[1]
LEE J U IEA, World energy outlook 2020
[J]. KEPCO Journal on Electric Power and Energy , 2021 , 7 (1 ): 25 - 30
[本文引用: 1]
[2]
CHEN X, LIU Y, WANG Q, et al Pathway toward carbon-neutral electrical systems in China by mid-century with negative CO2 abatement costs informed by high-resolution modeling
[J]. Joule , 2021 , 5 (10 ): 2715 - 2741
DOI:10.1016/j.joule.2021.10.006
[3]
XIE L, SINGH C, MITTER S K, et al Toward carbon-neutral electricity and mobility: is the grid infrastructure ready?
[J]. Joule , 2021 , 5 (8 ): 1908 - 1913
DOI:10.1016/j.joule.2021.06.011
[本文引用: 1]
[4]
POPOVICH N D, RAJAGOPAL D, TASAR E, et al Economic, environmental and grid-resilience benefits of converting diesel trains to battery-electric
[J]. Nature Energy , 2021 , 6 (11 ): 1017 - 1025
DOI:10.1038/s41560-021-00915-5
[本文引用: 1]
[5]
MAC KINNON M A, BROUWER J, SAMUELSEN S The role of natural gas and its infrastructure in mitigating greenhouse gas emissions, improving regional air quality, and renewable resource integration
[J]. Progress in Energy and Combustion Science , 2018 , 64 : 62 - 92
DOI:10.1016/j.pecs.2017.10.002
[6]
ZHAO Y, CAI Y, SONG Q Energy control of plug-in hybrid electric vehicles using model predictive control with route preview
[J]. IEEE/CAA Journal of Automatica Sinica , 2021 , 8 (12 ): 1948 - 1955
DOI:10.1109/JAS.2017.7510889
[本文引用: 1]
[7]
ZHUANG W, YE J, SONG Z, et al Comparison of semi-active hybrid battery system configurations for electric taxis application
[J]. Applied Energy , 2020 , 259 : 114171
DOI:10.1016/j.apenergy.2019.114171
[本文引用: 1]
[8]
何洪文, 孟祥飞 混合动力电动汽车能量管理技术研究综述
[J]. 北京理工大学学报 , 2022 , 42 (8 ): 773 - 783
[本文引用: 1]
HE Hongwen, MENG Xiangfei A review on energy management technology of hybrid electric vehicles
[J]. Transactions of Beijing Institute of Technology , 2022 , 42 (8 ): 773 - 783
[本文引用: 1]
[9]
TRAN D D, VAFAEIPOUR M, EL BAGHDADI M, et al Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: topologies and integrated energy management strategies
[J]. Renewable and Sustainable Energy Reviews , 2020 , 119 : 109596
DOI:10.1016/j.rser.2019.109596
[本文引用: 1]
[10]
KONG Y, XU N, LIU Q, et al A data-driven energy management method for parallel PHEVs based on action dependent heuristic dynamic programming (ADHDP) model
[J]. Energy , 2023 , 265 : 126306
DOI:10.1016/j.energy.2022.126306
[本文引用: 1]
[11]
DIMITRAKOPOULOS G, DEMESTICHAS P Intelligent transportation systems
[J]. IEEE Vehicular Technology Magazine , 2010 , 5 (1 ): 77 - 84
DOI:10.1109/MVT.2009.935537
[本文引用: 1]
[12]
HE H, MENG X, WANG Y, et al Deep reinforcement learning based energy management strategies for electrified vehicles: recent advances and perspectives
[J]. Renewable and Sustainable Energy Reviews , 2024 , 192 : 114248
DOI:10.1016/j.rser.2023.114248
[本文引用: 1]
[13]
LIU T, TAN W, TANG X, et al Driving conditions-driven energy management strategies for hybrid electric vehicles: a review
[J]. Renewable and Sustainable Energy Reviews , 2021 , 151 : 111521
DOI:10.1016/j.rser.2021.111521
[本文引用: 1]
[14]
GAN J, LI S, WEI C, et al Intelligent learning algorithm and intelligent transportation-based energy management strategies for hybrid electric vehicles: a review
[J]. IEEE Transactions on Intelligent Transportation Systems , 2023 , 24 (10 ): 10345 - 10361
DOI:10.1109/TITS.2023.3283010
[本文引用: 1]
[15]
SHEN P, ZHAO Z, GUO Q, et al Development of economic velocity planning algorithm for plug-in hybrid electric vehicle
[J]. IEEE Transactions on Intelligent Transportation Systems , 2022 , 23 (6 ): 5501 - 5513
DOI:10.1109/TITS.2021.3054732
[本文引用: 1]
[16]
EHSANI M, SINGH K V, BANSAL H O, et al State of the art and trends in electric and hybrid electric vehicles
[J]. Proceedings of the IEEE , 2021 , 109 (6 ): 967 - 984
DOI:10.1109/JPROC.2021.3072788
[本文引用: 1]
[17]
LUO D, JI W, HU X Parameter optimization and control strategy of hybrid electric vehicle transmission system based on improved GA algorithm
[J]. Processes , 2023 , 11 (5 ): 1554
DOI:10.3390/pr11051554
[本文引用: 1]
[18]
PAM A, BOUSCAYROL A, FIANI P, et al Comparison of different models for energy management strategy design of a parallel hybrid electric vehicle: impact of the rotating masses
[J]. IET Electrical Systems in Transportation , 2021 , 11 (1 ): 36 - 46
DOI:10.1049/els2.12003
[本文引用: 1]
[19]
ZHANG Y, ZHANG Y, AI Z, et al Energy optimal control of motor drive system for extending ranges of electric vehicles
[J]. IEEE Transactions on Industrial Electronics , 2021 , 68 (2 ): 1728 - 1738
DOI:10.1109/TIE.2019.2947841
[本文引用: 1]
[20]
ZENG T, ZHANG C, ZHANG Y, et al Optimization-oriented adaptive equivalent consumption minimization strategy based on short-term demand power prediction for fuel cell hybrid vehicle
[J]. Energy , 2021 , 227 : 120305
DOI:10.1016/j.energy.2021.120305
[本文引用: 1]
[21]
WANG W, XI J, ZHAO D Driving style analysis using primitive driving patterns with Bayesian nonparametric approaches
[J]. IEEE Transactions on Intelligent Transportation Systems , 2019 , 20 (8 ): 2986 - 2998
DOI:10.1109/TITS.2018.2870525
[本文引用: 1]
[22]
秦大同, 陈沫机, 曹宇航, 等 基于驾驶事件的驾驶风格分类与识别方法研究
[J]. 中国机械工程 , 2024 , 35 (9 ): 1534 - 1541
[本文引用: 1]
QIN Datong, CHEN Moji, CAO Yuhang, et al Research on driving style classification and recognition methods based on driving events
[J]. China Mechanical Engineering , 2024 , 35 (9 ): 1534 - 1541
[本文引用: 1]
[23]
HUANG X, TAN Y, HE X An intelligent multifeature statistical approach for the discrimination of driving conditions of a hybrid electric vehicle
[J]. IEEE Transactions on Intelligent Transportation Systems , 2011 , 12 (2 ): 453 - 465
DOI:10.1109/TITS.2010.2093129
[本文引用: 1]
[24]
AL-WREIKAT Y, SERRANO C, SODRÉ J R Driving behaviour and trip condition effects on the energy consumption of an electric vehicle under real-world driving
[J]. Applied Energy , 2021 , 297 : 117096
DOI:10.1016/j.apenergy.2021.117096
[本文引用: 1]
[25]
MEI P, KARIMI H R, OU L, et al Driving style classification and recognition methods for connected vehicle control in intelligent transportation systems: a review
[J]. ISA Transactions , 2025 , 158 : 167 - 183
DOI:10.1016/j.isatra.2025.01.033
[本文引用: 1]
[26]
QIU C, WAN X, WANG N, et al A novel regenerative braking energy recuperation system for electric vehicles based on driving style
[J]. Energy , 2023 , 283 : 129055
DOI:10.1016/j.energy.2023.129055
[本文引用: 1]
[27]
秦大同, 詹森, 曾育平, 等 基于驾驶风格识别的混合动力汽车能量管理策略
[J]. 机械工程学报 , 2016 , 52 (8 ): 162 - 169
DOI:10.3901/JME.2016.08.162
[本文引用: 1]
QIN Datong, ZHAN Sen, ZENG Yuping, et al Management strategy of hybrid electrical vehicle based on driving style recognition
[J]. Journal of Mechanical Engineering , 2016 , 52 (8 ): 162 - 169
DOI:10.3901/JME.2016.08.162
[本文引用: 1]
[28]
MOHAMMADNAZAR A, KHATTAK Z H, KHATTAK A J Assessing driving behavior influence on fuel efficiency using machine-learning and drive-cycle simulations
[J]. Transportation Research Part D: Transport and Environment , 2024 , 126 : 104025
DOI:10.1016/j.trd.2023.104025
[本文引用: 1]
[29]
LIN M, CHEN S, WANG W, et al Multi-feature fusion-based instantaneous energy consumption estimation for electric buses
[J]. IEEE/CAA Journal of Automatica Sinica , 2023 , 10 (10 ): 2035 - 2037
DOI:10.1109/JAS.2022.106010
[本文引用: 1]
[30]
赵佳伟, 胡明辉, 荣正璧, 等 驾驶风格对纯电动汽车能耗的影响
[J]. 重庆大学学报 , 2021 , 44 (12 ): 103 - 115
[本文引用: 1]
ZHAO Jiawei, HU Minghui, RONG Zhengbi, et al Effect of driving style on the energy consumption of an electric vehicle
[J]. Journal of Chongqing University , 2021 , 44 (12 ): 103 - 115
[本文引用: 1]
[31]
SHEN P, ZHAO Z, LI J, et al Development of a typical driving cycle for an intra-city hybrid electric bus with a fixed route
[J]. Transportation Research Part D: Transport and Environment , 2018 , 59 : 346 - 360
DOI:10.1016/j.trd.2018.01.032
[本文引用: 1]
[32]
SALIHU F, DEMIR Y K, DEMIR H G Effect of road slope on driving cycle parameters of urban roads
[J]. Transportation Research Part D: Transport and Environment , 2023 , 118 : 103676
DOI:10.1016/j.trd.2023.103676
[本文引用: 1]
[33]
MADHUSUDHANAN A K, NA X Effect of a traffic speed based cruise control on an electric vehicle’s performance and an energy consumption model of an electric vehicle
[J]. IEEE/CAA Journal of Automatica Sinica , 2020 , 7 (2 ): 386 - 394
DOI:10.1109/JAS.2020.1003030
[本文引用: 1]
[34]
JI Z, WANG T, SUN X, et al Driving condition recognition combined with stochastic prediction and machine learning and its application in energy management of medium fuel cell trucks
[J]. IEEE Transactions on Vehicular Technology , 2023 , 72 (12 ): 15502 - 15520
DOI:10.1109/TVT.2023.3290721
[本文引用: 1]
[35]
SAGAAMA I, KCHICHE A, TROJET W, et al. Impact of road gradient on electric vehicle energy consumption in real-world driving [C]// International Conference on Advanced Information Networking and Applications . Cham: Springer, 2020: 393–404.
[本文引用: 1]
[36]
JEONG J W, LEE J, LEE J, et al Comparison of energy consumption between hybrid and electric vehicles under real-world driving conditions
[J]. Journal of Power Sources , 2024 , 618 : 235190
DOI:10.1016/j.jpowsour.2024.235190
[本文引用: 1]
[37]
庞然, 简晓春, 孟雄, 等. 基于典型山地城市的轻型车比功率综合油耗模型[J]. 科学技术与工程, 2018, 18(6): 156–161.
[本文引用: 1]
PANG Ran, JIAN Xiaochun, MENG Xiong, et al. Comprehensive fuel consumption model of light vehicle specific power based on typical mountainous city [J]. Science Technology and Engineering . 2018, 18(6): 156–161.
[本文引用: 1]
[38]
WU X, FREESE D, CABRERA A, et al Electric vehicles’ energy consumption measurement and estimation
[J]. Transportation Research Part D: Transport and Environment , 2015 , 34 : 52 - 67
DOI:10.1016/j.trd.2014.10.007
[本文引用: 1]
[39]
LI B, ZHUANG W, ZHANG H, et al A comparative study of energy-oriented driving strategy for connected electric vehicles on freeways with varying slopes
[J]. Energy , 2024 , 289 : 129916
DOI:10.1016/j.energy.2023.129916
[本文引用: 1]
[40]
赵克刚, 何坤阳, 黎杰, 等 基于改进动态规划法的HEV多目标能量管理策略
[J]. 华南理工大学学报: 自然科学版 , 2022 , 50 (9 ): 138 - 148
[本文引用: 1]
ZHAO Kegang, HE Kunyang, LI Jie, et al Multi-objective energy management strategy of HEV based on improved dynamic programming method
[J]. Journal of South China University of Technology: Natural Science Edition , 2022 , 50 (9 ): 138 - 148
[本文引用: 1]
[41]
CHEN S, HU M, GUO S Fast dynamic-programming algorithm for solving global optimization problems of hybrid electric vehicles
[J]. Energy , 2023 , 273 : 127207
DOI:10.1016/j.energy.2023.127207
[本文引用: 1]
[42]
HU X, ZHENG Y, HOWEY D A, et al Battery warm-up methodologies at subzero temperatures for automotive applications: recent advances and perspectives
[J]. Progress in Energy and Combustion Science , 2020 , 77 : 100806
DOI:10.1016/j.pecs.2019.100806
[本文引用: 1]
[43]
SONG Z, PAN Y, CHEN H, et al Effects of temperature on the performance of fuel cell hybrid electric vehicles: a review
[J]. Applied Energy , 2021 , 302 : 117572
DOI:10.1016/j.apenergy.2021.117572
[本文引用: 1]
[44]
LI K, CHEN H, WU Y, et al A model-free combined energy and thermal management strategy for HEVs based on reinforcement-learning under low-temperature
[J]. IEEE Transactions on Intelligent Vehicles , 2025 , 10 (1 ): 373 - 388
DOI:10.1109/TIV.2024.3412921
[本文引用: 1]
[45]
LI K, CHEN H, HOU S, et al A novel energy management strategy for PHEV considering cabin heat demand under low temperature based on reinforcement learning
[J]. IEEE Transactions on Transportation Electrification , 2025 , 11 (1 ): 3062 - 3077
DOI:10.1109/TTE.2024.3434521
[本文引用: 1]
[46]
WANG P, LIU Q, XU N, et al Energy consumption estimation method of battery electric buses based on real-world driving data
[J]. World Electric Vehicle Journal , 2024 , 15 (7 ): 314
DOI:10.3390/wevj15070314
[本文引用: 1]
[47]
HU X, WANG P, HU Y, et al A stability-guaranteed and energy-conserving torque distribution strategy for electric vehicles under extreme conditions
[J]. Applied Energy , 2020 , 259 : 114162
DOI:10.1016/j.apenergy.2019.114162
[本文引用: 1]
[48]
ZHU Y, LI X, LIU Q, et al Review article: a comprehensive review of energy management strategies for hybrid electric vehicles
[J]. Mechanical Sciences , 2022 , 13 (1 ): 147 - 188
DOI:10.5194/ms-13-147-2022
[本文引用: 1]
[49]
WANG Z, HE H, PENG J, et al A comparative study of deep reinforcement learning based energy management strategy for hybrid electric vehicle
[J]. Energy Conversion and Management , 2023 , 293 : 117442
DOI:10.1016/j.enconman.2023.117442
[本文引用: 1]
[50]
ZHANG F, WANG L, COSKUN S, et al Energy management strategies for hybrid electric vehicles: review, classification, comparison, and outlook
[J]. Energies , 2020 , 13 (13 ): 3352
DOI:10.3390/en13133352
[本文引用: 1]
[51]
YANG Y, PEI H, HU X, et al Fuel economy optimization of power split hybrid vehicles: a rapid dynamic programming approach
[J]. Energy , 2019 , 166 : 929 - 938
DOI:10.1016/j.energy.2018.10.149
[本文引用: 1]
[52]
WU J, ZHANG Y, RUAN J, et al Rule and optimization combined real-time energy management strategy for minimizing cost of fuel cell hybrid electric vehicles
[J]. Energy , 2023 , 285 : 129442
DOI:10.1016/j.energy.2023.129442
[本文引用: 1]
[53]
ZHANG S, XIONG R Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming
[J]. Applied Energy , 2015 , 155 : 68 - 78
DOI:10.1016/j.apenergy.2015.06.003
[本文引用: 1]
[54]
CHAI H, ZHAO X, SHI P, et al MPC-based energy management with short-term driving condition prediction for a plug-in hybrid electric truck
[J]. Sustainable Energy & Fuels , 2023 , 7 (14 ): 3432 - 3446
[本文引用: 1]
[55]
DU G, ZOU Y, ZHANG X, et al Deep reinforcement learning based energy management for a hybrid electric vehicle
[J]. Energy , 2020 , 201 : 117591
DOI:10.1016/j.energy.2020.117591
[本文引用: 1]
[56]
FOTOUHI A, YUSOF R, RAHMANI R, et al A review on the applications of driving data and traffic information for vehicles’ energy conservation
[J]. Renewable and Sustainable Energy Reviews , 2014 , 37 : 822 - 833
DOI:10.1016/j.rser.2014.05.077
[本文引用: 1]
[57]
LIAO H, ZHOU Z, LIU N, et al Cloud-edge-device collaborative reliable and communication-efficient digital twin for low-carbon electrical equipment management
[J]. IEEE Transactions on Industrial Informatics , 2023 , 19 (2 ): 1715 - 1724
DOI:10.1109/TII.2022.3194840
[本文引用: 1]
[58]
MAHMUD D, HAJMOHAMED H, ALMENTHERI S, et al Integrating LLMs with ITS: recent advances, potentials, challenges, and future directions
[J]. IEEE Transactions on Intelligent Transportation Systems , 2025 , 26 (5 ): 5674 - 5709
DOI:10.1109/TITS.2025.3528116
[本文引用: 1]
[59]
DONG P, ZHAO J, LIU X, et al Practical application of energy management strategy for hybrid electric vehicles based on intelligent and connected technologies: development stages, challenges, and future trends
[J]. Renewable and Sustainable Energy Reviews , 2022 , 170 : 112947
DOI:10.1016/j.rser.2022.112947
[本文引用: 1]
[60]
DEMBA A, MÖLLER D P F. Vehicle-to-vehicle communication technology [C]// Proceedings of the IEEE International Conference on Electro/Information Technology . Rochester: IEEE, 2018: 459–464.
[本文引用: 1]
[61]
YANG C, ZHA M, WANG W, et al Efficient energy management strategy for hybrid electric vehicles/plug-in hybrid electric vehicles: review and recent advances under intelligent transportation system
[J]. IET Intelligent Transport Systems , 2020 , 14 (7 ): 702 - 711
DOI:10.1049/iet-its.2019.0606
[本文引用: 1]
[62]
唐小林, 郎陈佳, 郑林洋, 等 智能网联混合动力汽车能量管理研究综述
[J]. 重庆理工大学学报: 自然科学 , 2023 , 37 (9 ): 1 - 12
[本文引用: 1]
TANG Xiaolin, LANG Chenjia, ZHENG Linyang, et al Energy management research of intelligent connected hybrid electric vehicles: a review
[J]. Journal of Chongqing University of Technology: Natural Science , 2023 , 37 (9 ): 1 - 12
[本文引用: 1]
[63]
彭美春, 马保童, 廖清睿 实际路况下PHEV等效油耗降低策略研究
[J]. 机械设计与制造 , 2023 , (3 ): 120 - 124
[本文引用: 2]
PENG Meichun, MA Baotong, LIAO Qingrui Study of equivalent fuel consumption reduction strategy for PHEV on real road driving conditions
[J]. Machinery Design & Manufacture , 2023 , (3 ): 120 - 124
[本文引用: 2]
[64]
WANG Y, ZHANG Y, ZHANG C, et al Genetic algorithm-based fuzzy optimization of energy management strategy for fuel cell vehicles considering driving cycles recognition
[J]. Energy , 2023 , 263 : 126112
DOI:10.1016/j.energy.2022.126112
[本文引用: 2]
[65]
陈勇, 魏长银, 李晓宇, 等 融合工况识别的增程式电动汽车模糊能量管理策略研究
[J]. 汽车工程 , 2022 , 44 (4 ): 514 - 524
[本文引用: 2]
CHEN Yong, WEI Changyin, LI Xiaoyu, et al Research on fuzzy energy management strategy for extended-range electric vehicles with driving condition identification
[J]. Automotive Engineering , 2022 , 44 (4 ): 514 - 524
[本文引用: 2]
[66]
刘浩. 考虑工况和驾驶风格识别的混合动力汽车能量管理策略研究[D]. 合肥: 合肥工业大学, 2021.
[本文引用: 2]
LIU Hao. Research on energy management strategy of hybrid electric vehicle considering driving condition and driving style recognition [D]. Hefei: Hefei University of Technology, 2021.
[本文引用: 2]
[67]
邱明明, 虞伟, 赵韩, 等 考虑工况和驾驶风格耦合影响的插电式混合动力汽车制动能量回收策略
[J]. 中国机械工程 , 2022 , 33 (2 ): 143 - 152
[本文引用: 2]
QIU Mingming, YU Wei, ZHAO Han, et al Braking energy recovery control strategy for PHEVs considering coupling influence of driving cycle and driving style
[J]. China Mechanical Engineering , 2022 , 33 (2 ): 143 - 152
[本文引用: 2]
[68]
金辉, 张子豪 基于自适应动态规划的HEV能量管理研究综述
[J]. 汽车工程 , 2020 , 42 (11 ): 1490 - 1496
[本文引用: 1]
JIN Hui, ZHANG Zihao Review of research on HEV energy management based on adaptive dynamic programming
[J]. Automotive Engineering , 2020 , 42 (11 ): 1490 - 1496
[本文引用: 1]
[69]
HOU C, OUYANG M, XU L, et al Approximate Pontryagin’s minimum principle applied to the energy management of plug-in hybrid electric vehicles
[J]. Applied Energy , 2014 , 115 : 174 - 189
DOI:10.1016/j.apenergy.2013.11.002
[本文引用: 1]
[70]
CHEN Z, LIU Y, YE M, et al A survey on key techniques and development perspectives of equivalent consumption minimisation strategy for hybrid electric vehicles
[J]. Renewable and Sustainable Energy Reviews , 2021 , 151 : 111607
DOI:10.1016/j.rser.2021.111607
[本文引用: 1]
[71]
WANG Y, WANG X, SUN Y, et al Model predictive control strategy for energy optimization of series-parallel hybrid electric vehicle
[J]. Journal of Cleaner Production , 2018 , 199 : 348 - 358
DOI:10.1016/j.jclepro.2018.07.191
[本文引用: 1]
[72]
YANG S, WANG W, ZHANG F, et al Driving-style-oriented adaptive equivalent consumption minimization strategies for HEVs
[J]. IEEE Transactions on Vehicular Technology , 2018 , 67 (10 ): 9249 - 9261
DOI:10.1109/TVT.2018.2855146
[本文引用: 2]
[73]
GUO Q, ZHAO Z, SHEN P, et al Adaptive optimal control based on driving style recognition for plug-in hybrid electric vehicle
[J]. Energy , 2019 , 186 : 115824
DOI:10.1016/j.energy.2019.07.154
[本文引用: 2]
[74]
ZHOU Y, RAVEY A, PÉRA M C Multi-mode predictive energy management for fuel cell hybrid electric vehicles using Markov driving pattern recognizer
[J]. Applied Energy , 2020 , 258 : 114057
DOI:10.1016/j.apenergy.2019.114057
[本文引用: 2]
[75]
YANG C, DU S, LI L, et al Adaptive real-time optimal energy management strategy based on equivalent factors optimization for plug-in hybrid electric vehicle
[J]. Applied Energy , 2017 , 203 : 883 - 896
DOI:10.1016/j.apenergy.2017.06.106
[本文引用: 2]
[76]
FAN L, WANG Y, WEI H, et al A GA-based online real-time optimized energy management strategy for plug-in hybrid electric vehicles
[J]. Energy , 2022 , 241 : 122811
DOI:10.1016/j.energy.2021.122811
[本文引用: 2]
[77]
YU K, LIANG Q, YANG J, et al Model predictive control for hybrid electric vehicle platooning using route information
[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering , 2016 , 230 (9 ): 1273 - 1285
DOI:10.1177/0954407015606314
[本文引用: 2]
[78]
赵秀春, 郭戈 混合动力电动汽车的跟车控制与能量管理
[J]. 自动化学报 , 2022 , 48 (1 ): 162 - 170
[本文引用: 2]
ZHAO Xiuchun, GUO Ge Tracking control and energy management of hybrid electric vehicles
[J]. Acta Automatica Sinica , 2022 , 48 (1 ): 162 - 170
[本文引用: 2]
[79]
FAN W, LIU B, TANG J, et al Study on energy management strategy for a P2 diesel HEV considering low temperature environment
[J]. Energy , 2025 , 318 : 134771
DOI:10.1016/j.energy.2025.134771
[本文引用: 2]
[80]
HAN J, KHALATBARISOLTANI A, YANG Y, et al Energy management in plug-in hybrid electric vehicles: preheating the battery packs in low-temperature driving scenarios
[J]. IEEE Transactions on Intelligent Transportation Systems , 2024 , 25 (2 ): 1978 - 1991
DOI:10.1109/TITS.2023.3317637
[本文引用: 2]
[81]
闫德超. 基于多源信息融合的四驱PHEV能量管理策略研究[D]. 淄博: 山东理工大学, 2022.
[本文引用: 2]
YAN Dechao. Research on energy management strategy of four-wheel drive PHEV based on multi-source information fusion [D]. Zibo: Shandong University of Technology, 2022.
[本文引用: 2]
[82]
詹森. 基于工况与驾驶风格识别的混合动力汽车能量管理策略研究[D]. 重庆: 重庆大学, 2016.
[本文引用: 2]
ZHAN Sen. Energy management strategy of hybrid electric vehicle based on the recognition of driving cycle and driving style [D]. Chongqing: Chongqing University, 2016.
[本文引用: 2]
[83]
MNIH V, KAVUKCUOGLU K, SILVER D, et al Human-level control through deep reinforcement learning
[J]. Nature , 2015 , 518 (7540 ): 529 - 533
DOI:10.1038/nature14236
[本文引用: 1]
[84]
SILVER D, HUANG A, MADDISON C J, et al Mastering the game of Go with deep neural networks and tree search
[J]. Nature , 2016 , 529 (7587 ): 484 - 489
DOI:10.1038/nature16961
[本文引用: 1]
[85]
WU J, HE H, PENG J, et al Continuous reinforcement learning of energy management with deep Q network for a power split hybrid electric bus
[J]. Applied Energy , 2018 , 222 : 799 - 811
DOI:10.1016/j.apenergy.2018.03.104
[本文引用: 1]
[86]
LI Y, HE H, PENG J, et al Power management for a plug-in hybrid electric vehicle based on reinforcement learning with continuous state and action spaces
[J]. Energy Procedia , 2017 , 142 : 2270 - 2275
DOI:10.1016/j.egypro.2017.12.629
[本文引用: 1]
[87]
NEVES D E, ISHITANI L, DO PATROCÍNIO JÚNIOR Z K G Advances and challenges in learning from experience replay
[J]. Artificial Intelligence Review , 2024 , 58 (2 ): 54
DOI:10.1007/s10462-024-11062-0
[本文引用: 1]
[89]
ABDUL HAMEED M S, CHADHA G S, SCHWUNG A, et al Gradient monitored reinforcement learning
[J]. IEEE Transactions on Neural Networks and Learning Systems , 2023 , 34 (8 ): 4106 - 4119
DOI:10.1109/TNNLS.2021.3119853
[本文引用: 1]
[90]
TIONG T, SAAD I, TEO K T K, et al. Deep reinforcement learning with robust deep deterministic policy gradient [C]// Proceedings of the 2nd International Conference on Electrical , Control and Instrumentation Engineering . Kuala Lumpur: IEEE, 2020: 1–5.
[本文引用: 1]
[91]
ENGSTROM L, ILYAS A, SANTURKAR S, et al. Implementation matters in deep RL: a case study on PPO and TRPO [C]// Proceedings of the International Conference on Learning Representations . [S.l]: Curran Associates Inc, 2020.
