| Robotic and Mechanism Design |
|


|
|
|
| Design and analysis of three-degree-of-freedom large-stroke flexible tip-tilt stage driven by voice coil motor |
Zhihao XU1( ),Xiaowei LU2,Yuxin XIE1,Leijie LAI1() ),Xiaowei LU2,Yuxin XIE1,Leijie LAI1() |
1.School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China
2.Holley Technology Ltd. , Hangzhou 310023, China |
|
|
|
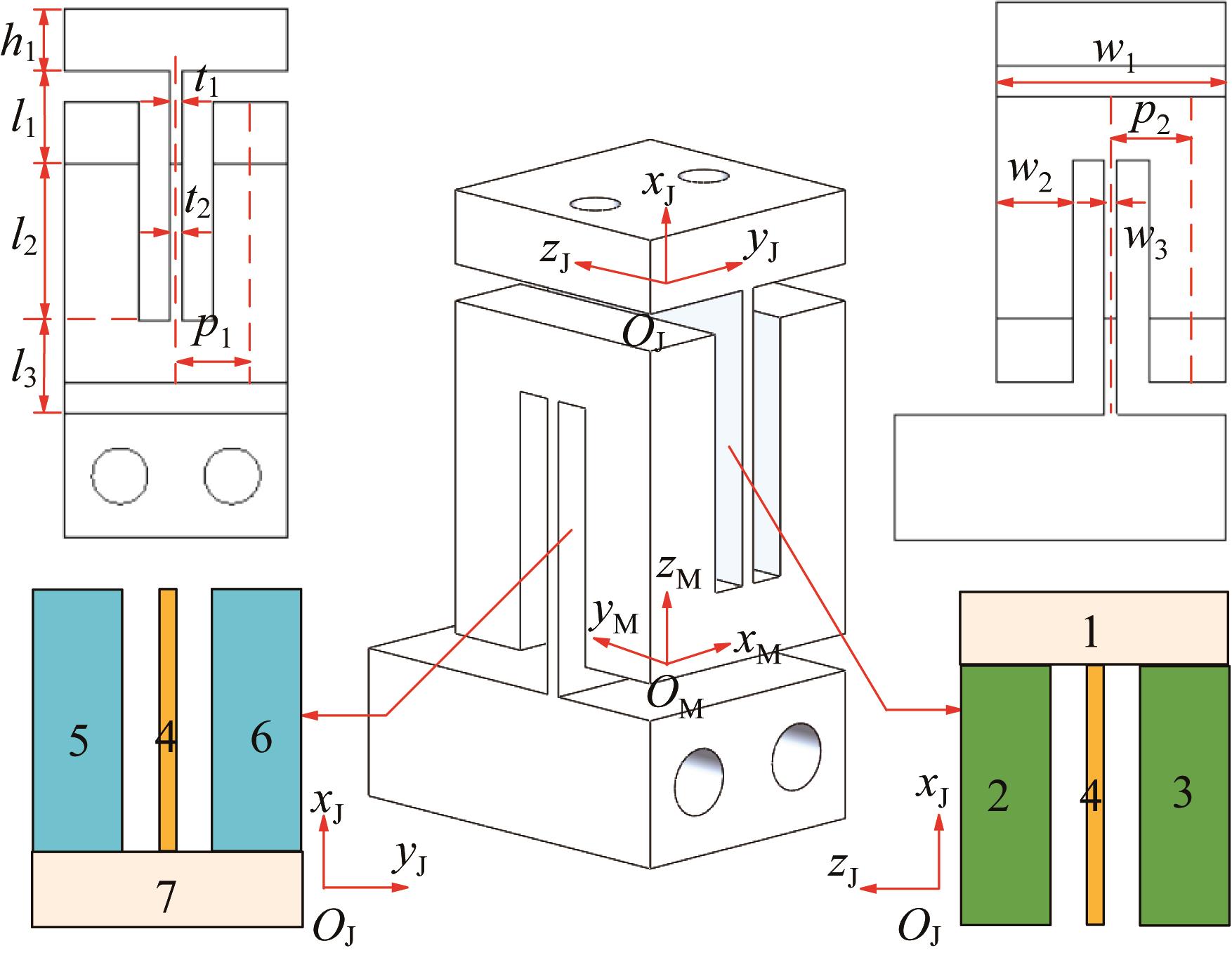
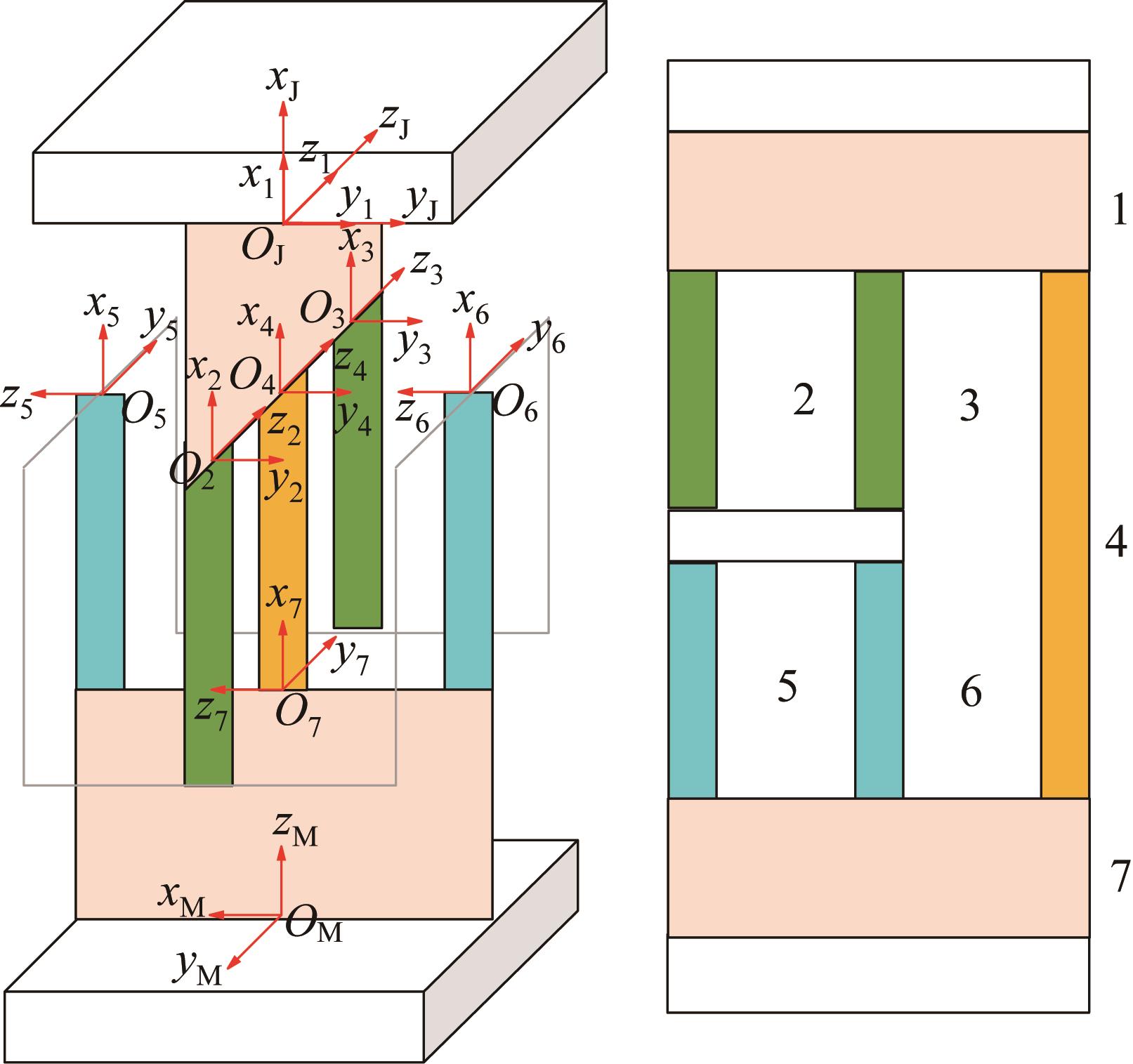
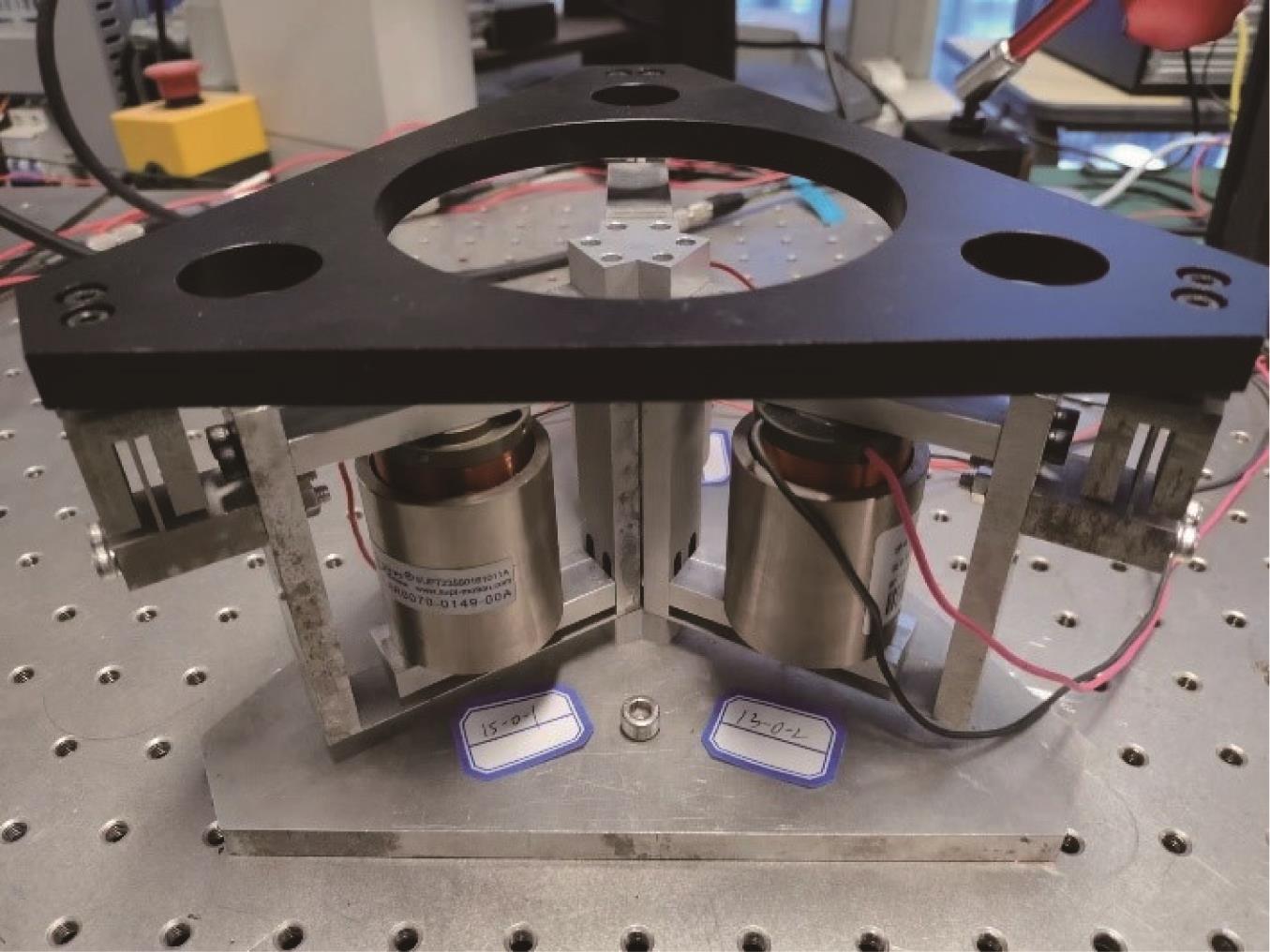
Abstract In order to solve the problem that the traditional piezoelectric-driven tip-tilt stage cannot adapt to many millimeter-level large-stroke application scenarios due to its small stroke, a three-degree-of-freedom large-stroke flexible tip-tilt stage driven by voice coil motor is designed, and its compliance modeling and performance testing are carried