| Robotic and Mechanism Design |
|

|
|
|
| Design and analysis of two-dimensional precision positioning platform based on piezoelectric ceramic drive |
Jian DU1,2( ),Xijing ZHU1,2(),Jing LI1,2 ),Xijing ZHU1,2(),Jing LI1,2 |
1.School of Mechanical Engineering, North University of China, Taiyuan 030051, China
2.Shanxi Key Laboratory of Advanced Manufacturing Technology, Taiyuan 030051, China |
|
|
|
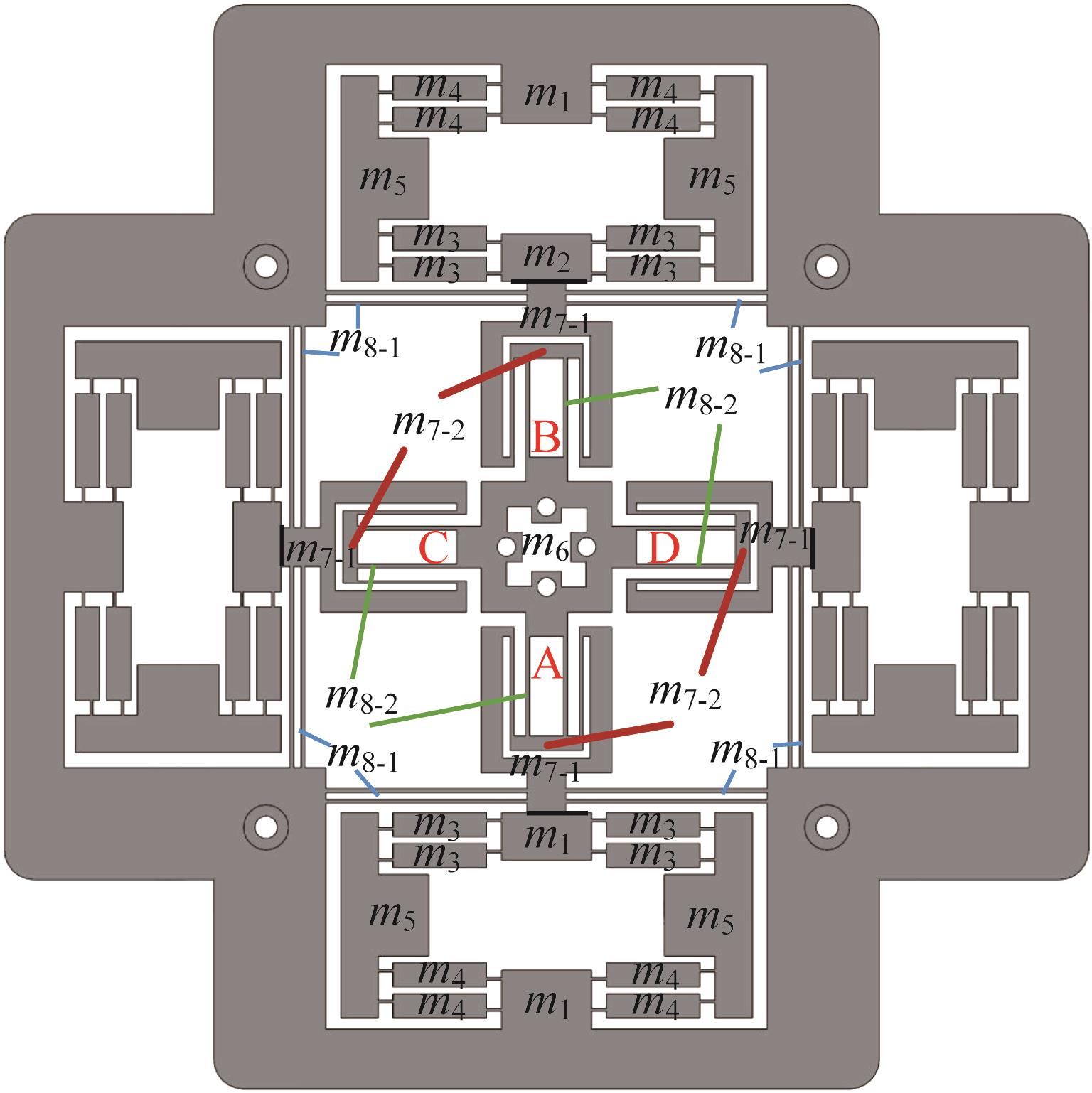
