| Optimization Design |
|

|
|
|
| Optimization design of dolphin-inspired AUV shape based on Kriging surrogate model |
Jun TANG1( ),Dongxu QIU1(),Yuanhui XIE2 ),Dongxu QIU1(),Yuanhui XIE2 |
1.School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China
2.Intelligent Manufacturing College, Ganzhou Polytechnic, Ganzhou 341000, China |
|
|
|
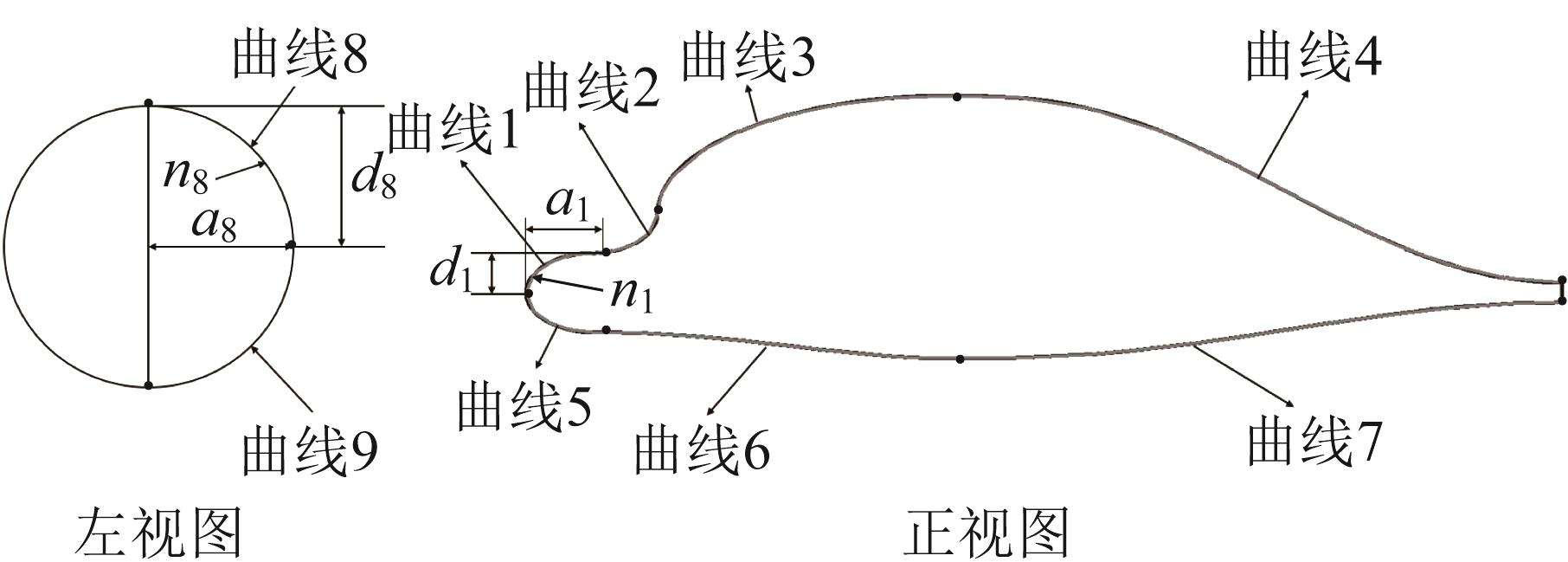
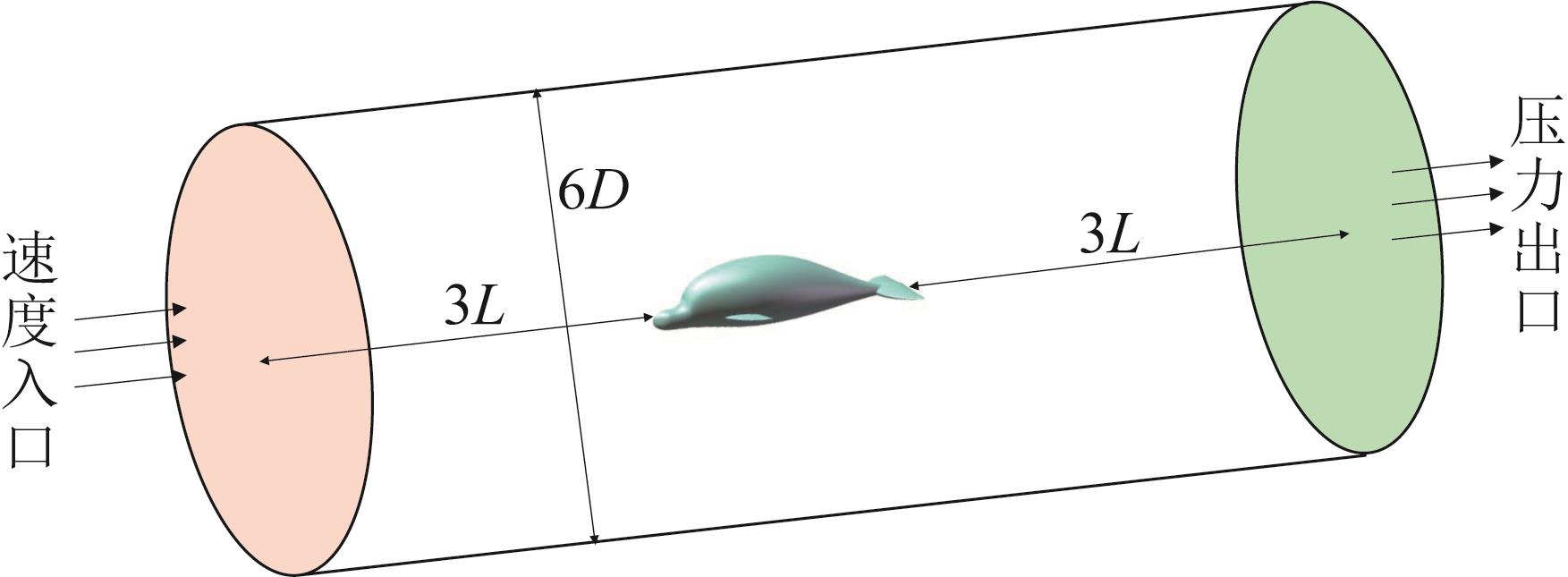