[本文引用: 1]
[92]
HUANG Y, HU H, TAN J, et al Deep reinforcement learning based energy management strategy for range extend fuel cell hybrid electric vehicle
[J]. Energy Conversion and Management , 2023 , 277 : 116678
DOI:10.1016/j.enconman.2023.116678
[本文引用: 1]
[93]
WANG H, YE Y, ZHANG J, et al A comparative study of 13 deep reinforcement learning based energy management methods for a hybrid electric vehicle
[J]. Energy , 2023 , 266 : 126497
DOI:10.1016/j.energy.2022.126497
[本文引用: 1]
[94]
LI Y, HE H, PENG J, et al Deep reinforcement learning-based energy management for a series hybrid electric vehicle enabled by history cumulative trip information
[J]. IEEE Transactions on Vehicular Technology , 2019 , 68 (8 ): 7416 - 7430
DOI:10.1109/TVT.2019.2926472
[本文引用: 1]
[95]
ZHANG H, CHEN B, LEI N, et al Integrated thermal and energy management of connected hybrid electric vehicles using deep reinforcement learning
[J]. IEEE Transactions on Transportation Electrification , 2024 , 10 (2 ): 4594 - 4603
DOI:10.1109/TTE.2023.3309396
[本文引用: 1]
[96]
TANG X, CHEN J, LIU T, et al Distributed deep reinforcement learning-based energy and emission management strategy for hybrid electric vehicles
[J]. IEEE Transactions on Vehicular Technology , 2021 , 70 (10 ): 9922 - 9934
DOI:10.1109/TVT.2021.3107734
[本文引用: 1]
[97]
石月美. 基于驾驶风格识别和深度强化学习的插电式混合动力客车能量管理策略[D]. 济南: 山东大学, 2021.
[本文引用: 1]
SHI Yuemei. Energy management strategy of plug-in hybrid electric bus based on driving style and deep reinforcement learning [D]. Jinan: Shandong University, 2021.
[本文引用: 1]
[98]
CUI N, CUI W, SHI Y Deep reinforcement learning based PHEV energy management with co-recognition for traffic condition and driving style
[J]. IEEE Transactions on Intelligent Vehicles , 2023 , 8 (4 ): 3026 - 3039
DOI:10.1109/TIV.2023.3235110
[本文引用: 2]
[99]
ZHANG C, CUI W, CUI N. Deep reinforcement learning based multi-objective energy management strategy for a plug-in hybrid electric bus considering driving style recognition [C]// Proceedings of the 6th CAA International Conference on Vehicular Control and Intelligence . Nanjing: IEEE, 2022: 1–6.
[本文引用: 2]
[100]
WU Y, HUANG Z, ZHANG R, et al Driving style-aware energy management for battery/supercapacitor electric vehicles using deep reinforcement learning
[J]. Journal of Energy Storage , 2023 , 73 : 109199
DOI:10.1016/j.est.2023.109199
[本文引用: 2]
[101]
宋震. 基于路况信息和驾驶风格的燃料电池汽车自适应能量管理策略研究[D]. 上海: 同济大学, 2022.
[本文引用: 1]
SONG Zhen. Research on adaptive energy management strategy of fuel cell vehicle based on traffic information and driving style [D]. Shanghai: Tongji University, 2022.
[本文引用: 1]
[102]
CHANG C, ZHAO W, WANG C, et al A novel energy management strategy integrating deep reinforcement learning and rule based on condition identification
[J]. IEEE Transactions on Vehicular Technology , 2023 , 72 (2 ): 1674 - 1688
DOI:10.1109/TVT.2022.3209817
[本文引用: 2]
[103]
HUANG R, HE H A novel data-driven energy management strategy for fuel cell hybrid electric bus based on improved twin delayed deep deterministic policy gradient algorithm
[J]. International Journal of Hydrogen Energy , 2024 , 52 : 782 - 798
DOI:10.1016/j.ijhydene.2023.04.335
[本文引用: 2]
[104]
TANG X, ZHANG J, PI D, et al Battery health-aware and deep reinforcement learning-based energy management for naturalistic data-driven driving scenarios
[J]. IEEE Transactions on Transportation Electrification , 2022 , 8 (1 ): 948 - 964
DOI:10.1109/TTE.2021.3107143
[本文引用: 2]
[105]
HUANG R, HE H, ZHAO X, et al Battery health-aware and naturalistic data-driven energy management for hybrid electric bus based on TD3 deep reinforcement learning algorithm
[J]. Applied Energy , 2022 , 321 : 119353
DOI:10.1016/j.apenergy.2022.119353
[本文引用: 1]
[106]
CHEN J, SHU H, TANG X, et al Deep reinforcement learning-based multi-objective control of hybrid power system combined with road recognition under time-varying environment
[J]. Energy , 2022 , 239 : 122123
DOI:10.1016/j.energy.2021.122123
[本文引用: 2]
[107]
JIA C, ZHOU J, HE H, et al Health-conscious deep reinforcement learning energy management for fuel cell buses integrating environmental and look-ahead road information
[J]. Energy , 2024 , 290 : 130146
DOI:10.1016/j.energy.2023.130146
[本文引用: 2]
[108]
LI K, ZHOU J, JIA C, et al Energy sources durability energy management for fuel cell hybrid electric bus based on deep reinforcement learning considering future terrain information
[J]. International Journal of Hydrogen Energy , 2024 , 52 : 821 - 833
DOI:10.1016/j.ijhydene.2023.05.311
[本文引用: 2]
[109]
INUZUKA S, ZHANG B, SHEN T Real-time HEV energy management strategy considering road congestion based on deep reinforcement learning
[J]. Energies , 2021 , 14 (17 ): 5270
DOI:10.3390/en14175270
[本文引用: 2]
[110]
NIU Z, HE H A data-driven solution for intelligent power allocation of connected hybrid electric vehicles inspired by offline deep reinforcement learning in V2X scenario
[J]. Applied Energy , 2024 , 372 : 123861
DOI:10.1016/j.apenergy.2024.123861
[本文引用: 2]
[111]
LI J, WU X, XU M, et al Deep reinforcement learning and reward shaping based eco-driving control for automated HEVs among signalized intersections
[J]. Energy , 2022 , 251 : 123924
DOI:10.1016/j.energy.2022.123924
[本文引用: 2]
[112]
WU X, LI J, SU C, et al A deep reinforcement learning based hierarchical eco-driving strategy for connected and automated HEVs
[J]. IEEE Transactions on Vehicular Technology , 2023 , 72 (11 ): 13901 - 13916
[本文引用: 2]
[113]
ZHANG D, LI J, GUO N, et al Adaptive deep reinforcement learning energy management for hybrid electric vehicles considering driving condition recognition
[J]. Energy , 2024 , 313 : 134086
DOI:10.1016/j.energy.2024.134086
[本文引用: 2]
[114]
TAO F, GONG H, FU Z, et al Terrain information-involved power allocation optimization for fuel cell/battery/ultracapacitor hybrid electric vehicles via an improved deep reinforcement learning
[J]. Engineering Applications of Artificial Intelligence , 2023 , 125 : 106685
DOI:10.1016/j.engappai.2023.106685
[本文引用: 1]
[115]
HUANG Y, KANG Z, MAO X, et al Deep reinforcement learning based energy management strategy considering running costs and energy source aging for fuel cell hybrid electric vehicle
[J]. Energy , 2023 , 283 : 129177
DOI:10.1016/j.energy.2023.129177
[本文引用: 1]
[116]
JIA C, LIU W, HE H, et al Deep reinforcement learning-based energy management strategy for fuel cell buses integrating future road information and cabin comfort control
[J]. Energy Conversion and Management , 2024 , 321 : 119032
DOI:10.1016/j.enconman.2024.119032
[本文引用: 1]
[117]
LI M, YIN L, YAN M, et al Hierarchical intelligent energy-saving control strategy for fuel cell hybrid electric buses based on traffic flow predictions
[J]. Energy , 2024 , 304 : 132144
DOI:10.1016/j.energy.2024.132144
[本文引用: 1]
[118]
LI X, HE H, WU J Knowledge-guided deep reinforcement learning for multiobjective energy management of fuel cell electric vehicles
[J]. IEEE Transactions on Transportation Electrification , 2025 , 11 (1 ): 2344 - 2355
[本文引用: 1]
[119]
HUANG R, HE H Naturalistic data-driven and emission reduction-conscious energy management for hybrid electric vehicle based on improved soft actor-critic algorithm
[J]. Journal of Power Sources , 2023 , 559 : 232648
DOI:10.1016/j.jpowsour.2023.232648
[本文引用: 1]
[120]
CHENG R, OROSZ G, MURRAY R M, et al. End-to-end safe reinforcement learning through barrier functions for safety-critical continuous control tasks [C]// Proceedings of the AAAI Conference on Artificial Intelligence . Washington: AAAI Press, 2019: 3387–3395.
[本文引用: 1]
[121]
BERRUETA T A, PINOSKY A, MURPHEY T D Maximum diffusion reinforcement learning
[J]. Nature Machine Intelligence , 2024 , 6 (5 ): 504 - 514
DOI:10.1038/s42256-024-00829-3
[本文引用: 1]
[122]
VAN BAAR J, SULLIVAN A, CORDOREL R, et al. Sim-to-real transfer learning using robustified controllers in robotic tasks involving complex dynamics [C]// Proceedings of the International Conference on Robotics and Automation . Montreal: IEEE, 2019: 6001–6007.
[本文引用: 1]
[123]
LIU Z E, LI Y, ZHOU Q, et al Real-time energy management for HEV combining naturalistic driving data and deep reinforcement learning with high generalization
[J]. Applied Energy , 2025 , 377 : 124350
DOI:10.1016/j.apenergy.2024.124350
[本文引用: 1]
[124]
LIU Z E, LI Y, ZHOU Q, et al Deep reinforcement learning-based energy management for heavy duty HEV considering discrete-continuous hybrid action space
[J]. IEEE Transactions on Transportation Electrification , 2024 , 10 (4 ): 9864 - 9876
DOI:10.1109/TTE.2024.3363650
[本文引用: 1]
[125]
LI T, CUI W, CUI N Real-time multiobjective EMS for fuel cell vehicle considering energy source health awareness under unknown real-world conditions
[J]. IEEE Transactions on Transportation Electrification , 2025 , 11 (4 ): 8936 - 8947
DOI:10.1109/TTE.2025.3546924
[本文引用: 1]
[126]
HU D, HUANG C, WU J, et al Enhancing data-driven energy management strategy via digital expert guidance for electrified vehicles
[J]. Applied Energy , 2025 , 381 : 125138
DOI:10.1016/j.apenergy.2024.125138
[本文引用: 1]
[127]
FAN Y, PENG J, YU S, et al Global optimization guided energy management strategy for hybrid electric vehicles based on generative adversarial network embedded reinforcement learning
[J]. Energy , 2025 , 322 : 135586
DOI:10.1016/j.energy.2025.135586
[本文引用: 1]
[128]
XU J, LI Z, DU G, et al A transferable energy management strategy for hybrid electric vehicles via dueling deep deterministic policy gradient
[J]. Green Energy and Intelligent Transportation , 2022 , 1 (2 ): 100018
DOI:10.1016/j.geits.2022.100018
[本文引用: 1]
[129]
LIAN R, TAN H, PENG J, et al Cross-type transfer for deep reinforcement learning based hybrid electric vehicle energy management
[J]. IEEE Transactions on Vehicular Technology , 2020 , 69 (8 ): 8367 - 8380
DOI:10.1109/TVT.2020.2999263
[本文引用: 1]
[130]
TAN Y, XU J, MA J, et al A transferable perception-guided EMS for series hybrid electric unmanned tracked vehicles
[J]. Energy , 2024 , 306 : 132367
DOI:10.1016/j.energy.2024.132367
[本文引用: 1]
[131]
HE H, WANG Y, LI J, et al An improved energy management strategy for hybrid electric vehicles integrating multistates of vehicle-traffic information
[J]. IEEE Transactions on Transportation Electrification , 2021 , 7 (3 ): 1161 - 1172
DOI:10.1109/TTE.2021.3054896
[本文引用: 1]
[132]
HUANG R, HE H, SU Q, et al Enabling cross-type full-knowledge transferable energy management for hybrid electric vehicles via deep transfer reinforcement learning
[J]. Energy , 2024 , 305 : 132394
DOI:10.1016/j.energy.2024.132394
[本文引用: 1]
[133]
HUANG R, HE H, SU Q Towards a fossil-free urban transport system: an intelligent cross-type transferable energy management framework based on deep transfer reinforcement learning
[J]. Applied Energy , 2024 , 363 : 123080
DOI:10.1016/j.apenergy.2024.123080
[本文引用: 1]
[134]
CHEN H, GUO G, TANG B, et al Data-driven transferred energy management strategy for hybrid electric vehicles via deep reinforcement learning
[J]. Energy Reports , 2023 , 10 : 2680 - 2692
DOI:10.1016/j.egyr.2023.09.087
[本文引用: 1]
[135]
LI J, ZHOU Q, HE Y, et al Distributed cooperative energy management system of connected hybrid electric vehicles with personalized non-stationary inference
[J]. IEEE Transactions on Transportation Electrification , 2022 , 8 (2 ): 2996 - 3007
DOI:10.1109/TTE.2021.3127142
[本文引用: 1]
[136]
WANG X, ZHU Z, HUANG G, et al. DriveDreamer: towards real-world-drive world models for autonomous driving [C]// Proceedings of the European Conference on Computer Vision . Milan: Springer, 2024: 55–72.
[本文引用: 1]
IEA, World energy outlook 2020
1
2021
... 当前,全球交通运输领域对煤炭、石油和天然气等不可再生化石燃料的过分依赖,不仅加剧了资源枯竭,而且导致气候变化、地缘政治局势紧张,对公众健康产生了负面影响[1 -3 ] . 为了应对化石燃料依赖所带来的不利影响,交通电气化和能源多样化已成为重要的解决方案. 混合动力汽车(hybrid electric vehicle, HEV)凭借其整合了传统内燃机与电驱动系统的独特架构,展现出显著的过渡技术优势,不仅有效降低了能源消耗和污染排放,而且提高了能源利用效率. 因此,发展HEV成为了缓解化石燃料依赖问题的重要技术手段[4 -6 ] . 此外,HEV缓解了纯电动汽车的续航焦虑和电池退化问题[7 ] . 总体而言,HEV提供了高效、可持续的动力方案;进一步地, HEV的节能减排潜力依赖于能量管理策略(energy management strategy, EMS)对燃油与电能消耗比例的优化,以及对发动机与电动机的功率分配. ...
Pathway toward carbon-neutral electrical systems in China by mid-century with negative CO2 abatement costs informed by high-resolution modeling
0
2021
Toward carbon-neutral electricity and mobility: is the grid infrastructure ready?
1
2021
... 当前,全球交通运输领域对煤炭、石油和天然气等不可再生化石燃料的过分依赖,不仅加剧了资源枯竭,而且导致气候变化、地缘政治局势紧张,对公众健康产生了负面影响[1 -3 ] . 为了应对化石燃料依赖所带来的不利影响,交通电气化和能源多样化已成为重要的解决方案. 混合动力汽车(hybrid electric vehicle, HEV)凭借其整合了传统内燃机与电驱动系统的独特架构,展现出显著的过渡技术优势,不仅有效降低了能源消耗和污染排放,而且提高了能源利用效率. 因此,发展HEV成为了缓解化石燃料依赖问题的重要技术手段[4 -6 ] . 此外,HEV缓解了纯电动汽车的续航焦虑和电池退化问题[7 ] . 总体而言,HEV提供了高效、可持续的动力方案;进一步地, HEV的节能减排潜力依赖于能量管理策略(energy management strategy, EMS)对燃油与电能消耗比例的优化,以及对发动机与电动机的功率分配. ...
Economic, environmental and grid-resilience benefits of converting diesel trains to battery-electric
1
2021
... 当前,全球交通运输领域对煤炭、石油和天然气等不可再生化石燃料的过分依赖,不仅加剧了资源枯竭,而且导致气候变化、地缘政治局势紧张,对公众健康产生了负面影响[1 -3 ] . 为了应对化石燃料依赖所带来的不利影响,交通电气化和能源多样化已成为重要的解决方案. 混合动力汽车(hybrid electric vehicle, HEV)凭借其整合了传统内燃机与电驱动系统的独特架构,展现出显著的过渡技术优势,不仅有效降低了能源消耗和污染排放,而且提高了能源利用效率. 因此,发展HEV成为了缓解化石燃料依赖问题的重要技术手段[4 -6 ] . 此外,HEV缓解了纯电动汽车的续航焦虑和电池退化问题[7 ] . 总体而言,HEV提供了高效、可持续的动力方案;进一步地, HEV的节能减排潜力依赖于能量管理策略(energy management strategy, EMS)对燃油与电能消耗比例的优化,以及对发动机与电动机的功率分配. ...
The role of natural gas and its infrastructure in mitigating greenhouse gas emissions, improving regional air quality, and renewable resource integration
0
2018
Energy control of plug-in hybrid electric vehicles using model predictive control with route preview
1
2021
... 当前,全球交通运输领域对煤炭、石油和天然气等不可再生化石燃料的过分依赖,不仅加剧了资源枯竭,而且导致气候变化、地缘政治局势紧张,对公众健康产生了负面影响[1 -3 ] . 为了应对化石燃料依赖所带来的不利影响,交通电气化和能源多样化已成为重要的解决方案. 混合动力汽车(hybrid electric vehicle, HEV)凭借其整合了传统内燃机与电驱动系统的独特架构,展现出显著的过渡技术优势,不仅有效降低了能源消耗和污染排放,而且提高了能源利用效率. 因此,发展HEV成为了缓解化石燃料依赖问题的重要技术手段[4 -6 ] . 此外,HEV缓解了纯电动汽车的续航焦虑和电池退化问题[7 ] . 总体而言,HEV提供了高效、可持续的动力方案;进一步地, HEV的节能减排潜力依赖于能量管理策略(energy management strategy, EMS)对燃油与电能消耗比例的优化,以及对发动机与电动机的功率分配. ...
Comparison of semi-active hybrid battery system configurations for electric taxis application
1
2020
... 当前,全球交通运输领域对煤炭、石油和天然气等不可再生化石燃料的过分依赖,不仅加剧了资源枯竭,而且导致气候变化、地缘政治局势紧张,对公众健康产生了负面影响[1 -3 ] . 为了应对化石燃料依赖所带来的不利影响,交通电气化和能源多样化已成为重要的解决方案. 混合动力汽车(hybrid electric vehicle, HEV)凭借其整合了传统内燃机与电驱动系统的独特架构,展现出显著的过渡技术优势,不仅有效降低了能源消耗和污染排放,而且提高了能源利用效率. 因此,发展HEV成为了缓解化石燃料依赖问题的重要技术手段[4 -6 ] . 此外,HEV缓解了纯电动汽车的续航焦虑和电池退化问题[7 ] . 总体而言,HEV提供了高效、可持续的动力方案;进一步地, HEV的节能减排潜力依赖于能量管理策略(energy management strategy, EMS)对燃油与电能消耗比例的优化,以及对发动机与电动机的功率分配. ...
混合动力电动汽车能量管理技术研究综述
1
2022
... 在车辆行驶过程中,EMS根据驾驶员的行驶需求、车辆动力系统的运行状态,并且考虑不同动力源的工作特性差异,协调发动机与电动机的启停和功率分配[8 ] . EMS的有效性不仅依赖于毫秒级的精确控制,而且其需要具备应对动态和复杂交通场景的能力. 传统EMS(如基于规则、优化的方法)大多基于有限的状态信息如车辆速度、加速度、电池荷电状态(state of charge, SOC),构建规则库或优化模型,其静态决策机制难以较好地应对复杂交通场景的时变特性[9 ] . 近年来,随着深度强化学习(deep reinforcement learning, DRL)方法的引入以及智能交通系统(intelligent transportation system, ITS)[10 ] 技术的进步,由多模态行车信息驱动的能量管理范式逐渐兴起. 具体而言,行车信息是指能够反映车辆行驶状态的一系列动态数据,包括行驶速度、加/减速度、SOC等车辆自身因素,以及车流密度、行驶工况、道路坡度等外部环境因素,这些信息实时反映了交通状况和驾驶行为的变化,为EMS提供了更高维度的决策依据[11 ] . ...
混合动力电动汽车能量管理技术研究综述
1
2022
... 在车辆行驶过程中,EMS根据驾驶员的行驶需求、车辆动力系统的运行状态,并且考虑不同动力源的工作特性差异,协调发动机与电动机的启停和功率分配[8 ] . EMS的有效性不仅依赖于毫秒级的精确控制,而且其需要具备应对动态和复杂交通场景的能力. 传统EMS(如基于规则、优化的方法)大多基于有限的状态信息如车辆速度、加速度、电池荷电状态(state of charge, SOC),构建规则库或优化模型,其静态决策机制难以较好地应对复杂交通场景的时变特性[9 ] . 近年来,随着深度强化学习(deep reinforcement learning, DRL)方法的引入以及智能交通系统(intelligent transportation system, ITS)[10 ] 技术的进步,由多模态行车信息驱动的能量管理范式逐渐兴起. 具体而言,行车信息是指能够反映车辆行驶状态的一系列动态数据,包括行驶速度、加/减速度、SOC等车辆自身因素,以及车流密度、行驶工况、道路坡度等外部环境因素,这些信息实时反映了交通状况和驾驶行为的变化,为EMS提供了更高维度的决策依据[11 ] . ...
Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: topologies and integrated energy management strategies
1
2020
... 在车辆行驶过程中,EMS根据驾驶员的行驶需求、车辆动力系统的运行状态,并且考虑不同动力源的工作特性差异,协调发动机与电动机的启停和功率分配[8 ] . EMS的有效性不仅依赖于毫秒级的精确控制,而且其需要具备应对动态和复杂交通场景的能力. 传统EMS(如基于规则、优化的方法)大多基于有限的状态信息如车辆速度、加速度、电池荷电状态(state of charge, SOC),构建规则库或优化模型,其静态决策机制难以较好地应对复杂交通场景的时变特性[9 ] . 近年来,随着深度强化学习(deep reinforcement learning, DRL)方法的引入以及智能交通系统(intelligent transportation system, ITS)[10 ] 技术的进步,由多模态行车信息驱动的能量管理范式逐渐兴起. 具体而言,行车信息是指能够反映车辆行驶状态的一系列动态数据,包括行驶速度、加/减速度、SOC等车辆自身因素,以及车流密度、行驶工况、道路坡度等外部环境因素,这些信息实时反映了交通状况和驾驶行为的变化,为EMS提供了更高维度的决策依据[11 ] . ...
A data-driven energy management method for parallel PHEVs based on action dependent heuristic dynamic programming (ADHDP) model
1
2023
... 在车辆行驶过程中,EMS根据驾驶员的行驶需求、车辆动力系统的运行状态,并且考虑不同动力源的工作特性差异,协调发动机与电动机的启停和功率分配[8 ] . EMS的有效性不仅依赖于毫秒级的精确控制,而且其需要具备应对动态和复杂交通场景的能力. 传统EMS(如基于规则、优化的方法)大多基于有限的状态信息如车辆速度、加速度、电池荷电状态(state of charge, SOC),构建规则库或优化模型,其静态决策机制难以较好地应对复杂交通场景的时变特性[9 ] . 近年来,随着深度强化学习(deep reinforcement learning, DRL)方法的引入以及智能交通系统(intelligent transportation system, ITS)[10 ] 技术的进步,由多模态行车信息驱动的能量管理范式逐渐兴起. 具体而言,行车信息是指能够反映车辆行驶状态的一系列动态数据,包括行驶速度、加/减速度、SOC等车辆自身因素,以及车流密度、行驶工况、道路坡度等外部环境因素,这些信息实时反映了交通状况和驾驶行为的变化,为EMS提供了更高维度的决策依据[11 ] . ...
Intelligent transportation systems
1
2010
... 在车辆行驶过程中,EMS根据驾驶员的行驶需求、车辆动力系统的运行状态,并且考虑不同动力源的工作特性差异,协调发动机与电动机的启停和功率分配[8 ] . EMS的有效性不仅依赖于毫秒级的精确控制,而且其需要具备应对动态和复杂交通场景的能力. 传统EMS(如基于规则、优化的方法)大多基于有限的状态信息如车辆速度、加速度、电池荷电状态(state of charge, SOC),构建规则库或优化模型,其静态决策机制难以较好地应对复杂交通场景的时变特性[9 ] . 近年来,随着深度强化学习(deep reinforcement learning, DRL)方法的引入以及智能交通系统(intelligent transportation system, ITS)[10 ] 技术的进步,由多模态行车信息驱动的能量管理范式逐渐兴起. 具体而言,行车信息是指能够反映车辆行驶状态的一系列动态数据,包括行驶速度、加/减速度、SOC等车辆自身因素,以及车流密度、行驶工况、道路坡度等外部环境因素,这些信息实时反映了交通状况和驾驶行为的变化,为EMS提供了更高维度的决策依据[11 ] . ...
Deep reinforcement learning based energy management strategies for electrified vehicles: recent advances and perspectives
1
2024
... 通过查阅近年来具有代表性且权威的综述文章,可以看出,集成多源行车信息的有效性已在众多研究中得到验证. He等[12 ] 全面系统地调研基于DRL的EMS,认为DRL方法能够更有效地处理及整合大量行车信息,且在解决传统控制方法的实时性和泛化性瓶颈方面具有巨大潜力. Liu等[13 ] 深入探讨基于驾驶循环的EMS,重点分析驾驶循环对能量管理的影响. Gan等[14 ] 从ITS的角度出发,探讨ITS与EMS的结合模式,指出丰富的行车信息能够提升EMS的性能. ...
Driving conditions-driven energy management strategies for hybrid electric vehicles: a review
1
2021
... 通过查阅近年来具有代表性且权威的综述文章,可以看出,集成多源行车信息的有效性已在众多研究中得到验证. He等[12 ] 全面系统地调研基于DRL的EMS,认为DRL方法能够更有效地处理及整合大量行车信息,且在解决传统控制方法的实时性和泛化性瓶颈方面具有巨大潜力. Liu等[13 ] 深入探讨基于驾驶循环的EMS,重点分析驾驶循环对能量管理的影响. Gan等[14 ] 从ITS的角度出发,探讨ITS与EMS的结合模式,指出丰富的行车信息能够提升EMS的性能. ...
Intelligent learning algorithm and intelligent transportation-based energy management strategies for hybrid electric vehicles: a review
1
2023
... 通过查阅近年来具有代表性且权威的综述文章,可以看出,集成多源行车信息的有效性已在众多研究中得到验证. He等[12 ] 全面系统地调研基于DRL的EMS,认为DRL方法能够更有效地处理及整合大量行车信息,且在解决传统控制方法的实时性和泛化性瓶颈方面具有巨大潜力. Liu等[13 ] 深入探讨基于驾驶循环的EMS,重点分析驾驶循环对能量管理的影响. Gan等[14 ] 从ITS的角度出发,探讨ITS与EMS的结合模式,指出丰富的行车信息能够提升EMS的性能. ...
Development of economic velocity planning algorithm for plug-in hybrid electric vehicle
1
2022
... 基于行车信息的EMS的核心任务是根据车辆行驶过程中的驾驶行为特征与环境感知信息来优化多动力源功率的分配. 具体而言,EMS通过解析驾驶员操作指令对应的驱动需求功率,结合动力系统效率MAP图、能量源状态以及多源环境信息,实时求解燃油经济性最优的功率分配策略. 由于车辆的需求功率直接表征能量需求强度,研究行车信息对需求功率的调节机制及其能耗传导路径成为了解析信息-能量耦合机理的关键切入点[15 ] . ...
State of the art and trends in electric and hybrid electric vehicles
1
2021
... 根据HEV发动机和电机的位置关系,将其概括为3种结构[16 ] :串联式、并联式、混联式. 相比于传统燃油车,HEV在节能上表现出显著优势,但是由于构型复杂且类型繁多,其内部的能量流传递和功率分配过程较为复杂. 现有对HEV的EMS研究中,有相当一部分工作着重于优化车辆自身的静态参数和构型设计. Luo等[17 ] 从车辆构型出发,利用优化算法对传动比参数进行优化,但是在其分析中,整车及其他部件的参数被简化为固定值,这与实际行驶过程存在一定差异. 类似地,Pam等[18 ] 在研究车辆动力学模型和各部件模型对EMS的影响时,未将道路坡度这类动态变化因素纳入考虑范围. 尽管这些研究为EMS设计提供了宝贵的基础,但是对于行车信息这类动态要素如何影响能耗及其在EMS优化中的潜力,关注度相对不足. 因此,进一步重点探讨动态行车信息对EMS的优化潜力,以期更全面地提升HEV的能量效率. ...
Parameter optimization and control strategy of hybrid electric vehicle transmission system based on improved GA algorithm
1
2023
... 根据HEV发动机和电机的位置关系,将其概括为3种结构[16 ] :串联式、并联式、混联式. 相比于传统燃油车,HEV在节能上表现出显著优势,但是由于构型复杂且类型繁多,其内部的能量流传递和功率分配过程较为复杂. 现有对HEV的EMS研究中,有相当一部分工作着重于优化车辆自身的静态参数和构型设计. Luo等[17 ] 从车辆构型出发,利用优化算法对传动比参数进行优化,但是在其分析中,整车及其他部件的参数被简化为固定值,这与实际行驶过程存在一定差异. 类似地,Pam等[18 ] 在研究车辆动力学模型和各部件模型对EMS的影响时,未将道路坡度这类动态变化因素纳入考虑范围. 尽管这些研究为EMS设计提供了宝贵的基础,但是对于行车信息这类动态要素如何影响能耗及其在EMS优化中的潜力,关注度相对不足. 因此,进一步重点探讨动态行车信息对EMS的优化潜力,以期更全面地提升HEV的能量效率. ...