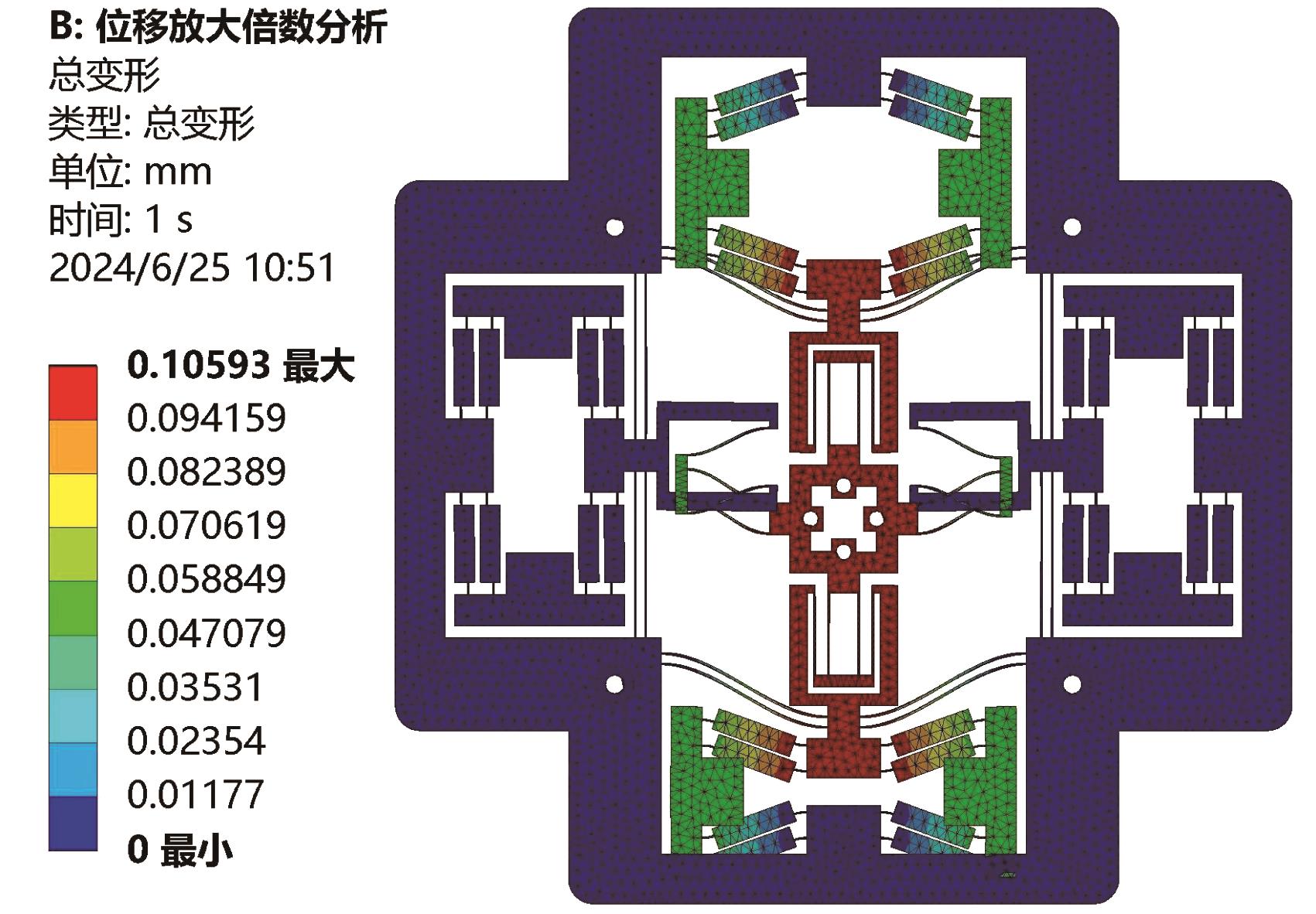
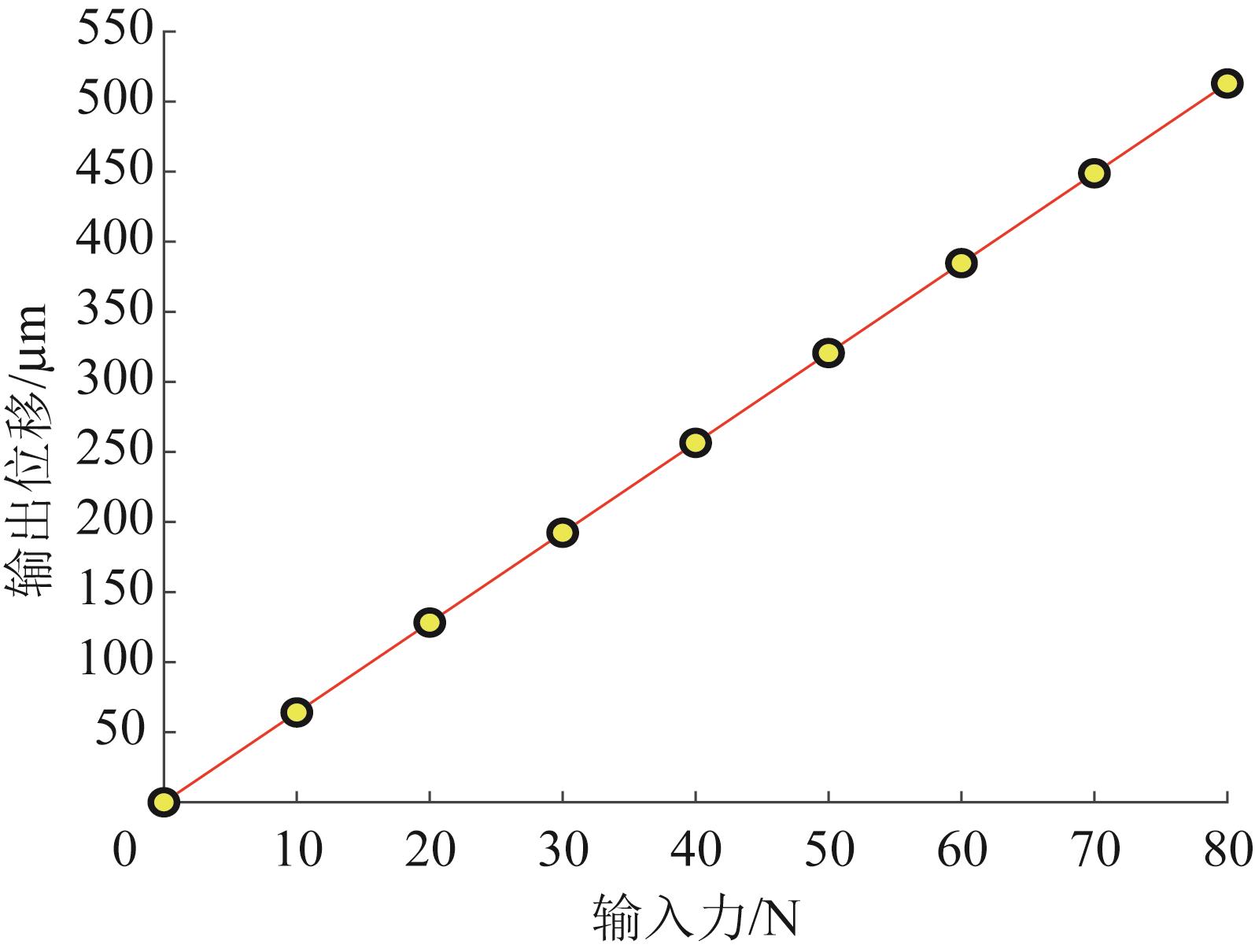
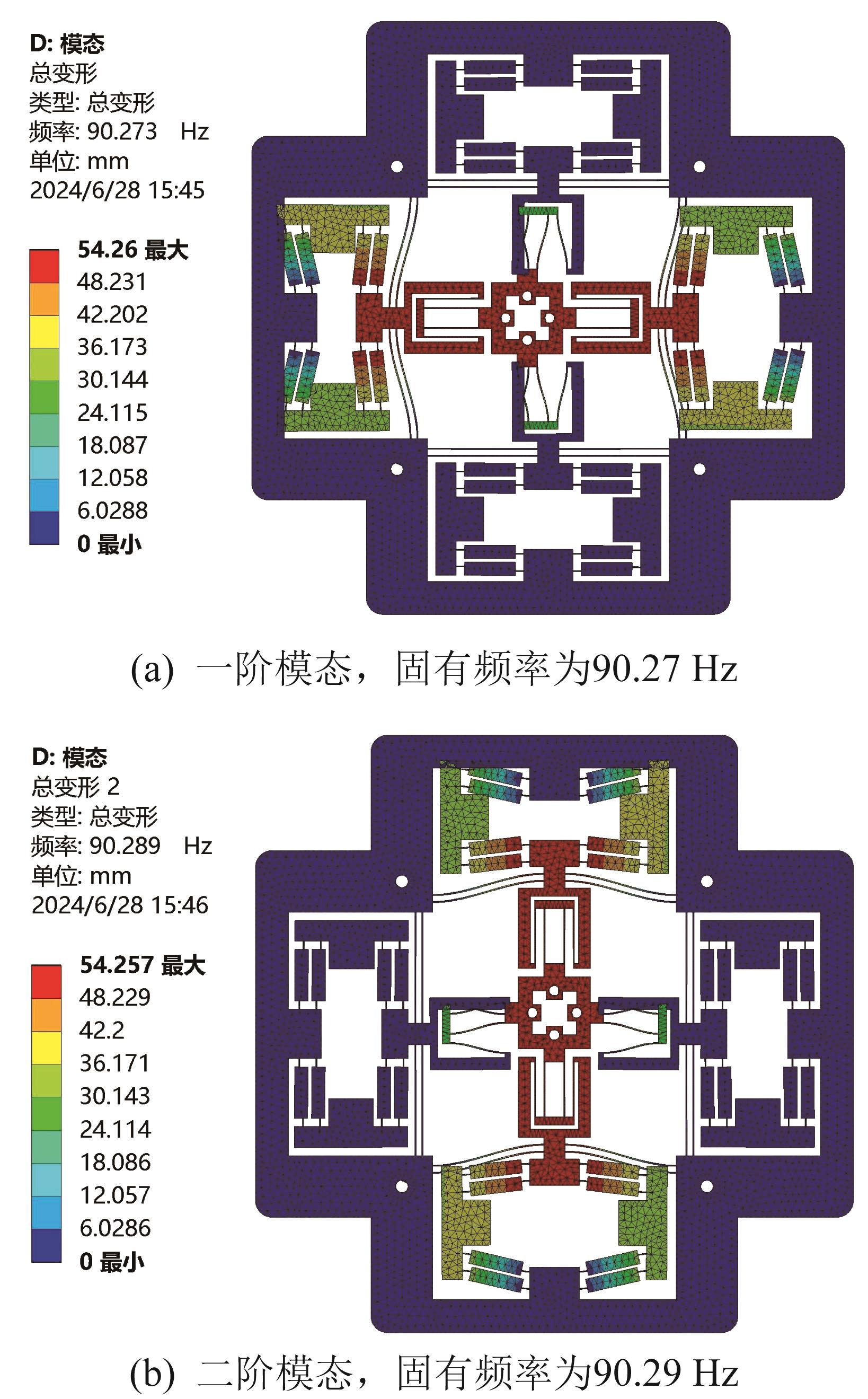
Abstract In order to solve the problems of small displacement magnification, low output stiffness and excessive motion coupling displacement of flexible precision positioning platform, a two-dimensional precision positioning platform based on piezoelectric ceramic drive is proposed. Firstly, the statics modeling for the precision