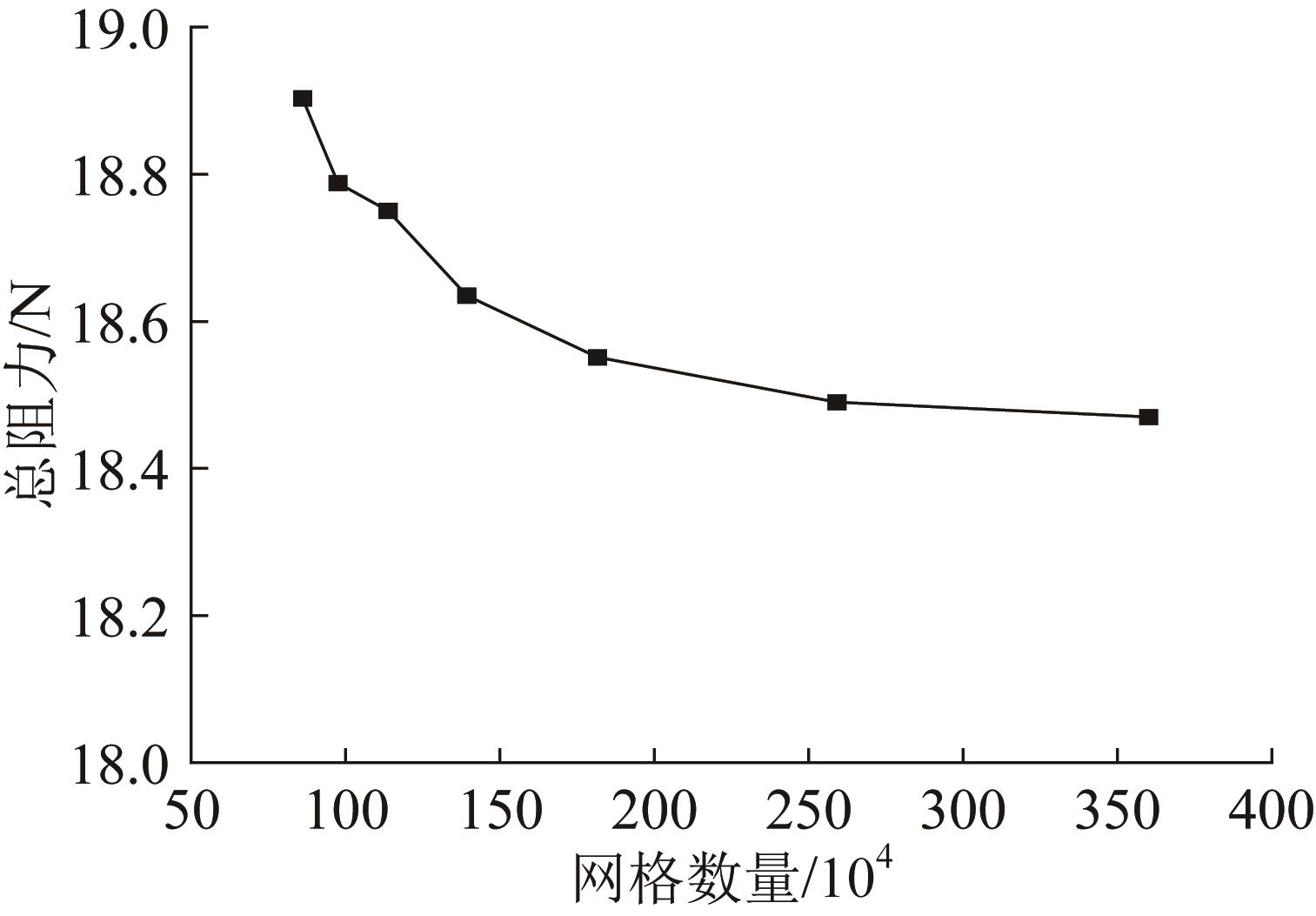
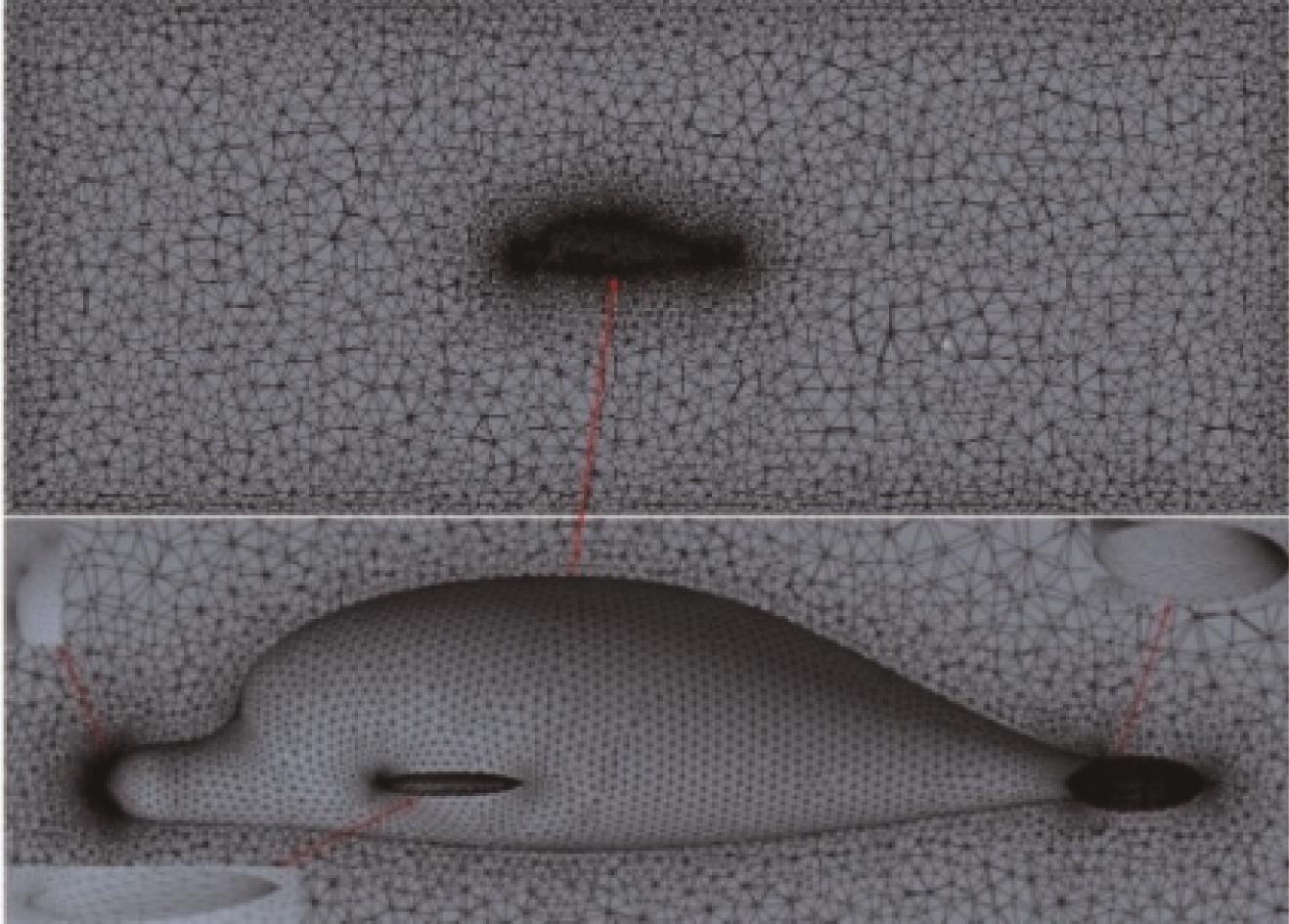
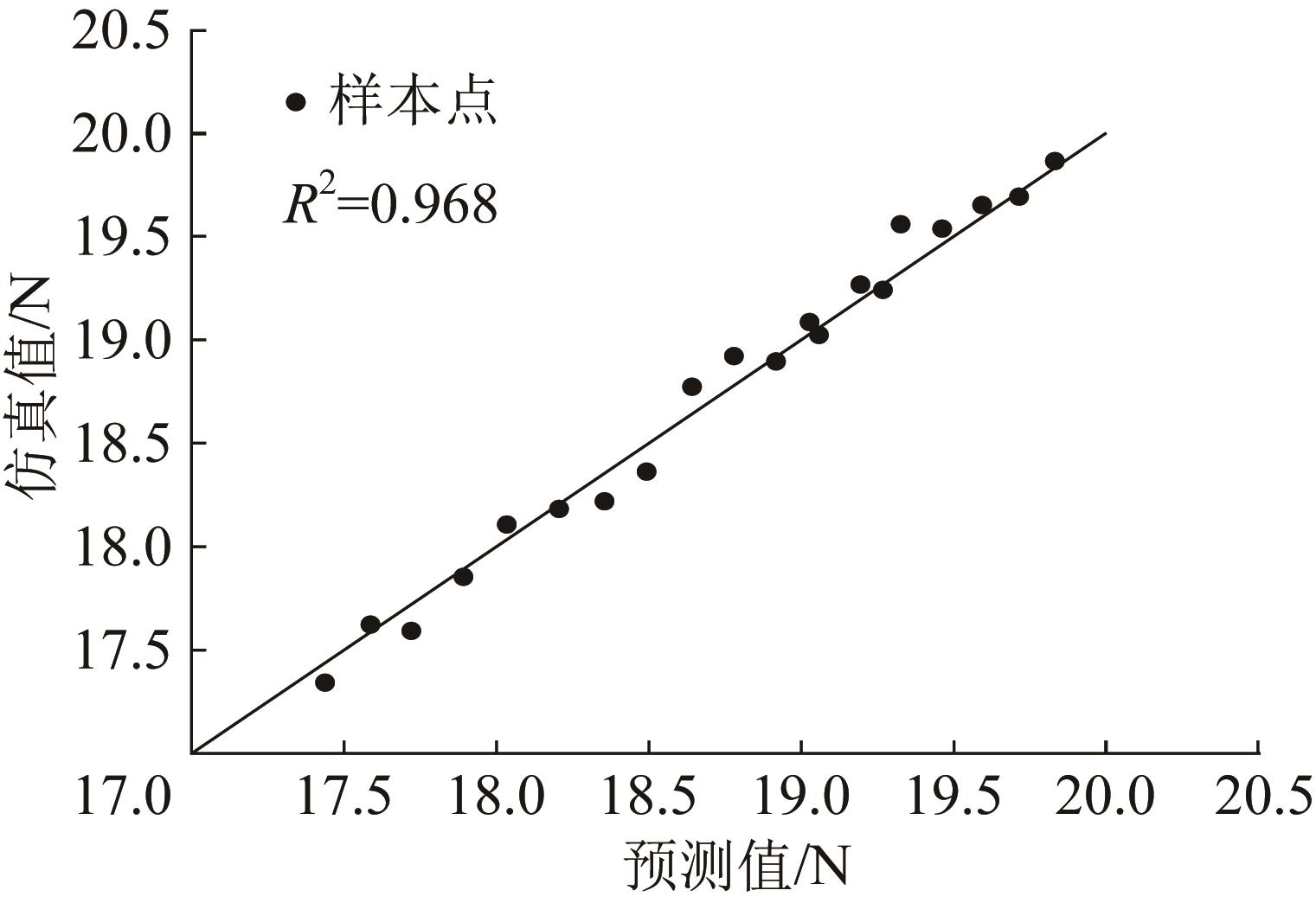
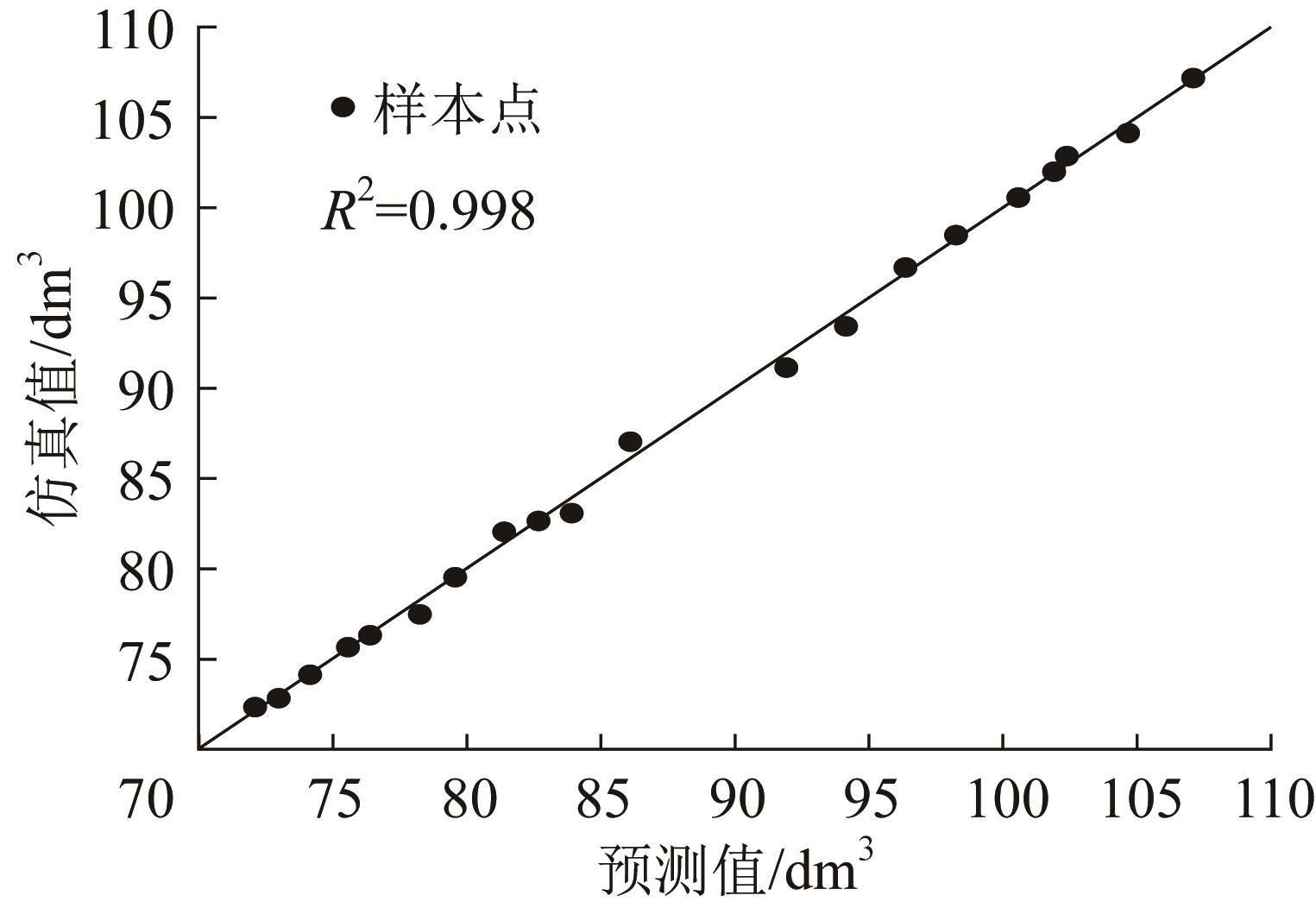
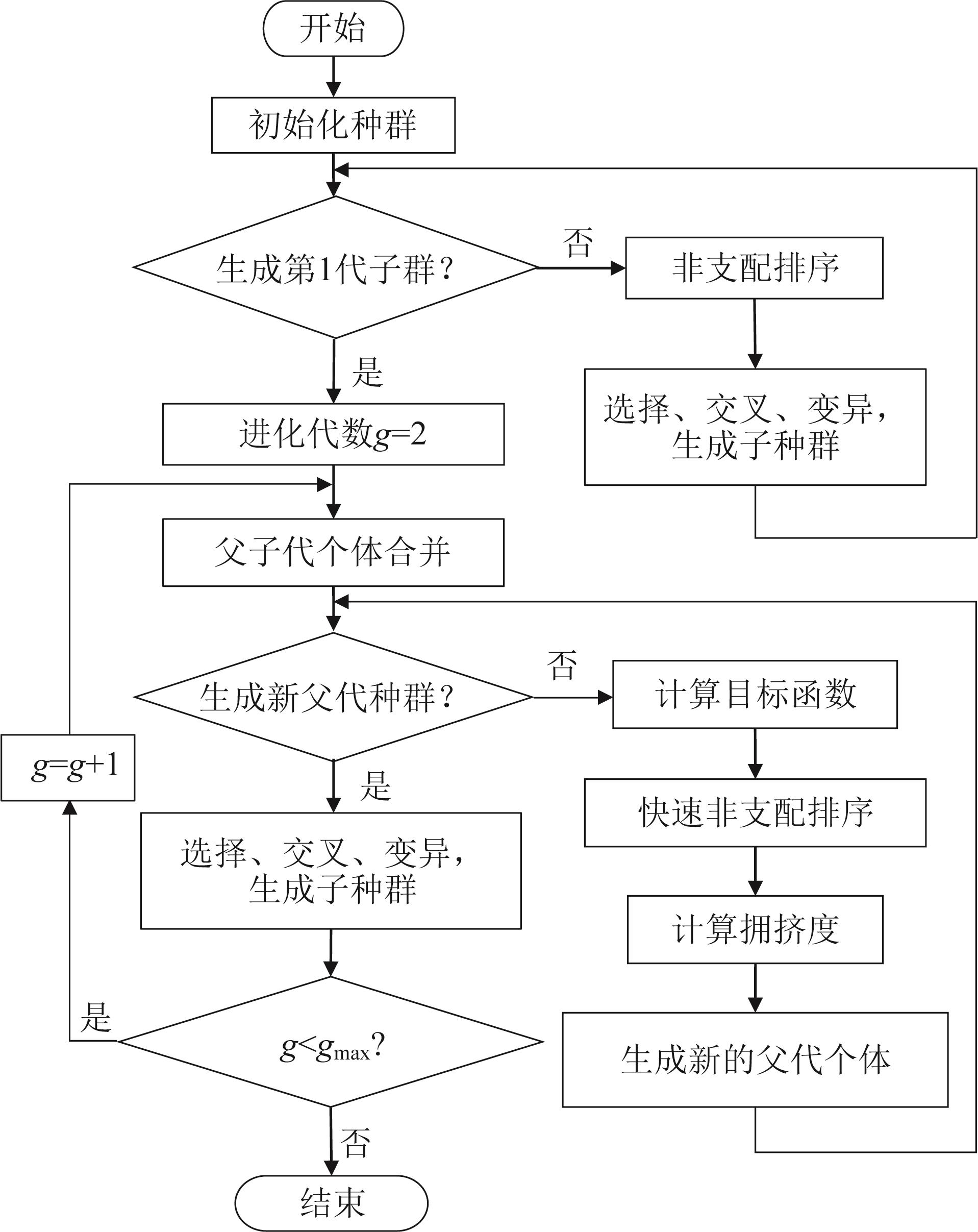
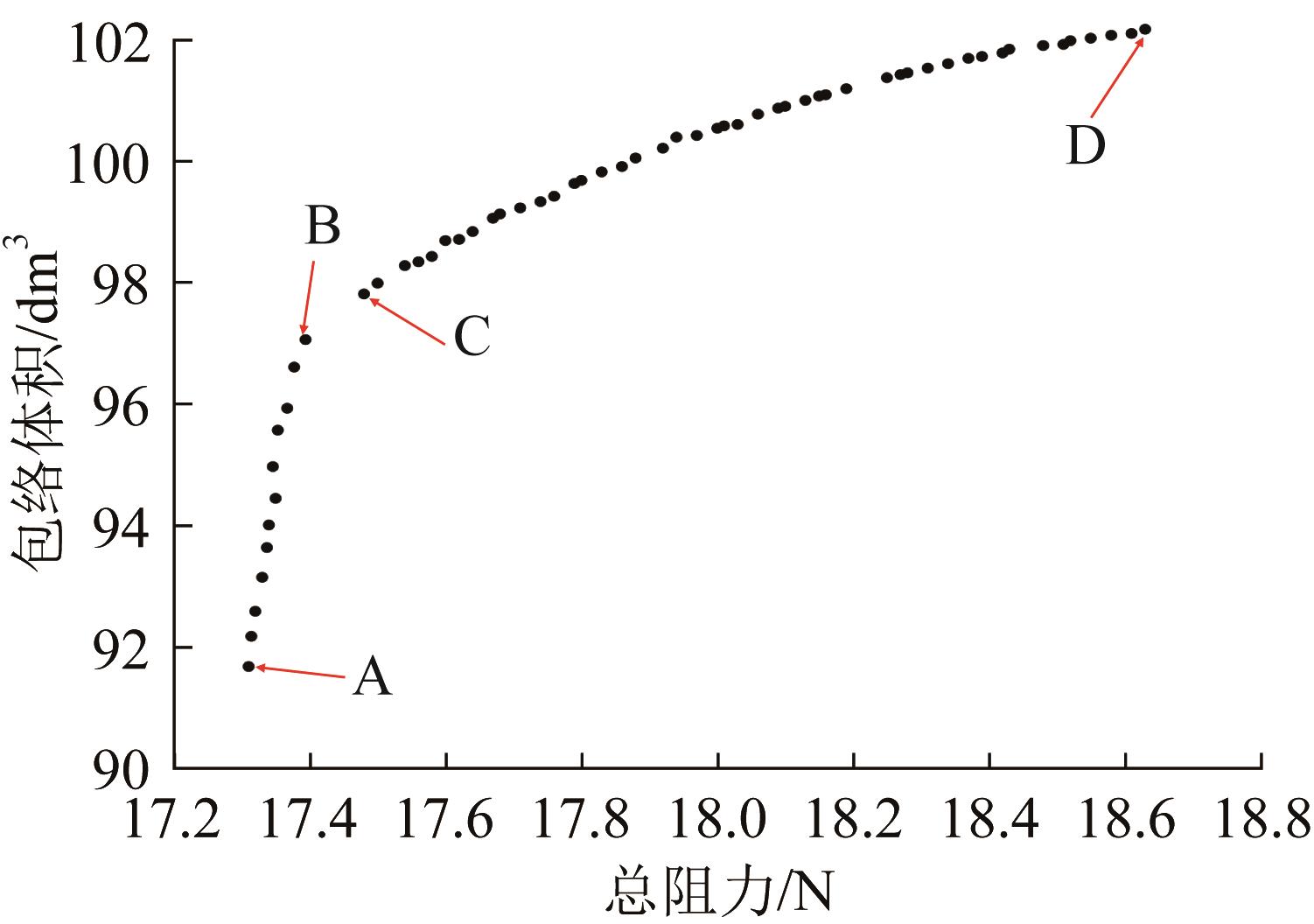
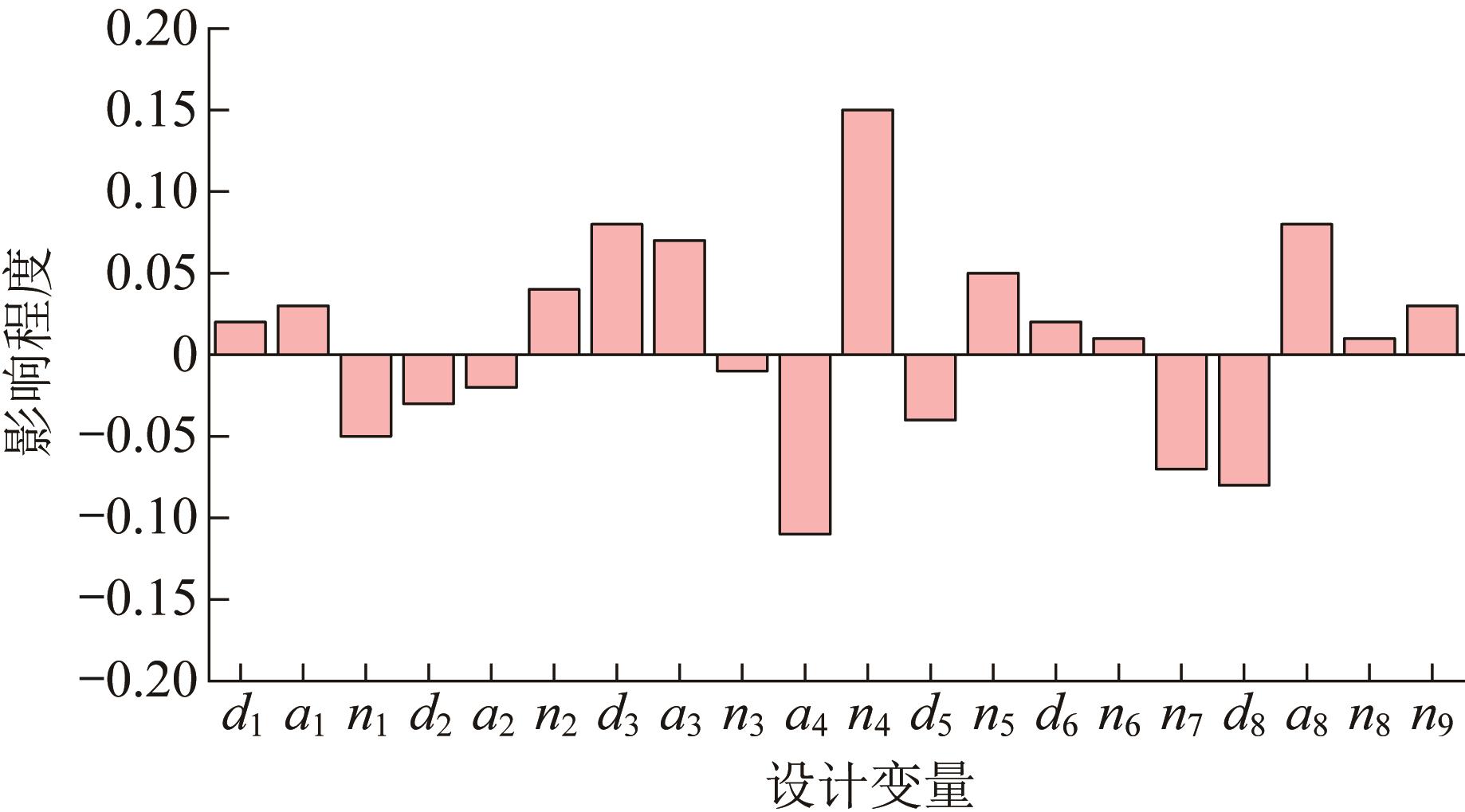
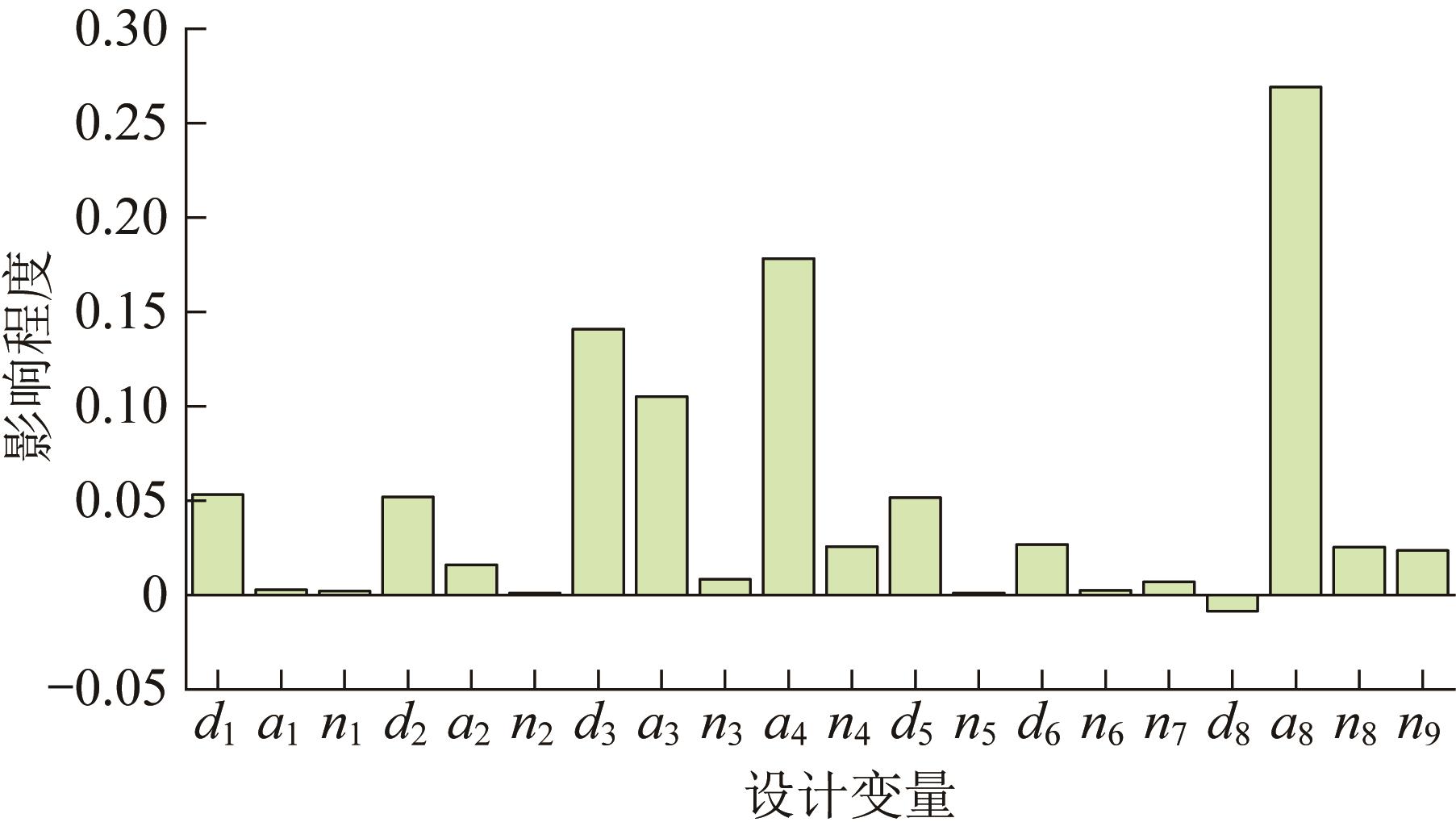
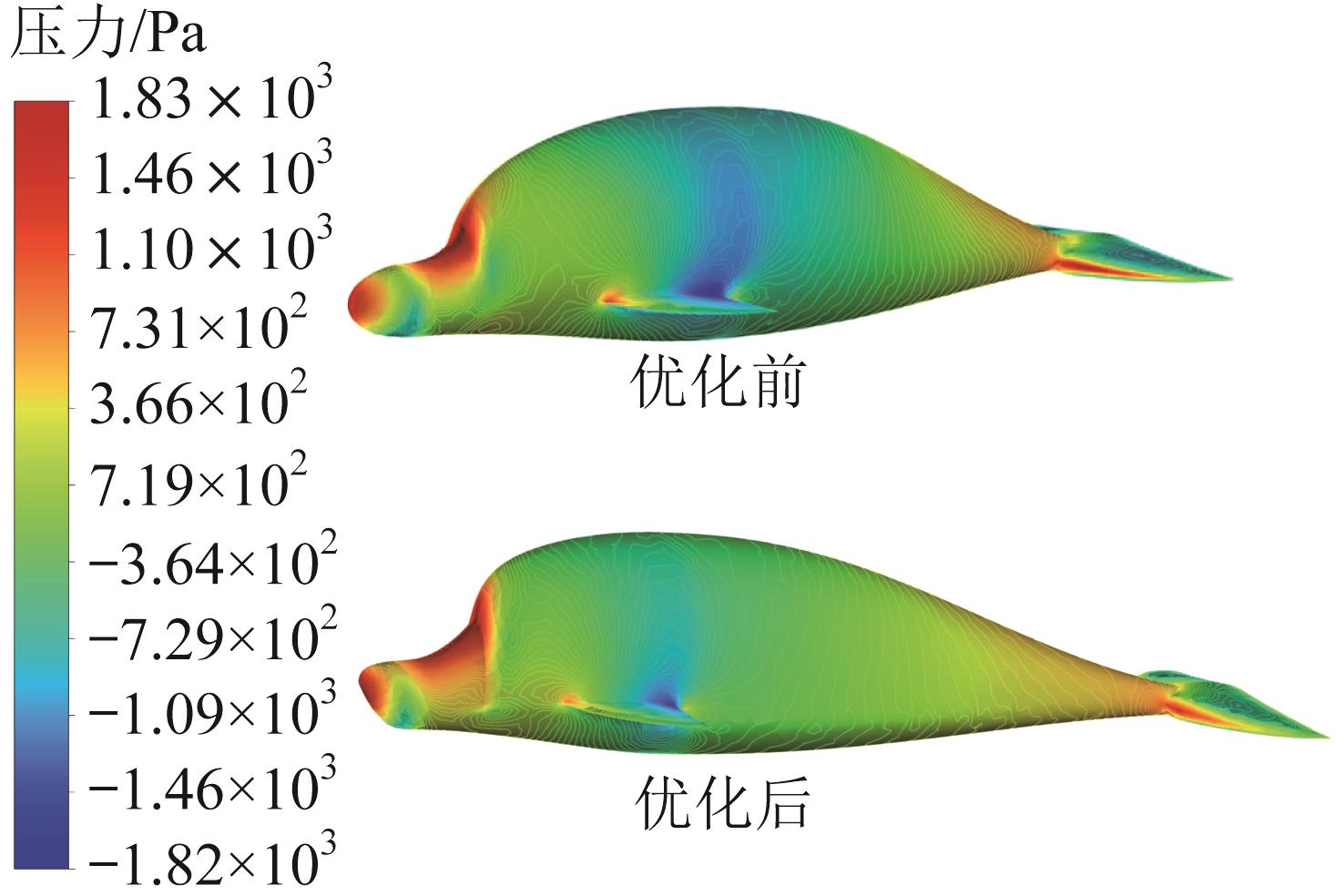
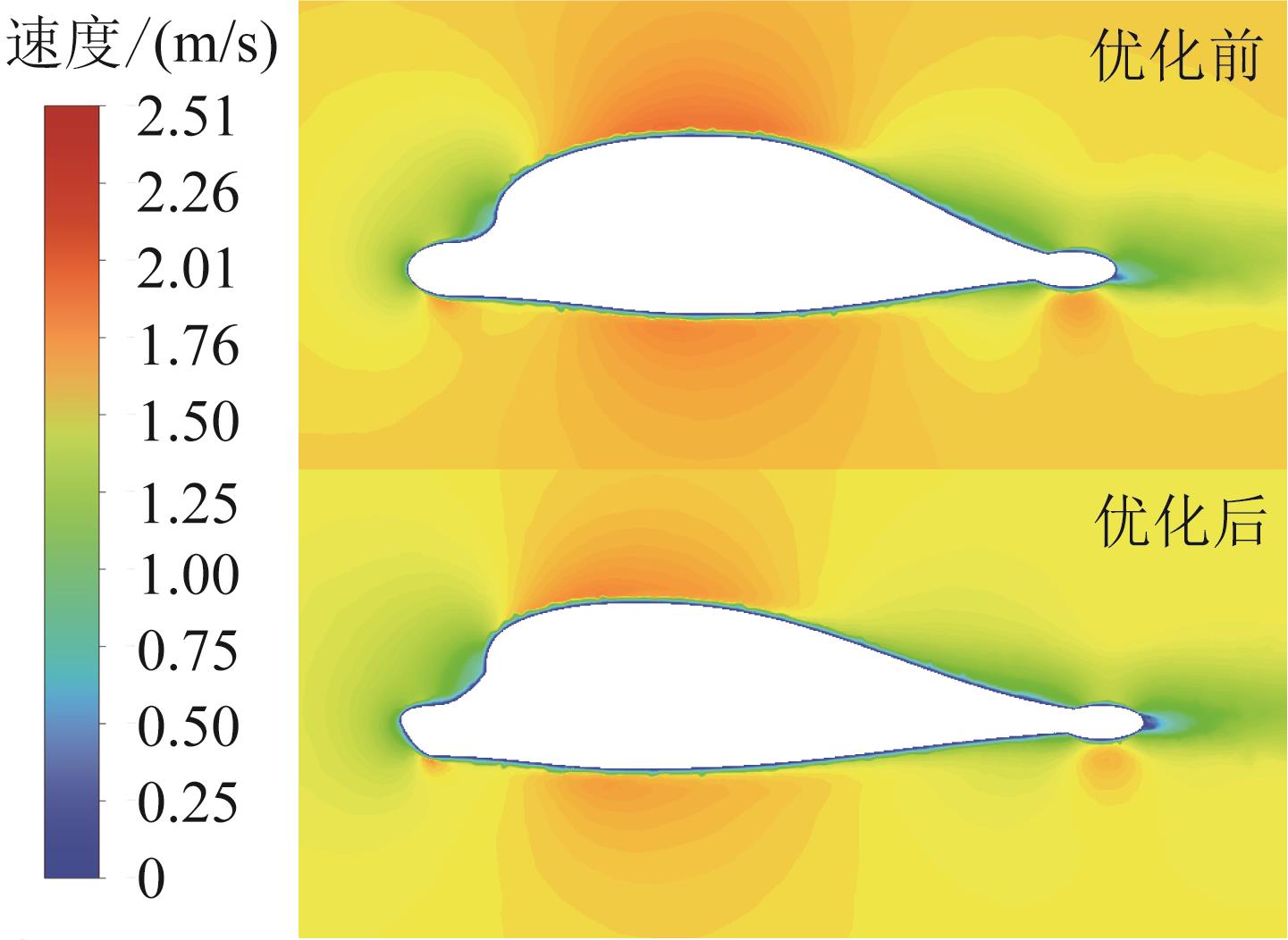
