| Robotic and Mechanism Design |
|


|
|
|
| Research on path planning method based on dynamic fusion of ant colony optimization and genetic algorithm |
Jianbo CHE1( ),Donglin TANG1(),Yuanyuan HE1,2,Yuanyao HU1,Bingsheng LU1,Junhui ZHANG1 ),Donglin TANG1(),Yuanyuan HE1,2,Yuanyao HU1,Bingsheng LU1,Junhui ZHANG1 |
1.School of Mechanical and Electrical Engineering, Southwest Petroleum University, Chengdu 610500, China
2.Sichuan Special Equipment Inspection Institute, Chengdu 610000, China |
|
|
|
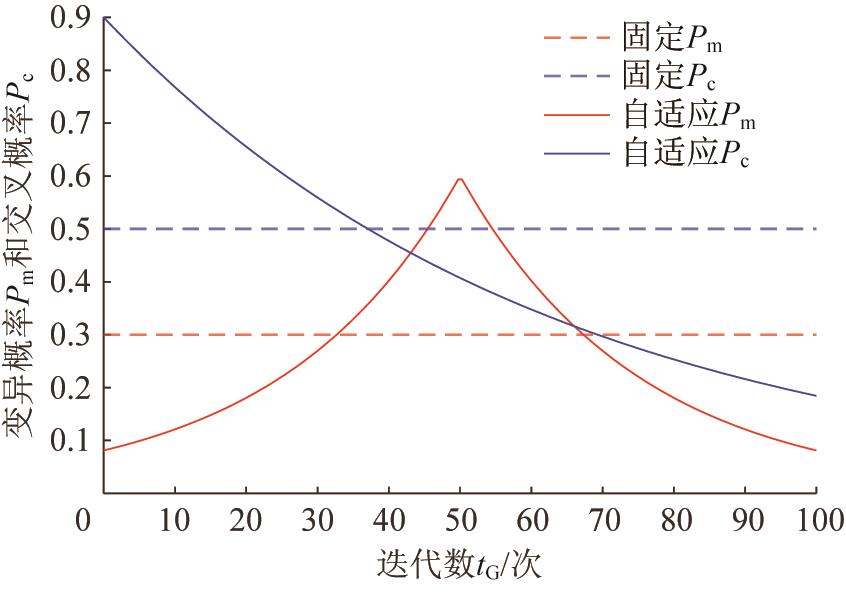
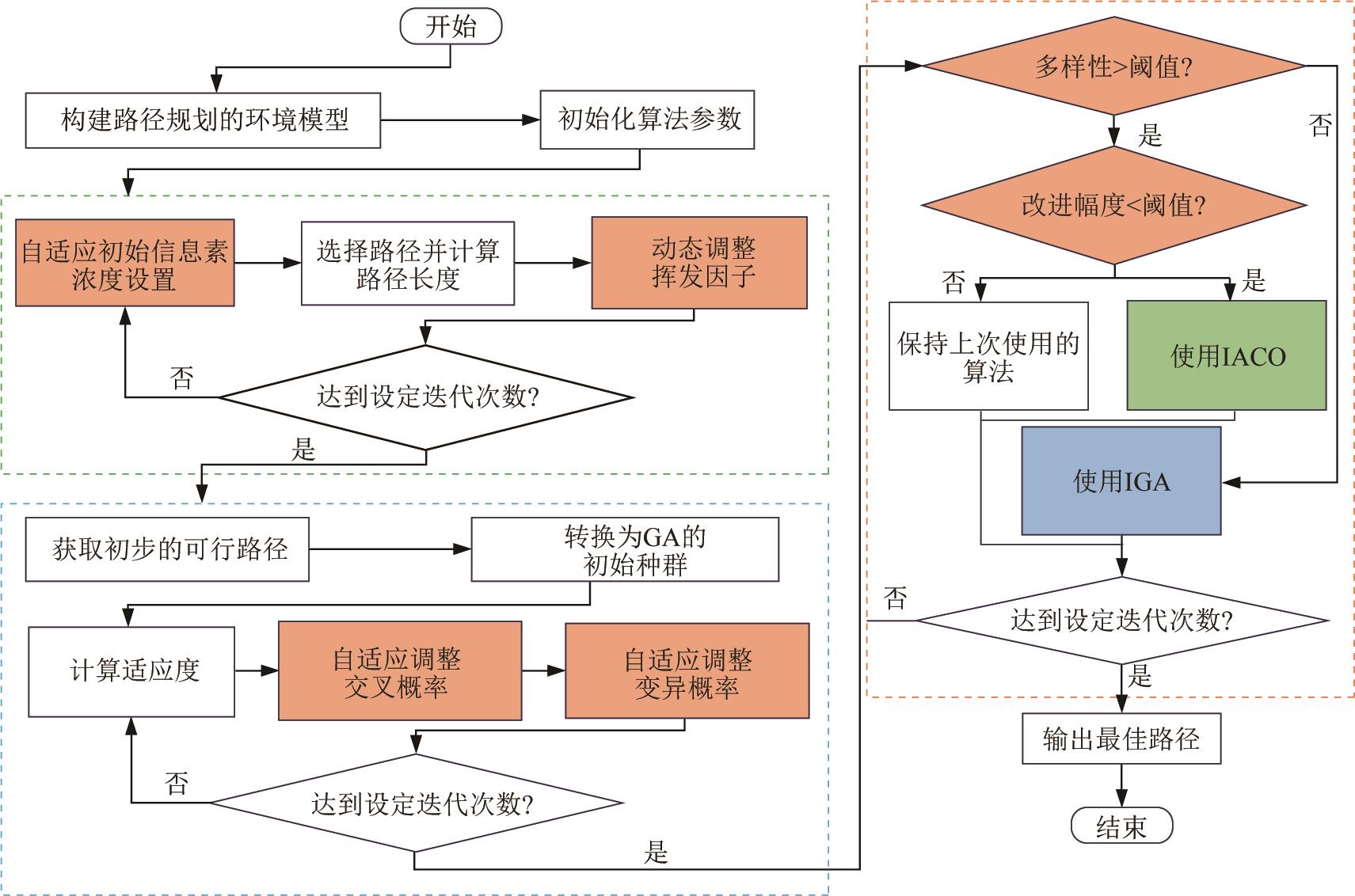
Abstract The traditional path planning algorithms that combine ant colony optimization (ACO) and genetic algorithm (GA) commonly suffer from unsmooth paths, slow convergence speed and high energy consumption. To address these issues, a path planning method based on dynamic fusion of ACO and GA (DACO-GA) is proposed to improve the efficiency and accuracy of path planning. In the initial stage, ACO was used to generate the initial population, and GA was introduced for optimization and adjustment. In later stages, the leading role of the two algorithms was dynamically switched, enabling coordinated complementarity between global and local search. The algorithm integrated adaptive pheromone distribution, dynamic evaporation factors and adaptive crossover/mutation probability adjustment mechanisms, which effectively enhanced search capability and mitigate the tendency to fall into local optima. Finally, optimization experiments were conducted on the key control parameters of the DACO-GA to validate the effectiveness of each improvement mechanism. The DACO-GA was compared with traditional algorithms across multiple typical scenarios to further evaluate its adaptability in complex environments. The results showed that the proposed algorithm could generate smoother and shorter paths, demonstrating strong global optimization ability and faster convergence speed. The DACO-GA not only provides an effective solution for complex path planning problems, but also offers technical references for the optimization in areas such as multi-agent cooperation and robot navigation.