positioning platform was carried out by using the module method, elastic beam theory and flexibility matrix method, and the dynamics modeling was conducted by using the Lagrange equation. Then, the finite element simulation on the displacement magnification, output stiffness, coupling displacement and natural frequency of the precision positioning platform was carried out by ANSYS Workbench software. Finally, the performance parameters of the precision positioning platform were tested by constructing an experimental device, and comparative analyses were conducted with finite element simulation results and theoretical calculation results. The simulation and experimental results verified the accuracy of the statics model and dynamics model of the precision positioning platform, which showed that the designed precision positioning platform had advantages of large displacement magnification, high output stiffness and strong decoupling performance. The research results provide some theoretical guidance for the flexible precision positioning platform to realize large stroke displacement output and excellent decoupling capability.
|
|
Received: 05 July 2024
Published: 06 May 2025
|
|
|
|
Corresponding Authors:
Xijing ZHU
E-mail: 571330085@qq.com;zxj161501@163.com
|
| About author: DU J, ZHU X J, LI J. Design and analysis of two-dimensional precision positioning platform based on piezoelectric ceramic drive[J]. Chinese Journal of Engineering Design, 2025, 32(2): 199-207. |
基于压电陶瓷驱动的二维精密定位平台设计及分析
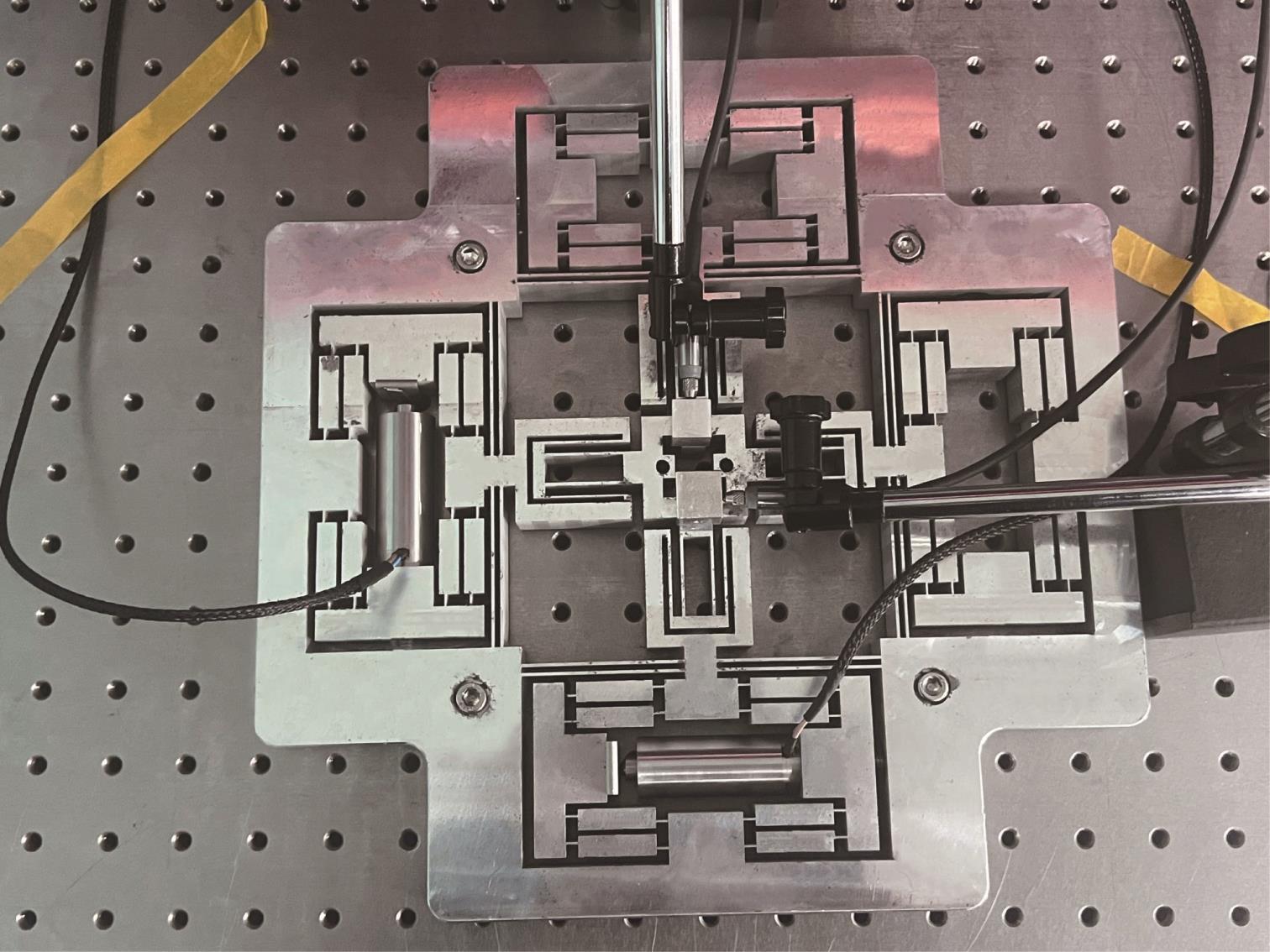
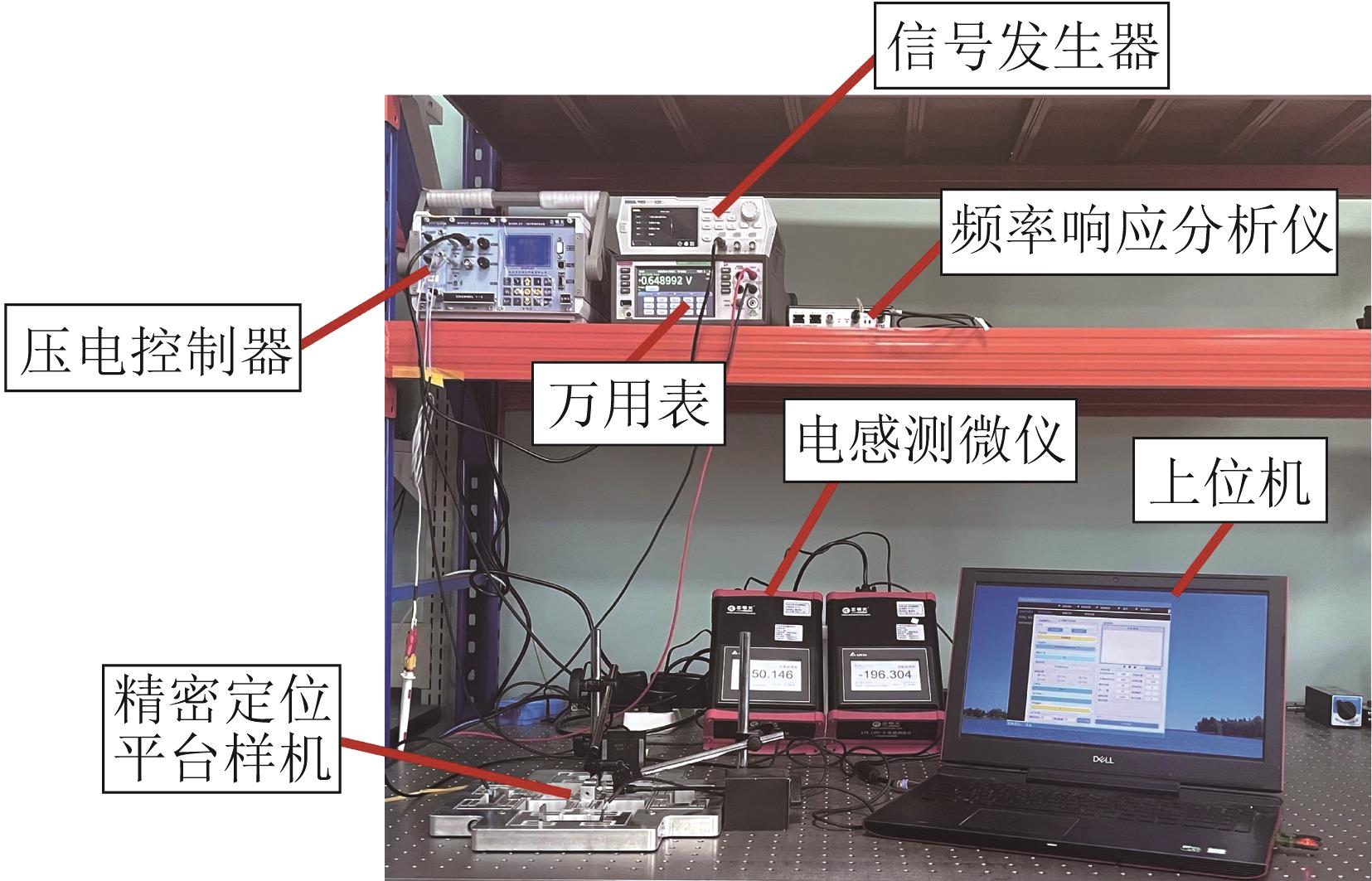
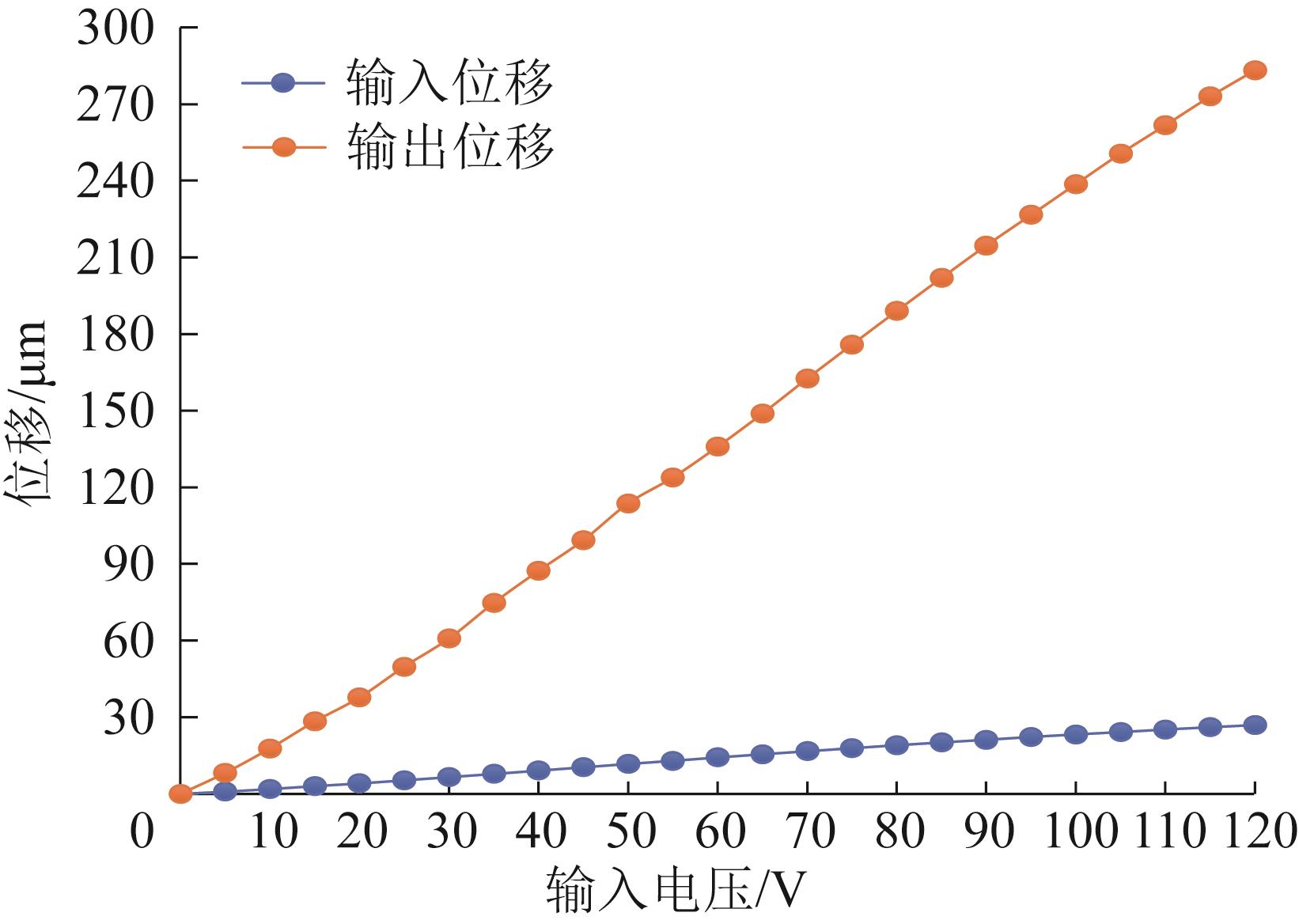
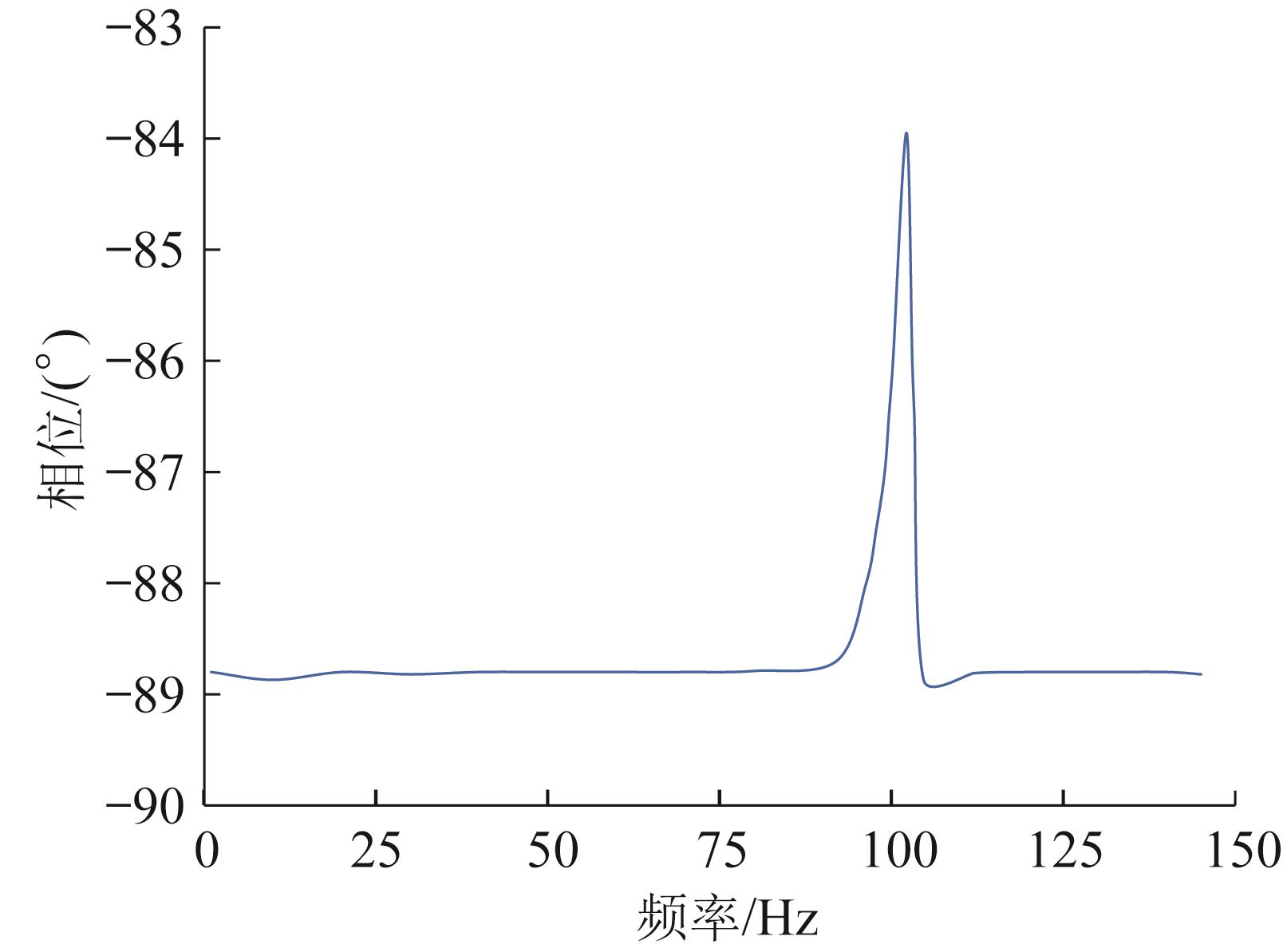
为解决柔性精密定位平台位移放大倍数小、输出刚度低以及运动耦合位移过高的问题,提出了一种基于压电陶瓷驱动的二维精密定位平台。首先,利用模块法、弹性梁理论及柔度矩阵法对精密定位平台进行了静力学建模,并利用拉格朗日方程对其进行了动力学建模。然后,采用ANSYS Workbench软件对精密定位平台的位移放大倍数、输出刚度、耦合位移和固有频率进行了有限元仿真。最后,通过搭建精密定位平台实验装置来测试其性能参数,并与有限元仿真结果和理论计算结果进行了对比分析。仿真与实验结果验证了精密定位平台静力学模型及动力学模型的准确性,表明所设计的精密定位平台具有位移放大倍数大、输出刚度高及解耦性能强的优点。研究结果为柔性精密定位平台实现大行程位移输出和良好的解耦能力提供了一定的理论指导。
关键词:
精密定位平台,
有限元仿真,
固有频率,
输出刚度
|
|
| [1] |
XU Q S, TAN K K. Advanced control of piezoelectric micro-/nano-positioning systems[M]. Cham: Springer, 2015.
|
|
|
| [2] |
高福天. 桥式杠杆放大机构的设计、优化及控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2019.
