| Theory and Method of Mechanical Design |
|


|
|
|
| Path planning algorithm for concrete 3D printing based on continuous vertex partitioning |
Heng CUI( ),Zongfang MA(),Lin SONG,Chao LIU,Yixuan HAN ),Zongfang MA(),Lin SONG,Chao LIU,Yixuan HAN |
| College of Information and Control Engineering, Xi'an University of Architecture and Technology, Xi'an 710055, China |
|
|
|
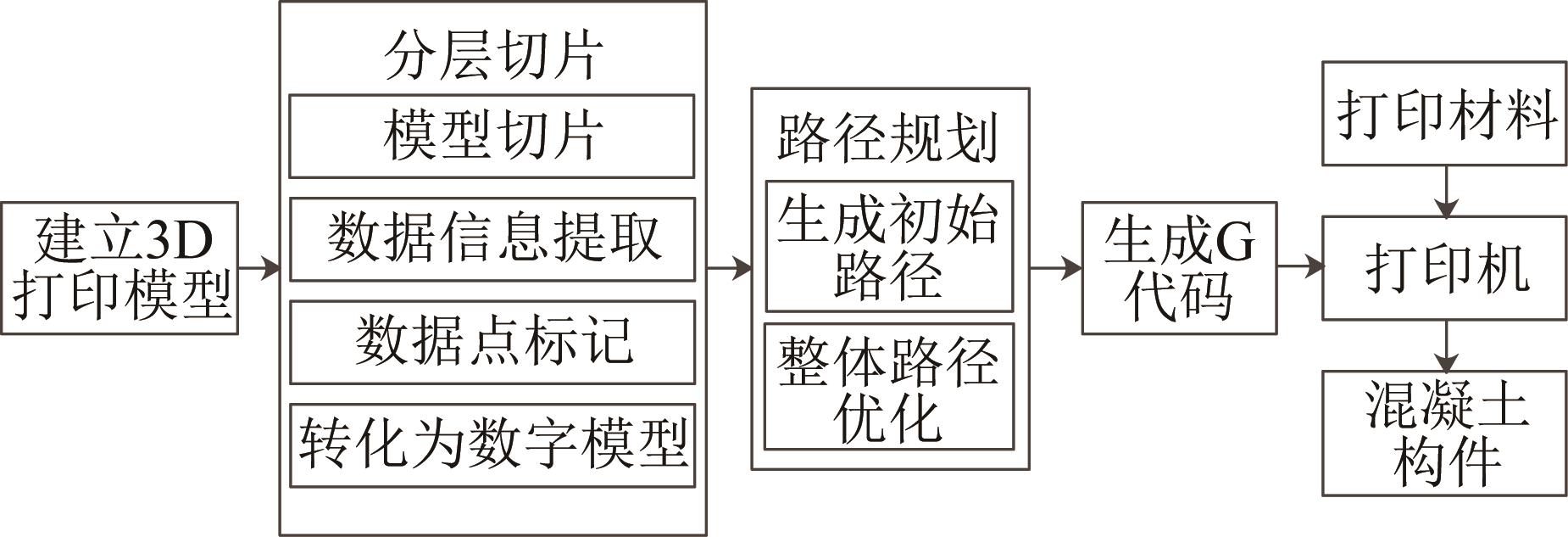
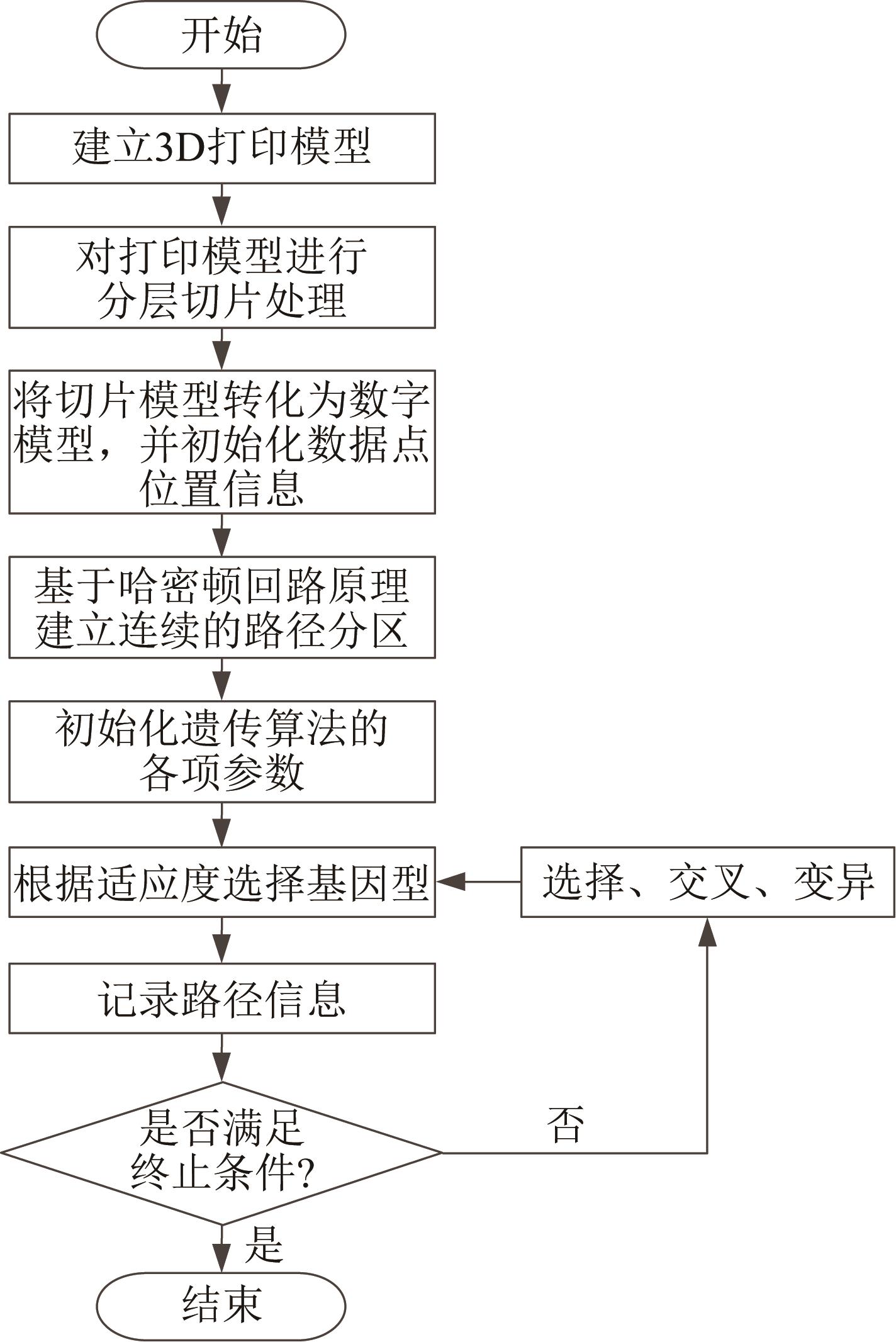
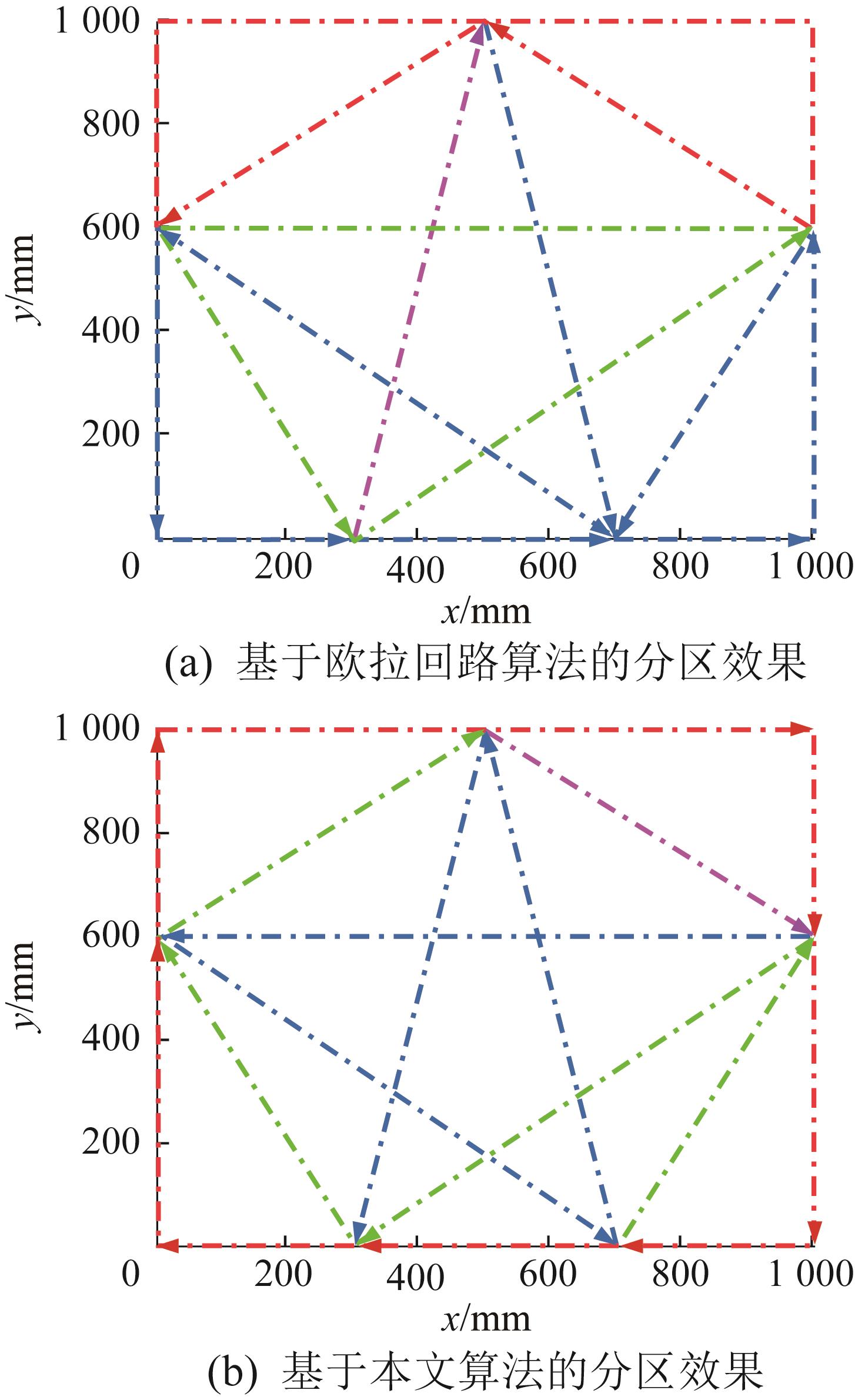
Abstract Aiming at the problems of poor forming quality and long printing time of concrete 3D printing components, a path planning algorithm based on continuous vertex partitioning was proposed. Firstly, the continuous vertex partitioning method based on Hamiltonian circuit was used to divide the print area into several continuous