| 机器人与机构设计 |
|


|
|
|
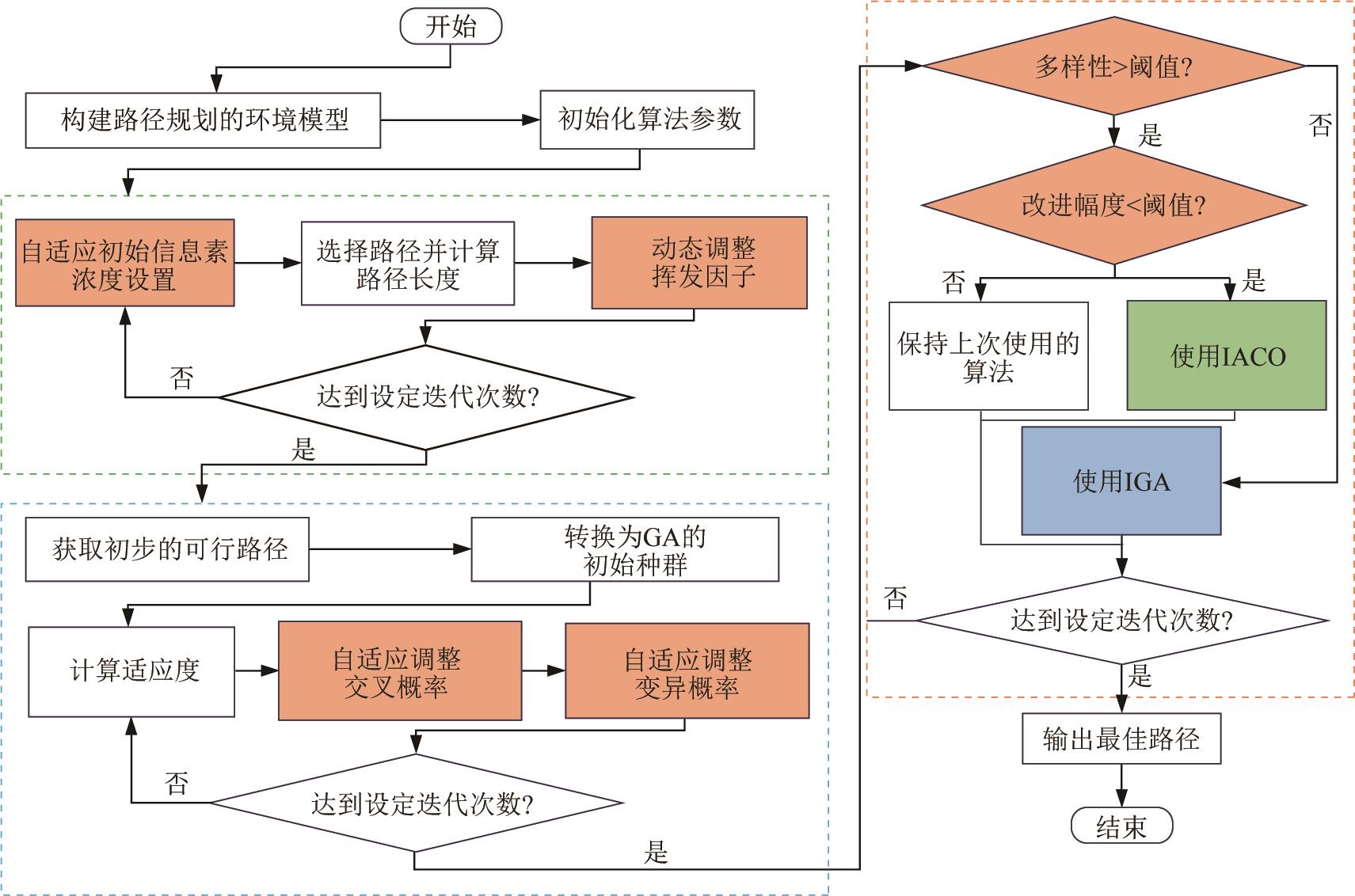
| 动态融合蚁群算法与遗传算法的路径规划方法研究 |
车健波1( ),唐东林1(),何媛媛1,2,胡远遥1,卢炳盛1,张俊辉1 ),唐东林1(),何媛媛1,2,胡远遥1,卢炳盛1,张俊辉1 |
1.西南石油大学 机电工程学院,四川 成都 610500
2.四川省特种设备检验研究院,四川 成都 610000 |
|
| Research on path planning method based on dynamic fusion of ant colony optimization and genetic algorithm |
| Jianbo CHE1(),Donglin TANG1(),Yuanyuan HE1,2,Yuanyao HU1,Bingsheng LU1,Junhui ZHANG1 |
1.School of Mechanical and Electrical Engineering, Southwest Petroleum University, Chengdu 610500, China
2.Sichuan Special Equipment Inspection Institute, Chengdu 610000, China |
引用本文:
车健波,唐东林,何媛媛,胡远遥,卢炳盛,张俊辉. 动态融合蚁群算法与遗传算法的路径规划方法研究[J]. 工程设计学报, 2025, 32(6): 789-802.