Comparison of different models for energy management strategy design of a parallel hybrid electric vehicle: impact of the rotating masses
1
2021
... 根据HEV发动机和电机的位置关系,将其概括为3种结构[16 ] :串联式、并联式、混联式. 相比于传统燃油车,HEV在节能上表现出显著优势,但是由于构型复杂且类型繁多,其内部的能量流传递和功率分配过程较为复杂. 现有对HEV的EMS研究中,有相当一部分工作着重于优化车辆自身的静态参数和构型设计. Luo等[17 ] 从车辆构型出发,利用优化算法对传动比参数进行优化,但是在其分析中,整车及其他部件的参数被简化为固定值,这与实际行驶过程存在一定差异. 类似地,Pam等[18 ] 在研究车辆动力学模型和各部件模型对EMS的影响时,未将道路坡度这类动态变化因素纳入考虑范围. 尽管这些研究为EMS设计提供了宝贵的基础,但是对于行车信息这类动态要素如何影响能耗及其在EMS优化中的潜力,关注度相对不足. 因此,进一步重点探讨动态行车信息对EMS的优化潜力,以期更全面地提升HEV的能量效率. ...
Energy optimal control of motor drive system for extending ranges of electric vehicles
1
2021
... 无论何种构型,HEV整车的主要部件包括:发动机、动力电池、驱动电机、离合器、变速器等. 如图1 所示,HEV的动力系统整合了发动机与电动机2种动力单元. 整车在行驶过程中,需要在驱动轮处产生一定的功率以克服各种行驶阻力,这部分功率被称为整车需求功率$ {P_{\text{w}}} $ . 考虑轮胎阻力、空气阻力、坡道阻力和惯性阻力,并根据车辆纵向动力学,构建行驶过程中HEV的$ {P_{\text{w}}} $ [19 ] : ...
Optimization-oriented adaptive equivalent consumption minimization strategy based on short-term demand power prediction for fuel cell hybrid vehicle
1
2021
... HEV的典型能量分配路径如图1 所示,由燃油燃烧驱动发动机产生的机械功率$ {P_{\text{f}}} $ $ {P_{\text{e}}} $ $ {P_{\text{w}}} $ $ {P_{\text{w}}} $ $ {P_{\text{f}}} $ $ {P_{\text{e}}} $ [20 ] . ...
Driving style analysis using primitive driving patterns with Bayesian nonparametric approaches
1
2019
... 行车信息对HEV能耗与排放的影响涉及驾驶风格[21 -22 ] 、行驶工况[23 ] 和道路工况[24 ] ,这些因素不仅决定了车辆的功率需求,而且影响了EMS的优化方向. ...
基于驾驶事件的驾驶风格分类与识别方法研究
1
2024
... 行车信息对HEV能耗与排放的影响涉及驾驶风格[21 -22 ] 、行驶工况[23 ] 和道路工况[24 ] ,这些因素不仅决定了车辆的功率需求,而且影响了EMS的优化方向. ...
基于驾驶事件的驾驶风格分类与识别方法研究
1
2024
... 行车信息对HEV能耗与排放的影响涉及驾驶风格[21 -22 ] 、行驶工况[23 ] 和道路工况[24 ] ,这些因素不仅决定了车辆的功率需求,而且影响了EMS的优化方向. ...
An intelligent multifeature statistical approach for the discrimination of driving conditions of a hybrid electric vehicle
1
2011
... 行车信息对HEV能耗与排放的影响涉及驾驶风格[21 -22 ] 、行驶工况[23 ] 和道路工况[24 ] ,这些因素不仅决定了车辆的功率需求,而且影响了EMS的优化方向. ...
Driving behaviour and trip condition effects on the energy consumption of an electric vehicle under real-world driving
1
2021
... 行车信息对HEV能耗与排放的影响涉及驾驶风格[21 -22 ] 、行驶工况[23 ] 和道路工况[24 ] ,这些因素不仅决定了车辆的功率需求,而且影响了EMS的优化方向. ...
Driving style classification and recognition methods for connected vehicle control in intelligent transportation systems: a review
1
2025
... 驾驶风格具体表现为驾驶员在行驶过程中的一系列驾驶行为,如加/减速、转向及换挡等操作. Mei等[25 ] 揭示了驾驶风格分类与识别方法研究中存在的若干制约因素,包括分类标准不统一、有效数据标注难度较大,以及特征选择和提取过程对领域知识与经验的依赖. 为了应对这些挑战,一些研究利用数据驱动的机器学习算法进行驾驶风格的自动分类,以量化驾驶风格,揭示不同驾驶风格对HEV功率和能耗特性的影响[26 -27 ] . Mohammadnazar等[28 ] 基于机器学习方法构建面向弯道场景的驾驶风格分类模型,实验结果显示,在过弯行为中激进驾驶占15.4%,其燃油消耗比正常驾驶高出约23%,并伴随动力系统效率的下降. Lin等[29 ] 提出基于随机森林回归和驾驶风格、车辆状态等多特征融合的方法来估算车辆的瞬时能耗,实验结果表明,油门踏板的踩踏频率、幅度越大以及加速度变化越快,对能耗的影响越大. 赵佳伟等[30 ] 的实验表明,不同的驾驶风格导致制动损耗和传动效率不同,将间接影响燃油经济性. 综上所述,冷静型驾驶通过平稳控制车速,维持低水平的需求功率;适中型驾驶兼具平稳性与灵活性,通过平滑功率波动使能量分配更贴近系统效率最优曲线;而激进型驾驶因频繁高负荷需求迫使动力系统长期偏离高效工作区,使需求功率增大,车辆排放量升高. ...
A novel regenerative braking energy recuperation system for electric vehicles based on driving style
1
2023
... 驾驶风格具体表现为驾驶员在行驶过程中的一系列驾驶行为,如加/减速、转向及换挡等操作. Mei等[25 ] 揭示了驾驶风格分类与识别方法研究中存在的若干制约因素,包括分类标准不统一、有效数据标注难度较大,以及特征选择和提取过程对领域知识与经验的依赖. 为了应对这些挑战,一些研究利用数据驱动的机器学习算法进行驾驶风格的自动分类,以量化驾驶风格,揭示不同驾驶风格对HEV功率和能耗特性的影响[26 -27 ] . Mohammadnazar等[28 ] 基于机器学习方法构建面向弯道场景的驾驶风格分类模型,实验结果显示,在过弯行为中激进驾驶占15.4%,其燃油消耗比正常驾驶高出约23%,并伴随动力系统效率的下降. Lin等[29 ] 提出基于随机森林回归和驾驶风格、车辆状态等多特征融合的方法来估算车辆的瞬时能耗,实验结果表明,油门踏板的踩踏频率、幅度越大以及加速度变化越快,对能耗的影响越大. 赵佳伟等[30 ] 的实验表明,不同的驾驶风格导致制动损耗和传动效率不同,将间接影响燃油经济性. 综上所述,冷静型驾驶通过平稳控制车速,维持低水平的需求功率;适中型驾驶兼具平稳性与灵活性,通过平滑功率波动使能量分配更贴近系统效率最优曲线;而激进型驾驶因频繁高负荷需求迫使动力系统长期偏离高效工作区,使需求功率增大,车辆排放量升高. ...
基于驾驶风格识别的混合动力汽车能量管理策略
1
2016
... 驾驶风格具体表现为驾驶员在行驶过程中的一系列驾驶行为,如加/减速、转向及换挡等操作. Mei等[25 ] 揭示了驾驶风格分类与识别方法研究中存在的若干制约因素,包括分类标准不统一、有效数据标注难度较大,以及特征选择和提取过程对领域知识与经验的依赖. 为了应对这些挑战,一些研究利用数据驱动的机器学习算法进行驾驶风格的自动分类,以量化驾驶风格,揭示不同驾驶风格对HEV功率和能耗特性的影响[26 -27 ] . Mohammadnazar等[28 ] 基于机器学习方法构建面向弯道场景的驾驶风格分类模型,实验结果显示,在过弯行为中激进驾驶占15.4%,其燃油消耗比正常驾驶高出约23%,并伴随动力系统效率的下降. Lin等[29 ] 提出基于随机森林回归和驾驶风格、车辆状态等多特征融合的方法来估算车辆的瞬时能耗,实验结果表明,油门踏板的踩踏频率、幅度越大以及加速度变化越快,对能耗的影响越大. 赵佳伟等[30 ] 的实验表明,不同的驾驶风格导致制动损耗和传动效率不同,将间接影响燃油经济性. 综上所述,冷静型驾驶通过平稳控制车速,维持低水平的需求功率;适中型驾驶兼具平稳性与灵活性,通过平滑功率波动使能量分配更贴近系统效率最优曲线;而激进型驾驶因频繁高负荷需求迫使动力系统长期偏离高效工作区,使需求功率增大,车辆排放量升高. ...
基于驾驶风格识别的混合动力汽车能量管理策略
1
2016
... 驾驶风格具体表现为驾驶员在行驶过程中的一系列驾驶行为,如加/减速、转向及换挡等操作. Mei等[25 ] 揭示了驾驶风格分类与识别方法研究中存在的若干制约因素,包括分类标准不统一、有效数据标注难度较大,以及特征选择和提取过程对领域知识与经验的依赖. 为了应对这些挑战,一些研究利用数据驱动的机器学习算法进行驾驶风格的自动分类,以量化驾驶风格,揭示不同驾驶风格对HEV功率和能耗特性的影响[26 -27 ] . Mohammadnazar等[28 ] 基于机器学习方法构建面向弯道场景的驾驶风格分类模型,实验结果显示,在过弯行为中激进驾驶占15.4%,其燃油消耗比正常驾驶高出约23%,并伴随动力系统效率的下降. Lin等[29 ] 提出基于随机森林回归和驾驶风格、车辆状态等多特征融合的方法来估算车辆的瞬时能耗,实验结果表明,油门踏板的踩踏频率、幅度越大以及加速度变化越快,对能耗的影响越大. 赵佳伟等[30 ] 的实验表明,不同的驾驶风格导致制动损耗和传动效率不同,将间接影响燃油经济性. 综上所述,冷静型驾驶通过平稳控制车速,维持低水平的需求功率;适中型驾驶兼具平稳性与灵活性,通过平滑功率波动使能量分配更贴近系统效率最优曲线;而激进型驾驶因频繁高负荷需求迫使动力系统长期偏离高效工作区,使需求功率增大,车辆排放量升高. ...
Assessing driving behavior influence on fuel efficiency using machine-learning and drive-cycle simulations
1
2024
... 驾驶风格具体表现为驾驶员在行驶过程中的一系列驾驶行为,如加/减速、转向及换挡等操作. Mei等[25 ] 揭示了驾驶风格分类与识别方法研究中存在的若干制约因素,包括分类标准不统一、有效数据标注难度较大,以及特征选择和提取过程对领域知识与经验的依赖. 为了应对这些挑战,一些研究利用数据驱动的机器学习算法进行驾驶风格的自动分类,以量化驾驶风格,揭示不同驾驶风格对HEV功率和能耗特性的影响[26 -27 ] . Mohammadnazar等[28 ] 基于机器学习方法构建面向弯道场景的驾驶风格分类模型,实验结果显示,在过弯行为中激进驾驶占15.4%,其燃油消耗比正常驾驶高出约23%,并伴随动力系统效率的下降. Lin等[29 ] 提出基于随机森林回归和驾驶风格、车辆状态等多特征融合的方法来估算车辆的瞬时能耗,实验结果表明,油门踏板的踩踏频率、幅度越大以及加速度变化越快,对能耗的影响越大. 赵佳伟等[30 ] 的实验表明,不同的驾驶风格导致制动损耗和传动效率不同,将间接影响燃油经济性. 综上所述,冷静型驾驶通过平稳控制车速,维持低水平的需求功率;适中型驾驶兼具平稳性与灵活性,通过平滑功率波动使能量分配更贴近系统效率最优曲线;而激进型驾驶因频繁高负荷需求迫使动力系统长期偏离高效工作区,使需求功率增大,车辆排放量升高. ...
Multi-feature fusion-based instantaneous energy consumption estimation for electric buses
1
2023
... 驾驶风格具体表现为驾驶员在行驶过程中的一系列驾驶行为,如加/减速、转向及换挡等操作. Mei等[25 ] 揭示了驾驶风格分类与识别方法研究中存在的若干制约因素,包括分类标准不统一、有效数据标注难度较大,以及特征选择和提取过程对领域知识与经验的依赖. 为了应对这些挑战,一些研究利用数据驱动的机器学习算法进行驾驶风格的自动分类,以量化驾驶风格,揭示不同驾驶风格对HEV功率和能耗特性的影响[26 -27 ] . Mohammadnazar等[28 ] 基于机器学习方法构建面向弯道场景的驾驶风格分类模型,实验结果显示,在过弯行为中激进驾驶占15.4%,其燃油消耗比正常驾驶高出约23%,并伴随动力系统效率的下降. Lin等[29 ] 提出基于随机森林回归和驾驶风格、车辆状态等多特征融合的方法来估算车辆的瞬时能耗,实验结果表明,油门踏板的踩踏频率、幅度越大以及加速度变化越快,对能耗的影响越大. 赵佳伟等[30 ] 的实验表明,不同的驾驶风格导致制动损耗和传动效率不同,将间接影响燃油经济性. 综上所述,冷静型驾驶通过平稳控制车速,维持低水平的需求功率;适中型驾驶兼具平稳性与灵活性,通过平滑功率波动使能量分配更贴近系统效率最优曲线;而激进型驾驶因频繁高负荷需求迫使动力系统长期偏离高效工作区,使需求功率增大,车辆排放量升高. ...
驾驶风格对纯电动汽车能耗的影响
1
2021
... 驾驶风格具体表现为驾驶员在行驶过程中的一系列驾驶行为,如加/减速、转向及换挡等操作. Mei等[25 ] 揭示了驾驶风格分类与识别方法研究中存在的若干制约因素,包括分类标准不统一、有效数据标注难度较大,以及特征选择和提取过程对领域知识与经验的依赖. 为了应对这些挑战,一些研究利用数据驱动的机器学习算法进行驾驶风格的自动分类,以量化驾驶风格,揭示不同驾驶风格对HEV功率和能耗特性的影响[26 -27 ] . Mohammadnazar等[28 ] 基于机器学习方法构建面向弯道场景的驾驶风格分类模型,实验结果显示,在过弯行为中激进驾驶占15.4%,其燃油消耗比正常驾驶高出约23%,并伴随动力系统效率的下降. Lin等[29 ] 提出基于随机森林回归和驾驶风格、车辆状态等多特征融合的方法来估算车辆的瞬时能耗,实验结果表明,油门踏板的踩踏频率、幅度越大以及加速度变化越快,对能耗的影响越大. 赵佳伟等[30 ] 的实验表明,不同的驾驶风格导致制动损耗和传动效率不同,将间接影响燃油经济性. 综上所述,冷静型驾驶通过平稳控制车速,维持低水平的需求功率;适中型驾驶兼具平稳性与灵活性,通过平滑功率波动使能量分配更贴近系统效率最优曲线;而激进型驾驶因频繁高负荷需求迫使动力系统长期偏离高效工作区,使需求功率增大,车辆排放量升高. ...
驾驶风格对纯电动汽车能耗的影响
1
2021
... 驾驶风格具体表现为驾驶员在行驶过程中的一系列驾驶行为,如加/减速、转向及换挡等操作. Mei等[25 ] 揭示了驾驶风格分类与识别方法研究中存在的若干制约因素,包括分类标准不统一、有效数据标注难度较大,以及特征选择和提取过程对领域知识与经验的依赖. 为了应对这些挑战,一些研究利用数据驱动的机器学习算法进行驾驶风格的自动分类,以量化驾驶风格,揭示不同驾驶风格对HEV功率和能耗特性的影响[26 -27 ] . Mohammadnazar等[28 ] 基于机器学习方法构建面向弯道场景的驾驶风格分类模型,实验结果显示,在过弯行为中激进驾驶占15.4%,其燃油消耗比正常驾驶高出约23%,并伴随动力系统效率的下降. Lin等[29 ] 提出基于随机森林回归和驾驶风格、车辆状态等多特征融合的方法来估算车辆的瞬时能耗,实验结果表明,油门踏板的踩踏频率、幅度越大以及加速度变化越快,对能耗的影响越大. 赵佳伟等[30 ] 的实验表明,不同的驾驶风格导致制动损耗和传动效率不同,将间接影响燃油经济性. 综上所述,冷静型驾驶通过平稳控制车速,维持低水平的需求功率;适中型驾驶兼具平稳性与灵活性,通过平滑功率波动使能量分配更贴近系统效率最优曲线;而激进型驾驶因频繁高负荷需求迫使动力系统长期偏离高效工作区,使需求功率增大,车辆排放量升高. ...
Development of a typical driving cycle for an intra-city hybrid electric bus with a fixed route
1
2018
... 行驶工况表征车辆在某一时间序列内的车速或加速度的时序分布特征,可以用于评估和分析车辆的实际能耗水平[31 ] . 根据平均车速、加速度标准差及怠速时间占比等特征参数[32 ] ,将行驶工况划分为市区、郊区及高速3类典型工况,且混合动力系统的能耗与这些行驶工况的特征参数间存在显著的非线性关系. Madhusudhanan等[33 ] 发现随着平均车速的提高,能耗先降低后升高,且存在最优平均车速,使得能耗值最低. Ji等[34 ] 也发现,当汽车行驶于不同工况时,其行驶特征参数存在显著差异. 研究表明,在市区工况下,频繁启停与剧烈的加速度波动导致需求功率增加;在郊区工况下,因车速稳定且加速度平缓,动力系统覆盖最优效率区间,能耗相对较低,相比于市区工况降低了15%~20%;在高速工况下,尽管发动机效率提升,但是车速的提高导致空气阻力非线性增长,使得综合能耗较郊区工况增加了10%~15%. 因此,在不同的行驶工况下,行车特征参数差异会导致HEV的需求功率不同,从而影响能耗. ...
Effect of road slope on driving cycle parameters of urban roads
1
2023
... 行驶工况表征车辆在某一时间序列内的车速或加速度的时序分布特征,可以用于评估和分析车辆的实际能耗水平[31 ] . 根据平均车速、加速度标准差及怠速时间占比等特征参数[32 ] ,将行驶工况划分为市区、郊区及高速3类典型工况,且混合动力系统的能耗与这些行驶工况的特征参数间存在显著的非线性关系. Madhusudhanan等[33 ] 发现随着平均车速的提高,能耗先降低后升高,且存在最优平均车速,使得能耗值最低. Ji等[34 ] 也发现,当汽车行驶于不同工况时,其行驶特征参数存在显著差异. 研究表明,在市区工况下,频繁启停与剧烈的加速度波动导致需求功率增加;在郊区工况下,因车速稳定且加速度平缓,动力系统覆盖最优效率区间,能耗相对较低,相比于市区工况降低了15%~20%;在高速工况下,尽管发动机效率提升,但是车速的提高导致空气阻力非线性增长,使得综合能耗较郊区工况增加了10%~15%. 因此,在不同的行驶工况下,行车特征参数差异会导致HEV的需求功率不同,从而影响能耗. ...
Effect of a traffic speed based cruise control on an electric vehicle’s performance and an energy consumption model of an electric vehicle
1
2020
... 行驶工况表征车辆在某一时间序列内的车速或加速度的时序分布特征,可以用于评估和分析车辆的实际能耗水平[31 ] . 根据平均车速、加速度标准差及怠速时间占比等特征参数[32 ] ,将行驶工况划分为市区、郊区及高速3类典型工况,且混合动力系统的能耗与这些行驶工况的特征参数间存在显著的非线性关系. Madhusudhanan等[33 ] 发现随着平均车速的提高,能耗先降低后升高,且存在最优平均车速,使得能耗值最低. Ji等[34 ] 也发现,当汽车行驶于不同工况时,其行驶特征参数存在显著差异. 研究表明,在市区工况下,频繁启停与剧烈的加速度波动导致需求功率增加;在郊区工况下,因车速稳定且加速度平缓,动力系统覆盖最优效率区间,能耗相对较低,相比于市区工况降低了15%~20%;在高速工况下,尽管发动机效率提升,但是车速的提高导致空气阻力非线性增长,使得综合能耗较郊区工况增加了10%~15%. 因此,在不同的行驶工况下,行车特征参数差异会导致HEV的需求功率不同,从而影响能耗. ...
Driving condition recognition combined with stochastic prediction and machine learning and its application in energy management of medium fuel cell trucks
1
2023
... 行驶工况表征车辆在某一时间序列内的车速或加速度的时序分布特征,可以用于评估和分析车辆的实际能耗水平[31 ] . 根据平均车速、加速度标准差及怠速时间占比等特征参数[32 ] ,将行驶工况划分为市区、郊区及高速3类典型工况,且混合动力系统的能耗与这些行驶工况的特征参数间存在显著的非线性关系. Madhusudhanan等[33 ] 发现随着平均车速的提高,能耗先降低后升高,且存在最优平均车速,使得能耗值最低. Ji等[34 ] 也发现,当汽车行驶于不同工况时,其行驶特征参数存在显著差异. 研究表明,在市区工况下,频繁启停与剧烈的加速度波动导致需求功率增加;在郊区工况下,因车速稳定且加速度平缓,动力系统覆盖最优效率区间,能耗相对较低,相比于市区工况降低了15%~20%;在高速工况下,尽管发动机效率提升,但是车速的提高导致空气阻力非线性增长,使得综合能耗较郊区工况增加了10%~15%. 因此,在不同的行驶工况下,行车特征参数差异会导致HEV的需求功率不同,从而影响能耗. ...
1
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
Comparison of energy consumption between hybrid and electric vehicles under real-world driving conditions
1
2024
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
1
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
1
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
Electric vehicles’ energy consumption measurement and estimation
1
2015
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
A comparative study of energy-oriented driving strategy for connected electric vehicles on freeways with varying slopes
1
2024
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
基于改进动态规划法的HEV多目标能量管理策略
1
2022
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
基于改进动态规划法的HEV多目标能量管理策略
1
2022
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
Fast dynamic-programming algorithm for solving global optimization problems of hybrid electric vehicles
1
2023
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
Battery warm-up methodologies at subzero temperatures for automotive applications: recent advances and perspectives
1
2020
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
Effects of temperature on the performance of fuel cell hybrid electric vehicles: a review
1
2021
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
A model-free combined energy and thermal management strategy for HEVs based on reinforcement-learning under low-temperature
1
2025
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
A novel energy management strategy for PHEV considering cabin heat demand under low temperature based on reinforcement learning
1
2025
... 道路环境在HEV能耗的影响因素中也占据关键地位. 道路坡度通过纵向动力学机制显著影响能量分配效率与系统损耗. 当车辆在上坡过程中频繁启动、停靠时,电机进入堵转状态,引发瞬时功率需求激增,造成电池能量非预期损耗[35 -36 ] ;在车辆下坡过程中,再生制动系统因机械-电能转换效率限制,仅能够回收部分重力势能损失,而剩余能量以热能形式耗散[37 ] . Wu等[38 ] 分析车辆的功率与道路坡度之间的关系,提出电动汽车的瞬时功率和行程能耗估计模型,通过比较40多次行程的实测能耗与估算能耗,验证了该模型的准确性. Li等[39 ] 针对不同坡度的高速公路提出2种实时的EMS;实验中,相比于未考虑坡度的动态规划(dynamic programing, DP)策略[40 -41 ] 和恒定速度策略,燃油经济性分别提高了8.23%和11.64%. 除道路坡度外,环境温度尤其是低温条件,亦对HEV能量效率和动力系统性能的提升构成了挑战. 低温会显著降低锂离子电池的可用容量和功率输出,导致续航里程缩减,甚至可能因活性锂沉积而加速电池老化[42 ] . 燃料电池在低温下也面临启动困难的挑战,而高温可能引发电池副反应和燃料电池堆效率下降等问题[43 ] . Li等[44 -45 ] 针对HEV在低温环境下的运行,分别基于双延迟深度确定性策略梯度和双深度Q学习算法,提出能量与热管理联合策略以及考虑座舱热需求的EMS. 这2项研究将环境温度纳入EMS状态空间,构建发动机-电池-座舱耦合热管理系统模型. 实验结果表明,与未考虑温度的策略相比,联合热管理的策略在燃油经济性、电池寿命保护、SOC稳定性以及环境适应性方面均表现出显著的性能提升. ...
Energy consumption estimation method of battery electric buses based on real-world driving data
1
2024
... 综上,行车信息通过影响HEV的功率需求、能量转换效率和运行状态,与整车能耗、排放水平紧密关联. 驾驶风格决定了加速模式与功率波动;行驶工况通过车速和负载变化影响动力系统效率区间;道路环境通过影响坡道阻力大小、环境温度,直接影响驱动功率需求以及HEV动力系统的性能. 这些因素在真实驾驶中并非独立作用,而是存在明显的耦合效应:当激进驾驶叠加市区拥堵路况时,能耗波动会被进一步放大;陡坡路段结合交通流突变,会大幅增加能量管理的复杂度[46 ] . 研究表明,当多源行车信息共同作用于车辆的动力系统时,其能耗水平呈现出复杂的非线性变化规律[47 ] . 因此,利用行车信息优化EMS,并通过智能控制方法实现动态功率分配,是提升燃油经济性和降低排放量的关键方向. ...
A stability-guaranteed and energy-conserving torque distribution strategy for electric vehicles under extreme conditions
1
2020
... 综上,行车信息通过影响HEV的功率需求、能量转换效率和运行状态,与整车能耗、排放水平紧密关联. 驾驶风格决定了加速模式与功率波动;行驶工况通过车速和负载变化影响动力系统效率区间;道路环境通过影响坡道阻力大小、环境温度,直接影响驱动功率需求以及HEV动力系统的性能. 这些因素在真实驾驶中并非独立作用,而是存在明显的耦合效应:当激进驾驶叠加市区拥堵路况时,能耗波动会被进一步放大;陡坡路段结合交通流突变,会大幅增加能量管理的复杂度[46 ] . 研究表明,当多源行车信息共同作用于车辆的动力系统时,其能耗水平呈现出复杂的非线性变化规律[47 ] . 因此,利用行车信息优化EMS,并通过智能控制方法实现动态功率分配,是提升燃油经济性和降低排放量的关键方向. ...
Review article: a comprehensive review of energy management strategies for hybrid electric vehicles
1
2022
... 当前主流的EMS主要分为3类[48 -49 ] :基于规则、基于优化和基于DRL的策略. ...
A comparative study of deep reinforcement learning based energy management strategy for hybrid electric vehicle
1
2023
... 当前主流的EMS主要分为3类[48 -49 ] :基于规则、基于优化和基于DRL的策略. ...
Energy management strategies for hybrid electric vehicles: review, classification, comparison, and outlook
1
2020
... 传统框架下的EMS以静态或半静态的方式分配动力源的功率[50 ] . 这类方法能够在已知环境下有效运行,相比于基于学习的方法更简单、实用. 目前国内外不少HEV仍然采用此类控制方法[51 -52 ] ,但是其最大的缺点是缺乏对未知环境的适应能力. 行车信息作为动态环境的反馈,在传统的基于规则或优化的策略中被用于校准规则参数或优化模型输入,从而确保策略在不同驾驶场景下的有效性[53 ] . 例如,基于规则的方法根据历史数据统计结果和行驶工况,设置电池充放电阈值来实现规则阈值的动态调整;基于优化的方法利用预测的未来车速序列构建目标函数和约束条件,在滚动时域内动态求解最优功率分配策略[54 ] . ...
Fuel economy optimization of power split hybrid vehicles: a rapid dynamic programming approach
1
2019
... 传统框架下的EMS以静态或半静态的方式分配动力源的功率[50 ] . 这类方法能够在已知环境下有效运行,相比于基于学习的方法更简单、实用. 目前国内外不少HEV仍然采用此类控制方法[51 -52 ] ,但是其最大的缺点是缺乏对未知环境的适应能力. 行车信息作为动态环境的反馈,在传统的基于规则或优化的策略中被用于校准规则参数或优化模型输入,从而确保策略在不同驾驶场景下的有效性[53 ] . 例如,基于规则的方法根据历史数据统计结果和行驶工况,设置电池充放电阈值来实现规则阈值的动态调整;基于优化的方法利用预测的未来车速序列构建目标函数和约束条件,在滚动时域内动态求解最优功率分配策略[54 ] . ...
Rule and optimization combined real-time energy management strategy for minimizing cost of fuel cell hybrid electric vehicles
1
2023
... 传统框架下的EMS以静态或半静态的方式分配动力源的功率[50 ] . 这类方法能够在已知环境下有效运行,相比于基于学习的方法更简单、实用. 目前国内外不少HEV仍然采用此类控制方法[51 -52 ] ,但是其最大的缺点是缺乏对未知环境的适应能力. 行车信息作为动态环境的反馈,在传统的基于规则或优化的策略中被用于校准规则参数或优化模型输入,从而确保策略在不同驾驶场景下的有效性[53 ] . 例如,基于规则的方法根据历史数据统计结果和行驶工况,设置电池充放电阈值来实现规则阈值的动态调整;基于优化的方法利用预测的未来车速序列构建目标函数和约束条件,在滚动时域内动态求解最优功率分配策略[54 ] . ...
Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming
1
2015
... 传统框架下的EMS以静态或半静态的方式分配动力源的功率[50 ] . 这类方法能够在已知环境下有效运行,相比于基于学习的方法更简单、实用. 目前国内外不少HEV仍然采用此类控制方法[51 -52 ] ,但是其最大的缺点是缺乏对未知环境的适应能力. 行车信息作为动态环境的反馈,在传统的基于规则或优化的策略中被用于校准规则参数或优化模型输入,从而确保策略在不同驾驶场景下的有效性[53 ] . 例如,基于规则的方法根据历史数据统计结果和行驶工况,设置电池充放电阈值来实现规则阈值的动态调整;基于优化的方法利用预测的未来车速序列构建目标函数和约束条件,在滚动时域内动态求解最优功率分配策略[54 ] . ...
MPC-based energy management with short-term driving condition prediction for a plug-in hybrid electric truck
1
2023
... 传统框架下的EMS以静态或半静态的方式分配动力源的功率[50 ] . 这类方法能够在已知环境下有效运行,相比于基于学习的方法更简单、实用. 目前国内外不少HEV仍然采用此类控制方法[51 -52 ] ,但是其最大的缺点是缺乏对未知环境的适应能力. 行车信息作为动态环境的反馈,在传统的基于规则或优化的策略中被用于校准规则参数或优化模型输入,从而确保策略在不同驾驶场景下的有效性[53 ] . 例如,基于规则的方法根据历史数据统计结果和行驶工况,设置电池充放电阈值来实现规则阈值的动态调整;基于优化的方法利用预测的未来车速序列构建目标函数和约束条件,在滚动时域内动态求解最优功率分配策略[54 ] . ...
Deep reinforcement learning based energy management for a hybrid electric vehicle
1
2020
... 基于端到端控制策略,HEV能够直接在复杂交通环境中实现从原始感知数据到控制指令的实时映射[55 ] . 将行车信息作为核心驱动要素,通过构建状态空间的维度体系,提升状态表征的时效性与感知精度,从而增强智能体对环境状态的辨识能力和策略泛化能力[56 ] . DRL能够将行驶环境中的多源信息作为状态空间的核心维度加以整合,其中车辆当前速度和加速度反映了动力需求的瞬时变化,SOC和电机功率需求刻画了车辆能量存储及输出能力的实时状况,前车间距、前车速度以及道路拥堵指数等交通信息为智能体提供了对周边流量分布与潜在风险的洞察能力,道路坡度、曲线半径、实时路段限速信息以及环境温度等要素补充了车辆在不同道路环境下的能耗特征. 此外,车辆姿态、方向盘角度、驾驶员操作意图(如加速踏板开度)等信息被纳入状态空间,以增强策略对驾驶行为变化的敏感度. 进一步地,可以将行车信息作为跨域协同的数据枢纽,依托车云协同实时上传的百万级车辆信息,构建覆盖全域驾驶场景的世界模型[57 ] ,为DRL策略的预训练提供高保真仿真环境. 通过结合大语言模型,解析驾驶员指令(如“长途节能优先”),动态重构奖励函数权重,以实现语义化需求与EMS的精准对齐[58 ] ;通过云平台整合交通流量预测、电网负荷调度及路网拓扑信息,突破单车管理局限,在全局层面上平衡能源效率与碳排放目标[59 ] . 行车信息推动多粒度协同机制的发展,使能量管理从孤立数据驱动模式向生态化智能协同范式升级. ...
A review on the applications of driving data and traffic information for vehicles’ energy conservation
1
2014
... 基于端到端控制策略,HEV能够直接在复杂交通环境中实现从原始感知数据到控制指令的实时映射[55 ] . 将行车信息作为核心驱动要素,通过构建状态空间的维度体系,提升状态表征的时效性与感知精度,从而增强智能体对环境状态的辨识能力和策略泛化能力[56 ] . DRL能够将行驶环境中的多源信息作为状态空间的核心维度加以整合,其中车辆当前速度和加速度反映了动力需求的瞬时变化,SOC和电机功率需求刻画了车辆能量存储及输出能力的实时状况,前车间距、前车速度以及道路拥堵指数等交通信息为智能体提供了对周边流量分布与潜在风险的洞察能力,道路坡度、曲线半径、实时路段限速信息以及环境温度等要素补充了车辆在不同道路环境下的能耗特征. 此外,车辆姿态、方向盘角度、驾驶员操作意图(如加速踏板开度)等信息被纳入状态空间,以增强策略对驾驶行为变化的敏感度. 进一步地,可以将行车信息作为跨域协同的数据枢纽,依托车云协同实时上传的百万级车辆信息,构建覆盖全域驾驶场景的世界模型[57 ] ,为DRL策略的预训练提供高保真仿真环境. 通过结合大语言模型,解析驾驶员指令(如“长途节能优先”),动态重构奖励函数权重,以实现语义化需求与EMS的精准对齐[58 ] ;通过云平台整合交通流量预测、电网负荷调度及路网拓扑信息,突破单车管理局限,在全局层面上平衡能源效率与碳排放目标[59 ] . 行车信息推动多粒度协同机制的发展,使能量管理从孤立数据驱动模式向生态化智能协同范式升级. ...
Cloud-edge-device collaborative reliable and communication-efficient digital twin for low-carbon electrical equipment management
1
2023
... 基于端到端控制策略,HEV能够直接在复杂交通环境中实现从原始感知数据到控制指令的实时映射[55 ] . 将行车信息作为核心驱动要素,通过构建状态空间的维度体系,提升状态表征的时效性与感知精度,从而增强智能体对环境状态的辨识能力和策略泛化能力[56 ] . DRL能够将行驶环境中的多源信息作为状态空间的核心维度加以整合,其中车辆当前速度和加速度反映了动力需求的瞬时变化,SOC和电机功率需求刻画了车辆能量存储及输出能力的实时状况,前车间距、前车速度以及道路拥堵指数等交通信息为智能体提供了对周边流量分布与潜在风险的洞察能力,道路坡度、曲线半径、实时路段限速信息以及环境温度等要素补充了车辆在不同道路环境下的能耗特征. 此外,车辆姿态、方向盘角度、驾驶员操作意图(如加速踏板开度)等信息被纳入状态空间,以增强策略对驾驶行为变化的敏感度. 进一步地,可以将行车信息作为跨域协同的数据枢纽,依托车云协同实时上传的百万级车辆信息,构建覆盖全域驾驶场景的世界模型[57 ] ,为DRL策略的预训练提供高保真仿真环境. 通过结合大语言模型,解析驾驶员指令(如“长途节能优先”),动态重构奖励函数权重,以实现语义化需求与EMS的精准对齐[58 ] ;通过云平台整合交通流量预测、电网负荷调度及路网拓扑信息,突破单车管理局限,在全局层面上平衡能源效率与碳排放目标[59 ] . 行车信息推动多粒度协同机制的发展,使能量管理从孤立数据驱动模式向生态化智能协同范式升级. ...
Integrating LLMs with ITS: recent advances, potentials, challenges, and future directions
1
2025
... 基于端到端控制策略,HEV能够直接在复杂交通环境中实现从原始感知数据到控制指令的实时映射[55 ] . 将行车信息作为核心驱动要素,通过构建状态空间的维度体系,提升状态表征的时效性与感知精度,从而增强智能体对环境状态的辨识能力和策略泛化能力[56 ] . DRL能够将行驶环境中的多源信息作为状态空间的核心维度加以整合,其中车辆当前速度和加速度反映了动力需求的瞬时变化,SOC和电机功率需求刻画了车辆能量存储及输出能力的实时状况,前车间距、前车速度以及道路拥堵指数等交通信息为智能体提供了对周边流量分布与潜在风险的洞察能力,道路坡度、曲线半径、实时路段限速信息以及环境温度等要素补充了车辆在不同道路环境下的能耗特征. 此外,车辆姿态、方向盘角度、驾驶员操作意图(如加速踏板开度)等信息被纳入状态空间,以增强策略对驾驶行为变化的敏感度. 进一步地,可以将行车信息作为跨域协同的数据枢纽,依托车云协同实时上传的百万级车辆信息,构建覆盖全域驾驶场景的世界模型[57 ] ,为DRL策略的预训练提供高保真仿真环境. 通过结合大语言模型,解析驾驶员指令(如“长途节能优先”),动态重构奖励函数权重,以实现语义化需求与EMS的精准对齐[58 ] ;通过云平台整合交通流量预测、电网负荷调度及路网拓扑信息,突破单车管理局限,在全局层面上平衡能源效率与碳排放目标[59 ] . 行车信息推动多粒度协同机制的发展,使能量管理从孤立数据驱动模式向生态化智能协同范式升级. ...
Practical application of energy management strategy for hybrid electric vehicles based on intelligent and connected technologies: development stages, challenges, and future trends
1
2022
... 基于端到端控制策略,HEV能够直接在复杂交通环境中实现从原始感知数据到控制指令的实时映射[55 ] . 将行车信息作为核心驱动要素,通过构建状态空间的维度体系,提升状态表征的时效性与感知精度,从而增强智能体对环境状态的辨识能力和策略泛化能力[56 ] . DRL能够将行驶环境中的多源信息作为状态空间的核心维度加以整合,其中车辆当前速度和加速度反映了动力需求的瞬时变化,SOC和电机功率需求刻画了车辆能量存储及输出能力的实时状况,前车间距、前车速度以及道路拥堵指数等交通信息为智能体提供了对周边流量分布与潜在风险的洞察能力,道路坡度、曲线半径、实时路段限速信息以及环境温度等要素补充了车辆在不同道路环境下的能耗特征. 此外,车辆姿态、方向盘角度、驾驶员操作意图(如加速踏板开度)等信息被纳入状态空间,以增强策略对驾驶行为变化的敏感度. 进一步地,可以将行车信息作为跨域协同的数据枢纽,依托车云协同实时上传的百万级车辆信息,构建覆盖全域驾驶场景的世界模型[57 ] ,为DRL策略的预训练提供高保真仿真环境. 通过结合大语言模型,解析驾驶员指令(如“长途节能优先”),动态重构奖励函数权重,以实现语义化需求与EMS的精准对齐[58 ] ;通过云平台整合交通流量预测、电网负荷调度及路网拓扑信息,突破单车管理局限,在全局层面上平衡能源效率与碳排放目标[59 ] . 行车信息推动多粒度协同机制的发展,使能量管理从孤立数据驱动模式向生态化智能协同范式升级. ...
1
... 行车信息由车辆本体状态参数与外部环境数据共同构成,其动态特性体现为驾驶员的行为特征、动力系统的运行状态以及车辆与交通环境的交互作用. 车载传感器通过控制器局域网(controller area network, CAN)总线与惯性测量单元实时采集自车状态数据,ITS依托车车通信(vehicle-to-vehicle, V2V)[60 ] 和车路通信(vehicle-to-infrastructure, V2I)[61 ] 技术获取周边车辆速度、交通信号相位及道路拓扑信息. 其中,V2V技术在车辆间直接交换位置、速度等信息,能够提供实时的环境车辆反馈信息;V2I技术通过与信号灯、摄像头等交通基础设施的互联互通,实现道路条件、交通流量及信号相位等信息的实时获取. 通过对这些多源数据进行时空对齐与特征融合(流程详见图2 ),为EMS提供决策依据. ...
Efficient energy management strategy for hybrid electric vehicles/plug-in hybrid electric vehicles: review and recent advances under intelligent transportation system
1
2020
... 行车信息由车辆本体状态参数与外部环境数据共同构成,其动态特性体现为驾驶员的行为特征、动力系统的运行状态以及车辆与交通环境的交互作用. 车载传感器通过控制器局域网(controller area network, CAN)总线与惯性测量单元实时采集自车状态数据,ITS依托车车通信(vehicle-to-vehicle, V2V)[60 ] 和车路通信(vehicle-to-infrastructure, V2I)[61 ] 技术获取周边车辆速度、交通信号相位及道路拓扑信息. 其中,V2V技术在车辆间直接交换位置、速度等信息,能够提供实时的环境车辆反馈信息;V2I技术通过与信号灯、摄像头等交通基础设施的互联互通,实现道路条件、交通流量及信号相位等信息的实时获取. 通过对这些多源数据进行时空对齐与特征融合(流程详见图2 ),为EMS提供决策依据. ...
智能网联混合动力汽车能量管理研究综述
1
2023
... 在传统框架下,考虑到行车信息对能耗的影响,EMS需要结合行车信息来提高整车的燃油经济性以及对各种交通场景的适应性. 不少学者将驾驶风格、行驶工况等单一的行车信息与EMS相结合,以增强控制策略的适应性和效率[62 ] ,并逐步探索EMS中多源信息的融合,以实现更精准的能量管理. ...
智能网联混合动力汽车能量管理研究综述
1
2023
... 在传统框架下,考虑到行车信息对能耗的影响,EMS需要结合行车信息来提高整车的燃油经济性以及对各种交通场景的适应性. 不少学者将驾驶风格、行驶工况等单一的行车信息与EMS相结合,以增强控制策略的适应性和效率[62 ] ,并逐步探索EMS中多源信息的融合,以实现更精准的能量管理. ...
实际路况下PHEV等效油耗降低策略研究
2
2023
... 基于规则的方法依靠预设的规则集合以及专家经验来解决能量管理问题. 学术界将行车信息嵌入规则驱动型控制架构,以提高EMS的优化效果. 彭美春等[63 ] 从实车行驶数据中提取典型工况,构建涵盖多种路况的仿真场景,设计逻辑门阈值EMS,并利用遗传算法优化控制参数;实验表明,优化后等效综合油耗降低了6.02%. Wang等[64 ] 采用遗传算法优化典型工况下的模糊逻辑控制隶属函数,相较于传统的模糊逻辑控制策略,显著提高了燃油经济性. 陈勇等[65 ] 根据所识别的工况类型,以SOC与整车需求功率为输入,以发动机功率为输出,调整隶属度函数的顶点坐标,设计自适应模糊规则EMS;相比于基于规则的传统策略,油耗降低了9.67%. 以上方法融合了在线规则控制的实时性与工程实用性优势,同时通过离线优化策略获取全局最优解,有效缓解了传统规则方法对专家经验的过度依赖,并通过工况自适应的参数更新机制提升了环境适应性. 然而,此类混合方法对未知复杂场景的适应能力仍然不足,且离线优化过程因依赖于历史数据训练而易受其偏差影响,可能导致策略的泛化性能下降. ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
实际路况下PHEV等效油耗降低策略研究
2
2023
... 基于规则的方法依靠预设的规则集合以及专家经验来解决能量管理问题. 学术界将行车信息嵌入规则驱动型控制架构,以提高EMS的优化效果. 彭美春等[63 ] 从实车行驶数据中提取典型工况,构建涵盖多种路况的仿真场景,设计逻辑门阈值EMS,并利用遗传算法优化控制参数;实验表明,优化后等效综合油耗降低了6.02%. Wang等[64 ] 采用遗传算法优化典型工况下的模糊逻辑控制隶属函数,相较于传统的模糊逻辑控制策略,显著提高了燃油经济性. 陈勇等[65 ] 根据所识别的工况类型,以SOC与整车需求功率为输入,以发动机功率为输出,调整隶属度函数的顶点坐标,设计自适应模糊规则EMS;相比于基于规则的传统策略,油耗降低了9.67%. 以上方法融合了在线规则控制的实时性与工程实用性优势,同时通过离线优化策略获取全局最优解,有效缓解了传统规则方法对专家经验的过度依赖,并通过工况自适应的参数更新机制提升了环境适应性. 然而,此类混合方法对未知复杂场景的适应能力仍然不足,且离线优化过程因依赖于历史数据训练而易受其偏差影响,可能导致策略的泛化性能下降. ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
Genetic algorithm-based fuzzy optimization of energy management strategy for fuel cell vehicles considering driving cycles recognition
2
2023
... 基于规则的方法依靠预设的规则集合以及专家经验来解决能量管理问题. 学术界将行车信息嵌入规则驱动型控制架构,以提高EMS的优化效果. 彭美春等[63 ] 从实车行驶数据中提取典型工况,构建涵盖多种路况的仿真场景,设计逻辑门阈值EMS,并利用遗传算法优化控制参数;实验表明,优化后等效综合油耗降低了6.02%. Wang等[64 ] 采用遗传算法优化典型工况下的模糊逻辑控制隶属函数,相较于传统的模糊逻辑控制策略,显著提高了燃油经济性. 陈勇等[65 ] 根据所识别的工况类型,以SOC与整车需求功率为输入,以发动机功率为输出,调整隶属度函数的顶点坐标,设计自适应模糊规则EMS;相比于基于规则的传统策略,油耗降低了9.67%. 以上方法融合了在线规则控制的实时性与工程实用性优势,同时通过离线优化策略获取全局最优解,有效缓解了传统规则方法对专家经验的过度依赖,并通过工况自适应的参数更新机制提升了环境适应性. 然而,此类混合方法对未知复杂场景的适应能力仍然不足,且离线优化过程因依赖于历史数据训练而易受其偏差影响,可能导致策略的泛化性能下降. ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
融合工况识别的增程式电动汽车模糊能量管理策略研究
2
2022
... 基于规则的方法依靠预设的规则集合以及专家经验来解决能量管理问题. 学术界将行车信息嵌入规则驱动型控制架构,以提高EMS的优化效果. 彭美春等[63 ] 从实车行驶数据中提取典型工况,构建涵盖多种路况的仿真场景,设计逻辑门阈值EMS,并利用遗传算法优化控制参数;实验表明,优化后等效综合油耗降低了6.02%. Wang等[64 ] 采用遗传算法优化典型工况下的模糊逻辑控制隶属函数,相较于传统的模糊逻辑控制策略,显著提高了燃油经济性. 陈勇等[65 ] 根据所识别的工况类型,以SOC与整车需求功率为输入,以发动机功率为输出,调整隶属度函数的顶点坐标,设计自适应模糊规则EMS;相比于基于规则的传统策略,油耗降低了9.67%. 以上方法融合了在线规则控制的实时性与工程实用性优势,同时通过离线优化策略获取全局最优解,有效缓解了传统规则方法对专家经验的过度依赖,并通过工况自适应的参数更新机制提升了环境适应性. 然而,此类混合方法对未知复杂场景的适应能力仍然不足,且离线优化过程因依赖于历史数据训练而易受其偏差影响,可能导致策略的泛化性能下降. ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
融合工况识别的增程式电动汽车模糊能量管理策略研究
2
2022
... 基于规则的方法依靠预设的规则集合以及专家经验来解决能量管理问题. 学术界将行车信息嵌入规则驱动型控制架构,以提高EMS的优化效果. 彭美春等[63 ] 从实车行驶数据中提取典型工况,构建涵盖多种路况的仿真场景,设计逻辑门阈值EMS,并利用遗传算法优化控制参数;实验表明,优化后等效综合油耗降低了6.02%. Wang等[64 ] 采用遗传算法优化典型工况下的模糊逻辑控制隶属函数,相较于传统的模糊逻辑控制策略,显著提高了燃油经济性. 陈勇等[65 ] 根据所识别的工况类型,以SOC与整车需求功率为输入,以发动机功率为输出,调整隶属度函数的顶点坐标,设计自适应模糊规则EMS;相比于基于规则的传统策略,油耗降低了9.67%. 以上方法融合了在线规则控制的实时性与工程实用性优势,同时通过离线优化策略获取全局最优解,有效缓解了传统规则方法对专家经验的过度依赖,并通过工况自适应的参数更新机制提升了环境适应性. 然而,此类混合方法对未知复杂场景的适应能力仍然不足,且离线优化过程因依赖于历史数据训练而易受其偏差影响,可能导致策略的泛化性能下降. ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
2
... 随着多源异构行车数据采集技术的进步,研究者通过有效整合驾驶风格、行驶工况及道路环境等多维度信息,开发出适应性更强的EMS. 刘浩[66 ] 从海量驾驶数据中提取融合工况特征与驾驶风格因子的综合循环工况,采用粒子群优化算法对策略的阈值参数进行动态校准,构建基于多源信息耦合的阈值自适应控制框架;实验证明所提EMS的综合经济性相对于基于规则的EMS降低了约9.47%. 邱明明等[67 ] 通过工况类型识别与驾驶风格聚类分析,建立制动扭矩随工况特征与驾驶风格动态调整的修正模型,设计基于多条件逻辑阈值的制动能量回收策略,从而提升整车的经济性. 此类规则驱动型多源融合策略在继承专家经验规则库的基础上,利用优化算法动态调整逻辑阈值,从而实现了控制参数与环境特征的自适应匹配. 然而,此类策略仍然面临挑战:多维度信息间的非线性耦合关系难以被解析、建模,且专家经验阈值与环境特征的动态映射机制缺乏理论支撑. 因此,发展基于数据驱动的专家经验量化模型,建立行车信息与控制阈值间的显式映射关系,将成为提升该策略环境适应性的重点方向. 利用行车信息来优化基于规则的EMS的特点及其局限性见表1 . ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
2
... 随着多源异构行车数据采集技术的进步,研究者通过有效整合驾驶风格、行驶工况及道路环境等多维度信息,开发出适应性更强的EMS. 刘浩[66 ] 从海量驾驶数据中提取融合工况特征与驾驶风格因子的综合循环工况,采用粒子群优化算法对策略的阈值参数进行动态校准,构建基于多源信息耦合的阈值自适应控制框架;实验证明所提EMS的综合经济性相对于基于规则的EMS降低了约9.47%. 邱明明等[67 ] 通过工况类型识别与驾驶风格聚类分析,建立制动扭矩随工况特征与驾驶风格动态调整的修正模型,设计基于多条件逻辑阈值的制动能量回收策略,从而提升整车的经济性. 此类规则驱动型多源融合策略在继承专家经验规则库的基础上,利用优化算法动态调整逻辑阈值,从而实现了控制参数与环境特征的自适应匹配. 然而,此类策略仍然面临挑战:多维度信息间的非线性耦合关系难以被解析、建模,且专家经验阈值与环境特征的动态映射机制缺乏理论支撑. 因此,发展基于数据驱动的专家经验量化模型,建立行车信息与控制阈值间的显式映射关系,将成为提升该策略环境适应性的重点方向. 利用行车信息来优化基于规则的EMS的特点及其局限性见表1 . ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
考虑工况和驾驶风格耦合影响的插电式混合动力汽车制动能量回收策略
2
2022
... 随着多源异构行车数据采集技术的进步,研究者通过有效整合驾驶风格、行驶工况及道路环境等多维度信息,开发出适应性更强的EMS. 刘浩[66 ] 从海量驾驶数据中提取融合工况特征与驾驶风格因子的综合循环工况,采用粒子群优化算法对策略的阈值参数进行动态校准,构建基于多源信息耦合的阈值自适应控制框架;实验证明所提EMS的综合经济性相对于基于规则的EMS降低了约9.47%. 邱明明等[67 ] 通过工况类型识别与驾驶风格聚类分析,建立制动扭矩随工况特征与驾驶风格动态调整的修正模型,设计基于多条件逻辑阈值的制动能量回收策略,从而提升整车的经济性. 此类规则驱动型多源融合策略在继承专家经验规则库的基础上,利用优化算法动态调整逻辑阈值,从而实现了控制参数与环境特征的自适应匹配. 然而,此类策略仍然面临挑战:多维度信息间的非线性耦合关系难以被解析、建模,且专家经验阈值与环境特征的动态映射机制缺乏理论支撑. 因此,发展基于数据驱动的专家经验量化模型,建立行车信息与控制阈值间的显式映射关系,将成为提升该策略环境适应性的重点方向. 利用行车信息来优化基于规则的EMS的特点及其局限性见表1 . ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
考虑工况和驾驶风格耦合影响的插电式混合动力汽车制动能量回收策略
2
2022
... 随着多源异构行车数据采集技术的进步,研究者通过有效整合驾驶风格、行驶工况及道路环境等多维度信息,开发出适应性更强的EMS. 刘浩[66 ] 从海量驾驶数据中提取融合工况特征与驾驶风格因子的综合循环工况,采用粒子群优化算法对策略的阈值参数进行动态校准,构建基于多源信息耦合的阈值自适应控制框架;实验证明所提EMS的综合经济性相对于基于规则的EMS降低了约9.47%. 邱明明等[67 ] 通过工况类型识别与驾驶风格聚类分析,建立制动扭矩随工况特征与驾驶风格动态调整的修正模型,设计基于多条件逻辑阈值的制动能量回收策略,从而提升整车的经济性. 此类规则驱动型多源融合策略在继承专家经验规则库的基础上,利用优化算法动态调整逻辑阈值,从而实现了控制参数与环境特征的自适应匹配. 然而,此类策略仍然面临挑战:多维度信息间的非线性耦合关系难以被解析、建模,且专家经验阈值与环境特征的动态映射机制缺乏理论支撑. 因此,发展基于数据驱动的专家经验量化模型,建立行车信息与控制阈值间的显式映射关系,将成为提升该策略环境适应性的重点方向. 利用行车信息来优化基于规则的EMS的特点及其局限性见表1 . ...
... Characteristics of methods for optimizing rule-based EMS using driving information
Tab.1 行车信息 方法 效果 优点 局限性 行驶工况 遗传算法+逻辑门限值[63 ] 、[64 ] 、[65 ] 控制参数寻优 离线优化,在线规则 离线优化方法依赖大量历史数据 驾驶风格+行驶工况 粒子群算法+逻辑门限值[66 ] 、[67 ] 优化阈值参数 提高EMS的精准性与整车经济性 难以对多源信息间的耦合关系以及
2.2. 基于优化的能量管理策略 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
基于自适应动态规划的HEV能量管理研究综述
1
2020
... 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
基于自适应动态规划的HEV能量管理研究综述
1
2020
... 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
Approximate Pontryagin’s minimum principle applied to the energy management of plug-in hybrid electric vehicles
1
2014
... 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
A survey on key techniques and development perspectives of equivalent consumption minimisation strategy for hybrid electric vehicles
1
2021
... 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
Model predictive control strategy for energy optimization of series-parallel hybrid electric vehicle
1
2018
... 基于优化的策略提供了将工程问题数学化的框架,具有坚实的理论基础,可以显式地处理各种物理约束和性能要求. 根据所利用信息的完备性,可以将基于优化的EMS总结为全局优化与瞬时优化方法[68 ] . 全局优化方法需要获得全局先验信息,主要算法有动态规划、庞特里亚金极小值原理(Pontryagin’s minimum principle, PMP)[69 ] 等. 全局优化方法的结果是全局最优,但是在实际情况下,由于无法获取完整的先验信息,此类算法的发展受到了限制. 基于瞬时优化的策略主要有等效燃油消耗最小策略(equivalent fuel consumption minimization strategy, ECMS)[70 ] 、模型预测控制(model predictive control, MPC)[71 ] 等. 基于瞬时优化的EMS关注实时的系统状态,从而获取某一时刻的瞬时最优解,可以提高实时性和在复杂场景下的应对能力,但是其中MPC的模型预测精度、ECMS的设计参数、高维度计算开销等要素会影响策略的控制性能,因此得到的结果多为次优解. ...