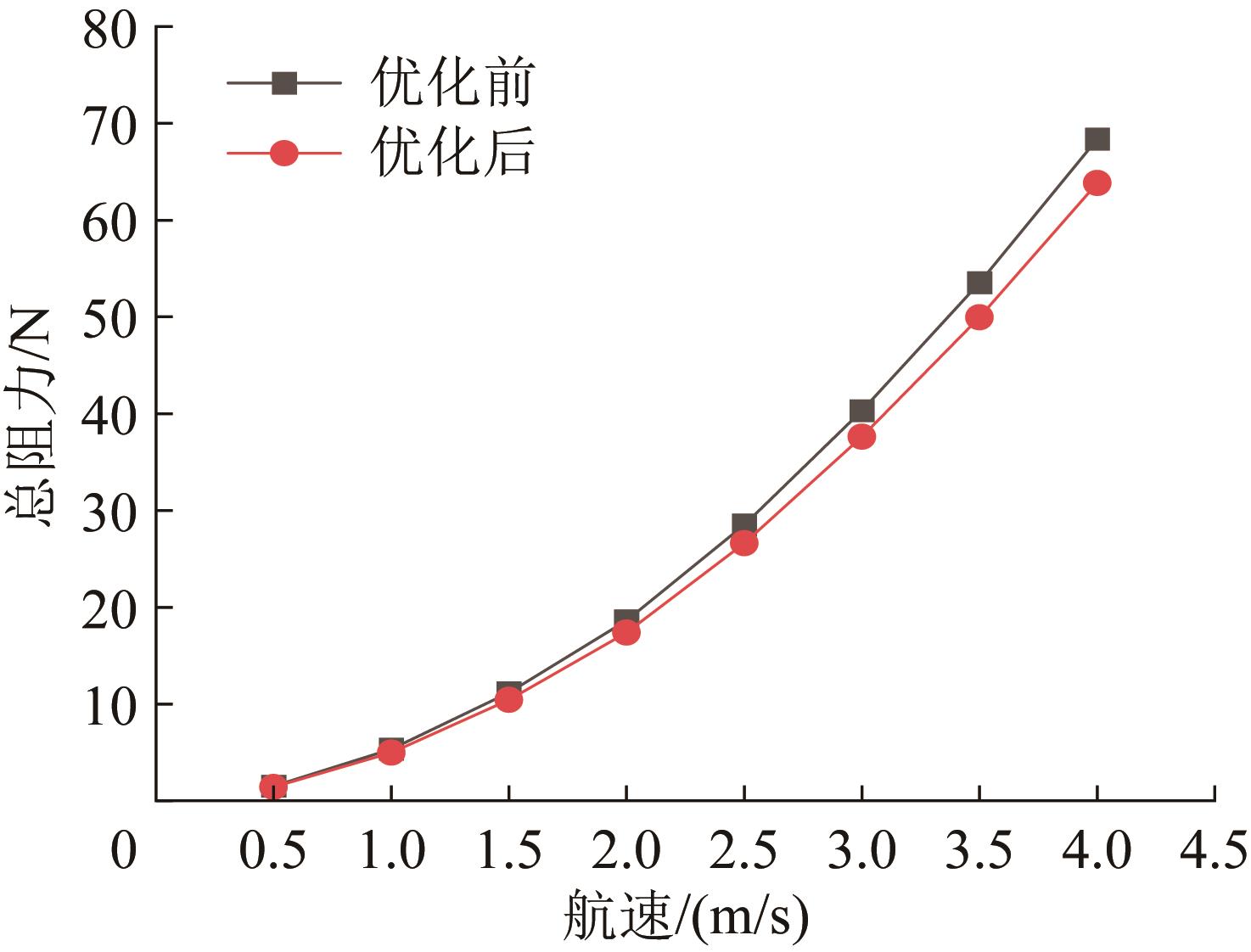
Abstract Aiming at the contradiction between low resistance and large volume in the shape design of autonomous underwater vehicles (AUVs), an optimization design method taking dolphins as bionic objects is explored to enhance the hydrodynamic performance and mission payload capacity of AUVs. Firstly, nine segments of Myring-type curves were used to