Jianbo CHE,Donglin TANG,Yuanyuan HE,Yuanyao HU,Bingsheng LU,Junhui ZHANG. Research on path planning method based on dynamic fusion of ant colony optimization and genetic algorithm[J]. Chinese Journal of Engineering Design, 2025, 32(6): 789-802.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.05.143
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I6/789
|
| [1] |
崔衡, 马宗方, 宋琳, 等. 基于连续顶点分区的混凝土3D打印路径规划算法[J]. 工程设计学报, 2024, 31(3): 271-279.
CUI H, MA Z F, SONG L, et al. Path planning algorithm for concrete 3D printing based on continuous vertex partitioning[J]. Chinese Journal of Engineering Design, 2024, 31(3): 271-279.
|
| [2] |
WONGPIROMSARN T, KALLMANN M, KOLLING A. Locally homotopic paths: ensuring consistent paths in hierarchical path planning[J]. IEEE Robotics and Automation Letters, 2024, 9(9): 7565-7572.
|
| [3] |
巩慧, 倪翠, 王朋, 等. 基于Dijkstra算法的平滑路径规划方法[J]. 北京航空航天大学学报, 2024, 50(2): 535-541.
GONG H, NI C, WANG P, et al. A smooth path planning method based on Dijkstra algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(2): 535-541.
|
| [4] |
LI Y C, DONG X Z, DING Q Q, et al. Improved A-STAR algorithm for power line inspection UAV path planning[J]. Energies, 2024, 17(21): 5364.
|
| [5] |
冯垚, 周志峰, 沈亦纯, 等. 基于改进RRT算法的避障路径规划[J]. 工程设计学报, 2023, 30(6): 707-716.
FENG Y, ZHOU Z F, SHEN Y C, et al. Obstacle avoidance path planning based on improved RRT algorithm[J]. Chinese Journal of Engineering Design, 2023, 30(6): 707-716.
|
| [6] |
赵红专, 张鑫, 张蓓聆, 等. 基于改进人工势场的智能车动态安全椭圆路径规划方法[J]. 山东大学学报(工学版), 2025, 55(3): 46-57.
ZHAO H Z, ZHANG X, ZHANG B L, et al. A dynamic safe elliptical path planning method for intelligent vehicles based on improved artificial potential field[J]. Journal of Shandong University (Engineering Science), 2025, 55(3): 46-57.
|
| [7] |
TANG X J, LI Y L. Research on path planning of self-driving vehicles based on improved DWA algorithm[J]. Applied Mathematics and Nonlinear Sciences, 2024, 9(1): 20231664.
|
| [8] |
LIU H B, ZHANG S, YANG X D. Overview of path planning algorithms[J]. Recent Patents on Engineering, 2024, 18(7): 76-89.
|
| [9] |
GU G Q, LI H T, ZHAO C S. A multi-strategy enhanced marine predator algorithm for global optimization and UAV swarm path planning[J]. IEEE Access, 2024, 12: 112095-112115.