regions to ensure that the print nozzle would not pass the same vertex many times during the printing process, thus avoiding the problem of repeated printing and poor forming quality. Then, the genetic algorithm was used to search each region, and the shortest printing path was determined through iteration and optimization. The experimental results showed that compared with other path planning algorithms, the proposed algorithm could significantly reduce the empty travel and start-stop times of the print nozzle, and shorten the printing time by more than 10%, which effectively improved the forming quality and printing efficiency for concrete components. The concrete 3D printing path planning algorithm based on continuous vertex partitioning solves the problems of poor forming quality and long printing time of concrete components by effectively dividing the print area, intelligentiy searching the shortest path and combining the optimal path, which can provide strong technical support for the development and application of concrete 3D printing technology.
|
|
Received: 25 July 2023
Published: 27 June 2024
|
|
|
|
Corresponding Authors:
Zongfang MA
E-mail: 24854119@qq.com;mazf@xauat.edu.cn
|
基于连续顶点分区的混凝土3D打印路径规划算法
针对混凝土3D打印构件成形质量差和打印时间长的问题,提出了一种基于连续顶点分区的路径规划算法。首先,采用基于哈密顿回路的连续顶点分区方法,将打印区域划分为多个连续的区域,以确保在打印过程中打印喷头不会多次经过同一顶点,从而避免了重复打印和成形质量差的问题。然后,使用遗传算法搜索每个区域,通过迭代和优化来确定最短的打印路径。实验结果表明,与其他路径规划算法相比,所提出的算法能够显著减少打印喷头的空行程和启停次数,且缩短打印时间10%以上,有效地提升了混凝土构件的成形质量与打印效率。基于连续顶点分区的混凝土3D打印路径规划算法通过有效划分打印区域、智能搜索最短路径以及合并优化路径的方式,解决了混凝土3D打印构件成形质量差和打印时间长的问题,这可为混凝土3D打印技术的发展和应用提供有力的技术支持。
关键词:
混凝土3D打印,
哈密顿回路,
遗传算法,
路径优化
|
|
| [1] |
盛蕾,武雷.3D打印混凝土技术研究综述[J].混凝土与水泥制品,2021(10):7-11.