parameterize and fit the dolphin contour, thereby establishing a three-dimensional AUV geometric model. Based on the Reynolds-averaged Navier-Stokes (RANS) equation and the standard k-ε model, the total resistance and envelope volume of the initial AUV were obtained through computational fluid dynamics (CFD) simulation. Subsequently, the optimal Latin hypercube sampling method was utilized to generate sample points, and Kriging surrogate models describing the mapping relationship between the total resistance and envelope volume of the AUV and design variables were constructed. Finally, with the objectives of minimizing total resistance and maximizing envelope volume, the Pareto optimal solution set was solved using NSGA-II (non-dominated sorting genetic algorithm-II). After optimization, the total resistance of the AUV decreased by 5.74% and the envelope volume increased by 5.87% at a navigation speed of 2 m/s. Flow field simulation analysis indicated that the optimized shape flattened the pressure gradient at the AUV tail, reducing the pressure difference resistance by 12.56%. At the same time, the velocity gradient at the AUV tail decreased, effectively inhibiting boundary layer separation. The resistance composition showed that the reduction in pressure difference resistance was the main reason for the decrease in total resistance. The horizontal stability index GH>0 indicated that the optimized AUV had dynamic stability. The multi-objective optimization method that integrates parametric modeling, CFD simulation, Kriging surrogate model and NSGA-II provides a reference for the shape optimization of underwater vehicles.