Driving-style-oriented adaptive equivalent consumption minimization strategies for HEVs
2
2018
... 驾驶风格的融合有效提升了策略的燃油经济性与环境适应能力. Yang等[72 ] 基于ECMS,将驾驶风格等级直接与等效因子表达式相加,得到驾驶风格对等效因子的影响规律,实验结果表明该方法的燃油经济性相比于ECMS可以提高1.20%~12.73%. 在建立驾驶风格与等效因子之间的线性关系后,部分研究进一步对该线性关系进行优化. Guo等[73 ] 采用混合粒子群-遗传算法优化驾驶风格与等效因子的线性关系;与传统ECMS相比,能耗减少了3.69%. 以上研究方法将驾驶风格与等效因子处理为线性映射,相较于未考虑驾驶风格的ECMS提高了燃油经济性. 但是由于等效因子受到诸多因素的影响,仅将驾驶风格显式或隐式地与等效因子结合难以建立最优调整策略. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
Adaptive optimal control based on driving style recognition for plug-in hybrid electric vehicle
2
2019
... 驾驶风格的融合有效提升了策略的燃油经济性与环境适应能力. Yang等[72 ] 基于ECMS,将驾驶风格等级直接与等效因子表达式相加,得到驾驶风格对等效因子的影响规律,实验结果表明该方法的燃油经济性相比于ECMS可以提高1.20%~12.73%. 在建立驾驶风格与等效因子之间的线性关系后,部分研究进一步对该线性关系进行优化. Guo等[73 ] 采用混合粒子群-遗传算法优化驾驶风格与等效因子的线性关系;与传统ECMS相比,能耗减少了3.69%. 以上研究方法将驾驶风格与等效因子处理为线性映射,相较于未考虑驾驶风格的ECMS提高了燃油经济性. 但是由于等效因子受到诸多因素的影响,仅将驾驶风格显式或隐式地与等效因子结合难以建立最优调整策略. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
Multi-mode predictive energy management for fuel cell hybrid electric vehicles using Markov driving pattern recognizer
2
2020
... 全局优化方法通常不适用于实时的EMS,但是仍然有研究者通过改变全局优化框架来提高DP算法的实时性. Zhou等[74 ] 根据离线DP优化结果调整不同工况类型下的MPC控制参数,再结合在线工况类型识别结果,离线选择1组MPC参数来处理相应驱动模式下的功率需求;实验表明,在不同驾驶场景(城区、高速、山区)下动态调整功率分配比例,可以提高对高速、城区等复杂行驶条件的适应性. Yang等[75 ] 根据不同的行驶工况,利用线性加权粒子优化算法对ECMS的等效因子进行离线优化,并将优化结果转换为二维数表,将其与在线策略结合,以实现能量管理;结果表明,在不同的电池SOC下,相比于基线算法,燃油经济性平均提高了16%. Fan等[76 ] 通过遗传算法求解不同工况类型下的等效因子,结合在线工况识别与离线优化结果,确定当前工况下的扭矩分配;与DP方法相比,在高功率需求场景下实现了14.82%的油耗降低. 以上EMS研究的核心思路是利用优化算法对控制参数进行离线优化,从而建立离线工况与控制参数匹配的数据库. 此类方法通过在线工况识别来动态切换控制参数,实现了具有工况特异性的能量管理优化,但是在保证系统鲁棒性与工程可行性的同时,仍然面临工况分类精度受限及跨场景适应性不足的挑战. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
Adaptive real-time optimal energy management strategy based on equivalent factors optimization for plug-in hybrid electric vehicle
2
2017
... 全局优化方法通常不适用于实时的EMS,但是仍然有研究者通过改变全局优化框架来提高DP算法的实时性. Zhou等[74 ] 根据离线DP优化结果调整不同工况类型下的MPC控制参数,再结合在线工况类型识别结果,离线选择1组MPC参数来处理相应驱动模式下的功率需求;实验表明,在不同驾驶场景(城区、高速、山区)下动态调整功率分配比例,可以提高对高速、城区等复杂行驶条件的适应性. Yang等[75 ] 根据不同的行驶工况,利用线性加权粒子优化算法对ECMS的等效因子进行离线优化,并将优化结果转换为二维数表,将其与在线策略结合,以实现能量管理;结果表明,在不同的电池SOC下,相比于基线算法,燃油经济性平均提高了16%. Fan等[76 ] 通过遗传算法求解不同工况类型下的等效因子,结合在线工况识别与离线优化结果,确定当前工况下的扭矩分配;与DP方法相比,在高功率需求场景下实现了14.82%的油耗降低. 以上EMS研究的核心思路是利用优化算法对控制参数进行离线优化,从而建立离线工况与控制参数匹配的数据库. 此类方法通过在线工况识别来动态切换控制参数,实现了具有工况特异性的能量管理优化,但是在保证系统鲁棒性与工程可行性的同时,仍然面临工况分类精度受限及跨场景适应性不足的挑战. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
A GA-based online real-time optimized energy management strategy for plug-in hybrid electric vehicles
2
2022
... 全局优化方法通常不适用于实时的EMS,但是仍然有研究者通过改变全局优化框架来提高DP算法的实时性. Zhou等[74 ] 根据离线DP优化结果调整不同工况类型下的MPC控制参数,再结合在线工况类型识别结果,离线选择1组MPC参数来处理相应驱动模式下的功率需求;实验表明,在不同驾驶场景(城区、高速、山区)下动态调整功率分配比例,可以提高对高速、城区等复杂行驶条件的适应性. Yang等[75 ] 根据不同的行驶工况,利用线性加权粒子优化算法对ECMS的等效因子进行离线优化,并将优化结果转换为二维数表,将其与在线策略结合,以实现能量管理;结果表明,在不同的电池SOC下,相比于基线算法,燃油经济性平均提高了16%. Fan等[76 ] 通过遗传算法求解不同工况类型下的等效因子,结合在线工况识别与离线优化结果,确定当前工况下的扭矩分配;与DP方法相比,在高功率需求场景下实现了14.82%的油耗降低. 以上EMS研究的核心思路是利用优化算法对控制参数进行离线优化,从而建立离线工况与控制参数匹配的数据库. 此类方法通过在线工况识别来动态切换控制参数,实现了具有工况特异性的能量管理优化,但是在保证系统鲁棒性与工程可行性的同时,仍然面临工况分类精度受限及跨场景适应性不足的挑战. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
Model predictive control for hybrid electric vehicle platooning using route information
2
2016
... 不少学者将道路环境引入基于优化的控制方法中. Yu等[77 ] 基于车队级道路坡度泛化模型,提出混合动力车队协同EMS,通过多参数耦合仿真,验证了所提MPC算法在计算效率上具有显著优势,单步计算耗时减少为11 ms,优于传统MPC方法(单步计算耗时>30 ms). 赵秀春等[78 ] 针对坡道跟驰场景,建立考虑坡度-载荷动态耦合的非线性车辆模型,采用滚动时域DP算法实现能量管理,使燃油经济性提高了12%. Fan等[79 ] 针对P2构型的柴油HEV在低温环境下的运行特性,在ECMS框架中考虑电池SOC反馈、工作温度反馈以及发动机进气预热状态,动态调整等效因子;其中考虑进气预热的策略展现出最佳的经济性,相比于没有考虑进气预热的ECMS策略,等效油耗可以降低5.4%~7.5%. Han等[80 ] 针对插电式混合动力汽车(plug-in hybrid electric vehicle, PHEV)在严寒地区的部署挑战,提出PMP全局优化方法,求解考虑了电池温度和预热需求的多目标能量管理问题;在−20℃环境下,所提策略相比于无预热方案,能够显著减少高达44.89%~48.30%的能源消耗. 上述由道路信息驱动的优化方法高度依赖于模型精度与计算效率之间的平衡:精细化建模虽然能够提升控制精度,但是模型复杂度导致求解时延较大,难以满足实时性需求;轻量化模型虽然保证了实时响应,但是因忽略坡度-车速-载荷耦合效应而导致能耗增加. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
混合动力电动汽车的跟车控制与能量管理
2
2022
... 不少学者将道路环境引入基于优化的控制方法中. Yu等[77 ] 基于车队级道路坡度泛化模型,提出混合动力车队协同EMS,通过多参数耦合仿真,验证了所提MPC算法在计算效率上具有显著优势,单步计算耗时减少为11 ms,优于传统MPC方法(单步计算耗时>30 ms). 赵秀春等[78 ] 针对坡道跟驰场景,建立考虑坡度-载荷动态耦合的非线性车辆模型,采用滚动时域DP算法实现能量管理,使燃油经济性提高了12%. Fan等[79 ] 针对P2构型的柴油HEV在低温环境下的运行特性,在ECMS框架中考虑电池SOC反馈、工作温度反馈以及发动机进气预热状态,动态调整等效因子;其中考虑进气预热的策略展现出最佳的经济性,相比于没有考虑进气预热的ECMS策略,等效油耗可以降低5.4%~7.5%. Han等[80 ] 针对插电式混合动力汽车(plug-in hybrid electric vehicle, PHEV)在严寒地区的部署挑战,提出PMP全局优化方法,求解考虑了电池温度和预热需求的多目标能量管理问题;在−20℃环境下,所提策略相比于无预热方案,能够显著减少高达44.89%~48.30%的能源消耗. 上述由道路信息驱动的优化方法高度依赖于模型精度与计算效率之间的平衡:精细化建模虽然能够提升控制精度,但是模型复杂度导致求解时延较大,难以满足实时性需求;轻量化模型虽然保证了实时响应,但是因忽略坡度-车速-载荷耦合效应而导致能耗增加. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
混合动力电动汽车的跟车控制与能量管理
2
2022
... 不少学者将道路环境引入基于优化的控制方法中. Yu等[77 ] 基于车队级道路坡度泛化模型,提出混合动力车队协同EMS,通过多参数耦合仿真,验证了所提MPC算法在计算效率上具有显著优势,单步计算耗时减少为11 ms,优于传统MPC方法(单步计算耗时>30 ms). 赵秀春等[78 ] 针对坡道跟驰场景,建立考虑坡度-载荷动态耦合的非线性车辆模型,采用滚动时域DP算法实现能量管理,使燃油经济性提高了12%. Fan等[79 ] 针对P2构型的柴油HEV在低温环境下的运行特性,在ECMS框架中考虑电池SOC反馈、工作温度反馈以及发动机进气预热状态,动态调整等效因子;其中考虑进气预热的策略展现出最佳的经济性,相比于没有考虑进气预热的ECMS策略,等效油耗可以降低5.4%~7.5%. Han等[80 ] 针对插电式混合动力汽车(plug-in hybrid electric vehicle, PHEV)在严寒地区的部署挑战,提出PMP全局优化方法,求解考虑了电池温度和预热需求的多目标能量管理问题;在−20℃环境下,所提策略相比于无预热方案,能够显著减少高达44.89%~48.30%的能源消耗. 上述由道路信息驱动的优化方法高度依赖于模型精度与计算效率之间的平衡:精细化建模虽然能够提升控制精度,但是模型复杂度导致求解时延较大,难以满足实时性需求;轻量化模型虽然保证了实时响应,但是因忽略坡度-车速-载荷耦合效应而导致能耗增加. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
Study on energy management strategy for a P2 diesel HEV considering low temperature environment
2
2025
... 不少学者将道路环境引入基于优化的控制方法中. Yu等[77 ] 基于车队级道路坡度泛化模型,提出混合动力车队协同EMS,通过多参数耦合仿真,验证了所提MPC算法在计算效率上具有显著优势,单步计算耗时减少为11 ms,优于传统MPC方法(单步计算耗时>30 ms). 赵秀春等[78 ] 针对坡道跟驰场景,建立考虑坡度-载荷动态耦合的非线性车辆模型,采用滚动时域DP算法实现能量管理,使燃油经济性提高了12%. Fan等[79 ] 针对P2构型的柴油HEV在低温环境下的运行特性,在ECMS框架中考虑电池SOC反馈、工作温度反馈以及发动机进气预热状态,动态调整等效因子;其中考虑进气预热的策略展现出最佳的经济性,相比于没有考虑进气预热的ECMS策略,等效油耗可以降低5.4%~7.5%. Han等[80 ] 针对插电式混合动力汽车(plug-in hybrid electric vehicle, PHEV)在严寒地区的部署挑战,提出PMP全局优化方法,求解考虑了电池温度和预热需求的多目标能量管理问题;在−20℃环境下,所提策略相比于无预热方案,能够显著减少高达44.89%~48.30%的能源消耗. 上述由道路信息驱动的优化方法高度依赖于模型精度与计算效率之间的平衡:精细化建模虽然能够提升控制精度,但是模型复杂度导致求解时延较大,难以满足实时性需求;轻量化模型虽然保证了实时响应,但是因忽略坡度-车速-载荷耦合效应而导致能耗增加. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
Energy management in plug-in hybrid electric vehicles: preheating the battery packs in low-temperature driving scenarios
2
2024
... 不少学者将道路环境引入基于优化的控制方法中. Yu等[77 ] 基于车队级道路坡度泛化模型,提出混合动力车队协同EMS,通过多参数耦合仿真,验证了所提MPC算法在计算效率上具有显著优势,单步计算耗时减少为11 ms,优于传统MPC方法(单步计算耗时>30 ms). 赵秀春等[78 ] 针对坡道跟驰场景,建立考虑坡度-载荷动态耦合的非线性车辆模型,采用滚动时域DP算法实现能量管理,使燃油经济性提高了12%. Fan等[79 ] 针对P2构型的柴油HEV在低温环境下的运行特性,在ECMS框架中考虑电池SOC反馈、工作温度反馈以及发动机进气预热状态,动态调整等效因子;其中考虑进气预热的策略展现出最佳的经济性,相比于没有考虑进气预热的ECMS策略,等效油耗可以降低5.4%~7.5%. Han等[80 ] 针对插电式混合动力汽车(plug-in hybrid electric vehicle, PHEV)在严寒地区的部署挑战,提出PMP全局优化方法,求解考虑了电池温度和预热需求的多目标能量管理问题;在−20℃环境下,所提策略相比于无预热方案,能够显著减少高达44.89%~48.30%的能源消耗. 上述由道路信息驱动的优化方法高度依赖于模型精度与计算效率之间的平衡:精细化建模虽然能够提升控制精度,但是模型复杂度导致求解时延较大,难以满足实时性需求;轻量化模型虽然保证了实时响应,但是因忽略坡度-车速-载荷耦合效应而导致能耗增加. ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
2
... 多源行车信息与基于优化的EMS的耦合对HEV系统状态预测具有显著的提升作用,而精准的预测可以提升EMS的性能表现. 闫德超[81 ] 采用多源信息融合的车速预测方法,考虑驾驶意图、历史车速和车间运动特征等信息,显著提高了预测精度,并通过DP算法在预测时域内进行滚动优化,实现了近似全局最优的能量分配. 对于MPC,预测模块如何利用多源信息来预测系统状态,以及在此基础上如何提高预测精度,是后续研究的重点与难点. 詹森[82 ] 针对不同类型的行驶工况,确定与之相应的驾驶风格识别系数,并依据不同驾驶风格的车速信息应用基于遗传优化的ECMS,得到不同驾驶风格下的需求功率分配方式;仿真结果表明,该EMS相比于ECMS能够使整车燃油消耗降低8.49%,且提高了控制适应性. 若需要进一步提高算法的泛化能力,则需要融合更多行车信息,实现等效因子的自适应优化,而这也是能否实现考虑多源信息融合的ECMS的关键. 利用行车信息优化基于优化的EMS的方法优点以及局限性见表2 . ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
2
... 多源行车信息与基于优化的EMS的耦合对HEV系统状态预测具有显著的提升作用,而精准的预测可以提升EMS的性能表现. 闫德超[81 ] 采用多源信息融合的车速预测方法,考虑驾驶意图、历史车速和车间运动特征等信息,显著提高了预测精度,并通过DP算法在预测时域内进行滚动优化,实现了近似全局最优的能量分配. 对于MPC,预测模块如何利用多源信息来预测系统状态,以及在此基础上如何提高预测精度,是后续研究的重点与难点. 詹森[82 ] 针对不同类型的行驶工况,确定与之相应的驾驶风格识别系数,并依据不同驾驶风格的车速信息应用基于遗传优化的ECMS,得到不同驾驶风格下的需求功率分配方式;仿真结果表明,该EMS相比于ECMS能够使整车燃油消耗降低8.49%,且提高了控制适应性. 若需要进一步提高算法的泛化能力,则需要融合更多行车信息,实现等效因子的自适应优化,而这也是能否实现考虑多源信息融合的ECMS的关键. 利用行车信息优化基于优化的EMS的方法优点以及局限性见表2 . ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
2
... 多源行车信息与基于优化的EMS的耦合对HEV系统状态预测具有显著的提升作用,而精准的预测可以提升EMS的性能表现. 闫德超[81 ] 采用多源信息融合的车速预测方法,考虑驾驶意图、历史车速和车间运动特征等信息,显著提高了预测精度,并通过DP算法在预测时域内进行滚动优化,实现了近似全局最优的能量分配. 对于MPC,预测模块如何利用多源信息来预测系统状态,以及在此基础上如何提高预测精度,是后续研究的重点与难点. 詹森[82 ] 针对不同类型的行驶工况,确定与之相应的驾驶风格识别系数,并依据不同驾驶风格的车速信息应用基于遗传优化的ECMS,得到不同驾驶风格下的需求功率分配方式;仿真结果表明,该EMS相比于ECMS能够使整车燃油消耗降低8.49%,且提高了控制适应性. 若需要进一步提高算法的泛化能力,则需要融合更多行车信息,实现等效因子的自适应优化,而这也是能否实现考虑多源信息融合的ECMS的关键. 利用行车信息优化基于优化的EMS的方法优点以及局限性见表2 . ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
2
... 多源行车信息与基于优化的EMS的耦合对HEV系统状态预测具有显著的提升作用,而精准的预测可以提升EMS的性能表现. 闫德超[81 ] 采用多源信息融合的车速预测方法,考虑驾驶意图、历史车速和车间运动特征等信息,显著提高了预测精度,并通过DP算法在预测时域内进行滚动优化,实现了近似全局最优的能量分配. 对于MPC,预测模块如何利用多源信息来预测系统状态,以及在此基础上如何提高预测精度,是后续研究的重点与难点. 詹森[82 ] 针对不同类型的行驶工况,确定与之相应的驾驶风格识别系数,并依据不同驾驶风格的车速信息应用基于遗传优化的ECMS,得到不同驾驶风格下的需求功率分配方式;仿真结果表明,该EMS相比于ECMS能够使整车燃油消耗降低8.49%,且提高了控制适应性. 若需要进一步提高算法的泛化能力,则需要融合更多行车信息,实现等效因子的自适应优化,而这也是能否实现考虑多源信息融合的ECMS的关键. 利用行车信息优化基于优化的EMS的方法优点以及局限性见表2 . ...
... Characteristics of methods for optimizing optimization-based EMS using driving information
Tab.2 行车信息 方法 作用效果 优点 局限性 驾驶风格 ECMS[72 ] 量化驾驶风格与 提高EMS的适应性、降低能耗 在实际应用中存在 粒子群优化-遗传算法+ECMS[73 ] 优化线性关系 提高EMS的适应性 行驶工况 DP+MPC[74 ] 控制参数寻优 具有全局最优性和实时性 泛化能力弱, 粒子群优化+ECMS[75 ] [76 ] 离线优化等效因子,在线寻优 离线优化具备全局最优性, 道路环境 道路坡度+ MPC[77 ] 、DP[78 ] [79 ] 、PMP[80 ] 提高不同道路状况下数学 燃油经济性好,提高不同 模型复杂性与准确 驾驶意图+车间运动特征 DP[81 ] 将多源信息嵌入预测模块 提高状态预测精度, 计算复杂度高, 驾驶风格+行驶工况 遗传优化+ECMS[82 ] 量化不同行驶工况下的驾驶风格 提高适应性 实际不确定性高,
3. 基于深度强化学习的能量管理策略 传统的EMS大多基于专家经验构建静态规则库或依赖简化的物理模型,利用离散化的状态空间与线性假设来近似地描述能量管理问题. 此类方法在应对实际系统的动态非线性耦合特性时,常因模型失配与规则僵化,导致控制性能下降和能量效率损失. 同时,提升优化精度而增加离散维度会导致计算复杂度呈指数级增长,严重影响车载嵌入式平台的实时性. 相较之下,DRL通过构建端到端策略,展现出强大的自学习与环境适应能力. 其能够处理复杂的高维状态与动作空间,理论上可以在高维连续控制空间中自主挖掘潜在优化规律,从而突破了传统方法对显式数学建模的依赖,可以应对动态多变的实际驾驶工况,具有传统方法难以触及的应用前景. ...
Human-level control through deep reinforcement learning
1
2015
... DRL在早期发展阶段已展现出处理高维复杂决策任务的独特优势. Mnih等[83 ] 提出的深度Q网络在Atari视频游戏中超越人类专业玩家,首次验证了DRL在高维状态空间中自主决策的可行性. Silver等[84 ] 进一步融合蒙特卡罗搜索、价值网络与策略网络,成功构建AlphaGo模型,标志着DRL在序贯决策问题中的突破. 近年来,DRL方法在EMS领域的应用不断深入,并取得了显著成果. Wu等[85 ] 提出基于深度Q网络的EMS,通过融合车辆功率需求与动力系统状态观测结果,动态决策发动机功率增量,有效提高了策略的收敛速度. Li等[86 ] 采用演员-评论家(Actor-Critic)框架构建连续动作空间映射,实现了与DP方法相近的能源消耗,并大幅缩短了计算时间. 上述研究不仅证明了DRL在高维连续控制任务中的优势,而且为深度耦合行车信息以优化EMS提供了可扩展的理论框架. ...
Mastering the game of Go with deep neural networks and tree search
1
2016
... DRL在早期发展阶段已展现出处理高维复杂决策任务的独特优势. Mnih等[83 ] 提出的深度Q网络在Atari视频游戏中超越人类专业玩家,首次验证了DRL在高维状态空间中自主决策的可行性. Silver等[84 ] 进一步融合蒙特卡罗搜索、价值网络与策略网络,成功构建AlphaGo模型,标志着DRL在序贯决策问题中的突破. 近年来,DRL方法在EMS领域的应用不断深入,并取得了显著成果. Wu等[85 ] 提出基于深度Q网络的EMS,通过融合车辆功率需求与动力系统状态观测结果,动态决策发动机功率增量,有效提高了策略的收敛速度. Li等[86 ] 采用演员-评论家(Actor-Critic)框架构建连续动作空间映射,实现了与DP方法相近的能源消耗,并大幅缩短了计算时间. 上述研究不仅证明了DRL在高维连续控制任务中的优势,而且为深度耦合行车信息以优化EMS提供了可扩展的理论框架. ...
Continuous reinforcement learning of energy management with deep Q network for a power split hybrid electric bus
1
2018
... DRL在早期发展阶段已展现出处理高维复杂决策任务的独特优势. Mnih等[83 ] 提出的深度Q网络在Atari视频游戏中超越人类专业玩家,首次验证了DRL在高维状态空间中自主决策的可行性. Silver等[84 ] 进一步融合蒙特卡罗搜索、价值网络与策略网络,成功构建AlphaGo模型,标志着DRL在序贯决策问题中的突破. 近年来,DRL方法在EMS领域的应用不断深入,并取得了显著成果. Wu等[85 ] 提出基于深度Q网络的EMS,通过融合车辆功率需求与动力系统状态观测结果,动态决策发动机功率增量,有效提高了策略的收敛速度. Li等[86 ] 采用演员-评论家(Actor-Critic)框架构建连续动作空间映射,实现了与DP方法相近的能源消耗,并大幅缩短了计算时间. 上述研究不仅证明了DRL在高维连续控制任务中的优势,而且为深度耦合行车信息以优化EMS提供了可扩展的理论框架. ...
Power management for a plug-in hybrid electric vehicle based on reinforcement learning with continuous state and action spaces
1
2017
... DRL在早期发展阶段已展现出处理高维复杂决策任务的独特优势. Mnih等[83 ] 提出的深度Q网络在Atari视频游戏中超越人类专业玩家,首次验证了DRL在高维状态空间中自主决策的可行性. Silver等[84 ] 进一步融合蒙特卡罗搜索、价值网络与策略网络,成功构建AlphaGo模型,标志着DRL在序贯决策问题中的突破. 近年来,DRL方法在EMS领域的应用不断深入,并取得了显著成果. Wu等[85 ] 提出基于深度Q网络的EMS,通过融合车辆功率需求与动力系统状态观测结果,动态决策发动机功率增量,有效提高了策略的收敛速度. Li等[86 ] 采用演员-评论家(Actor-Critic)框架构建连续动作空间映射,实现了与DP方法相近的能源消耗,并大幅缩短了计算时间. 上述研究不仅证明了DRL在高维连续控制任务中的优势,而且为深度耦合行车信息以优化EMS提供了可扩展的理论框架. ...
Advances and challenges in learning from experience replay
1
2024
... 行车信息具有显著的时序关联特征:连续时间步内的行驶速度、加速度与电池SOC之间呈现强自相关性. 例如,拥堵路况下低速跟车导致SOC持续下降;而道路坡度、车流密度等外部环境参数的时空耦合特性,使得状态转移难以满足严格的马尔可夫假设. 早期基于价值的DRL算法中多项关键设计对于缓解高维、连续和时序相关数据带来的训练挑战起到了重要作用. 经验回放机制[87 ] 通过构建经验池,存储智能体与环境交互时产生的状态-动作-奖励样本,并采用优先级抽样策略解耦时空关联样本,从而提高了模型对动态行车信息的学习效率. 行车信息的动态非平稳性,如SOC因频繁充放电而剧烈波动、交通信号灯切换引发车速突变等,会导致即时奖励与下一状态的联合分布偏离稳态假设. 目标网络[88 ] 以软更新的方式渐进地继承主网络的权重参数,借助参数更新的滞后机制,将目标Q值的计算锚定在历史策略的统计特征上,有效平滑了短时工况扰动(如急加速导致的功率需求尖峰)对价值估计的冲击,从而降低了自举误差并提升了决策稳定性. 行车信息的强时变特性,如车速因紧急制动而骤降、环境感知数据因隧道遮挡而突发丢失等,可能导致损失函数的局部曲率陡增,进而使参数更新量级超出稳定收敛域. 梯度裁剪[89 ] 通过约束反向传播过程中梯度向量的范数上界,将参数更新量级限制在稳定收敛域内,从而防止梯度爆炸问题. ...
T-soft update of target network for deep reinforcement learning
1
2021
... 行车信息具有显著的时序关联特征:连续时间步内的行驶速度、加速度与电池SOC之间呈现强自相关性. 例如,拥堵路况下低速跟车导致SOC持续下降;而道路坡度、车流密度等外部环境参数的时空耦合特性,使得状态转移难以满足严格的马尔可夫假设. 早期基于价值的DRL算法中多项关键设计对于缓解高维、连续和时序相关数据带来的训练挑战起到了重要作用. 经验回放机制[87 ] 通过构建经验池,存储智能体与环境交互时产生的状态-动作-奖励样本,并采用优先级抽样策略解耦时空关联样本,从而提高了模型对动态行车信息的学习效率. 行车信息的动态非平稳性,如SOC因频繁充放电而剧烈波动、交通信号灯切换引发车速突变等,会导致即时奖励与下一状态的联合分布偏离稳态假设. 目标网络[88 ] 以软更新的方式渐进地继承主网络的权重参数,借助参数更新的滞后机制,将目标Q值的计算锚定在历史策略的统计特征上,有效平滑了短时工况扰动(如急加速导致的功率需求尖峰)对价值估计的冲击,从而降低了自举误差并提升了决策稳定性. 行车信息的强时变特性,如车速因紧急制动而骤降、环境感知数据因隧道遮挡而突发丢失等,可能导致损失函数的局部曲率陡增,进而使参数更新量级超出稳定收敛域. 梯度裁剪[89 ] 通过约束反向传播过程中梯度向量的范数上界,将参数更新量级限制在稳定收敛域内,从而防止梯度爆炸问题. ...
Gradient monitored reinforcement learning
1
2023
... 行车信息具有显著的时序关联特征:连续时间步内的行驶速度、加速度与电池SOC之间呈现强自相关性. 例如,拥堵路况下低速跟车导致SOC持续下降;而道路坡度、车流密度等外部环境参数的时空耦合特性,使得状态转移难以满足严格的马尔可夫假设. 早期基于价值的DRL算法中多项关键设计对于缓解高维、连续和时序相关数据带来的训练挑战起到了重要作用. 经验回放机制[87 ] 通过构建经验池,存储智能体与环境交互时产生的状态-动作-奖励样本,并采用优先级抽样策略解耦时空关联样本,从而提高了模型对动态行车信息的学习效率. 行车信息的动态非平稳性,如SOC因频繁充放电而剧烈波动、交通信号灯切换引发车速突变等,会导致即时奖励与下一状态的联合分布偏离稳态假设. 目标网络[88 ] 以软更新的方式渐进地继承主网络的权重参数,借助参数更新的滞后机制,将目标Q值的计算锚定在历史策略的统计特征上,有效平滑了短时工况扰动(如急加速导致的功率需求尖峰)对价值估计的冲击,从而降低了自举误差并提升了决策稳定性. 行车信息的强时变特性,如车速因紧急制动而骤降、环境感知数据因隧道遮挡而突发丢失等,可能导致损失函数的局部曲率陡增,进而使参数更新量级超出稳定收敛域. 梯度裁剪[89 ] 通过约束反向传播过程中梯度向量的范数上界,将参数更新量级限制在稳定收敛域内,从而防止梯度爆炸问题. ...
1
... 基于策略的DRL方法通过直接建模状态-动作映射策略,在连续控制任务中展现出相较于基于价值的方法更优的维度扩展性与动作连续性. 此类方法根据策略类型被分为确定性策略梯度方法[90 ] 和随机性策略优化方法[91 ] . 确定性策略梯度方法以深度确定性策略梯度(deep deterministic policy gradient, DDPG)及双延迟深度确定性策略梯度(twin delayed deep deterministic policy gradient, TD3)方法为代表,采用Actor-Critic架构,其中Actor网络输出确定性动作,Critic网络评估状态-动作的价值. 该类方法通过直接学习从高维连续状态到连续动作的映射,表现出较高的样本利用率和训练效率. 随机性策略优化方法以置信域策略优化(trust region policy optimization, TRPO)、近端策略优化(proximal policy optimization, PPO)及软演员-评论家(soft actor-critic, SAC)方法为代表,通过输出动作概率分布,显式平衡“探索-利用”问题,其核心设计有KL散度约束、剪切目标函数以及熵正则化操作. KL散度约束限制策略更新幅度,以此抑制因行车信息噪声引发的策略突变;剪切目标函数通过截断重要性采样比,在保证样本效率的同时规避大规模参数偏移;熵正则化操作通过在奖励函数中引入策略熵项,鼓励模型探索,有助于其在复杂环境中找到更优策略,间接提升了模型对环境不确定性的适应能力. 基于策略的DRL方法还通常利用经验回放池解耦数据时序相关性,利用目标网络抑制价值估计波动,并辅以动作空间噪声注入(如采用Ornstein-Uhlenbeck过程)以增强探索效率,从而在复杂行车场景中实现高样本利用率与实时、高精度控制. 综上所述,这些算法设计为多源行车信息的集成、EMS的优化提供了坚实的技术支撑. ...
