

近年来,无人机技术在民用领域的应用日益广泛[1],展现出巨大的潜力与应用前景. 三旋翼无人机作为一种特殊构型的多旋翼无人机,其执行机构由3个旋翼和1个尾部舵机构成,这种独特的执行机构耦合特性在提高无人机灵活性的同时,也使其飞行控制面临双重技术挑战. 一方面,飞行过程中尾部舵机须执行高频偏转指令,易引发机械疲劳,进而导致舵机发生故障;另一方面,舵机故障会破坏系统动态平衡,在外部扰动影响下,可能诱发飞行失稳甚至坠毁事故. 面对三旋翼无人机在执行任务时突发舵机故障的问题,设计一种能有效应对故障,确保飞行稳定的容错控制策略显得尤为重要.
现阶段,针对三旋翼无人机的控制研究已经取得了一定的成果,主要集中在2方面:一是应对未知外部扰动、建模不确定性的控制策略,二是应对执行机构故障的容错控制方法. 在三旋翼无人机外部扰动和建模不确定性方面,Gu等[2]设计了基于数据驱动策略的无模型自适应控制器,在飞行实验平台上验证了控制器的有效性. Xie等[3]采用Actor-Critic神经网络补偿建模不确定性,并设计基于滑模的固定时间控制器实现系统收敛. Xie等[4]引入扰动观测器来估计外部扰动,设计非奇异终端滑模和改进滑模控制的内外环控制结构,通过实验验证了控制策略的有效性. Raza等[5]设计了基于滑模的轨迹跟踪控制器实现系统的稳定跟踪. 王征宇等[6]通过引入超螺旋滑模控制,解决了转动惯量未知和外部扰动的问题,并通过三旋翼无人机实验平台进行了实验验证.
综上所述,针对三旋翼无人机的控制研究取得了一定进展,但同时考虑外部扰动和舵机故障的情况较为有限. 常规滑模控制虽广泛应用于无人机控制系统[10-11],但其高频抖振特性限制了在复杂系统中的应用. 超螺旋滑模控制因其鲁棒性、有限时间收敛和抑制系统抖振的特性[12],可有效抑制扰动或故障引起的系统突发性改变,受到国内外学者的广泛关注. Castillo等[13]针对扰动和控制系数均与时间和状态相关,且控制系数存在不确定性的问题,提出广义超螺旋滑模算法. Moreno等[14]提出多变量广义超螺旋滑模算法,以解决扰动和控制矩阵都依赖于时间和系统状态的系统控制问题. 文献[15-17]分别验证了超螺旋算法在多个应用场景中高精度和高抗扰控制的潜力.
本研究提出基于自适应增益的超螺旋滑模抗扰容错控制策略,主要创新点如下:1)针对三旋翼无人机发生舵机卡死故障时控制分配矩阵未知的问题,采用自适应算法实现控制分配矩阵在线估计;2)超螺旋滑模算法通过设计控制器增益自适应调节抑制未知外部扰动、建模不确定性和突发舵机卡死故障对系统稳定性的影响;3)通过无人机飞控半实物实验平台,将本研究方法与超螺旋算法进行对比,以验证所提控制策略的容错性能.
1. 三旋翼无人机姿态系统故障模型
1.1. 三旋翼无人机姿态系统模型
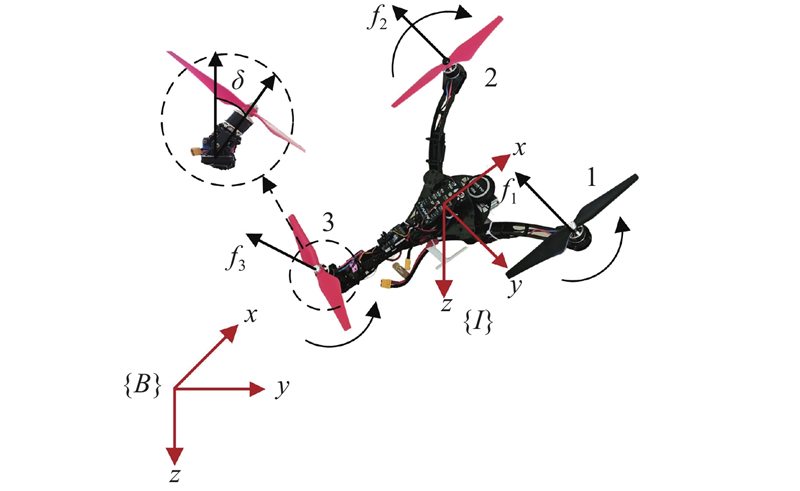
为了描述三旋翼无人机运动机理,基于右手定则,分别建立惯性坐标系
图 1
根据欧拉方程[18],得到惯性坐标系下三旋翼无人机姿态系统模型:
式中:
将式(1)改写成
式中:
假设1[19]
式中:
三旋翼无人机力矩和力的关系可以表示为
式中:
式中:
1.2. 舵机故障模型
三旋翼无人机发生舵机卡死故障时,舵机角度未知,为了便于控制器设计,定义辅助变量
将式(5)、(7)与(8)代入式(3),可得
式中:
2. 抗扰容错控制器设计
2.1. 控制器设计
定义姿态误差向量
式中:
设计滑模面
式中:
当三旋翼无人机发生舵机卡死故障时,控制分配矩阵
估计误差矩阵为
设计抗扰容错控制器
式中:
将式(15)、(16)代入式(13)中,可得
定义
对式(18)求导,并考虑到
整理可得
式中:
2.2. 自适应律设计
设计
式中:
为了保证
式中:条件1如下:1)
为了确保
设计扰动估计值
式中:
设计控制器增益
式中:
3. 稳定性分析
定理1 针对三旋翼无人机姿态系统故障模型(式(2)、(9)),设计控制输入(式(16))和自适应律(式(23)、(24)、(28)~(30)),可使姿态系统在有限时间内收敛.