|
|
Received: 24 July 2025
Published: 28 April 2026
|
|
|
|
Corresponding Authors:
Dongxu QIU
E-mail: 9120060030@jxust.edu.cn;347943350@qq.com
|
基于Kriging代理模型的仿海豚AUV外形优化设计
针对自主水下航行器(autonomous underwater vehicle, AUV)外形设计中低阻力与大容积之间的矛盾,探索以海豚为仿生对象的优化设计方法,以提升AUV的水动力性能与任务载荷能力。首先,采用9段Myring型曲线对海豚轮廓进行参数化拟合,建立AUV三维几何模型,并基于雷诺平均纳维-斯托克斯(Reynolds-averaged Navier-Stokes, RANS)方程和标准-模型,通过CFD(computational fluid dynamics,计算流体力学)仿真获取初始AUV的总阻力与包络体积。随后,利用最优拉丁超立方抽样法生成样本点,构建描述AUV总阻力、包络体积与设计变量映射关系的Kriging代理模型。最后,以最小化总阻力和最大化包络体积为目标,采用NSGA-II(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)求解Pareto最优解集。优化后的AUV在2 m/s航速下的总阻力降低了5.74%,包络体积增大了5.87%。流场仿真分析表明:优化外形使AUV尾部的压力梯度趋于平缓,压差阻力降低了12.56%;同时,AUV尾部的速度梯度减小,有效抑制了边界层分离。阻力构成显示压差阻力降低是AUV总阻力下降的主要原因。水平面稳定性指数GH>0,表明优化后的AUV具有动稳定性。融合参数化建模、CFD仿真、Kriging代理模型与NSGA-II的多目标优化方法,为水下航行器的外形优化提供了参考。
关键词:
自主水下航行器,
仿生设计,
计算流体力学,
Kriging代理模型,
多目标优化
|
|
| [[1]] |
WANG P B, LIU X Y, SONG A G. Actuation and locomotion of miniature underwater robots: a survey[J]. Engineering, 2025, 51: 195-214.
|
|
|
| [[2]] |
SUN C Y, SONG B W, WANG P. Parametric geometric model and shape optimization of an underwater glider with blended-wing-body[J]. International Journal of Naval Architecture and Ocean Engineering, 2015, 7(6): 995-1006.
|
|
|
| [[3]] |
包海默, 安轩昂, 宋梅萍, 等. 水下机器人减阻设计研究进展[J]. 机械设计, 2025, 42(3): 163-172.
BAO H M, AN X A, SONG M P, et al. Advances in drag reduction design for underwater robots[J]. Journal of Machine Design, 2025, 42(3): 163-172.
|
|
|
| [[4]] |
REN K, YU J C. Research status of bionic amphibious robots: a review[J]. Ocean Engineering, 2021, 227: 108862.
|
|
|
| [[5]] |
马楷东, 张瑞荣, 郭鑫, 等. 仿双髻鲨头部的仿生机器鱼外形设计及其流场特性[J]. 力学学报, 2021, 53(12): 3389-3398. doi:10.6052/0459-1879-21-160
MA K D, ZHANG R R, GUO X, et al. Shape design and flow field characteristics of a robotic fish imitating the head of a hammerhead[J]. Chinese Journal of Theoretical and Applied Mechanics, 2021, 53(12): 3389-3398.
doi: 10.6052/0459-1879-21-160
|
|
|
| [[6]] |
田晓洁, 刘运祥, 刘贵杰, 等. 仿金枪鱼三维建模及流场受力分析[J]. 中国海洋大学学报(自然科学版), 2019, 49(11): 139-144.
TIAN X J, LIU Y X, LIU G J, et al. Tuna 3D-modeling and stress calculation in flow field[J]. Periodical of Ocean University of China, 2019, 49(11): 139-144.
|
|
|
| [[7]] |
包海默, 马宏宇, 乔松, 等. 水下捕捞机器人耐压舱仿生造型设计[J]. 机械设计, 2022, 39(5): 135-141.
BAO H M, MA H Y, QIAO S, et al. Bionic modeling design of compressive cabin of underwater fishing vehicle[J]. Journal of Machine Design, 2022, 39(5): 135-141.
|
|
|
| [[8]] |
HUANG X S, HAN D X, ZHANG Y, et al. Numerical simulation of bionic underwater vehicle morphology drag optimisation and flow field noise analysis[J]. Journal of Marine Science and Engineering, 2024, 12(8): 1373.
|
|
|
| [[9]] |
ZHANG Y, WU Z X, WANG J, et al. Design and analysis of a bionic gliding robotic dolphin[J]. Biomimetics, 2023, 8(2): 151.
|
|
|
| [[10]] |
LIU J C, ZHANG C, LIU Z N, et al. Design and analysis of a novel tendon-driven continuum robotic dolphin[J]. Bioinspiration & Biomimetics, 2021, 16(6): 065002.
|
|
|
| [[11]] |
LI Z H, XIA D, CAO J B, et al. Hydrodynamics study of dolphin's self-yaw motion realized by spanwise flexibility of caudal fin[J]. Journal of Ocean Engineering and Science, 2022, 7(3): 213-224.
|
|
|
| [[12]] |
WU Z X, YU J Z, YUAN J, et al. Towards a gliding robotic dolphin: design, modeling, and experiments[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 260-270.
|
|
|
| [[13]] |
LI Z H, XIA D, ZHOU X F, et al. The hydrodynamics of self-rolling locomotion driven by the flexible pectoral fins of 3-D bionic dolphin[J]. Journal of Ocean Engineering and Science, 2022, 7(1): 29-40.
|
|
|
| [[14]] |
MYRING D F. A theoretical study of body drag in subcritical axisymmetric flow[J]. Aeronautical Quarterly, 1976, 27(3): 186-194.
|
|
|
| [[15]] |
施迅, 周悦, 吴诗昊, 等. 三体模块化渔业监测AUV结构设计及外形优化[J]. 上海海洋大学学报, 2024, 33(6): 1429-1438.
SHI X, ZHOU Y, WU S H, et al. Structural design and shape optimization of three-body modular fishery monitoring AUV[J]. Journal of Shanghai Ocean University, 2024, 33(6): 1429-1438.
|
|
|
| [[16]] |
SENER M Z, AKSU E. The effects of head form on resistance performance and flow characteristics for a streamlined AUV hull design[J]. Ocean Engineering, 2022, 257: 111630.
|
|
|
| [[17]] |
LIU F, DENG X D. Multi-objective optimization of an autonomous underwater vehicle shape based on an improved Kriging model[J]. Ocean Engineering, 2024, 313(Part 1): 119388.
|
|
|
| [[18]] |
WANG Z L, YANG C L, WEN Q B, et al. Shape optimization of autonomous underwater helicopters based on different parameter curves and various optimization algorithms[J]. Ocean Engineering, 2024, 309: 118420.
|
|
|
| [[19]] |
CHEN X D, YU L, LIU L Y, et al. Multi-objective shape optimization of autonomous underwater vehicle by coupling CFD simulation with genetic algorithm[J]. Ocean Engineering, 2023, 286(Part 2): 115722.
|
|
|
| [[20]] |
CHEN S P, LIU F. Multi-objective shape optimization of underwater vehicles based on an adaptive sampling algorithm[J]. Applied Ocean Research, 2024, 146: 103950.
|
|
|
| [[21]] |
ZHANG K, CHENG L, WANG Q, et al. Three-dimensional configuration optimization of X semi-dynamic rudder for fully appended AUV based on response surface methodology and NSGA-II[J]. Ocean Engineering, 2025, 329: 121107.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|