1
... 基于策略的DRL方法通过直接建模状态-动作映射策略,在连续控制任务中展现出相较于基于价值的方法更优的维度扩展性与动作连续性. 此类方法根据策略类型被分为确定性策略梯度方法[90 ] 和随机性策略优化方法[91 ] . 确定性策略梯度方法以深度确定性策略梯度(deep deterministic policy gradient, DDPG)及双延迟深度确定性策略梯度(twin delayed deep deterministic policy gradient, TD3)方法为代表,采用Actor-Critic架构,其中Actor网络输出确定性动作,Critic网络评估状态-动作的价值. 该类方法通过直接学习从高维连续状态到连续动作的映射,表现出较高的样本利用率和训练效率. 随机性策略优化方法以置信域策略优化(trust region policy optimization, TRPO)、近端策略优化(proximal policy optimization, PPO)及软演员-评论家(soft actor-critic, SAC)方法为代表,通过输出动作概率分布,显式平衡“探索-利用”问题,其核心设计有KL散度约束、剪切目标函数以及熵正则化操作. KL散度约束限制策略更新幅度,以此抑制因行车信息噪声引发的策略突变;剪切目标函数通过截断重要性采样比,在保证样本效率的同时规避大规模参数偏移;熵正则化操作通过在奖励函数中引入策略熵项,鼓励模型探索,有助于其在复杂环境中找到更优策略,间接提升了模型对环境不确定性的适应能力. 基于策略的DRL方法还通常利用经验回放池解耦数据时序相关性,利用目标网络抑制价值估计波动,并辅以动作空间噪声注入(如采用Ornstein-Uhlenbeck过程)以增强探索效率,从而在复杂行车场景中实现高样本利用率与实时、高精度控制. 综上所述,这些算法设计为多源行车信息的集成、EMS的优化提供了坚实的技术支撑. ...
Deep reinforcement learning based energy management strategy for range extend fuel cell hybrid electric vehicle
1
2023
... 与传统EMS相比,DRL在HEV的燃油经济性、计算效率及对复杂工况的适应性方面展现出显著优势. Huang等[92 ] 针对增程燃料电池HEV,首次提出双深度确定性策略梯度算法框架,通过对纯电动与增程模式的优化,实现了相较于规则策略约30%的经济性提升;在增程模式下,氢气消耗量在不同工况下分别降低了30.2%、25.8%和27.6%,同时显著提高了电池最终的SOC值并降低了燃料电池的功率波动. Wang等[93 ] 广泛比较13种流行DRL算法后发现,在连续动作空间中,SAC算法不仅奖励最高,而且其油耗相较于ECMS降低了3.24%(SAC算法油耗:478.5 g,ECMS算法油耗:494.5 g);在离散动作空间中,全参数化分位函数(fully parameterized quantile function, FQF)算法的奖励最高,其油耗比ECMS低5.34%(累计消耗燃料468.1 g),展现出DRL在精细化能量分配上超越ECMS的潜力. 该研究还指出,与基于规则的策略(累计消耗燃料521.6 g)相比,FQF和SAC的油耗分别降低了10.26%和8.26%. Li等[94 ] 为串联式HEV开发基于DRL并集成历史累积行程信息的EMS,在无需未来行程先验知识的条件下,其原始DRL策略与DP基准策略的平均燃油经济性差距仅为3.5%;与预测误差为1 m/s的MPC策略相比,调整输出频率后的DRL策略性能与之相当,但是DRL的计算速度极快,平均每个仿真步骤耗时小于0.001 s,远胜于MPC,且在测试行程中发动机启动次数比DP基准策略减少了约34%,显示了其鲁棒性和实际应用潜力. Zhang等[95 ] 针对插电式混合动力汽车在寒冷气候下的节能潜力,提出集成热管理的EMS. 该策略将环境、发动机冷却液温度、交通及地形信息整合至状态空间,利用发动机智能预热和辅助加热功能,在−15~15 ℃环境下,使燃油经济性接近于DP策略的93.7%,并实现了2.2%~9.6%的油耗降低. Tang等[96 ] 探索分布式DRL算法的应用,提出基于异步优势演员-评论家和基于分布式近端策略优化的EMS,2种策略的燃油经济性与DP基准策略的差距分别仅为5.88%和6.44%. 该分布式算法不仅实现了接近于DP的燃油经济性,并且相较于传统的基于深度Q网络的DRL方法(其与DP的油耗差距为8.87%),学习效率提升了4倍,这表明分布式DRL架构能够在保证性能接近最优的同时,显著提高训练效率. 综上所述,这些研究从燃油经济性、运行成本、计算效率以及对特定车型的适应性等多个维度,对基于DRL的EMS与不同类型的传统EMS进行对比,有力地证明了DRL方法在HEV能量管理领域的先进性和应用价值. ...
A comparative study of 13 deep reinforcement learning based energy management methods for a hybrid electric vehicle
1
2023
... 与传统EMS相比,DRL在HEV的燃油经济性、计算效率及对复杂工况的适应性方面展现出显著优势. Huang等[92 ] 针对增程燃料电池HEV,首次提出双深度确定性策略梯度算法框架,通过对纯电动与增程模式的优化,实现了相较于规则策略约30%的经济性提升;在增程模式下,氢气消耗量在不同工况下分别降低了30.2%、25.8%和27.6%,同时显著提高了电池最终的SOC值并降低了燃料电池的功率波动. Wang等[93 ] 广泛比较13种流行DRL算法后发现,在连续动作空间中,SAC算法不仅奖励最高,而且其油耗相较于ECMS降低了3.24%(SAC算法油耗:478.5 g,ECMS算法油耗:494.5 g);在离散动作空间中,全参数化分位函数(fully parameterized quantile function, FQF)算法的奖励最高,其油耗比ECMS低5.34%(累计消耗燃料468.1 g),展现出DRL在精细化能量分配上超越ECMS的潜力. 该研究还指出,与基于规则的策略(累计消耗燃料521.6 g)相比,FQF和SAC的油耗分别降低了10.26%和8.26%. Li等[94 ] 为串联式HEV开发基于DRL并集成历史累积行程信息的EMS,在无需未来行程先验知识的条件下,其原始DRL策略与DP基准策略的平均燃油经济性差距仅为3.5%;与预测误差为1 m/s的MPC策略相比,调整输出频率后的DRL策略性能与之相当,但是DRL的计算速度极快,平均每个仿真步骤耗时小于0.001 s,远胜于MPC,且在测试行程中发动机启动次数比DP基准策略减少了约34%,显示了其鲁棒性和实际应用潜力. Zhang等[95 ] 针对插电式混合动力汽车在寒冷气候下的节能潜力,提出集成热管理的EMS. 该策略将环境、发动机冷却液温度、交通及地形信息整合至状态空间,利用发动机智能预热和辅助加热功能,在−15~15 ℃环境下,使燃油经济性接近于DP策略的93.7%,并实现了2.2%~9.6%的油耗降低. Tang等[96 ] 探索分布式DRL算法的应用,提出基于异步优势演员-评论家和基于分布式近端策略优化的EMS,2种策略的燃油经济性与DP基准策略的差距分别仅为5.88%和6.44%. 该分布式算法不仅实现了接近于DP的燃油经济性,并且相较于传统的基于深度Q网络的DRL方法(其与DP的油耗差距为8.87%),学习效率提升了4倍,这表明分布式DRL架构能够在保证性能接近最优的同时,显著提高训练效率. 综上所述,这些研究从燃油经济性、运行成本、计算效率以及对特定车型的适应性等多个维度,对基于DRL的EMS与不同类型的传统EMS进行对比,有力地证明了DRL方法在HEV能量管理领域的先进性和应用价值. ...
Deep reinforcement learning-based energy management for a series hybrid electric vehicle enabled by history cumulative trip information
1
2019
... 与传统EMS相比,DRL在HEV的燃油经济性、计算效率及对复杂工况的适应性方面展现出显著优势. Huang等[92 ] 针对增程燃料电池HEV,首次提出双深度确定性策略梯度算法框架,通过对纯电动与增程模式的优化,实现了相较于规则策略约30%的经济性提升;在增程模式下,氢气消耗量在不同工况下分别降低了30.2%、25.8%和27.6%,同时显著提高了电池最终的SOC值并降低了燃料电池的功率波动. Wang等[93 ] 广泛比较13种流行DRL算法后发现,在连续动作空间中,SAC算法不仅奖励最高,而且其油耗相较于ECMS降低了3.24%(SAC算法油耗:478.5 g,ECMS算法油耗:494.5 g);在离散动作空间中,全参数化分位函数(fully parameterized quantile function, FQF)算法的奖励最高,其油耗比ECMS低5.34%(累计消耗燃料468.1 g),展现出DRL在精细化能量分配上超越ECMS的潜力. 该研究还指出,与基于规则的策略(累计消耗燃料521.6 g)相比,FQF和SAC的油耗分别降低了10.26%和8.26%. Li等[94 ] 为串联式HEV开发基于DRL并集成历史累积行程信息的EMS,在无需未来行程先验知识的条件下,其原始DRL策略与DP基准策略的平均燃油经济性差距仅为3.5%;与预测误差为1 m/s的MPC策略相比,调整输出频率后的DRL策略性能与之相当,但是DRL的计算速度极快,平均每个仿真步骤耗时小于0.001 s,远胜于MPC,且在测试行程中发动机启动次数比DP基准策略减少了约34%,显示了其鲁棒性和实际应用潜力. Zhang等[95 ] 针对插电式混合动力汽车在寒冷气候下的节能潜力,提出集成热管理的EMS. 该策略将环境、发动机冷却液温度、交通及地形信息整合至状态空间,利用发动机智能预热和辅助加热功能,在−15~15 ℃环境下,使燃油经济性接近于DP策略的93.7%,并实现了2.2%~9.6%的油耗降低. Tang等[96 ] 探索分布式DRL算法的应用,提出基于异步优势演员-评论家和基于分布式近端策略优化的EMS,2种策略的燃油经济性与DP基准策略的差距分别仅为5.88%和6.44%. 该分布式算法不仅实现了接近于DP的燃油经济性,并且相较于传统的基于深度Q网络的DRL方法(其与DP的油耗差距为8.87%),学习效率提升了4倍,这表明分布式DRL架构能够在保证性能接近最优的同时,显著提高训练效率. 综上所述,这些研究从燃油经济性、运行成本、计算效率以及对特定车型的适应性等多个维度,对基于DRL的EMS与不同类型的传统EMS进行对比,有力地证明了DRL方法在HEV能量管理领域的先进性和应用价值. ...
Integrated thermal and energy management of connected hybrid electric vehicles using deep reinforcement learning
1
2024
... 与传统EMS相比,DRL在HEV的燃油经济性、计算效率及对复杂工况的适应性方面展现出显著优势. Huang等[92 ] 针对增程燃料电池HEV,首次提出双深度确定性策略梯度算法框架,通过对纯电动与增程模式的优化,实现了相较于规则策略约30%的经济性提升;在增程模式下,氢气消耗量在不同工况下分别降低了30.2%、25.8%和27.6%,同时显著提高了电池最终的SOC值并降低了燃料电池的功率波动. Wang等[93 ] 广泛比较13种流行DRL算法后发现,在连续动作空间中,SAC算法不仅奖励最高,而且其油耗相较于ECMS降低了3.24%(SAC算法油耗:478.5 g,ECMS算法油耗:494.5 g);在离散动作空间中,全参数化分位函数(fully parameterized quantile function, FQF)算法的奖励最高,其油耗比ECMS低5.34%(累计消耗燃料468.1 g),展现出DRL在精细化能量分配上超越ECMS的潜力. 该研究还指出,与基于规则的策略(累计消耗燃料521.6 g)相比,FQF和SAC的油耗分别降低了10.26%和8.26%. Li等[94 ] 为串联式HEV开发基于DRL并集成历史累积行程信息的EMS,在无需未来行程先验知识的条件下,其原始DRL策略与DP基准策略的平均燃油经济性差距仅为3.5%;与预测误差为1 m/s的MPC策略相比,调整输出频率后的DRL策略性能与之相当,但是DRL的计算速度极快,平均每个仿真步骤耗时小于0.001 s,远胜于MPC,且在测试行程中发动机启动次数比DP基准策略减少了约34%,显示了其鲁棒性和实际应用潜力. Zhang等[95 ] 针对插电式混合动力汽车在寒冷气候下的节能潜力,提出集成热管理的EMS. 该策略将环境、发动机冷却液温度、交通及地形信息整合至状态空间,利用发动机智能预热和辅助加热功能,在−15~15 ℃环境下,使燃油经济性接近于DP策略的93.7%,并实现了2.2%~9.6%的油耗降低. Tang等[96 ] 探索分布式DRL算法的应用,提出基于异步优势演员-评论家和基于分布式近端策略优化的EMS,2种策略的燃油经济性与DP基准策略的差距分别仅为5.88%和6.44%. 该分布式算法不仅实现了接近于DP的燃油经济性,并且相较于传统的基于深度Q网络的DRL方法(其与DP的油耗差距为8.87%),学习效率提升了4倍,这表明分布式DRL架构能够在保证性能接近最优的同时,显著提高训练效率. 综上所述,这些研究从燃油经济性、运行成本、计算效率以及对特定车型的适应性等多个维度,对基于DRL的EMS与不同类型的传统EMS进行对比,有力地证明了DRL方法在HEV能量管理领域的先进性和应用价值. ...
Distributed deep reinforcement learning-based energy and emission management strategy for hybrid electric vehicles
1
2021
... 与传统EMS相比,DRL在HEV的燃油经济性、计算效率及对复杂工况的适应性方面展现出显著优势. Huang等[92 ] 针对增程燃料电池HEV,首次提出双深度确定性策略梯度算法框架,通过对纯电动与增程模式的优化,实现了相较于规则策略约30%的经济性提升;在增程模式下,氢气消耗量在不同工况下分别降低了30.2%、25.8%和27.6%,同时显著提高了电池最终的SOC值并降低了燃料电池的功率波动. Wang等[93 ] 广泛比较13种流行DRL算法后发现,在连续动作空间中,SAC算法不仅奖励最高,而且其油耗相较于ECMS降低了3.24%(SAC算法油耗:478.5 g,ECMS算法油耗:494.5 g);在离散动作空间中,全参数化分位函数(fully parameterized quantile function, FQF)算法的奖励最高,其油耗比ECMS低5.34%(累计消耗燃料468.1 g),展现出DRL在精细化能量分配上超越ECMS的潜力. 该研究还指出,与基于规则的策略(累计消耗燃料521.6 g)相比,FQF和SAC的油耗分别降低了10.26%和8.26%. Li等[94 ] 为串联式HEV开发基于DRL并集成历史累积行程信息的EMS,在无需未来行程先验知识的条件下,其原始DRL策略与DP基准策略的平均燃油经济性差距仅为3.5%;与预测误差为1 m/s的MPC策略相比,调整输出频率后的DRL策略性能与之相当,但是DRL的计算速度极快,平均每个仿真步骤耗时小于0.001 s,远胜于MPC,且在测试行程中发动机启动次数比DP基准策略减少了约34%,显示了其鲁棒性和实际应用潜力. Zhang等[95 ] 针对插电式混合动力汽车在寒冷气候下的节能潜力,提出集成热管理的EMS. 该策略将环境、发动机冷却液温度、交通及地形信息整合至状态空间,利用发动机智能预热和辅助加热功能,在−15~15 ℃环境下,使燃油经济性接近于DP策略的93.7%,并实现了2.2%~9.6%的油耗降低. Tang等[96 ] 探索分布式DRL算法的应用,提出基于异步优势演员-评论家和基于分布式近端策略优化的EMS,2种策略的燃油经济性与DP基准策略的差距分别仅为5.88%和6.44%. 该分布式算法不仅实现了接近于DP的燃油经济性,并且相较于传统的基于深度Q网络的DRL方法(其与DP的油耗差距为8.87%),学习效率提升了4倍,这表明分布式DRL架构能够在保证性能接近最优的同时,显著提高训练效率. 综上所述,这些研究从燃油经济性、运行成本、计算效率以及对特定车型的适应性等多个维度,对基于DRL的EMS与不同类型的传统EMS进行对比,有力地证明了DRL方法在HEV能量管理领域的先进性和应用价值. ...
1
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
1
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
Deep reinforcement learning based PHEV energy management with co-recognition for traffic condition and driving style
2
2023
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
... Comparison of driving information fusion methods based on feature fusion
Tab.3 方法 核心机制 验证场景 模糊聚类+混合状态空间设计[98 ] 驾驶风格耦合需求转矩 CCDC、RDC1、RDC2驾驶循环 离散风格标签+动态阈值调整[99 ] 驾驶风格驱动的扭矩阈值自适应 城市拥堵、高速巡航场景 在线采样+半监督支持向量机识别[100 ] 将驾驶风格作为额外状态输入 多模式驾驶场景 模糊聚类+学习向量量化网络识别[102 ] 工况分类重组与专家规则融合 城市/高速/郊区合成驾驶循环 自然驾驶数据采集+特征提取[103 ] 由固定路线数据驱动的训练集构建 郑州公交路线 交通流量数据驱动+知识嵌入[104 ] 驾驶场景建模与专业知识融合 实际交通流量场景
基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
2
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
... Comparison of driving information fusion methods based on feature fusion
Tab.3 方法 核心机制 验证场景 模糊聚类+混合状态空间设计[98 ] 驾驶风格耦合需求转矩 CCDC、RDC1、RDC2驾驶循环 离散风格标签+动态阈值调整[99 ] 驾驶风格驱动的扭矩阈值自适应 城市拥堵、高速巡航场景 在线采样+半监督支持向量机识别[100 ] 将驾驶风格作为额外状态输入 多模式驾驶场景 模糊聚类+学习向量量化网络识别[102 ] 工况分类重组与专家规则融合 城市/高速/郊区合成驾驶循环 自然驾驶数据采集+特征提取[103 ] 由固定路线数据驱动的训练集构建 郑州公交路线 交通流量数据驱动+知识嵌入[104 ] 驾驶场景建模与专业知识融合 实际交通流量场景
基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
Driving style-aware energy management for battery/supercapacitor electric vehicles using deep reinforcement learning
2
2023
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
... Comparison of driving information fusion methods based on feature fusion
Tab.3 方法 核心机制 验证场景 模糊聚类+混合状态空间设计[98 ] 驾驶风格耦合需求转矩 CCDC、RDC1、RDC2驾驶循环 离散风格标签+动态阈值调整[99 ] 驾驶风格驱动的扭矩阈值自适应 城市拥堵、高速巡航场景 在线采样+半监督支持向量机识别[100 ] 将驾驶风格作为额外状态输入 多模式驾驶场景 模糊聚类+学习向量量化网络识别[102 ] 工况分类重组与专家规则融合 城市/高速/郊区合成驾驶循环 自然驾驶数据采集+特征提取[103 ] 由固定路线数据驱动的训练集构建 郑州公交路线 交通流量数据驱动+知识嵌入[104 ] 驾驶场景建模与专业知识融合 实际交通流量场景
基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
1
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
1
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
A novel energy management strategy integrating deep reinforcement learning and rule based on condition identification
2
2023
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
... Comparison of driving information fusion methods based on feature fusion
Tab.3 方法 核心机制 验证场景 模糊聚类+混合状态空间设计[98 ] 驾驶风格耦合需求转矩 CCDC、RDC1、RDC2驾驶循环 离散风格标签+动态阈值调整[99 ] 驾驶风格驱动的扭矩阈值自适应 城市拥堵、高速巡航场景 在线采样+半监督支持向量机识别[100 ] 将驾驶风格作为额外状态输入 多模式驾驶场景 模糊聚类+学习向量量化网络识别[102 ] 工况分类重组与专家规则融合 城市/高速/郊区合成驾驶循环 自然驾驶数据采集+特征提取[103 ] 由固定路线数据驱动的训练集构建 郑州公交路线 交通流量数据驱动+知识嵌入[104 ] 驾驶场景建模与专业知识融合 实际交通流量场景
基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
A novel data-driven energy management strategy for fuel cell hybrid electric bus based on improved twin delayed deep deterministic policy gradient algorithm
2
2024
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
... Comparison of driving information fusion methods based on feature fusion
Tab.3 方法 核心机制 验证场景 模糊聚类+混合状态空间设计[98 ] 驾驶风格耦合需求转矩 CCDC、RDC1、RDC2驾驶循环 离散风格标签+动态阈值调整[99 ] 驾驶风格驱动的扭矩阈值自适应 城市拥堵、高速巡航场景 在线采样+半监督支持向量机识别[100 ] 将驾驶风格作为额外状态输入 多模式驾驶场景 模糊聚类+学习向量量化网络识别[102 ] 工况分类重组与专家规则融合 城市/高速/郊区合成驾驶循环 自然驾驶数据采集+特征提取[103 ] 由固定路线数据驱动的训练集构建 郑州公交路线 交通流量数据驱动+知识嵌入[104 ] 驾驶场景建模与专业知识融合 实际交通流量场景
基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
Battery health-aware and deep reinforcement learning-based energy management for naturalistic data-driven driving scenarios
2
2022
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
... Comparison of driving information fusion methods based on feature fusion
Tab.3 方法 核心机制 验证场景 模糊聚类+混合状态空间设计[98 ] 驾驶风格耦合需求转矩 CCDC、RDC1、RDC2驾驶循环 离散风格标签+动态阈值调整[99 ] 驾驶风格驱动的扭矩阈值自适应 城市拥堵、高速巡航场景 在线采样+半监督支持向量机识别[100 ] 将驾驶风格作为额外状态输入 多模式驾驶场景 模糊聚类+学习向量量化网络识别[102 ] 工况分类重组与专家规则融合 城市/高速/郊区合成驾驶循环 自然驾驶数据采集+特征提取[103 ] 由固定路线数据驱动的训练集构建 郑州公交路线 交通流量数据驱动+知识嵌入[104 ] 驾驶场景建模与专业知识融合 实际交通流量场景
基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
Battery health-aware and naturalistic data-driven energy management for hybrid electric bus based on TD3 deep reinforcement learning algorithm
1
2022
... 驾驶风格作为行车信息的核心特征,通常由统计学方法或机器学习模型量化,并被进一步结合到DRL的状态变量中. 石月美[97 ] 从车辆速度数据中提取20维统计特征,经局部线性嵌入降维后生成驾驶风格系数,将其与需求转矩相乘后作为TD3算法的状态输入,结果表明考虑驾驶风格的策略的燃油经济性显著提高. Cui等[98 ] 采用模糊聚类算法对驾驶风格进行分类,结合修正后的需求转矩与车速、加速度构建混合状态空间,在3个驾驶循环(CCDC、RDC1、RDC2)下验证燃油效率提升了6.02%~9.68%. 这种特征提取、参数修正相结合的方式,避免了直接引入高维驾驶风格标签导致的训练复杂度上升问题,同时保留了风格特征对能量分配的动态影响. Zhang等[99 ] 将驾驶风格(激进、正常、保守)作为离散状态变量,在PPO算法中动态调整需求扭矩阈值,使车辆油耗降低了7.12%~11.5%. Wu等[100 ] 提出在线采样与半监督支持向量机训练结合的驾驶风格识别方法,并采取PPO算法,以驾驶风格作为额外的输入状态. 研究表明,在优化电池容量损失的目标下,减少了8.15%的电池容量损失,说明考虑驾驶风格可以提高EMS的效果. 针对静态工况数据导致的策略失配问题,研究者利用数据增强技术生成驾驶循环,或通过真实数据清洗与重组来构建多样化训练环境. 宋震[101 ] 提出基于长短期记忆(long short-term memory, LSTM)网络的车速预测模型,融合驾驶风格系数与实时路况信息以生成动态车速序列,并将其作为DDPG算法的输入;在不同典型工况下,该策略的燃油经济性与PMP策略相比达到了近似最优水平. Chang等[102 ] 采用主成分分析与模糊聚类方法对驾驶工况进行分类重组,构建包含城市、高速、郊区的合成训练集,通过学习向量量化网络在线识别工况类型,并整合专家经验的优势,局部调整和限制控制对象的状态和动作. Huang等[103 ] 使用Npos220惯性导航设备在中国郑州的固定公交路线上收集140万组原始驾驶数据并构建训练集,通过提取自然驾驶特征,缓解数据稀疏性导致的过拟合问题. Tang等[104 ] 从实际交通流量中收集数据,使用数据驱动方法来建立反映不同驾驶模式和行为的驾驶场景,并将专业知识嵌入深度确定性策略梯度中,在保证车辆性能的情况下实现了更快的收敛速度. Huang等[105 ] 通过自然数据驱动方法构建用于测试公交路线的特定驾驶周期,以准确评估混合动力公交车的实际运营成本. 这些方法的核心在于通过特征工程重构训练数据的分布,使DRL策略能够覆盖更多潜在驾驶场景,从而缓解因数据偏差导致的策略泛化性不足的问题. 归纳基于特征融合的行车信息融合方法,见表3 . ...
Deep reinforcement learning-based multi-objective control of hybrid power system combined with road recognition under time-varying environment
2
2022
... 基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
... Comparison of driving information fusion methods based on multi-source perception mapping
Tab.4 方法 核心机制 验证场景 VGG16视觉框架+惯性导航[106 ] 通过环境、车辆及控制对象融合,构建三维状态空间 雪地、湿滑沥青等5类道路 高精度地图/GPS/GIS集成[107 ] 利用前方坡度、温度、信号灯周期编码,实现能量预分配 城际快速路与城市主干道 未来地形感知DDPG算法[108 ] 根据当前及未来坡度嵌入状态空间,生成地形自适应功率指令 山区公路与连续坡道 滑动窗口+时序特征提取[109 ] V2X数据降维与车辆运动状态融合 城市交叉路口、高速公路 数据归一化+信息特征选择[110 ] 冗余参数剔除与多维信息嵌入 混合交通流场景 交通信号灯相位-车速关联奖励函数[111 ] 分段式负奖励触发与多目标优化项耦合 信号灯控制下的城市道路 基于实时拥堵指数的动态权重分配[112 ] 前车距离、限速、拥堵状况多目标融合 高峰时段的拥堵路况 LSTM工况特征提取+奖励函数自适应[113 ] 城郊场景差异化权重分配 城市-郊区驾驶循环
3.3. 行车信息引导的优化方法 通过融合高维时序行车数据与历史驾驶模式的特征,DRL框架能够应对复杂能量管理问题中的多目标优化任务,在燃油经济性、电池寿命、驾驶舒适性等冲突目标之间寻求帕累托最优解,同时增强了策略对未知驾驶场景的泛化性以及跨车型、跨场景的迁移适应性. ...
Health-conscious deep reinforcement learning energy management for fuel cell buses integrating environmental and look-ahead road information
2
2024
... 基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
... Comparison of driving information fusion methods based on multi-source perception mapping
Tab.4 方法 核心机制 验证场景 VGG16视觉框架+惯性导航[106 ] 通过环境、车辆及控制对象融合,构建三维状态空间 雪地、湿滑沥青等5类道路 高精度地图/GPS/GIS集成[107 ] 利用前方坡度、温度、信号灯周期编码,实现能量预分配 城际快速路与城市主干道 未来地形感知DDPG算法[108 ] 根据当前及未来坡度嵌入状态空间,生成地形自适应功率指令 山区公路与连续坡道 滑动窗口+时序特征提取[109 ] V2X数据降维与车辆运动状态融合 城市交叉路口、高速公路 数据归一化+信息特征选择[110 ] 冗余参数剔除与多维信息嵌入 混合交通流场景 交通信号灯相位-车速关联奖励函数[111 ] 分段式负奖励触发与多目标优化项耦合 信号灯控制下的城市道路 基于实时拥堵指数的动态权重分配[112 ] 前车距离、限速、拥堵状况多目标融合 高峰时段的拥堵路况 LSTM工况特征提取+奖励函数自适应[113 ] 城郊场景差异化权重分配 城市-郊区驾驶循环
3.3. 行车信息引导的优化方法 通过融合高维时序行车数据与历史驾驶模式的特征,DRL框架能够应对复杂能量管理问题中的多目标优化任务,在燃油经济性、电池寿命、驾驶舒适性等冲突目标之间寻求帕累托最优解,同时增强了策略对未知驾驶场景的泛化性以及跨车型、跨场景的迁移适应性. ...
