影响。其中,采用直圆形铰链的机构在不同输入载荷下的最大应力和最大输出位移均是最小的,当输入载荷为2.0 MPa载荷时,其最大应力仅为472.36 MPa,而采用其他2种铰链的机构的最大应力也没有超过锰钢的屈服极限。采用直圆长形和直梁形铰链的机构的最大位移分别是采用直圆形铰链机构的1.505倍和1.554倍,说明在满足屈服极限的前提下,直圆长形和直梁形铰链对输入载荷的敏感性更强。此外,随着输入载荷的增大,各最大应力和最大输出位移之间的差值越来越大。为了得到最佳的位移放大效果,采用敏感性更强的直梁形铰链作为两级杠杆结构的支点铰链。
2 三角混合两级杠杆微位移放大机构的静力学和动力学仿真
2.1 静力学仿真
图5
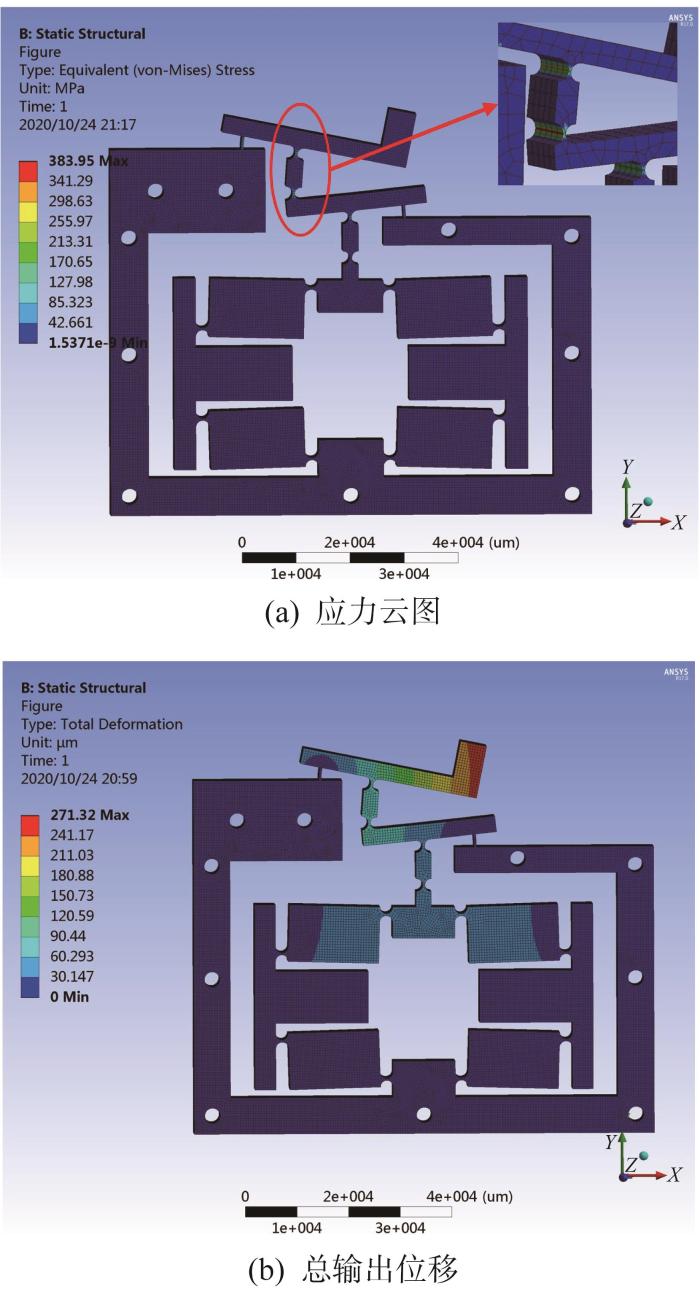
图5
Fig.5
Stress nephogram and total output displacement of triangular hybrid two-stage lever micro-displacement amplification mechanism when
由图5(a)可知,当输入位移为10 μm时,机构的最大应力出现在二级杠杆的支点铰链处,为383.95 MPa,且小于锰钢的屈服极限。因此,所设计的微位移放大机构在形变的过程中受到的应力不会超过屈服极限,不会发生断裂。同时可以看到,由于机构中三角结构对称设置,三角结构的应力也近似呈对称分布,从而保证了机构的稳定性,有利于机构的运行。
由图5(b)可知,机构的总输出位移为271.32 μm,放大比为27.132,与理论值(30.000)之间的相对误差为9.56 %,说明该机构能对压电执行器输入的位移进行近似30倍的放大。其中产生误差的原因主要为:1) 三角结构与两级杠杆结构直接相连,三角结构须消除一定的应力而消耗部分能量,导致三角结构部分的输出位移减小;2) 三角结构与两级杠杆结构之间的铰链较多,当铰链尤其是支点处的直梁形铰链发生形变时,部分能量被铰链吸收用来消除应力,导致其转动敏感性减弱;3) 机构输入、输出位移的方向约相差90°,导致机构存在一定的寄生位移,即
2.2 动力学仿真
图6
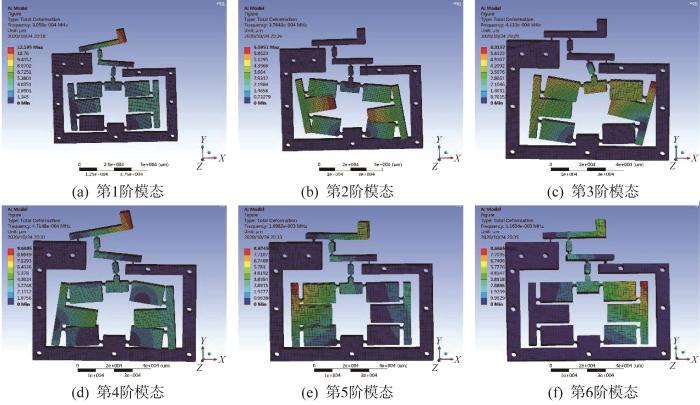
图6
三角混合两级杠杆微位移放大机构前六阶模态
Fig.6
The first six modes of triangular hybrid two-stage lever micro displacement amplification mechanism
表 3 三角混合两级杠杆微位移放大机构的固有频率 (Hz)
Table 3
| 模态 | 第1阶 | 第2阶 | 第3阶 | 第4阶 | 第5阶 | 第6阶 |
|---|---|---|---|---|---|---|
| 固有频率 | 305.90 | 376.43 | 413.20 | 471.48 | 1 098.20 | 1 163.40 |
由图6可知:机构的第1阶模态与机构的正常运动状态基本对应,基本上没有发生平面的扭曲变形;从第2阶模态开始,三角结构出现了不同程度的扭曲,在第2, 3, 4阶模态三角结构出现了挤压变形,两级杠杆结构也开始逐渐发生扭曲变形;从第5阶模态开始两级杠杆结构出现明显的向平面单侧的翻转变形,三角结构轻微翻转;相比第5阶模态,在第6阶模态2种结构的翻转幅度有所减小,但仍然存在一定程度的平翻转现象,表明该机构容易在较高阶模态下发生一定程度的偏离平面的振动。
由表3可知,机构的固有频率在第5阶模态发生了骤变,导致机构开始向平面外翻转。
综上可知,第1阶模态的305.90 Hz是仿真条件下最理想的固有频率,此时机构具有较强的抗干扰能力和较好的动力学性能。
3 结 论
1)设计了一种三角混合两级杠杆微位移放大机构。对其两级杠杆结构中的支点铰链类型进行了对比分析,结果表明,直梁形铰链对输入载荷的敏感性较强。并在此基础上,通过理论推导和有限元仿真得到了微位移放大机构的位移放大比分别为30.000和27.132,相对误差仅为9.56%。
2)通过机构静力学和动力学仿真得到机构的相对寄生运动比为0.348 2,第1阶固有频率最佳,表明机构具有较小的寄生位移、较强的抗干扰能力和较好的动力学性能,该结构是有效、可行的。研究结果为压电驱动器或快速反射镜支撑结构实现大量程的位移输出提供了一定的理论指导。
参考文献
并联微操作机器人技术及应用进展
[J].
Parallel micro-manipulation robot technology and application progress
[J].DOI:10.3901/JME.2008.12.012 [本文引用: 1]
Overview of the development of a visual based automated bio-micromanipulation systems
[J].
面向生物医学应用的微操作机器人技术发展态势
[J].
The development trend of micro-manipulation robot technology for biomedical applications
[J].DOI:10.3901/JME.2011.23.001 [本文引用: 1]