SHENG L, WU L. Summary of 3D printed concrete technology research[J]. China Concrete and Cement Products, 2021(10): 7-11.
|
|
|
| [2] |
王猛.增材制造直接分层和路径规划技术研究[J].机械工程与自动化,2018(6):34-35,38. doi:10.3969/j.issn.1672-6413.2018.06.012
WANG M. Research on direct slicing and path planning technology of additive manufacturing[J]. Mechanical Engineering & Automation, 2018(6): 34-35, 38.
doi: 10.3969/j.issn.1672-6413.2018.06.012
|
|
|
| [3] |
汤寄予,席义斌,高丹盈,等.3D打印混凝土的可打印性研究综述[J].混凝土与水泥制品,2022(12):18-23.
TANG J Y, XI Y B, GAO D Y, et al. Review on printability of 3D printed concrete[J]. China Concrete and Cement Products, 2022(12): 18-23.
|
|
|
| [4] |
崔凤英,李晓微.3D打印路径规划研究[J].青岛科技大学学报(自然科学版),2020,41(2):101-105.
CUI F Y, LI X W. Research on 3D printing path planning[J]. Journal of Qingdao University of Science and Technology (Natural Science Edition), 2020, 41(2): 101-105.
|
|
|
| [5] |
马宗方,万伟鹏,宋琳,等.采用欧拉回路的混凝土3D打印路径优化算法[J].机械科学与技术: 1-7(2023-02-21)[2023-07-15]..
MA Z F, WAN W P, SONG L, et al. Path optimization algorithm for concrete 3D printing using the Euler circuit[J]. Mechanical Science and Technology for Aerospace Engineering: 1-7 (2023-02-21) [2023-07-15]. .
|
|
|
| [6] |
WAN Q, WANG L, MA G W. Continuous and adaptable printing path based on transfinite mapping for 3D concrete printing[J]. Automation in Construction, 2022, 142: 104471.
|
|
|
| [7] |
FOK K Y, GANGANATH N, CHENG C T, et al. A 3D printing path optimizer based on christofides algorithm[C]//2016 IEEE International Conference on Consumer Electronics. Nantou, Taiwan, China, May 27-29, 2016.
|
|
|
| [8] |
王祎,葛静怡,薛昕惟,等.改进Q学习的薄壁结构3D打印路径规划[J].计算机工程与应用,2022,58(12):299-303. doi:10.3778/j.issn.1002-8331.2012-0438
WANG Y, GE J Y, XUE X W, et al. Path planning for complex thin-walled structures in 3D printing: improved Q-learning method[J]. Computer Engineering and Applications, 2022, 58(12): 299-303.
doi: 10.3778/j.issn.1002-8331.2012-0438
|
|
|
| [9] |
曹俊峰.面向3D混凝土打印的双螺旋路径规划算法研究与施工作业系统搭建[D].武汉:华中科技大学,2021.
CAO J F. Research on 3D concrete printing-oriented double helix path planning algorithm and construction operation system construction[D]. Wuhan: Huazhong University of Science and Technology, 2021.
|
|
|
| [10] |
高遵海,陈倬.图的路径运算矩阵与哈密顿回路等路径问题[J].华中科技大学学报(自然科学版),2021,49(2):32-36. doi:10.13245/j.hust.210204
GAO Z H, CHEN Z. Path-operation matrices of graph for solving Hamilton cycles and other path problems[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2021, 49(2): 32-36.
doi: 10.13245/j.hust.210204
|
|
|
| [11] |
王港华.基于遗传算法的小规模TSP问题研究分析[J]. 物流工程与管理,2022,44(3):111-114. doi:10.3969/j.issn.1674-4993.2022.03.031
WANG G H. Research analysis of small-scale TSP problem based on genetic algorithm[J]. Logistics Engineering and Management, 2022, 44(3): 111-114.
doi: 10.3969/j.issn.1674-4993.2022.03.031
|
|
|
| [12] |
胡作玄,王献芬.两个古老的回路问题[J].科学世界,2007(5):82-89.