|
|
Received: 09 June 2025
Published: 30 December 2025
|
|
|
|
Corresponding Authors:
Donglin TANG
E-mail: 13540786343@163.com;tdl840451816@163.com
|
动态融合蚁群算法与遗传算法的路径规划方法研究
结合蚁群算法(ant colony optimization, ACO)与遗传算法(genetic algorithm, GA)的传统路径规划方法普遍存在路径不平滑、收敛速度慢及能耗较高等问题。为解决上述问题,提出了一种动态融合ACO与GA(dynamic fusion of ACO and GA, DACO-GA)的路径规划方法,以提升路径规划的效率与精度。该方法初期采用ACO生成初始种群,并引入GA进行优化调整;在后续阶段,通过动态切换2种算法的主导角色,实现全局与局部搜索的协调互补。算法设计中融合了自适应信息素分布、动态挥发因子及自适应交叉/变异概率调节机制,有效提升了搜索能力并缓解了局部最优问题。最后,围绕DACO-GA中的关键控制参数开展优化实验,以验证各改进机制的有效性。在多个典型场景下将DACO-GA与传统算法进行对比,以进一步评估其在复杂环境下的适应性。结果表明,所提出的算法可生成更平滑且长度更短的路径,展现出良好的全局优化能力以及较快的收敛速度。DACO-GA不仅为复杂路径规划问题提供了有效的解决方案,还可为多智能体协作、机器人导航等领域的优化提供技术参考。
关键词:
路径规划,
动态融合,
蚁群算法,
遗传算法
|
|
| [[1]] |
崔衡, 马宗方, 宋琳, 等. 基于连续顶点分区的混凝土3D打印路径规划算法[J]. 工程设计学报, 2024, 31(3): 271-279.
CUI H, MA Z F, SONG L, et al. Path planning algorithm for concrete 3D printing based on continuous vertex partitioning[J]. Chinese Journal of Engineering Design, 2024, 31(3): 271-279.
|
|
|
| [[2]] |
WONGPIROMSARN T, KALLMANN M, KOLLING A. Locally homotopic paths: ensuring consistent paths in hierarchical path planning[J]. IEEE Robotics and Automation Letters, 2024, 9(9): 7565-7572.
|
|
|
| [[3]] |
巩慧, 倪翠, 王朋, 等. 基于Dijkstra算法的平滑路径规划方法[J]. 北京航空航天大学学报, 2024, 50(2): 535-541.
GONG H, NI C, WANG P, et al. A smooth path planning method based on Dijkstra algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(2): 535-541.
|
|
|
| [[4]] |
LI Y C, DONG X Z, DING Q Q, et al. Improved A-STAR algorithm for power line inspection UAV path planning[J]. Energies, 2024, 17(21): 5364.
|
|
|
| [[5]] |
冯垚, 周志峰, 沈亦纯, 等. 基于改进RRT算法的避障路径规划[J]. 工程设计学报, 2023, 30(6): 707-716.
FENG Y, ZHOU Z F, SHEN Y C, et al. Obstacle avoidance path planning based on improved RRT algorithm[J]. Chinese Journal of Engineering Design, 2023, 30(6): 707-716.
|
|
|
| [[6]] |
赵红专, 张鑫, 张蓓聆, 等. 基于改进人工势场的智能车动态安全椭圆路径规划方法[J]. 山东大学学报(工学版), 2025, 55(3): 46-57.
ZHAO H Z, ZHANG X, ZHANG B L, et al. A dynamic safe elliptical path planning method for intelligent vehicles based on improved artificial potential field[J]. Journal of Shandong University (Engineering Science), 2025, 55(3): 46-57.
|
|
|
| [[7]] |
TANG X J, LI Y L. Research on path planning of self-driving vehicles based on improved DWA algorithm[J]. Applied Mathematics and Nonlinear Sciences, 2024, 9(1): 20231664.
|
|
|
| [[8]] |
LIU H B, ZHANG S, YANG X D. Overview of path planning algorithms[J]. Recent Patents on Engineering, 2024, 18(7): 76-89.
|
|
|
| [[9]] |
GU G Q, LI H T, ZHAO C S. A multi-strategy enhanced marine predator algorithm for global optimization and UAV swarm path planning[J]. IEEE Access, 2024, 12: 112095-112115.
|
|
|
| [[10]] |
ZHOU Q, LIAN Y, WU J Y, et al. An optimized Q-Learning algorithm for mobile robot local path planning[J]. Knowledge-Based Systems, 2024, 286: 111400.
|
|
|
| [[11]] |
WANG F, ZHAO L, BAI Y. Path planning for unmanned surface vehicles based on modified artificial fish swarm algorithm with local optimizer[J]. Mathematical Problems in Engineering, 2022, 2022(1): 1283374.
|
|
|
| [[12]] |
王芸. 基于模拟退火算法的末端车载无人机物流配送路径规划研究[J]. 自动化与仪器仪表, 2025(2): 247-251.