|
| [10] |
ZHOU Q, LIAN Y, WU J Y, et al. An optimized Q-Learning algorithm for mobile robot local path planning[J]. Knowledge-Based Systems, 2024, 286: 111400.
|
| [11] |
WANG F, ZHAO L, BAI Y. Path planning for unmanned surface vehicles based on modified artificial fish swarm algorithm with local optimizer[J]. Mathematical Problems in Engineering, 2022, 2022(1): 1283374.
|
| [12] |
王芸. 基于模拟退火算法的末端车载无人机物流配送路径规划研究[J]. 自动化与仪器仪表, 2025(2): 247-251.
WANG Y. Research on the logistics and distribution route planning of terminal on-board UAV based on simulated annealing algorithm[J]. Automation & Instrumentation, 2025(2): 247-251.
|
| [13] |
XUE J, TAN Z F, DAI N N, et al. Particle swarm optimization bat algorithm path automatically planning research for police drones in hilly cities[J]. Journal of Systems Science and Information, 2024, 12(1): 125-144.
|
| [14] |
HONG J J, TSAI R G, CHEN X L, et al. U*: GA-based path planning algorithm for surface floating garbage cleaning robot[J]. Journal of Intelligent & Fuzzy Systems, 2024, 46(1): 837-850.
|
| [15] |
刘天湖, 赖嘉上, 孙伟龙, 等. 基于跳点优化蚁群算法的菠萝田间导航路径规划[J]. 农业机械学报, 2025, 56(4): 387-396.
LIU T H, LAI J S, SUN W L, et al. Navigation path planning of pineapple planting field based on jump point optimized ant colony algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2025, 56(4): 387-396.
|
| [16] |
田雅琴, 胡梦辉, 刘文涛, 等. 基于跳点搜索-遗传算法的自主移动机器人路径规划[J]. 工程设计学报, 2023, 30(6): 697-706.
TIAN Y Q, HU M H, LIU W T, et al. Path planning of autonomous mobile robot based on jump point search-genetic algorithm[J]. Chinese Journal of Engineering Design, 2023, 30(6): 697-706.
|
| [17] |
WAHAB M N AB, NAZIR A, KHALIL A, et al. Improved genetic algorithm for mobile robot path planning in static environments[J]. Expert Systems with Applications, 2024, 249(Part C): 123762.
|
| [18] |
CHONG Y, CHAI H Z, LI Y H, et al. Automatic recognition of geomagnetic suitability areas for path planning of autonomous underwater vehicle[J]. Marine Geodesy, 2021, 44(4): 287-305.
|
| [19] |
LI B J, WU G H, HE Y M, et al. An overview and experimental study of learning-based optimization algorithms for the vehicle routing problem[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(7): 1115-1138.
|
| [20] |
ZHENG X C, CAO J J, ZHANG Y L, et al. Optimized ant colony system algorithm for path planning in radiation environments[J]. Nuclear Engineering and Technology, 2025, 57(7): 103471.
|
| [21] |
HUO F C, ZHU S, DONG H L, et al. A new approach to smooth path planning of Ackerman mobile robot based on improved ACO algorithm and B-spline curve[J]. Robotics and Autonomous Systems, 2024, 175: 104655.
|
| [22] |
CHÂARI I, KOUBÂA A, TRIGUI S, et al. SmartPATH: an efficient hybrid ACO-GA algorithm for solving the global path planning problem of mobile robots[J]. International Journal of Advanced Robotic Systems, 2014, 11(7): 94.
|
| [23] |
NIU Q Y, FU Y, DONG X W. Omnidirectional AGV path planning based on improved genetic algorithm[J]. World Electric Vehicle Journal, 2024, 15(4): 166.
|
| [24] |
HENG H, RAHIMAN W. ACO-GA-based optimization to enhance global path planning for autonomous navigation in grid environments[J/OL]. IEEE Transactions on Evolutionary Computation, 2025: 1-15 (2025-02-18) [2025-04-23]. .
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|