GAO F T. Design, optimization and control of abridge-lever-type amplifier[D]. Harbin: Harbin Institute of Technology, 2019.
|
|
|
| [3] |
GALLEGO J A, HERDER J. Classification for literature on compliant mechanisms: a design methodology based approach[C]//ASME 2009 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. San Diego, California, Aug. 30-Sep. 2, 2009.
|
|
|
| [4] |
李天翼. 二自由度解耦大行程微纳定位平台设计[D]. 杭州: 杭州电子科技大学, 2019.
LI T Y. Design of two degree of freedom decoupled micro-nano positioning stage with large workspace[D]. Hangzhou: Hangzhou Dianzi University, 2019.
|
|
|
| [5] |
TANG H, LI Y M. Design, analysis, and test of a novel 2-DOF nanopositioning system driven by dual mode[J]. IEEE Transactions on Robotics, 2013, 29(3): 650-662.
|
|
|
| [6] |
LI Y M, XU Q S. Design and analysis of a totally decoupled flexure-based XY parallel micromanipulator[J]. IEEE Transactions on Robotics, 2009, 25(3): 645-657.
|
|
|
| [7] |
LING M X, CAO J Y, JIANG Z, et al. Optimal design of a piezo-actuated 2-DOF millimeter-range monolithic flexure mechanism with a pseudo-static model[J]. Mechanical Systems and Signal Processing, 2019, 115: 120-131.
|
|
|
| [8] |
张宪民, 朱本亮, 李海, 等. 柔顺精密定位与操作机构研究进展[J]. 机械工程学报, 2023, 59(19): 24-43. doi:10.3901/jme.2023.19.024
ZHANG X M, ZHU B L, LI H, et al. Recent advances in compliant precision positioning and manipulating mechanisms[J]. Journal of Mechanical Engineering, 2023, 59(19): 24-43.
doi: 10.3901/jme.2023.19.024
|
|
|
| [9] |
LING M X, WANG J L, WU M X, et al. Design and modeling of an improved bridge-type compliant mechanism with its application for hydraulic piezo-valves[J]. Sensors and Actuators A: Physical, 2021, 324: 112687.
|
|
|
| [10] |
CHOI K B, LEE J J, KIM G H, et al. Amplification ratio analysis of a bridge-type mechanical amplification mechanism based on a fully compliant model[J]. Mechanism and Machine Theory, 2018, 121: 355-372.
|
|
|
| [11] |
卢倩, 黄卫清, 孙梦馨. 基于柔度比优化设计杠杆式柔性铰链放大机构[J]. 光学 精密工程, 2016, 24(1): 102-111. doi:10.3788/ope.20162401.0102
LU Q, HUANG W Q, SUN M X. Optimization design of amplification mechanism for level flexure hinge based on compliance ratio[J]. Optics and Precision Engineering, 2016, 24(1): 102-111.
doi: 10.3788/ope.20162401.0102
|
|
|
| [12] |
WU H T, LAI L J, ZHANG L Q, et al. A novel compliant XY micro-positioning stage using bridge-type displacement amplifier embedded with Scott-Russell mechanism[J]. Precision Engineering, 2022, 73: 284-295.
|
|
|
| [13] |
QIN Y D, SHIRINZADEH B, ZHANG D W, et al. Design and kinematics modeling of a novel 3-DOF monolithic manipulator featuring improved Scott-Russell mechanisms[J]. Journal of Mechanical Design, 2013, 135(10): 101004.
|
|
|
| [14] |
PAN B, ZHAO H Z, ZHAO C X, et al. Nonlinear characteristics of compliant bridge-type displacement amplification mechanisms[J]. Precision Engineering, 2019, 60: 246-256.
|
|
|
| [15] |
KOSEKI Y, TANIKAWA T, KOYACHI N, et al. Kinematic analysis of a translational 3-DOF micro-parallel mechanism using the matrix method[J]. Advanced Robotics, 2002, 16(3): 251-264.
|
|
|
| [16] |
赵建国. 基于卡氏第二定理与弹性梁理论的二维柔顺定位平台力学性能研究[D]. 上海: 上海大学, 2020.
ZHAO J G. Research on mechanical properties of Castigliano's second theorem and elastic beam theory based 2-DOF compliant positioning stage[D]. Shanghai: Shanghai University, 2020.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|