out. Firstly, the structural configuration of the three-degree-of-freedom large-stroke flexible tip-tilt stage was introduced, which included three sets of 120° uniformly arranged vertical driving chains, and the motion decoupling of each driving chain and the linear guidance of the motor rotor were achieved by using flexible spherical hinges and parallelogram mechanisms. At the same time, the kinematics equation of the dynamic platform of the tip-tilt stage was established according to the geometric relationship of each driving chain. Then, the compliance matrix method was used to derive the compliance analytical models for the flexible spherical hinge, the driving chain and the overall tip-tilt stage. Subsequently, the accuracy of the derived compliance analytical model was verified through the statics finite element simulation analysis for the tip-tilt stage. Finally, a tip-tilt stage testing system was built to measure its maximum stroke, as well as the translational compliance along the Z-axis and the rotational compliance around the X and Y axes, so as to verify the effectiveness and rationality of the structural design of the tip-tilt stage and the derived compliance analytical model. The results showed that the relative error between the calculation results of the compliance analytical model and the finite element simulation results, as well as the experimental results, was within 10%. The maximum stroke range of the tip-tilt stage was ±0.054 3 rad×±0.047 2 rad×±4.45 mm, which had the advantages of large-stroke and compact structure. The designed tip-tilt stage can be used in various situations that require large-stroke spatial positioning, demonstrating broad application prospects.