证明 定义Lyapunov候选函数为
式中:
对式(32)求导,可得
其中,
对式(15)求导,并将式(23)、(24)、(28)代入式(34),整理得到
当满足式(31)时,矩阵
式中:
由不等式
式中:
针对
1)当
此时系统将在有限时间内收敛,收敛时间为
2)当
式中:
当
4. 实验验证
4.1. 实验平台及参数设定
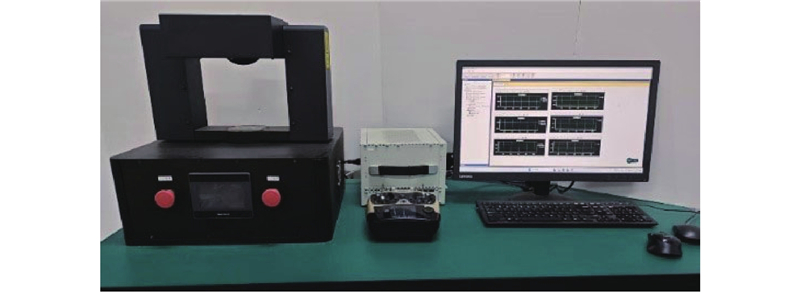
采用如图2所示的无人机飞控半实物实验平台对所设计控制器的有效性进行验证. 平台由实时仿真机、地面站系统、三轴转台、遥控器和飞控板组成. 三旋翼无人机系统参数和控制器参数设置如下.
图 2
初始姿态角
式中:
4.2. 实验验证
采用上述设定的参数进行实验. 同时,为了更好地验证所设计控制器的控制效果,在相同条件下,根据参考文献[6],设计基于超螺旋算法的控制器(STA)进行对比,具体形式如下:
式中:
图 3
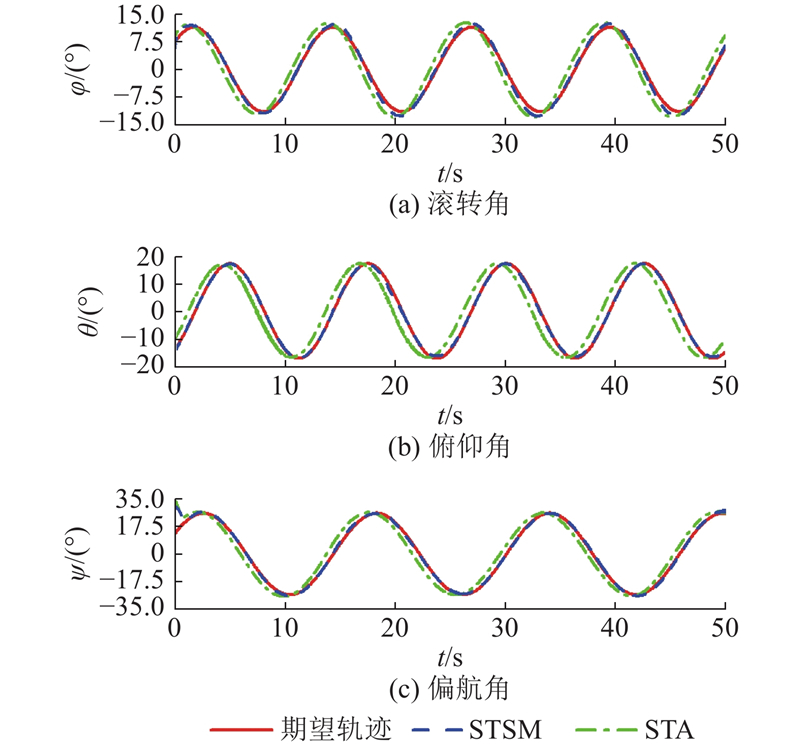
图 4
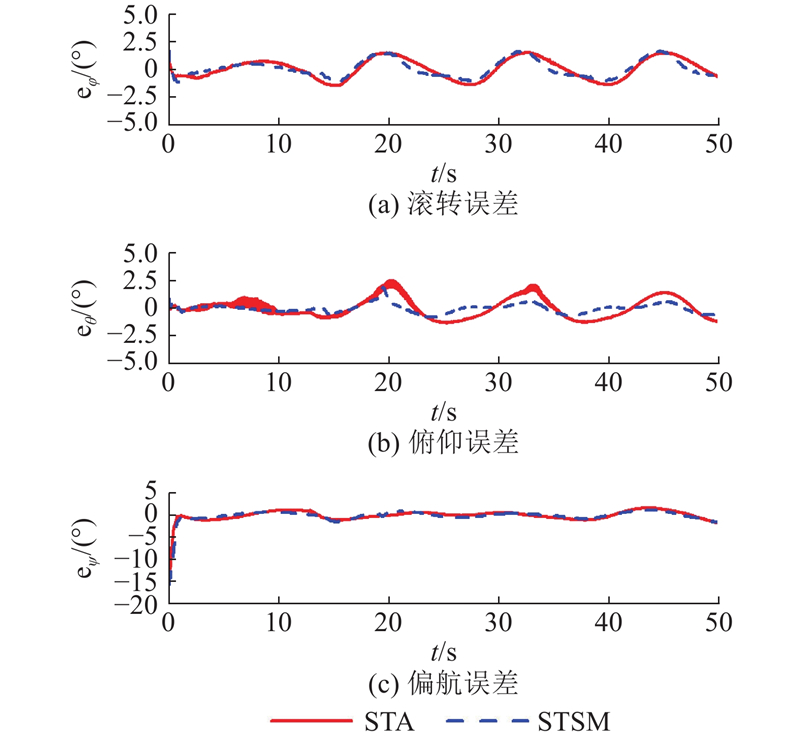
图 5
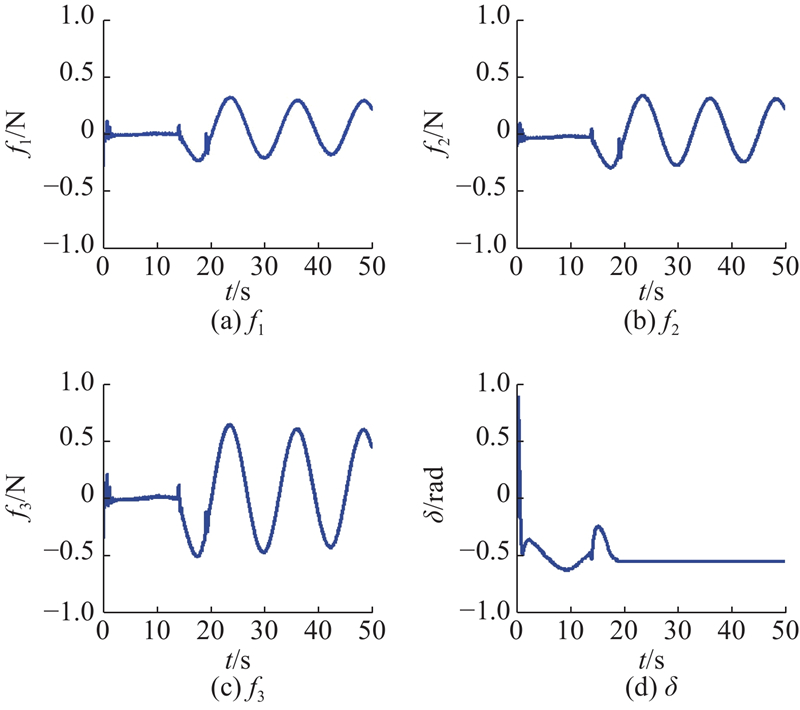
图 6
图 7
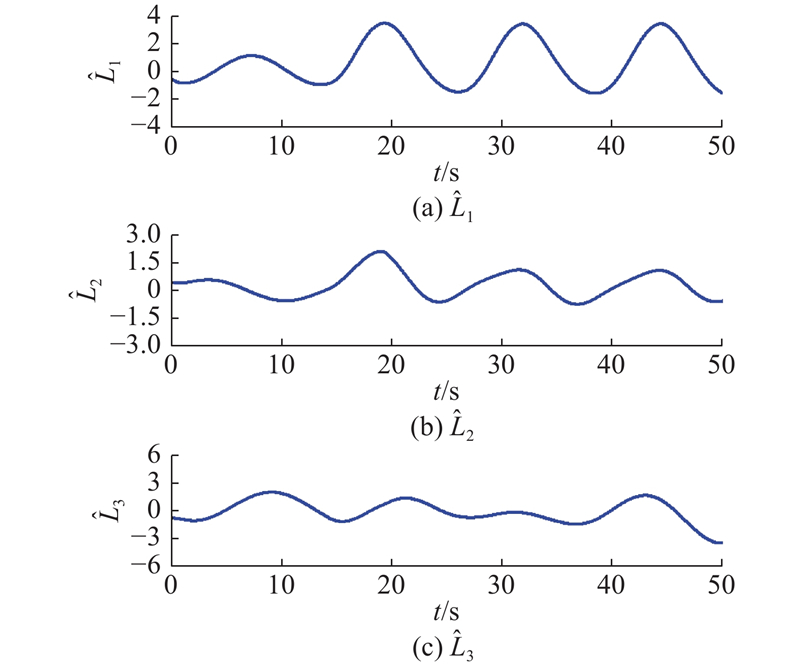
图 7 三旋翼无人机扰动自适应估计曲线
Fig.7 Adaptive disturbance estimation curves of tri-rotor UAV
如图3、4分别表示姿态角和姿态角误差变化曲线. 可以看出,在扰动发生前,姿态角跟踪误差保持在较小的水平,在第14 s扰动发生后,误差出现变化,STSM算法能够在0.2 s内实现稳定跟踪,而STA算法需要0.3 s. 在第19 s故障发生后,滚转和偏航通道的误差出现明显变化,STSM算法能使滚转角、俯仰角和偏航角分别稳定在