HU Z X, WANG X F. Two ancient circuit problems[J]. Science World, 2007(5): 82-89.
|
|
|
| [13] |
张大旺,王栋民.3D打印混凝土材料及混凝土建筑技术进展[J].硅酸盐通报,2015,34(6):1583-1588.
ZHANG D W, WANG D M. Progress of 3D print of concrete materials and concrete construction technology[J]. Bulletin of the Chinese Ceramic Society, 2015, 34(6): 1583-1588.
|
|
|
| [14] |
黄舒弈,张宇,徐卫国.机器人3D打印建筑的打印路径规划方法探索[J].建筑技艺,2022,28(7):79-81. doi:10.3969/j.issn.1674-6635.2022.07.010
HUANG S Y, ZHANG Y, XU W G. Exploring tool path planning methods of the robotic 3DP construction[J]. Architecture Technique, 2022, 28(7): 79-81.
doi: 10.3969/j.issn.1674-6635.2022.07.010
|
|
|
| [15] |
叶志琳.基于邻接矩阵和递归算法的哈密顿回路研究[J].佳木斯大学学报(自然科学版),2022,40(4):164-167.
YE Z L. Research on Hamiltonian loop based on adjacency matrix and recursive algorithm[J]. Journal of Jiamusi University (Natural Science Edition), 2022, 40(4): 164-167.
|
|
|
| [16] |
陈旭.基于遗传算法的移动机器人路径规划研究综述[J].科技和产业,2023,23(8):274-278. doi:10.3969/j.issn.1671-1807.2023.08.042
CHEN X. Summary of research on path planning of mobile robot based on genetic algorithms[J]. Science Technology and Industry, 2023, 23(8): 274-278.
doi: 10.3969/j.issn.1671-1807.2023.08.042
|
|
|
| [17] |
尹雅楠.基于改进遗传算法的无人机航迹规划与任务分配方法研究[D].石家庄:河北科技大学,2023.
YIN Y N. Research on UAV path planning and task allocation method based on improved genetic algorithm[D]. Shijiazhuang: Hebei University of Science and Technology, 2023.
|
|
|
| [18] |
刘树赵,邹德旋,罗鸿赟,等.改进遗传算法求解旅行商问题[J].计算机时代,2023(5):66-71.
LIU S Z, ZOU D X, LUO H Y, et al. Improved genetic algorithm to solve traveling salesman problem[J]. Computer Era, 2023(5): 66-71.
|
|
|
| [19] |
雷聪蕊,葛正浩,魏林林,等.3D打印模型切片及路径规划研究综述[J].计算机工程与应用,2021,57(3):24-32. doi:10.3778/j.issn.1002-8331.2009-0106
LEI C R, GE Z H, WEI L L, et al. Review of 3D printing model slicing and path planning research[J]. Computer Engineering and Applications, 2021, 57(3): 24-32.
doi: 10.3778/j.issn.1002-8331.2009-0106
|
|
|
| [20] |
翟晓雅,陈发来.分形模型的3D打印路径规划[J].计算机辅助设计与图形学学报,2018,30(6):1123-1135. doi:10.3724/sp.j.1089.2018.16618
ZHAI X Y, CHEN F L. 3D printing path planning of fractal models[J]. Journal of Computer-Aided Design & Computer Graphics, 2018, 30(6): 1123-1135.
doi: 10.3724/sp.j.1089.2018.16618
|
|
|
| [21] |
圣文顺,徐爱萍,徐刘晶.基于蚁群算法与遗传算法的TSP路径规划仿真[J].计算机仿真,2022,39(12):398-402,412. doi:10.3969/j.issn.1006-9348.2022.12.073
SHENG W S, XU A P, XU L J. Simulation of traveling salesman path planning based on ant colony algorithm and genetic algorithm[J]. Computer Simulation, 2022, 39(12): 398-402, 412.
doi: 10.3969/j.issn.1006-9348.2022.12.073
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|