|
|
Received: 30 January 2024
Published: 04 March 2025
|
|
|
|
Corresponding Authors:
Leijie LAI
E-mail: hankxu99@163.com;lailj@sues.edu.cn
|
音圈电机驱动的三自由度大行程柔性偏摆台设计与分析
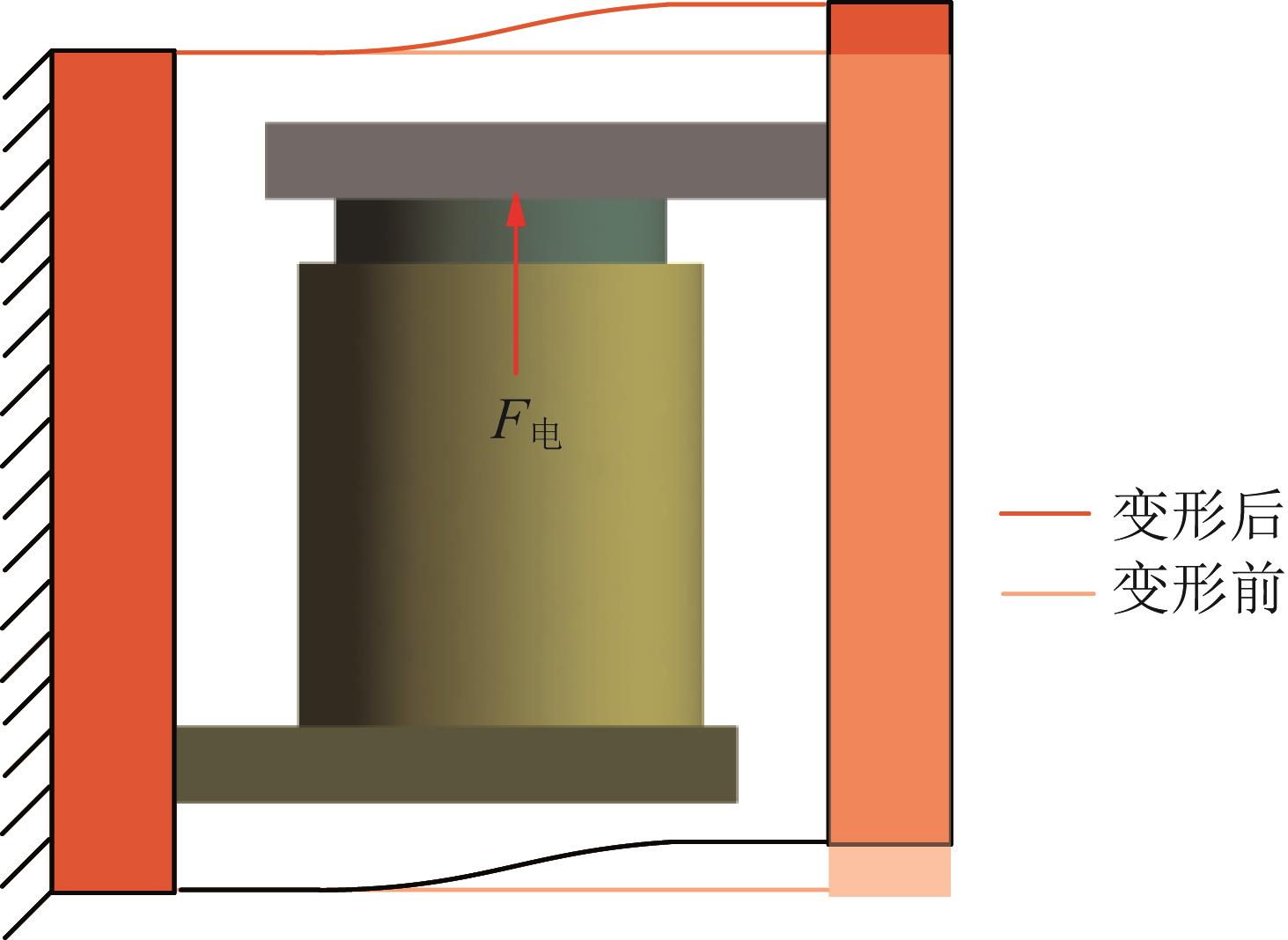
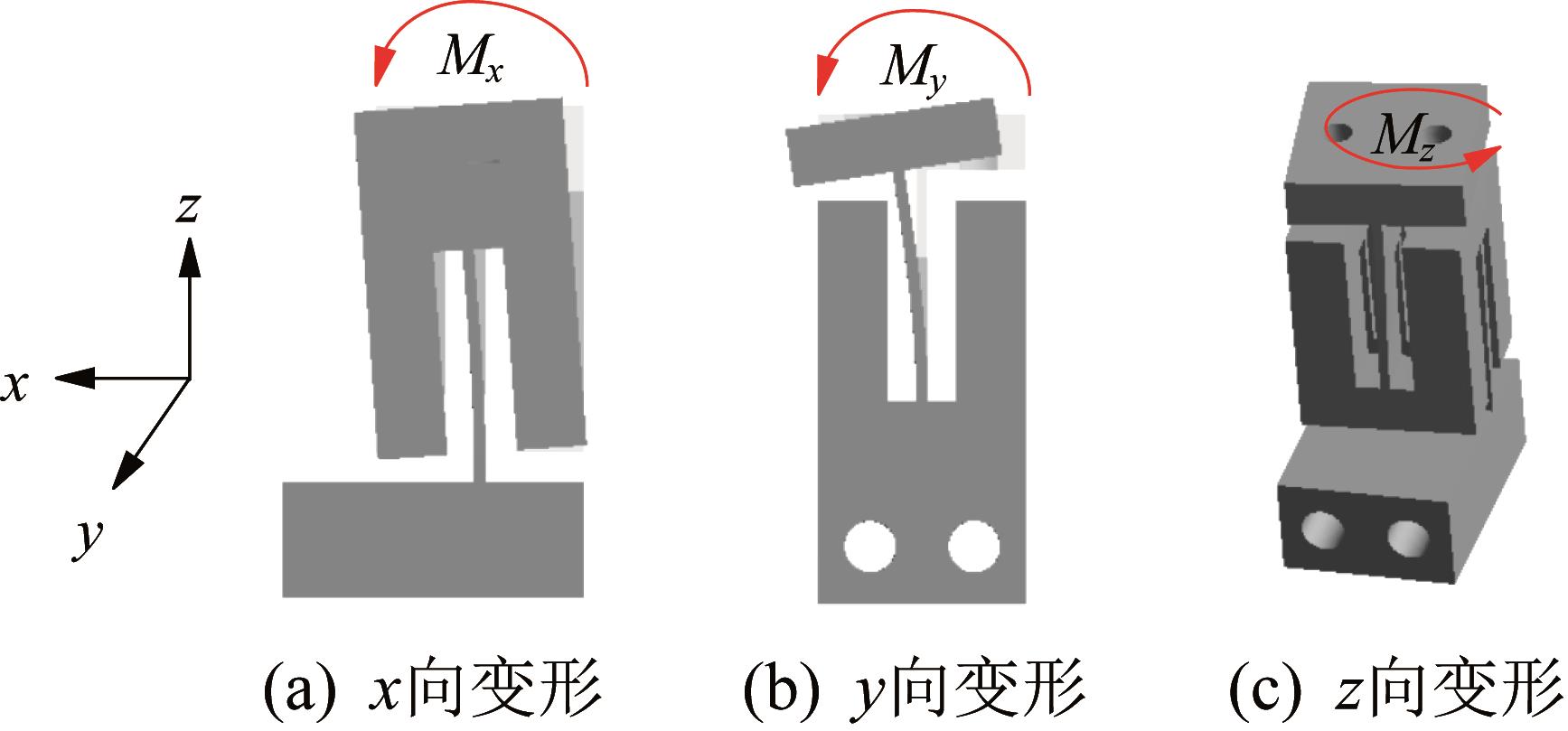
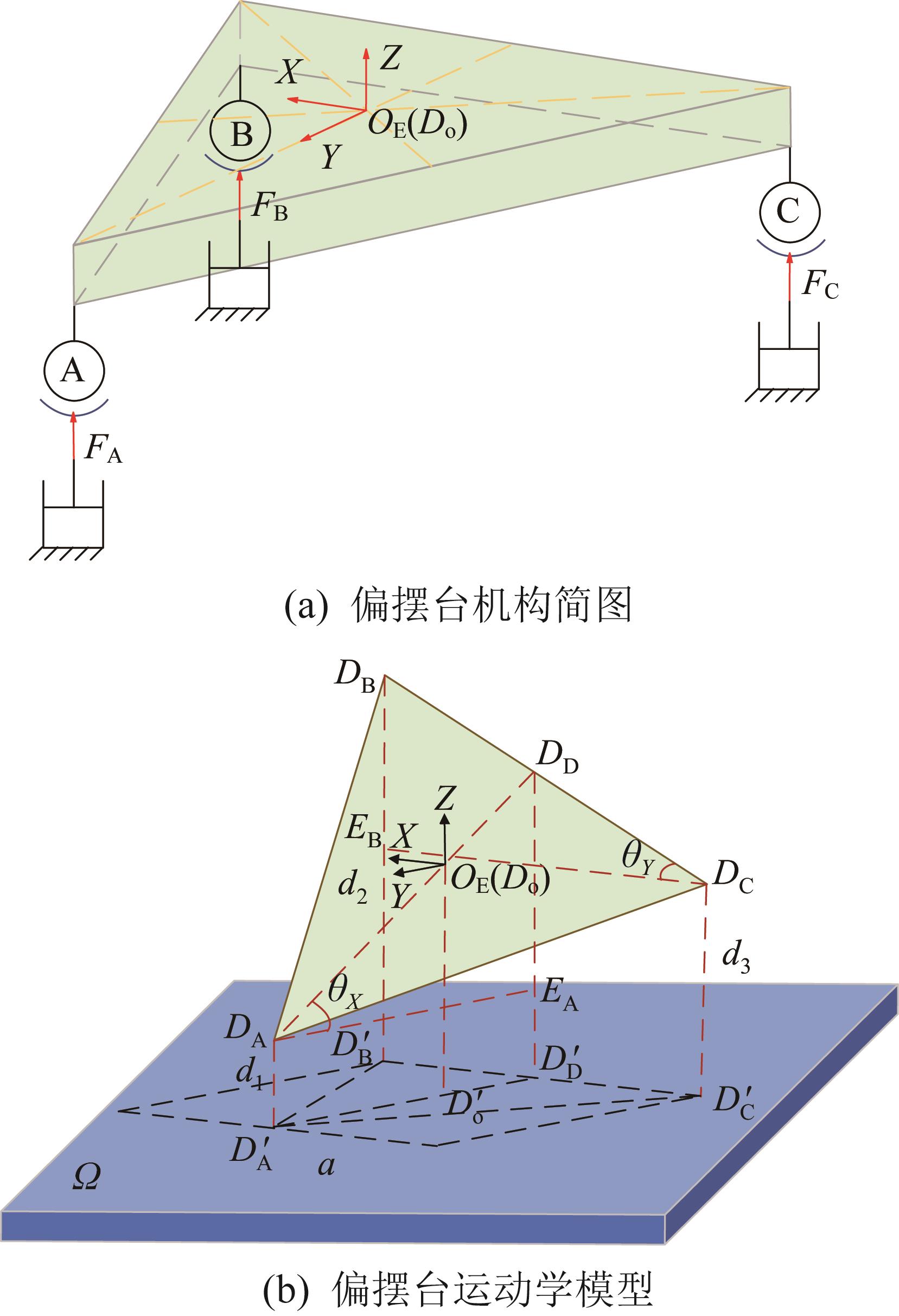
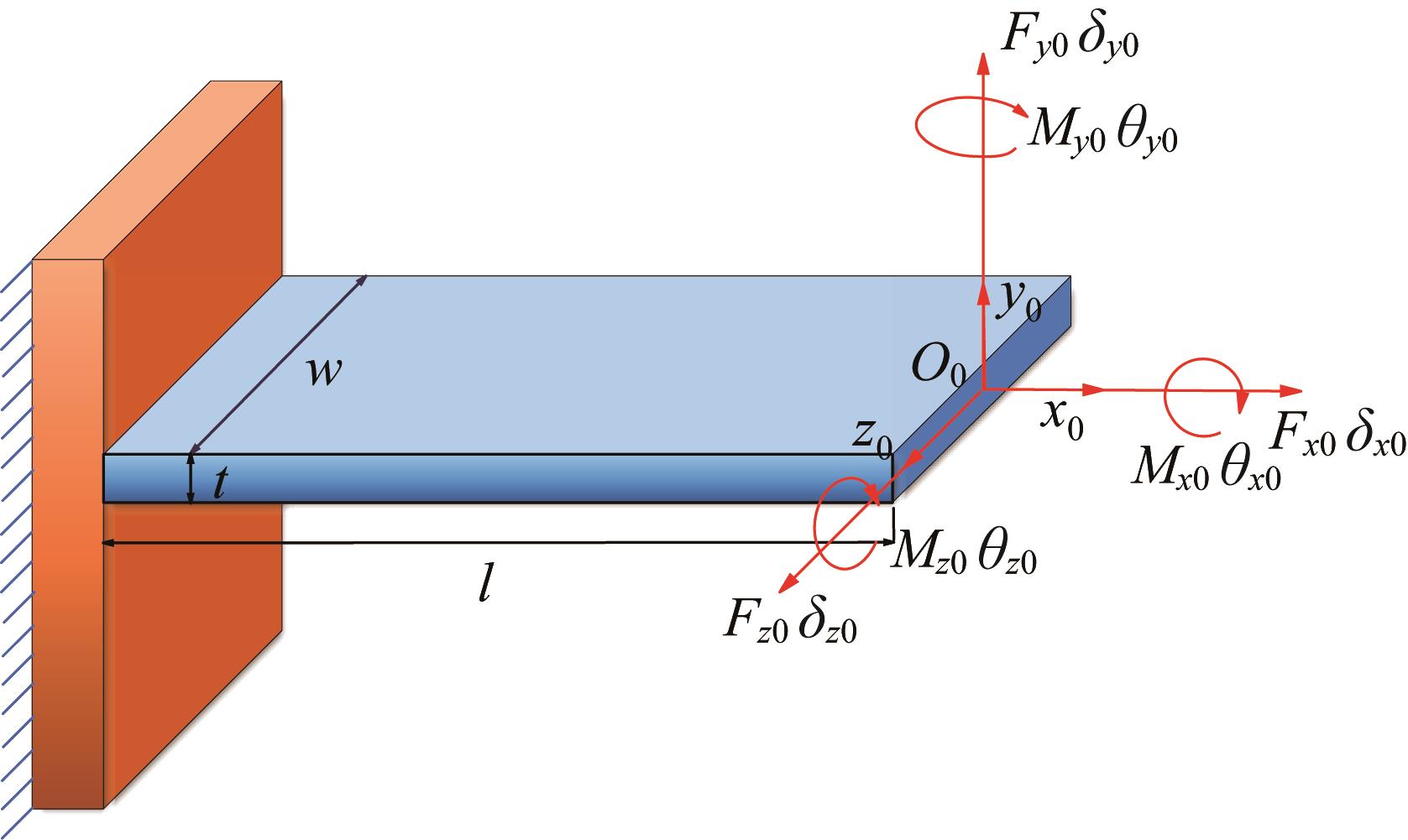
为解决传统压电驱动偏摆台因行程较小而无法适应诸多毫米级大行程应用场景的问题,设计了一种音圈电机驱动的三自由度大行程柔性偏摆台,并对其进行了柔度建模与性能测试。首先,介绍了三自由度大行程柔性偏摆台的结构构型,该构型包含3组呈120°均匀排布的垂直驱动支链,并利用柔性球铰和平行四边形机构实现各驱动支链的运动解耦和电机动子的直线导向;同时,根据各驱动支链的几何关系建立了偏摆台动平台的运动学方程。然后,利用柔度矩阵法推导了柔性球铰、驱动支链和整个偏摆台的柔度解析模型。接着,通过对偏摆台进行静力学有限元仿真分析,验证了所推导的柔度解析模型的准确性。