WANG Y. Research on the logistics and distribution route planning of terminal on-board UAV based on simulated annealing algorithm[J]. Automation & Instrumentation, 2025(2): 247-251.
|
|
|
| [[13]] |
XUE J, TAN Z F, DAI N N, et al. Particle swarm optimization bat algorithm path automatically planning research for police drones in hilly cities[J]. Journal of Systems Science and Information, 2024, 12(1): 125-144.
|
|
|
| [[14]] |
HONG J J, TSAI R G, CHEN X L, et al. U*: GA-based path planning algorithm for surface floating garbage cleaning robot[J]. Journal of Intelligent & Fuzzy Systems, 2024, 46(1): 837-850.
|
|
|
| [[15]] |
刘天湖, 赖嘉上, 孙伟龙, 等. 基于跳点优化蚁群算法的菠萝田间导航路径规划[J]. 农业机械学报, 2025, 56(4): 387-396.
LIU T H, LAI J S, SUN W L, et al. Navigation path planning of pineapple planting field based on jump point optimized ant colony algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2025, 56(4): 387-396.
|
|
|
| [[16]] |
田雅琴, 胡梦辉, 刘文涛, 等. 基于跳点搜索-遗传算法的自主移动机器人路径规划[J]. 工程设计学报, 2023, 30(6): 697-706.
TIAN Y Q, HU M H, LIU W T, et al. Path planning of autonomous mobile robot based on jump point search-genetic algorithm[J]. Chinese Journal of Engineering Design, 2023, 30(6): 697-706.
|
|
|
| [[17]] |
WAHAB M N AB, NAZIR A, KHALIL A, et al. Improved genetic algorithm for mobile robot path planning in static environments[J]. Expert Systems with Applications, 2024, 249(Part C): 123762.
|
|
|
| [[18]] |
CHONG Y, CHAI H Z, LI Y H, et al. Automatic recognition of geomagnetic suitability areas for path planning of autonomous underwater vehicle[J]. Marine Geodesy, 2021, 44(4): 287-305.
|
|
|
| [[19]] |
LI B J, WU G H, HE Y M, et al. An overview and experimental study of learning-based optimization algorithms for the vehicle routing problem[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(7): 1115-1138.
|
|
|
| [[20]] |
ZHENG X C, CAO J J, ZHANG Y L, et al. Optimized ant colony system algorithm for path planning in radiation environments[J]. Nuclear Engineering and Technology, 2025, 57(7): 103471.
|
|
|
| [[21]] |
HUO F C, ZHU S, DONG H L, et al. A new approach to smooth path planning of Ackerman mobile robot based on improved ACO algorithm and B-spline curve[J]. Robotics and Autonomous Systems, 2024, 175: 104655.
|
|
|
| [[22]] |
CHÂARI I, KOUBÂA A, TRIGUI S, et al. SmartPATH: an efficient hybrid ACO-GA algorithm for solving the global path planning problem of mobile robots[J]. International Journal of Advanced Robotic Systems, 2014, 11(7): 94.
|
|
|
| [[23]] |
NIU Q Y, FU Y, DONG X W. Omnidirectional AGV path planning based on improved genetic algorithm[J]. World Electric Vehicle Journal, 2024, 15(4): 166.
|
|
|
| [[24]] |
HENG H, RAHIMAN W. ACO-GA-based optimization to enhance global path planning for autonomous navigation in grid environments[J/OL]. IEEE Transactions on Evolutionary Computation, 2025: 1-15 (2025-02-18) [2025-04-23]. .
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|