空间相机快速反射镜的两轴柔性支撑结构设计
[J].
Design of two-axis flexible support structure of fast reflector for space camera
[J].DOI:10.3788/IRLA201948.1214005 [本文引用: 1]
基于类Ⅴ型柔性铰链的微位移放大机构
[J].
Micro-displacement magnifying mechanism based on V-type flexible hinge
[J].
基于柔度比优化设计杠杆式柔性铰链放大机构
[J].
Optimal design of lever-type flexure hinge magnifying mechanism based on flexibility ratio
[J].
万向柔性铰链连接快速反射镜的设计与仿真
[J].
Design and simulation of fast reflector connected with universal flexible hinge
[J].DOI:10.3788/IRLA201948.0218002
两轴柔性支承快速反射镜结构控制一体化设计
[J].
Integrated design of two-axis flexible supporting fast reflector structure control
[J].
应用于压电叠堆泵的微位移放大机构
[J].
Micro-displacement amplification mechanism applied to piezoelectric stack pump
[J].DOI:10.3321/j.issn:1004-924X.2007.06.014 [本文引用: 1]
基于响应面法的交叉簧片铰链微位移机构优化设计
[J].
Optimization design of cross-spring hinge micro-displacement mechanism based on response surface method
[J].
柔性机构及其应用研究进展
[J].
Research progress of flexible mechanisms and their applications
[J].
A well-behaved revolute flexure joint for compliant mechanism design
[J].
含孔隙结构的新型直梁型柔性铰链研究
[J].
Study on a new type of straight beam flexible hinge with pore structure
[J].
基于刚度关系的柔性压电微夹钳设计
[J].
Design of flexible piezoelectric micro clamp based on stiffness relationship
[J].
Solutions to shape and topology eigenvalue optimization problems using a homogenization method
[J].
新型混合柔性铰链柔度研究
[J].
Research on flexibility of new hybrid flexure hinge
[J].
一种新型柔性铰链的设计、制作与试验研究
[J].
Design, manufacture and experimental research of a new type of flexible hinge
[J].
基于柔性铰链结构的高灵敏度低频光纤光栅加速度传感器
[J].
High sensitivity low frequency fiber grating acceleration sensor based on flexible hinge structure
[J].
Analysis of the displacement amplification ratio of bridge-type flexure hinge
[J].
新型全柔性动镜机构的设计与分析
[J].
Design and analysis of a new type of fully flexible moving mirror mechanism
[J].DOI:10.3969/j.issn.1007-2276.2012.01.036 [本文引用: 1]
基于大位移柔性结构的动镜支撑机构设计及研究
[J].
Design and research of moving mirror support mechanism based on large displacement flexible structure
[J].DOI:10.3969/j.issn.1007-2276.2014.08.033 [本文引用: 1]
Design of piezoelectric-actuated microgripper with a three-stage flexure-based amplification
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}