最后,通过搭建偏摆台测试系统来测量偏摆台的最大行程以及沿Z轴的平移柔度和绕X、Y轴的旋转柔度,验证了偏摆台结构设计以及所推导柔度解析模型的有效性和合理性。结果表明:柔度解析模型计算结果与有限元仿真结果、实测结果的相对误差均在10%以内;偏摆台的最大行程范围为±0.054 3 rad×±0.047 2 rad×±4.45 mm,具有行程大、结构紧凑等优点。所设计的偏摆台适用于多种需要大行程空间定位的场景,具有广阔的应用前景。
关键词:
偏摆台,
大行程,
柔度,
音圈电机,
柔性球铰,
有限元仿真
|
|
| [1] |
范大鹏, 谭若愚. 快速反射镜中柔顺传动机构应用与研究现状[J]. 中国机械工程, 2020, 31(24): 2899-2909.
FAN D P, TAN R Y. Applications and research status of compliant transmission mechanisms in fast-steering mirrors[J]. China Mechanical Engineering, 2020, 31(24): 2899-2909.
|
|
|
| [2] |
RASOANARIVO F, DUMUR D, RODRIGUEZ-AYERBE P. Improving SLM additive manufacturing operation precision with H-infinity controller structure[J]. CIRP Journal of Manufacturing Science and Technology, 2021, 33: 82-90.
|
|
|
| [3] |
LI X, LIU B, MEI X S, et al. Development of an in situ laser machining system using a three-dimensional galvanometer scanner[J]. Engineering, 2020, 6(1): 68-76.
|
|
|
| [4] |
胡意立, 胡影, 李建平, 等. 具有“前进-前进” 运动模式的惯性压电驱动器[J]. 光学精密工程, 2021, 29(6): 1356. doi:10.37188/ope.20212906.1356
HU Y L, HU Y, LI J P, et al. Piezoelectric inertial actuator with “forward-forward” motion mode[J]. Optics and Precision Engineering, 2021, 29(6): 1356.
doi: 10.37188/ope.20212906.1356
|
|
|
| [5] |
YAN L L, WANG J R, LIANG T W, et al. A dual-mode stick-slip piezoelectric actuator imitating mantis forefoot[J]. International Journal of Mechanical Sciences, 2024, 266: 108985.
|
|
|
| [6] |
WEI F L, WANG X L, DONG J S, et al. Development of a three-degree-of-freedom piezoelectric actuator[J]. Review of Scientific Instruments, 2023, 94(2): 025001.
|
|
|
| [7] |
CHEN Y Z, LAI L J, FANG Y, et al. Voice coil motor-driven multi-DOF compliant parallel micropositioning stage based on a large range beam-based spherical hinge and fully symmetrical layout[J]. Journal of Micromechanics and Microengineering, 2023, 33(9): 095009.