Energy sources durability energy management for fuel cell hybrid electric bus based on deep reinforcement learning considering future terrain information
2
2024
... 基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
... Comparison of driving information fusion methods based on multi-source perception mapping
Tab.4 方法 核心机制 验证场景 VGG16视觉框架+惯性导航[106 ] 通过环境、车辆及控制对象融合,构建三维状态空间 雪地、湿滑沥青等5类道路 高精度地图/GPS/GIS集成[107 ] 利用前方坡度、温度、信号灯周期编码,实现能量预分配 城际快速路与城市主干道 未来地形感知DDPG算法[108 ] 根据当前及未来坡度嵌入状态空间,生成地形自适应功率指令 山区公路与连续坡道 滑动窗口+时序特征提取[109 ] V2X数据降维与车辆运动状态融合 城市交叉路口、高速公路 数据归一化+信息特征选择[110 ] 冗余参数剔除与多维信息嵌入 混合交通流场景 交通信号灯相位-车速关联奖励函数[111 ] 分段式负奖励触发与多目标优化项耦合 信号灯控制下的城市道路 基于实时拥堵指数的动态权重分配[112 ] 前车距离、限速、拥堵状况多目标融合 高峰时段的拥堵路况 LSTM工况特征提取+奖励函数自适应[113 ] 城郊场景差异化权重分配 城市-郊区驾驶循环
3.3. 行车信息引导的优化方法 通过融合高维时序行车数据与历史驾驶模式的特征,DRL框架能够应对复杂能量管理问题中的多目标优化任务,在燃油经济性、电池寿命、驾驶舒适性等冲突目标之间寻求帕累托最优解,同时增强了策略对未知驾驶场景的泛化性以及跨车型、跨场景的迁移适应性. ...
Real-time HEV energy management strategy considering road congestion based on deep reinforcement learning
2
2021
... 基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
... Comparison of driving information fusion methods based on multi-source perception mapping
Tab.4 方法 核心机制 验证场景 VGG16视觉框架+惯性导航[106 ] 通过环境、车辆及控制对象融合,构建三维状态空间 雪地、湿滑沥青等5类道路 高精度地图/GPS/GIS集成[107 ] 利用前方坡度、温度、信号灯周期编码,实现能量预分配 城际快速路与城市主干道 未来地形感知DDPG算法[108 ] 根据当前及未来坡度嵌入状态空间,生成地形自适应功率指令 山区公路与连续坡道 滑动窗口+时序特征提取[109 ] V2X数据降维与车辆运动状态融合 城市交叉路口、高速公路 数据归一化+信息特征选择[110 ] 冗余参数剔除与多维信息嵌入 混合交通流场景 交通信号灯相位-车速关联奖励函数[111 ] 分段式负奖励触发与多目标优化项耦合 信号灯控制下的城市道路 基于实时拥堵指数的动态权重分配[112 ] 前车距离、限速、拥堵状况多目标融合 高峰时段的拥堵路况 LSTM工况特征提取+奖励函数自适应[113 ] 城郊场景差异化权重分配 城市-郊区驾驶循环
3.3. 行车信息引导的优化方法 通过融合高维时序行车数据与历史驾驶模式的特征,DRL框架能够应对复杂能量管理问题中的多目标优化任务,在燃油经济性、电池寿命、驾驶舒适性等冲突目标之间寻求帕累托最优解,同时增强了策略对未知驾驶场景的泛化性以及跨车型、跨场景的迁移适应性. ...
A data-driven solution for intelligent power allocation of connected hybrid electric vehicles inspired by offline deep reinforcement learning in V2X scenario
2
2024
... 基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
... Comparison of driving information fusion methods based on multi-source perception mapping
Tab.4 方法 核心机制 验证场景 VGG16视觉框架+惯性导航[106 ] 通过环境、车辆及控制对象融合,构建三维状态空间 雪地、湿滑沥青等5类道路 高精度地图/GPS/GIS集成[107 ] 利用前方坡度、温度、信号灯周期编码,实现能量预分配 城际快速路与城市主干道 未来地形感知DDPG算法[108 ] 根据当前及未来坡度嵌入状态空间,生成地形自适应功率指令 山区公路与连续坡道 滑动窗口+时序特征提取[109 ] V2X数据降维与车辆运动状态融合 城市交叉路口、高速公路 数据归一化+信息特征选择[110 ] 冗余参数剔除与多维信息嵌入 混合交通流场景 交通信号灯相位-车速关联奖励函数[111 ] 分段式负奖励触发与多目标优化项耦合 信号灯控制下的城市道路 基于实时拥堵指数的动态权重分配[112 ] 前车距离、限速、拥堵状况多目标融合 高峰时段的拥堵路况 LSTM工况特征提取+奖励函数自适应[113 ] 城郊场景差异化权重分配 城市-郊区驾驶循环
3.3. 行车信息引导的优化方法 通过融合高维时序行车数据与历史驾驶模式的特征,DRL框架能够应对复杂能量管理问题中的多目标优化任务,在燃油经济性、电池寿命、驾驶舒适性等冲突目标之间寻求帕累托最优解,同时增强了策略对未知驾驶场景的泛化性以及跨车型、跨场景的迁移适应性. ...
Deep reinforcement learning and reward shaping based eco-driving control for automated HEVs among signalized intersections
2
2022
... 基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
... Comparison of driving information fusion methods based on multi-source perception mapping
Tab.4 方法 核心机制 验证场景 VGG16视觉框架+惯性导航[106 ] 通过环境、车辆及控制对象融合,构建三维状态空间 雪地、湿滑沥青等5类道路 高精度地图/GPS/GIS集成[107 ] 利用前方坡度、温度、信号灯周期编码,实现能量预分配 城际快速路与城市主干道 未来地形感知DDPG算法[108 ] 根据当前及未来坡度嵌入状态空间,生成地形自适应功率指令 山区公路与连续坡道 滑动窗口+时序特征提取[109 ] V2X数据降维与车辆运动状态融合 城市交叉路口、高速公路 数据归一化+信息特征选择[110 ] 冗余参数剔除与多维信息嵌入 混合交通流场景 交通信号灯相位-车速关联奖励函数[111 ] 分段式负奖励触发与多目标优化项耦合 信号灯控制下的城市道路 基于实时拥堵指数的动态权重分配[112 ] 前车距离、限速、拥堵状况多目标融合 高峰时段的拥堵路况 LSTM工况特征提取+奖励函数自适应[113 ] 城郊场景差异化权重分配 城市-郊区驾驶循环
3.3. 行车信息引导的优化方法 通过融合高维时序行车数据与历史驾驶模式的特征,DRL框架能够应对复杂能量管理问题中的多目标优化任务,在燃油经济性、电池寿命、驾驶舒适性等冲突目标之间寻求帕累托最优解,同时增强了策略对未知驾驶场景的泛化性以及跨车型、跨场景的迁移适应性. ...
A deep reinforcement learning based hierarchical eco-driving strategy for connected and automated HEVs
2
2023
... 基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
... Comparison of driving information fusion methods based on multi-source perception mapping
Tab.4 方法 核心机制 验证场景 VGG16视觉框架+惯性导航[106 ] 通过环境、车辆及控制对象融合,构建三维状态空间 雪地、湿滑沥青等5类道路 高精度地图/GPS/GIS集成[107 ] 利用前方坡度、温度、信号灯周期编码,实现能量预分配 城际快速路与城市主干道 未来地形感知DDPG算法[108 ] 根据当前及未来坡度嵌入状态空间,生成地形自适应功率指令 山区公路与连续坡道 滑动窗口+时序特征提取[109 ] V2X数据降维与车辆运动状态融合 城市交叉路口、高速公路 数据归一化+信息特征选择[110 ] 冗余参数剔除与多维信息嵌入 混合交通流场景 交通信号灯相位-车速关联奖励函数[111 ] 分段式负奖励触发与多目标优化项耦合 信号灯控制下的城市道路 基于实时拥堵指数的动态权重分配[112 ] 前车距离、限速、拥堵状况多目标融合 高峰时段的拥堵路况 LSTM工况特征提取+奖励函数自适应[113 ] 城郊场景差异化权重分配 城市-郊区驾驶循环
3.3. 行车信息引导的优化方法 通过融合高维时序行车数据与历史驾驶模式的特征,DRL框架能够应对复杂能量管理问题中的多目标优化任务,在燃油经济性、电池寿命、驾驶舒适性等冲突目标之间寻求帕累托最优解,同时增强了策略对未知驾驶场景的泛化性以及跨车型、跨场景的迁移适应性. ...
Adaptive deep reinforcement learning energy management for hybrid electric vehicles considering driving condition recognition
2
2024
... 基于多源感知映射的行车信息融合方法如表4 所示. 相较于基于特征工程的间接融合,基于多源感知的直接映射方法利用异构传感器与通信技术实时采集车辆及环境参数,构建高维连续状态空间以实现动态决策优化. Chen等[106 ] 提出基于VGG16视觉框架的道路特征提取方法,从3602 张道路图像中识别雪地、湿滑沥青等5类道路类型,并结合坡度角、车辆状态(如乘客参数)及环境信息构建三维状态空间. Jia等[107 ] 进一步集成高精度地图、GPS以及GIS技术,将前方路段坡度、温度及交通信号灯周期编码至状态空间,实现前瞻性能量预分配. Li等[108 ] 提出考虑未来地形信息的EMS,通过网络系统将车辆驱动状态、当前道路坡度和未来道路坡度等地形信息集成到状态空间中,输出地形感知型功率指令. 针对状态空间维度爆炸的问题,Inuzuka等[109 ] 通过将车辆运动状态与V2X(V2V与V2I)等实时数据作为状态输入,采用滑动窗口与时序特征提取技术降低由高维数据带来的复杂度,显著提升DRL模型的收敛效率. Niu等[110 ] 通过数据归一化与信息特征选择来剔除冗余行车参数,将交通流数据、车辆速度和电池状态等多维行车信息嵌入状态空间. 进一步地,基于V2X技术设计实时更新框架,通过多车协同采集样本数据,定期调整EMS的控制参数. 这些方法利用ITS、车载传感器与车联网技术,将道路拓扑、交通动态等外部信息转化为可解析的状态变量,从而增强DRL策略对复杂驾驶场景的适应性. 通过将实时行车信息嵌入奖励函数的结构化设计,DRL策略能够根据场景需求动态平衡燃油经济性、电池健康与驾驶舒适性等冲突目标. Li等[111 ] 将交通信号灯与车辆速度动态关联,设计分段式奖励函数,当车辆速度偏离绿灯通行速度区间时触发负奖励,并结合燃油消耗率与电池安全阈值构建多目标优化项,使燃油经济性提升了10.5%~14.9%. 进一步地,Wu等[112 ] 提出基于实时道路拥堵指数的奖励权重分配机制,在速度优化层中嵌入前车距离、道路限速及实时拥堵状况作为动态权重因子,构建包含油耗奖励、跟车安全奖励与舒适性惩罚的多目标函数,并结合红绿灯规则约束生成竞争决策信号,降低了复杂城市工况下的燃油消耗量. Zhang等[113 ] 利用LSTM提取历史驾驶工况特征,针对城、郊场景差异性自适应调整奖励函数权重(如郊区工况侧重于燃油经济性,城市工况下须平衡SOC稳定性),验证了行车信息驱动下策略的泛化能力. 通过对行车信息进行特征提取与量化建模,将其转化为奖励函数的分量或权重系数,从而引导DRL策略在训练过程中同步优化冲突目标. 这种融合方式不仅增强了奖励函数对行车场景的表征能力,而且借助环境反馈的实时性降低了策略的局部最优风险,为混合动力车辆的多维度能量管理提供了可扩展的技术框架. ...
... Comparison of driving information fusion methods based on multi-source perception mapping
Tab.4 方法 核心机制 验证场景 VGG16视觉框架+惯性导航[106 ] 通过环境、车辆及控制对象融合,构建三维状态空间 雪地、湿滑沥青等5类道路 高精度地图/GPS/GIS集成[107 ] 利用前方坡度、温度、信号灯周期编码,实现能量预分配 城际快速路与城市主干道 未来地形感知DDPG算法[108 ] 根据当前及未来坡度嵌入状态空间,生成地形自适应功率指令 山区公路与连续坡道 滑动窗口+时序特征提取[109 ] V2X数据降维与车辆运动状态融合 城市交叉路口、高速公路 数据归一化+信息特征选择[110 ] 冗余参数剔除与多维信息嵌入 混合交通流场景 交通信号灯相位-车速关联奖励函数[111 ] 分段式负奖励触发与多目标优化项耦合 信号灯控制下的城市道路 基于实时拥堵指数的动态权重分配[112 ] 前车距离、限速、拥堵状况多目标融合 高峰时段的拥堵路况 LSTM工况特征提取+奖励函数自适应[113 ] 城郊场景差异化权重分配 城市-郊区驾驶循环
3.3. 行车信息引导的优化方法 通过融合高维时序行车数据与历史驾驶模式的特征,DRL框架能够应对复杂能量管理问题中的多目标优化任务,在燃油经济性、电池寿命、驾驶舒适性等冲突目标之间寻求帕累托最优解,同时增强了策略对未知驾驶场景的泛化性以及跨车型、跨场景的迁移适应性. ...
Terrain information-involved power allocation optimization for fuel cell/battery/ultracapacitor hybrid electric vehicles via an improved deep reinforcement learning
1
2023
... DRL通过设计综合奖励函数,驱动EMS实现多目标协同优化,为高效能源利用提供了重要途径. Tao等[114 ] 在历史数据驱动下构建地形信息感知型能量需求预测模型,将地形信息动态融入奖励函数设计,在降低燃料消耗的同时抑制了燃料电池与锂电池的老化速率,其复合奖励函数验证了地形数据对多目标权衡的指导作用. Huang等[115 ] 利用自然驾驶数据合成混合驾驶循环,构建多维场景导向的驾驶循环,这一方法有助于捕捉城市与郊区等不同工况下的能源需求变化,实现不同运行条件下的多目标优化. 一些研究采用车路云协同方法,将实时外部环境信息嵌入状态空间,优化输出功率或自适应调整电池状态,在保证能效的同时兼顾车辆健康和运行安全. Jia等[116 ] 综合利用车载传感器和车云基础设施,将未来道路坡度、环境温度、交通信号相位及座舱热力学模型整合至状态空间,实现了对燃料电池功率与电池SOC的动态协同控制,从而在城市场景下同步优化能耗与乘客舒适性. Li等[117 ] 利用宏观交通流预测结果重构生态驾驶策略,基于DDPG算法生成的加速曲线在节能、驾驶平顺性与交通效率之间达成帕累托最优,这表明宏观交通特征的引入对车辆驾驶策略的制定产生了积极影响. 此外,将专家知识嵌入生成对抗训练或模仿学习框架中,能够在多目标奖励函数设计上更好地平衡燃油经济性、排放控制等问题. Li等[118 ] 提出知识导向型DRL框架,将基于规则的参考策略与SAC中的策略网络耦合,通过策略网络与参考策略的偏差约束实现燃油经济性、排放控制与部件寿命的均衡优化. Huang等[119 ] 结合自然驾驶数据的工况特征改进SAC算法,设计具有时序注意力机制的经验回放池,使混合动力车辆在真实城郊路网中实现了节能减排和SOC维持的多目标优化. ...
Deep reinforcement learning based energy management strategy considering running costs and energy source aging for fuel cell hybrid electric vehicle
1
2023
... DRL通过设计综合奖励函数,驱动EMS实现多目标协同优化,为高效能源利用提供了重要途径. Tao等[114 ] 在历史数据驱动下构建地形信息感知型能量需求预测模型,将地形信息动态融入奖励函数设计,在降低燃料消耗的同时抑制了燃料电池与锂电池的老化速率,其复合奖励函数验证了地形数据对多目标权衡的指导作用. Huang等[115 ] 利用自然驾驶数据合成混合驾驶循环,构建多维场景导向的驾驶循环,这一方法有助于捕捉城市与郊区等不同工况下的能源需求变化,实现不同运行条件下的多目标优化. 一些研究采用车路云协同方法,将实时外部环境信息嵌入状态空间,优化输出功率或自适应调整电池状态,在保证能效的同时兼顾车辆健康和运行安全. Jia等[116 ] 综合利用车载传感器和车云基础设施,将未来道路坡度、环境温度、交通信号相位及座舱热力学模型整合至状态空间,实现了对燃料电池功率与电池SOC的动态协同控制,从而在城市场景下同步优化能耗与乘客舒适性. Li等[117 ] 利用宏观交通流预测结果重构生态驾驶策略,基于DDPG算法生成的加速曲线在节能、驾驶平顺性与交通效率之间达成帕累托最优,这表明宏观交通特征的引入对车辆驾驶策略的制定产生了积极影响. 此外,将专家知识嵌入生成对抗训练或模仿学习框架中,能够在多目标奖励函数设计上更好地平衡燃油经济性、排放控制等问题. Li等[118 ] 提出知识导向型DRL框架,将基于规则的参考策略与SAC中的策略网络耦合,通过策略网络与参考策略的偏差约束实现燃油经济性、排放控制与部件寿命的均衡优化. Huang等[119 ] 结合自然驾驶数据的工况特征改进SAC算法,设计具有时序注意力机制的经验回放池,使混合动力车辆在真实城郊路网中实现了节能减排和SOC维持的多目标优化. ...
Deep reinforcement learning-based energy management strategy for fuel cell buses integrating future road information and cabin comfort control
1
2024
... DRL通过设计综合奖励函数,驱动EMS实现多目标协同优化,为高效能源利用提供了重要途径. Tao等[114 ] 在历史数据驱动下构建地形信息感知型能量需求预测模型,将地形信息动态融入奖励函数设计,在降低燃料消耗的同时抑制了燃料电池与锂电池的老化速率,其复合奖励函数验证了地形数据对多目标权衡的指导作用. Huang等[115 ] 利用自然驾驶数据合成混合驾驶循环,构建多维场景导向的驾驶循环,这一方法有助于捕捉城市与郊区等不同工况下的能源需求变化,实现不同运行条件下的多目标优化. 一些研究采用车路云协同方法,将实时外部环境信息嵌入状态空间,优化输出功率或自适应调整电池状态,在保证能效的同时兼顾车辆健康和运行安全. Jia等[116 ] 综合利用车载传感器和车云基础设施,将未来道路坡度、环境温度、交通信号相位及座舱热力学模型整合至状态空间,实现了对燃料电池功率与电池SOC的动态协同控制,从而在城市场景下同步优化能耗与乘客舒适性. Li等[117 ] 利用宏观交通流预测结果重构生态驾驶策略,基于DDPG算法生成的加速曲线在节能、驾驶平顺性与交通效率之间达成帕累托最优,这表明宏观交通特征的引入对车辆驾驶策略的制定产生了积极影响. 此外,将专家知识嵌入生成对抗训练或模仿学习框架中,能够在多目标奖励函数设计上更好地平衡燃油经济性、排放控制等问题. Li等[118 ] 提出知识导向型DRL框架,将基于规则的参考策略与SAC中的策略网络耦合,通过策略网络与参考策略的偏差约束实现燃油经济性、排放控制与部件寿命的均衡优化. Huang等[119 ] 结合自然驾驶数据的工况特征改进SAC算法,设计具有时序注意力机制的经验回放池,使混合动力车辆在真实城郊路网中实现了节能减排和SOC维持的多目标优化. ...
Hierarchical intelligent energy-saving control strategy for fuel cell hybrid electric buses based on traffic flow predictions
1
2024
... DRL通过设计综合奖励函数,驱动EMS实现多目标协同优化,为高效能源利用提供了重要途径. Tao等[114 ] 在历史数据驱动下构建地形信息感知型能量需求预测模型,将地形信息动态融入奖励函数设计,在降低燃料消耗的同时抑制了燃料电池与锂电池的老化速率,其复合奖励函数验证了地形数据对多目标权衡的指导作用. Huang等[115 ] 利用自然驾驶数据合成混合驾驶循环,构建多维场景导向的驾驶循环,这一方法有助于捕捉城市与郊区等不同工况下的能源需求变化,实现不同运行条件下的多目标优化. 一些研究采用车路云协同方法,将实时外部环境信息嵌入状态空间,优化输出功率或自适应调整电池状态,在保证能效的同时兼顾车辆健康和运行安全. Jia等[116 ] 综合利用车载传感器和车云基础设施,将未来道路坡度、环境温度、交通信号相位及座舱热力学模型整合至状态空间,实现了对燃料电池功率与电池SOC的动态协同控制,从而在城市场景下同步优化能耗与乘客舒适性. Li等[117 ] 利用宏观交通流预测结果重构生态驾驶策略,基于DDPG算法生成的加速曲线在节能、驾驶平顺性与交通效率之间达成帕累托最优,这表明宏观交通特征的引入对车辆驾驶策略的制定产生了积极影响. 此外,将专家知识嵌入生成对抗训练或模仿学习框架中,能够在多目标奖励函数设计上更好地平衡燃油经济性、排放控制等问题. Li等[118 ] 提出知识导向型DRL框架,将基于规则的参考策略与SAC中的策略网络耦合,通过策略网络与参考策略的偏差约束实现燃油经济性、排放控制与部件寿命的均衡优化. Huang等[119 ] 结合自然驾驶数据的工况特征改进SAC算法,设计具有时序注意力机制的经验回放池,使混合动力车辆在真实城郊路网中实现了节能减排和SOC维持的多目标优化. ...
Knowledge-guided deep reinforcement learning for multiobjective energy management of fuel cell electric vehicles
1
2025
... DRL通过设计综合奖励函数,驱动EMS实现多目标协同优化,为高效能源利用提供了重要途径. Tao等[114 ] 在历史数据驱动下构建地形信息感知型能量需求预测模型,将地形信息动态融入奖励函数设计,在降低燃料消耗的同时抑制了燃料电池与锂电池的老化速率,其复合奖励函数验证了地形数据对多目标权衡的指导作用. Huang等[115 ] 利用自然驾驶数据合成混合驾驶循环,构建多维场景导向的驾驶循环,这一方法有助于捕捉城市与郊区等不同工况下的能源需求变化,实现不同运行条件下的多目标优化. 一些研究采用车路云协同方法,将实时外部环境信息嵌入状态空间,优化输出功率或自适应调整电池状态,在保证能效的同时兼顾车辆健康和运行安全. Jia等[116 ] 综合利用车载传感器和车云基础设施,将未来道路坡度、环境温度、交通信号相位及座舱热力学模型整合至状态空间,实现了对燃料电池功率与电池SOC的动态协同控制,从而在城市场景下同步优化能耗与乘客舒适性. Li等[117 ] 利用宏观交通流预测结果重构生态驾驶策略,基于DDPG算法生成的加速曲线在节能、驾驶平顺性与交通效率之间达成帕累托最优,这表明宏观交通特征的引入对车辆驾驶策略的制定产生了积极影响. 此外,将专家知识嵌入生成对抗训练或模仿学习框架中,能够在多目标奖励函数设计上更好地平衡燃油经济性、排放控制等问题. Li等[118 ] 提出知识导向型DRL框架,将基于规则的参考策略与SAC中的策略网络耦合,通过策略网络与参考策略的偏差约束实现燃油经济性、排放控制与部件寿命的均衡优化. Huang等[119 ] 结合自然驾驶数据的工况特征改进SAC算法,设计具有时序注意力机制的经验回放池,使混合动力车辆在真实城郊路网中实现了节能减排和SOC维持的多目标优化. ...
Naturalistic data-driven and emission reduction-conscious energy management for hybrid electric vehicle based on improved soft actor-critic algorithm
1
2023
... DRL通过设计综合奖励函数,驱动EMS实现多目标协同优化,为高效能源利用提供了重要途径. Tao等[114 ] 在历史数据驱动下构建地形信息感知型能量需求预测模型,将地形信息动态融入奖励函数设计,在降低燃料消耗的同时抑制了燃料电池与锂电池的老化速率,其复合奖励函数验证了地形数据对多目标权衡的指导作用. Huang等[115 ] 利用自然驾驶数据合成混合驾驶循环,构建多维场景导向的驾驶循环,这一方法有助于捕捉城市与郊区等不同工况下的能源需求变化,实现不同运行条件下的多目标优化. 一些研究采用车路云协同方法,将实时外部环境信息嵌入状态空间,优化输出功率或自适应调整电池状态,在保证能效的同时兼顾车辆健康和运行安全. Jia等[116 ] 综合利用车载传感器和车云基础设施,将未来道路坡度、环境温度、交通信号相位及座舱热力学模型整合至状态空间,实现了对燃料电池功率与电池SOC的动态协同控制,从而在城市场景下同步优化能耗与乘客舒适性. Li等[117 ] 利用宏观交通流预测结果重构生态驾驶策略,基于DDPG算法生成的加速曲线在节能、驾驶平顺性与交通效率之间达成帕累托最优,这表明宏观交通特征的引入对车辆驾驶策略的制定产生了积极影响. 此外,将专家知识嵌入生成对抗训练或模仿学习框架中,能够在多目标奖励函数设计上更好地平衡燃油经济性、排放控制等问题. Li等[118 ] 提出知识导向型DRL框架,将基于规则的参考策略与SAC中的策略网络耦合,通过策略网络与参考策略的偏差约束实现燃油经济性、排放控制与部件寿命的均衡优化. Huang等[119 ] 结合自然驾驶数据的工况特征改进SAC算法,设计具有时序注意力机制的经验回放池,使混合动力车辆在真实城郊路网中实现了节能减排和SOC维持的多目标优化. ...
1
... 基于DRL的EMS在实际部署中面临显著的跨场景泛化性挑战. Cheng等[120 -121 ] 指出,DRL的纯数据驱动特性致使策略性能高度依赖于训练域分布特性,但是现实世界的复杂性使得训练域难以覆盖所有驾驶场景,导致其性能在偏离训练域时显著衰退. Van Baar等[122 ] 进一步强调sim2real问题,即在仿真环境中训练良好的EMS在真实驾驶中往往表现不佳. 为了突破上述限制,通过多源传感器信息集成来实现高保真状态表征,不仅能够更准确地反映实际驾驶情境,而且为跨场景应用下的EMS优化提供了有力支持. Liu等[123 -124 ] 利用自然驾驶大数据构建特定训练周期,精确再现城市与郊区中的实际驾驶场景,显著提升了EMS在不同工况下的泛化性能. Li等[125 ] 采用多源数据训练LSTM车速预测模型,并通过车路云协同系统优化云端电池输出功率,为EMS提供动态环境反馈,使系统能够自适应地调整输出功率以应对多变的驾驶情境. Hu等[126 -127 ] 提出对抗学习方法,结合多模态数据与专家指导模型,进一步优化了策略在动态环境下的稳定性和智能性. 综上,利用多源行车信息进行数据扩充、协同优化与对抗训练,为基于DRL的EMS在真实驾驶场景中的泛化性提升提供了有力的技术支撑. ...
Maximum diffusion reinforcement learning
1
2024
... 基于DRL的EMS在实际部署中面临显著的跨场景泛化性挑战. Cheng等[120 -121 ] 指出,DRL的纯数据驱动特性致使策略性能高度依赖于训练域分布特性,但是现实世界的复杂性使得训练域难以覆盖所有驾驶场景,导致其性能在偏离训练域时显著衰退. Van Baar等[122 ] 进一步强调sim2real问题,即在仿真环境中训练良好的EMS在真实驾驶中往往表现不佳. 为了突破上述限制,通过多源传感器信息集成来实现高保真状态表征,不仅能够更准确地反映实际驾驶情境,而且为跨场景应用下的EMS优化提供了有力支持. Liu等[123 -124 ] 利用自然驾驶大数据构建特定训练周期,精确再现城市与郊区中的实际驾驶场景,显著提升了EMS在不同工况下的泛化性能. Li等[125 ] 采用多源数据训练LSTM车速预测模型,并通过车路云协同系统优化云端电池输出功率,为EMS提供动态环境反馈,使系统能够自适应地调整输出功率以应对多变的驾驶情境. Hu等[126 -127 ] 提出对抗学习方法,结合多模态数据与专家指导模型,进一步优化了策略在动态环境下的稳定性和智能性. 综上,利用多源行车信息进行数据扩充、协同优化与对抗训练,为基于DRL的EMS在真实驾驶场景中的泛化性提升提供了有力的技术支撑. ...
1
... 基于DRL的EMS在实际部署中面临显著的跨场景泛化性挑战. Cheng等[120 -121 ] 指出,DRL的纯数据驱动特性致使策略性能高度依赖于训练域分布特性,但是现实世界的复杂性使得训练域难以覆盖所有驾驶场景,导致其性能在偏离训练域时显著衰退. Van Baar等[122 ] 进一步强调sim2real问题,即在仿真环境中训练良好的EMS在真实驾驶中往往表现不佳. 为了突破上述限制,通过多源传感器信息集成来实现高保真状态表征,不仅能够更准确地反映实际驾驶情境,而且为跨场景应用下的EMS优化提供了有力支持. Liu等[123 -124 ] 利用自然驾驶大数据构建特定训练周期,精确再现城市与郊区中的实际驾驶场景,显著提升了EMS在不同工况下的泛化性能. Li等[125 ] 采用多源数据训练LSTM车速预测模型,并通过车路云协同系统优化云端电池输出功率,为EMS提供动态环境反馈,使系统能够自适应地调整输出功率以应对多变的驾驶情境. Hu等[126 -127 ] 提出对抗学习方法,结合多模态数据与专家指导模型,进一步优化了策略在动态环境下的稳定性和智能性. 综上,利用多源行车信息进行数据扩充、协同优化与对抗训练,为基于DRL的EMS在真实驾驶场景中的泛化性提升提供了有力的技术支撑. ...
Real-time energy management for HEV combining naturalistic driving data and deep reinforcement learning with high generalization
1
2025
... 基于DRL的EMS在实际部署中面临显著的跨场景泛化性挑战. Cheng等[120 -121 ] 指出,DRL的纯数据驱动特性致使策略性能高度依赖于训练域分布特性,但是现实世界的复杂性使得训练域难以覆盖所有驾驶场景,导致其性能在偏离训练域时显著衰退. Van Baar等[122 ] 进一步强调sim2real问题,即在仿真环境中训练良好的EMS在真实驾驶中往往表现不佳. 为了突破上述限制,通过多源传感器信息集成来实现高保真状态表征,不仅能够更准确地反映实际驾驶情境,而且为跨场景应用下的EMS优化提供了有力支持. Liu等[123 -124 ] 利用自然驾驶大数据构建特定训练周期,精确再现城市与郊区中的实际驾驶场景,显著提升了EMS在不同工况下的泛化性能. Li等[125 ] 采用多源数据训练LSTM车速预测模型,并通过车路云协同系统优化云端电池输出功率,为EMS提供动态环境反馈,使系统能够自适应地调整输出功率以应对多变的驾驶情境. Hu等[126 -127 ] 提出对抗学习方法,结合多模态数据与专家指导模型,进一步优化了策略在动态环境下的稳定性和智能性. 综上,利用多源行车信息进行数据扩充、协同优化与对抗训练,为基于DRL的EMS在真实驾驶场景中的泛化性提升提供了有力的技术支撑. ...
Deep reinforcement learning-based energy management for heavy duty HEV considering discrete-continuous hybrid action space
1
2024
... 基于DRL的EMS在实际部署中面临显著的跨场景泛化性挑战. Cheng等[120 -121 ] 指出,DRL的纯数据驱动特性致使策略性能高度依赖于训练域分布特性,但是现实世界的复杂性使得训练域难以覆盖所有驾驶场景,导致其性能在偏离训练域时显著衰退. Van Baar等[122 ] 进一步强调sim2real问题,即在仿真环境中训练良好的EMS在真实驾驶中往往表现不佳. 为了突破上述限制,通过多源传感器信息集成来实现高保真状态表征,不仅能够更准确地反映实际驾驶情境,而且为跨场景应用下的EMS优化提供了有力支持. Liu等[123 -124 ] 利用自然驾驶大数据构建特定训练周期,精确再现城市与郊区中的实际驾驶场景,显著提升了EMS在不同工况下的泛化性能. Li等[125 ] 采用多源数据训练LSTM车速预测模型,并通过车路云协同系统优化云端电池输出功率,为EMS提供动态环境反馈,使系统能够自适应地调整输出功率以应对多变的驾驶情境. Hu等[126 -127 ] 提出对抗学习方法,结合多模态数据与专家指导模型,进一步优化了策略在动态环境下的稳定性和智能性. 综上,利用多源行车信息进行数据扩充、协同优化与对抗训练,为基于DRL的EMS在真实驾驶场景中的泛化性提升提供了有力的技术支撑. ...
Real-time multiobjective EMS for fuel cell vehicle considering energy source health awareness under unknown real-world conditions
1
2025
... 基于DRL的EMS在实际部署中面临显著的跨场景泛化性挑战. Cheng等[120 -121 ] 指出,DRL的纯数据驱动特性致使策略性能高度依赖于训练域分布特性,但是现实世界的复杂性使得训练域难以覆盖所有驾驶场景,导致其性能在偏离训练域时显著衰退. Van Baar等[122 ] 进一步强调sim2real问题,即在仿真环境中训练良好的EMS在真实驾驶中往往表现不佳. 为了突破上述限制,通过多源传感器信息集成来实现高保真状态表征,不仅能够更准确地反映实际驾驶情境,而且为跨场景应用下的EMS优化提供了有力支持. Liu等[123 -124 ] 利用自然驾驶大数据构建特定训练周期,精确再现城市与郊区中的实际驾驶场景,显著提升了EMS在不同工况下的泛化性能. Li等[125 ] 采用多源数据训练LSTM车速预测模型,并通过车路云协同系统优化云端电池输出功率,为EMS提供动态环境反馈,使系统能够自适应地调整输出功率以应对多变的驾驶情境. Hu等[126 -127 ] 提出对抗学习方法,结合多模态数据与专家指导模型,进一步优化了策略在动态环境下的稳定性和智能性. 综上,利用多源行车信息进行数据扩充、协同优化与对抗训练,为基于DRL的EMS在真实驾驶场景中的泛化性提升提供了有力的技术支撑. ...
Enhancing data-driven energy management strategy via digital expert guidance for electrified vehicles
1
2025
... 基于DRL的EMS在实际部署中面临显著的跨场景泛化性挑战. Cheng等[120 -121 ] 指出,DRL的纯数据驱动特性致使策略性能高度依赖于训练域分布特性,但是现实世界的复杂性使得训练域难以覆盖所有驾驶场景,导致其性能在偏离训练域时显著衰退. Van Baar等[122 ] 进一步强调sim2real问题,即在仿真环境中训练良好的EMS在真实驾驶中往往表现不佳. 为了突破上述限制,通过多源传感器信息集成来实现高保真状态表征,不仅能够更准确地反映实际驾驶情境,而且为跨场景应用下的EMS优化提供了有力支持. Liu等[123 -124 ] 利用自然驾驶大数据构建特定训练周期,精确再现城市与郊区中的实际驾驶场景,显著提升了EMS在不同工况下的泛化性能. Li等[125 ] 采用多源数据训练LSTM车速预测模型,并通过车路云协同系统优化云端电池输出功率,为EMS提供动态环境反馈,使系统能够自适应地调整输出功率以应对多变的驾驶情境. Hu等[126 -127 ] 提出对抗学习方法,结合多模态数据与专家指导模型,进一步优化了策略在动态环境下的稳定性和智能性. 综上,利用多源行车信息进行数据扩充、协同优化与对抗训练,为基于DRL的EMS在真实驾驶场景中的泛化性提升提供了有力的技术支撑. ...
Global optimization guided energy management strategy for hybrid electric vehicles based on generative adversarial network embedded reinforcement learning
1
2025
... 基于DRL的EMS在实际部署中面临显著的跨场景泛化性挑战. Cheng等[120 -121 ] 指出,DRL的纯数据驱动特性致使策略性能高度依赖于训练域分布特性,但是现实世界的复杂性使得训练域难以覆盖所有驾驶场景,导致其性能在偏离训练域时显著衰退. Van Baar等[122 ] 进一步强调sim2real问题,即在仿真环境中训练良好的EMS在真实驾驶中往往表现不佳. 为了突破上述限制,通过多源传感器信息集成来实现高保真状态表征,不仅能够更准确地反映实际驾驶情境,而且为跨场景应用下的EMS优化提供了有力支持. Liu等[123 -124 ] 利用自然驾驶大数据构建特定训练周期,精确再现城市与郊区中的实际驾驶场景,显著提升了EMS在不同工况下的泛化性能. Li等[125 ] 采用多源数据训练LSTM车速预测模型,并通过车路云协同系统优化云端电池输出功率,为EMS提供动态环境反馈,使系统能够自适应地调整输出功率以应对多变的驾驶情境. Hu等[126 -127 ] 提出对抗学习方法,结合多模态数据与专家指导模型,进一步优化了策略在动态环境下的稳定性和智能性. 综上,利用多源行车信息进行数据扩充、协同优化与对抗训练,为基于DRL的EMS在真实驾驶场景中的泛化性提升提供了有力的技术支撑. ...
A transferable energy management strategy for hybrid electric vehicles via dueling deep deterministic policy gradient
1
2022
... EMS在面临驾驶周期切换或车辆构型变更情况时,常因环境的动态非平稳性而出现策略退化现象,须重新训练网络,从而产生了高昂的计算成本. 跨场景迁移技术[128 ] 利用行车信息的时空关联特征将源域策略快速适配于目标驾驶周期,并通过状态空间重构与动态奖励加权,缓解了数据分布偏移的问题. 跨构型迁移技术[129 ] 通过提取动力系统的通用特性来构建共享特征空间,以弱化对车型专属参数的依赖性,实现了异构平台之间的控制策略移植. 行车信息的多源性与动态性为迁移学习提供了数据驱动的迁移优化范式,为DRL-EMS的领域鸿沟问题的破解提供了理论框架与技术路径. 针对复杂路况的动态特性,将行车信息中的环境感知数据提取为显性迁移特征,并通过域对齐技术缩小源域与目标域的分布差异. Tan等[130 ] 在混合动力履带车辆中引入道路粗糙度作为共享特征,构建感知导向的迁移框架,有效提升了策略对不同越野路面的泛化性. 类似地,He等[131 ] 基于信息物理系统,以多状态交通信息、专家先验知识为介导,使混合动力巴士与丰田普锐斯的EMS在相同深度网络参数下实现了知识传递. 其他学者基于行车信息中的共性规律(如功率需求时序特征),研究如何通过强化学习框架封装可迁移的通用知识库. Huang等[132 ] 提出基于增强型TD3(enhanced TD3, E-TD3)的全知识传递方法,利用轻型HEV的驾驶数据预训练源策略,将动作空间、状态空间与奖励函数的全维度知识迁移至混合动力巴士,在随机交通环境中实现了EMS的快速微调. Huang等[133 ] 进一步通过增强型SAC算法捕获燃料电池车辆的能耗模式,将氢耗特性与交通预测信息耦合,完成从轻型燃料电池混合动力汽车到重型燃料电池混合动力公交车的跨功率等级迁移. 真实行车数据与迁移学习的结合可以弥合仿真模型与实车之间的鸿沟,降低了策略重新训练的成本. Chen等[134 ] 基于20组真实驾驶循环构建源域及目标域数据集,利用PPO算法提取驾驶工况的时序关联特征,使迁移后的策略在目标场景中的学习效率大幅提升. 上述研究表明,行车信息通过跨场景特征对齐与数据-算法协同优化机制,驱动局部经验向全局泛化有效迁移,为EMS的快速部署以及对动态环境的适应性提供了理论及技术基础. ...
Cross-type transfer for deep reinforcement learning based hybrid electric vehicle energy management
1
2020
... EMS在面临驾驶周期切换或车辆构型变更情况时,常因环境的动态非平稳性而出现策略退化现象,须重新训练网络,从而产生了高昂的计算成本. 跨场景迁移技术[128 ] 利用行车信息的时空关联特征将源域策略快速适配于目标驾驶周期,并通过状态空间重构与动态奖励加权,缓解了数据分布偏移的问题. 跨构型迁移技术[129 ] 通过提取动力系统的通用特性来构建共享特征空间,以弱化对车型专属参数的依赖性,实现了异构平台之间的控制策略移植. 行车信息的多源性与动态性为迁移学习提供了数据驱动的迁移优化范式,为DRL-EMS的领域鸿沟问题的破解提供了理论框架与技术路径. 针对复杂路况的动态特性,将行车信息中的环境感知数据提取为显性迁移特征,并通过域对齐技术缩小源域与目标域的分布差异. Tan等[130 ] 在混合动力履带车辆中引入道路粗糙度作为共享特征,构建感知导向的迁移框架,有效提升了策略对不同越野路面的泛化性. 类似地,He等[131 ] 基于信息物理系统,以多状态交通信息、专家先验知识为介导,使混合动力巴士与丰田普锐斯的EMS在相同深度网络参数下实现了知识传递. 其他学者基于行车信息中的共性规律(如功率需求时序特征),研究如何通过强化学习框架封装可迁移的通用知识库. Huang等[132 ] 提出基于增强型TD3(enhanced TD3, E-TD3)的全知识传递方法,利用轻型HEV的驾驶数据预训练源策略,将动作空间、状态空间与奖励函数的全维度知识迁移至混合动力巴士,在随机交通环境中实现了EMS的快速微调. Huang等[133 ] 进一步通过增强型SAC算法捕获燃料电池车辆的能耗模式,将氢耗特性与交通预测信息耦合,完成从轻型燃料电池混合动力汽车到重型燃料电池混合动力公交车的跨功率等级迁移. 真实行车数据与迁移学习的结合可以弥合仿真模型与实车之间的鸿沟,降低了策略重新训练的成本. Chen等[134 ] 基于20组真实驾驶循环构建源域及目标域数据集,利用PPO算法提取驾驶工况的时序关联特征,使迁移后的策略在目标场景中的学习效率大幅提升. 上述研究表明,行车信息通过跨场景特征对齐与数据-算法协同优化机制,驱动局部经验向全局泛化有效迁移,为EMS的快速部署以及对动态环境的适应性提供了理论及技术基础. ...
A transferable perception-guided EMS for series hybrid electric unmanned tracked vehicles
1
2024
... EMS在面临驾驶周期切换或车辆构型变更情况时,常因环境的动态非平稳性而出现策略退化现象,须重新训练网络,从而产生了高昂的计算成本. 跨场景迁移技术[128 ] 利用行车信息的时空关联特征将源域策略快速适配于目标驾驶周期,并通过状态空间重构与动态奖励加权,缓解了数据分布偏移的问题. 跨构型迁移技术[129 ] 通过提取动力系统的通用特性来构建共享特征空间,以弱化对车型专属参数的依赖性,实现了异构平台之间的控制策略移植. 行车信息的多源性与动态性为迁移学习提供了数据驱动的迁移优化范式,为DRL-EMS的领域鸿沟问题的破解提供了理论框架与技术路径. 针对复杂路况的动态特性,将行车信息中的环境感知数据提取为显性迁移特征,并通过域对齐技术缩小源域与目标域的分布差异. Tan等[130 ] 在混合动力履带车辆中引入道路粗糙度作为共享特征,构建感知导向的迁移框架,有效提升了策略对不同越野路面的泛化性. 类似地,He等[131 ] 基于信息物理系统,以多状态交通信息、专家先验知识为介导,使混合动力巴士与丰田普锐斯的EMS在相同深度网络参数下实现了知识传递. 其他学者基于行车信息中的共性规律(如功率需求时序特征),研究如何通过强化学习框架封装可迁移的通用知识库. Huang等[132 ] 提出基于增强型TD3(enhanced TD3, E-TD3)的全知识传递方法,利用轻型HEV的驾驶数据预训练源策略,将动作空间、状态空间与奖励函数的全维度知识迁移至混合动力巴士,在随机交通环境中实现了EMS的快速微调. Huang等[133 ] 进一步通过增强型SAC算法捕获燃料电池车辆的能耗模式,将氢耗特性与交通预测信息耦合,完成从轻型燃料电池混合动力汽车到重型燃料电池混合动力公交车的跨功率等级迁移. 真实行车数据与迁移学习的结合可以弥合仿真模型与实车之间的鸿沟,降低了策略重新训练的成本. Chen等[134 ] 基于20组真实驾驶循环构建源域及目标域数据集,利用PPO算法提取驾驶工况的时序关联特征,使迁移后的策略在目标场景中的学习效率大幅提升. 上述研究表明,行车信息通过跨场景特征对齐与数据-算法协同优化机制,驱动局部经验向全局泛化有效迁移,为EMS的快速部署以及对动态环境的适应性提供了理论及技术基础. ...
An improved energy management strategy for hybrid electric vehicles integrating multistates of vehicle-traffic information
1
2021
... EMS在面临驾驶周期切换或车辆构型变更情况时,常因环境的动态非平稳性而出现策略退化现象,须重新训练网络,从而产生了高昂的计算成本. 跨场景迁移技术[128 ] 利用行车信息的时空关联特征将源域策略快速适配于目标驾驶周期,并通过状态空间重构与动态奖励加权,缓解了数据分布偏移的问题. 跨构型迁移技术[129 ] 通过提取动力系统的通用特性来构建共享特征空间,以弱化对车型专属参数的依赖性,实现了异构平台之间的控制策略移植. 行车信息的多源性与动态性为迁移学习提供了数据驱动的迁移优化范式,为DRL-EMS的领域鸿沟问题的破解提供了理论框架与技术路径. 针对复杂路况的动态特性,将行车信息中的环境感知数据提取为显性迁移特征,并通过域对齐技术缩小源域与目标域的分布差异. Tan等[130 ] 在混合动力履带车辆中引入道路粗糙度作为共享特征,构建感知导向的迁移框架,有效提升了策略对不同越野路面的泛化性. 类似地,He等[131 ] 基于信息物理系统,以多状态交通信息、专家先验知识为介导,使混合动力巴士与丰田普锐斯的EMS在相同深度网络参数下实现了知识传递. 其他学者基于行车信息中的共性规律(如功率需求时序特征),研究如何通过强化学习框架封装可迁移的通用知识库. Huang等[132 ] 提出基于增强型TD3(enhanced TD3, E-TD3)的全知识传递方法,利用轻型HEV的驾驶数据预训练源策略,将动作空间、状态空间与奖励函数的全维度知识迁移至混合动力巴士,在随机交通环境中实现了EMS的快速微调. Huang等[133 ] 进一步通过增强型SAC算法捕获燃料电池车辆的能耗模式,将氢耗特性与交通预测信息耦合,完成从轻型燃料电池混合动力汽车到重型燃料电池混合动力公交车的跨功率等级迁移. 真实行车数据与迁移学习的结合可以弥合仿真模型与实车之间的鸿沟,降低了策略重新训练的成本. Chen等[134 ] 基于20组真实驾驶循环构建源域及目标域数据集,利用PPO算法提取驾驶工况的时序关联特征,使迁移后的策略在目标场景中的学习效率大幅提升. 上述研究表明,行车信息通过跨场景特征对齐与数据-算法协同优化机制,驱动局部经验向全局泛化有效迁移,为EMS的快速部署以及对动态环境的适应性提供了理论及技术基础. ...
Enabling cross-type full-knowledge transferable energy management for hybrid electric vehicles via deep transfer reinforcement learning
1
2024
... EMS在面临驾驶周期切换或车辆构型变更情况时,常因环境的动态非平稳性而出现策略退化现象,须重新训练网络,从而产生了高昂的计算成本. 跨场景迁移技术[128 ] 利用行车信息的时空关联特征将源域策略快速适配于目标驾驶周期,并通过状态空间重构与动态奖励加权,缓解了数据分布偏移的问题. 跨构型迁移技术[129 ] 通过提取动力系统的通用特性来构建共享特征空间,以弱化对车型专属参数的依赖性,实现了异构平台之间的控制策略移植. 行车信息的多源性与动态性为迁移学习提供了数据驱动的迁移优化范式,为DRL-EMS的领域鸿沟问题的破解提供了理论框架与技术路径. 针对复杂路况的动态特性,将行车信息中的环境感知数据提取为显性迁移特征,并通过域对齐技术缩小源域与目标域的分布差异. Tan等[130 ] 在混合动力履带车辆中引入道路粗糙度作为共享特征,构建感知导向的迁移框架,有效提升了策略对不同越野路面的泛化性. 类似地,He等[131 ] 基于信息物理系统,以多状态交通信息、专家先验知识为介导,使混合动力巴士与丰田普锐斯的EMS在相同深度网络参数下实现了知识传递. 其他学者基于行车信息中的共性规律(如功率需求时序特征),研究如何通过强化学习框架封装可迁移的通用知识库. Huang等[132 ] 提出基于增强型TD3(enhanced TD3, E-TD3)的全知识传递方法,利用轻型HEV的驾驶数据预训练源策略,将动作空间、状态空间与奖励函数的全维度知识迁移至混合动力巴士,在随机交通环境中实现了EMS的快速微调. Huang等[133 ] 进一步通过增强型SAC算法捕获燃料电池车辆的能耗模式,将氢耗特性与交通预测信息耦合,完成从轻型燃料电池混合动力汽车到重型燃料电池混合动力公交车的跨功率等级迁移. 真实行车数据与迁移学习的结合可以弥合仿真模型与实车之间的鸿沟,降低了策略重新训练的成本. Chen等[134 ] 基于20组真实驾驶循环构建源域及目标域数据集,利用PPO算法提取驾驶工况的时序关联特征,使迁移后的策略在目标场景中的学习效率大幅提升. 上述研究表明,行车信息通过跨场景特征对齐与数据-算法协同优化机制,驱动局部经验向全局泛化有效迁移,为EMS的快速部署以及对动态环境的适应性提供了理论及技术基础. ...
Towards a fossil-free urban transport system: an intelligent cross-type transferable energy management framework based on deep transfer reinforcement learning
1
2024
... EMS在面临驾驶周期切换或车辆构型变更情况时,常因环境的动态非平稳性而出现策略退化现象,须重新训练网络,从而产生了高昂的计算成本. 跨场景迁移技术[128 ] 利用行车信息的时空关联特征将源域策略快速适配于目标驾驶周期,并通过状态空间重构与动态奖励加权,缓解了数据分布偏移的问题. 跨构型迁移技术[129 ] 通过提取动力系统的通用特性来构建共享特征空间,以弱化对车型专属参数的依赖性,实现了异构平台之间的控制策略移植. 行车信息的多源性与动态性为迁移学习提供了数据驱动的迁移优化范式,为DRL-EMS的领域鸿沟问题的破解提供了理论框架与技术路径. 针对复杂路况的动态特性,将行车信息中的环境感知数据提取为显性迁移特征,并通过域对齐技术缩小源域与目标域的分布差异. Tan等[130 ] 在混合动力履带车辆中引入道路粗糙度作为共享特征,构建感知导向的迁移框架,有效提升了策略对不同越野路面的泛化性. 类似地,He等[131 ] 基于信息物理系统,以多状态交通信息、专家先验知识为介导,使混合动力巴士与丰田普锐斯的EMS在相同深度网络参数下实现了知识传递. 其他学者基于行车信息中的共性规律(如功率需求时序特征),研究如何通过强化学习框架封装可迁移的通用知识库. Huang等[132 ] 提出基于增强型TD3(enhanced TD3, E-TD3)的全知识传递方法,利用轻型HEV的驾驶数据预训练源策略,将动作空间、状态空间与奖励函数的全维度知识迁移至混合动力巴士,在随机交通环境中实现了EMS的快速微调. Huang等[133 ] 进一步通过增强型SAC算法捕获燃料电池车辆的能耗模式,将氢耗特性与交通预测信息耦合,完成从轻型燃料电池混合动力汽车到重型燃料电池混合动力公交车的跨功率等级迁移. 真实行车数据与迁移学习的结合可以弥合仿真模型与实车之间的鸿沟,降低了策略重新训练的成本. Chen等[134 ] 基于20组真实驾驶循环构建源域及目标域数据集,利用PPO算法提取驾驶工况的时序关联特征,使迁移后的策略在目标场景中的学习效率大幅提升. 上述研究表明,行车信息通过跨场景特征对齐与数据-算法协同优化机制,驱动局部经验向全局泛化有效迁移,为EMS的快速部署以及对动态环境的适应性提供了理论及技术基础. ...
Data-driven transferred energy management strategy for hybrid electric vehicles via deep reinforcement learning
1
2023
... EMS在面临驾驶周期切换或车辆构型变更情况时,常因环境的动态非平稳性而出现策略退化现象,须重新训练网络,从而产生了高昂的计算成本. 跨场景迁移技术[128 ] 利用行车信息的时空关联特征将源域策略快速适配于目标驾驶周期,并通过状态空间重构与动态奖励加权,缓解了数据分布偏移的问题. 跨构型迁移技术[129 ] 通过提取动力系统的通用特性来构建共享特征空间,以弱化对车型专属参数的依赖性,实现了异构平台之间的控制策略移植. 行车信息的多源性与动态性为迁移学习提供了数据驱动的迁移优化范式,为DRL-EMS的领域鸿沟问题的破解提供了理论框架与技术路径. 针对复杂路况的动态特性,将行车信息中的环境感知数据提取为显性迁移特征,并通过域对齐技术缩小源域与目标域的分布差异. Tan等[130 ] 在混合动力履带车辆中引入道路粗糙度作为共享特征,构建感知导向的迁移框架,有效提升了策略对不同越野路面的泛化性. 类似地,He等[131 ] 基于信息物理系统,以多状态交通信息、专家先验知识为介导,使混合动力巴士与丰田普锐斯的EMS在相同深度网络参数下实现了知识传递. 其他学者基于行车信息中的共性规律(如功率需求时序特征),研究如何通过强化学习框架封装可迁移的通用知识库. Huang等[132 ] 提出基于增强型TD3(enhanced TD3, E-TD3)的全知识传递方法,利用轻型HEV的驾驶数据预训练源策略,将动作空间、状态空间与奖励函数的全维度知识迁移至混合动力巴士,在随机交通环境中实现了EMS的快速微调. Huang等[133 ] 进一步通过增强型SAC算法捕获燃料电池车辆的能耗模式,将氢耗特性与交通预测信息耦合,完成从轻型燃料电池混合动力汽车到重型燃料电池混合动力公交车的跨功率等级迁移. 真实行车数据与迁移学习的结合可以弥合仿真模型与实车之间的鸿沟,降低了策略重新训练的成本. Chen等[134 ] 基于20组真实驾驶循环构建源域及目标域数据集,利用PPO算法提取驾驶工况的时序关联特征,使迁移后的策略在目标场景中的学习效率大幅提升. 上述研究表明,行车信息通过跨场景特征对齐与数据-算法协同优化机制,驱动局部经验向全局泛化有效迁移,为EMS的快速部署以及对动态环境的适应性提供了理论及技术基础. ...
Distributed cooperative energy management system of connected hybrid electric vehicles with personalized non-stationary inference
1
2022
... 针对上述挑战,新兴技术路径可以从以下方面进行探索:1)分布式协同架构[135 ] 通过车云算力协同与边缘计算优化,在保证决策精度的同时降低了车载平台的计算负载,但是仍须进一步解决通信时延、数据丢包等动态扰动对控制稳定性的影响;2)构建物理模型与数据驱动的混合优化框架,将能量流动特性等先验知识嵌入DRL算法设计,在提升策略鲁棒性的同时实现控制逻辑透明化;3)利用驾驶世界大模型[136 ] ,通过高保真交通场景合成与虚拟数据增强,构建离线仿真环境以生成多模态行车信息,突破真实驾驶数据稀缺的瓶颈. ...
1
... 针对上述挑战,新兴技术路径可以从以下方面进行探索:1)分布式协同架构[135 ] 通过车云算力协同与边缘计算优化,在保证决策精度的同时降低了车载平台的计算负载,但是仍须进一步解决通信时延、数据丢包等动态扰动对控制稳定性的影响;2)构建物理模型与数据驱动的混合优化框架,将能量流动特性等先验知识嵌入DRL算法设计,在提升策略鲁棒性的同时实现控制逻辑透明化;3)利用驾驶世界大模型[136 ] ,通过高保真交通场景合成与虚拟数据增强,构建离线仿真环境以生成多模态行车信息,突破真实驾驶数据稀缺的瓶颈. ...


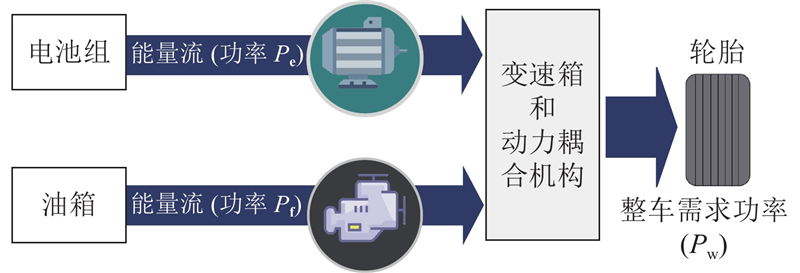
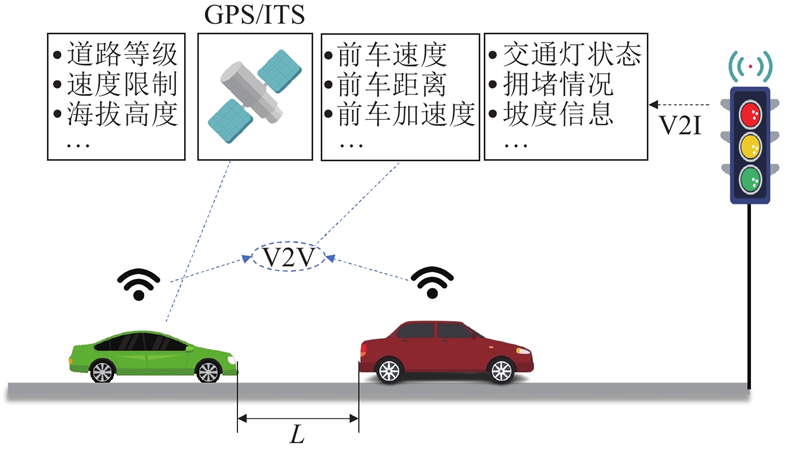

{kind=link}
{kind=link}
{kind=link}
{kind=link}