|
|
|
| [8] |
WANG L N, WANG Z S, WANG F C, et al. Robust finite-time adaptive control for high performance voice coil motor-actuated fast steering mirror[J]. Review of Scientific Instruments, 2022, 93(12): 125003.
|
|
|
| [9] |
HAN M X, LIU Y S, LIAO Y T, et al. Investigation on the modeling and dynamic characteristics of a novel hydraulic proportional valve driven by a voice coil motor[J]. Strojniški Vestnik: Journal of Mechanical Engineering, 2021, 67(5): 223-234.
|
|
|
| [10] |
于靖军, 裴旭, 毕树生, 等. 柔性铰链机构设计方法的研究进展[J]. 机械工程学报, 2010, 46(13): 2-13. doi:10.3901/jme.2010.13.002
YU J J, PEI X, BI S S, et al. State-of-arts of design method for flexure mechanisms[J]. Journal of Mechanical Engineering, 2010, 46(13): 2-13.
doi: 10.3901/jme.2010.13.002
|
|
|
| [11] |
HAN W W, SHAO S B, ZHANG S W, et al. Design and modeling of decoupled miniature fast steering mirror with ultrahigh precision[J]. Mechanical Systems and Signal Processing, 2022, 167: 108521.
|
|
|
| [12] |
WANG L, LIU X L, LIANG S N, et al. Design and control of a fast steering mirror based on flexible supports and piezoelectric ceramic actuators[J]. Applied Optics, 2023, 62(27): 7263-7269.
|
|
|
| [13] |
汪奎, 辛宏伟, 曹乃亮, 等. 空间相机快速反射镜的两轴柔性支撑结构设计[J]. 红外与激光工程, 2019, 48(12): 418001. doi:10.3788/irla201948.1214005
WANG K, XIN H W, CAO N L, et al. Design of two-axis flexible support structure for fast steering mirror in space cameras[J]. Infrared and Laser Engineering, 2019, 48(12): 418001.
doi: 10.3788/irla201948.1214005
|
|
|
| [14] |
徐宁. 基于柔性机构的快速反射镜研究[D]. 长春: 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2018.
XU N. Research on fast steering mirror based on compliant mechanism[D]. Changchun: University of Chinese Academy of Sciences (Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences), 2018.
|
|
|
| [15] |
谢超, 陈云壮, 石光楠, 等. 正交簧片型大行程柔性球铰设计及柔度分析[J]. 工程设计学报, 2023, 30(5): 626-633.
XIE C, CHEN Y Z, SHI G N, et al. Design and compliance analysis of large stroke flexible ball hinge with orthogonal reeds[J]. Chinese Journal of Engineering Design, 2023, 30(5): 626-633.
|
|
|
| [16] |
司马津甫, 赖磊捷, 李朋志, 等. 三自由度压电偏摆台耦合迟滞模型建模与逆补偿[J]. 光学精密工程, 2023, 31(20): 2964-2974.
SIMA J F, LAI L J, LI P Z, et al. Coupled hysteresis model and its inverse compensation for three-degree-of-freedom tip-tilt-piston piezoelectric stage[J]. Optics and Precision Engineering, 2023, 31(20): 2964-2974.
|
|
|
| [17] |
WU H T, LAI L J, ZHANG L Q, et al. A novel compliant XY micro-positioning stage using bridge-type displacement amplifier embedded with Scott-Russell mechanism[J]. Precision Engineering, 2022, 73: 284-295.
|
|
|
| [18] |
赵宏伟, 吴博达, 曹殿波, 等. 直角柔性铰链的力学特性[J]. 纳米技术与精密工程, 2007(2): 143-147.
ZHAO H W, WU B D, CAO D B, et al. Mechanical performance of right-angle flexure hinge[J]. Nanotechnology and Precision Engineering, 2007(2): 143-147.
|
|
|
| [19] |
AL-JODAH A, SHIRINZADEH B, GHAFARIAN M, et al. Modeling and a cross-coupling compensation control methodology of a large range 3-DOF micropositioner with low parasitic motions[J]. Mechanism and Machine Theory, 2021, 162: 104334.
|
|
|
| [20] |
陈云壮, 赖磊捷, 李朋志, 等. 全簧片式空间大行程并联柔性微定位平台及其轨迹控制[J]. 光学精密工程, 2023, 31(18): 2675-2686. doi:10.37188/ope.20233118.2675
CHEN Y Z, LAI L J, LI P Z, et al. Full leaf-spring type spatial large-stroke parallel flexure micro-positioning stage and trajectory control[J]. Optics and Precision Engineering, 2023, 31(18): 2675-2686.
doi: 10.37188/ope.20233118.2675
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|