如图5所示展示了三旋翼无人机控制输入. 在发生扰动之后,控制输入
为了定量比较STSM相比于STA的优势,分析其发生舵机卡死故障后31 s内的误差,具体结果如表1所示. 可以看到,偏航通道上两者的平均绝对误差和均方差相近,但在滚转和俯仰通道上STSM误差均值更低,且其平均绝对误差和均方差均全面优于STA的,这表示STSM的误差波动更小,鲁棒性更强,能有效抑制扰动并提升系统稳定性.
表 1 三旋翼无人机姿态控制误差对比
Tab.1
| 姿态 | 控制器 | 均值 | 平均绝对误差 | 均方差 |
| 滚转 | STSM | |||
| STA | ||||
| 俯仰 | STSM | − | ||
| STA | ||||
| 偏航 | STSM | − | ||
| STA |
5. 结 语
针对三旋翼无人机发生舵机卡死故障的姿态控制问题,同时考虑未知外部扰动,建立三旋翼无人机姿态系统故障模型. 为了解决舵机故障下控制分配矩阵未知的问题,并补偿外部扰动和突发故障对系统的影响,同时考虑建模不确定性,融合自适应和超螺旋滑模控制设计抗扰容错控制策略. 基于Lyapunov稳定性理论,证明了闭环系统有限时间收敛. 最后,通过无人机飞控半实物实验平台进行实验验证,并与超螺旋算法进行比较,验证了控制策略在发生外部扰动和舵机卡死故障时的鲁棒性. 目前,本研究主要关注舵机卡死故障下的三旋翼无人机姿态控制研究,尚未涉及其旋翼故障下的容错控制问题. 未来将进一步开展三旋翼无人机执行器失效下的位置与姿态容错控制问题研究.
参考文献
带爪无人机自主控制技术新进展
[J].
New progresses in autonomous control technology for UAV with manipulator
[J].
Model free adaptive control design for a tilt trirotor unmanned aerial vehicle with quaternion feedback: theory and implementation
[J].DOI:10.1002/acs.3344 [本文引用: 1]
Fixed-time convergence attitude control for a tilt trirotor unmanned aerial vehicle based on reinforcement learning
[J].DOI:10.1016/j.isatra.2022.06.006 [本文引用: 1]
Disturbance observer-based fixed-time tracking control for a tilt trirotor unmanned aerial vehicle
[J].DOI:10.1109/TIE.2023.3277090 [本文引用: 1]
Sliding mode control-based autonomous control of a tri-rotor unmanned aerial vehicle
[J].DOI:10.1142/S2737480721500138 [本文引用: 1]
倾转式三旋翼无人机的有限时间收敛控制设计
[J].DOI:10.7641/CTA.2018.80034 [本文引用: 2]
Finite time convergence control design of the tilt tri-rotor unmanned aerial vehicle
[J].DOI:10.7641/CTA.2018.80034 [本文引用: 2]
倾转式三旋翼无人机的自适应鲁棒容错控制
[J].DOI:10.7641/CTA.2019.90172 [本文引用: 1]
Adaptive robust fault tolerant control of the tilt tri-rotor unmanned aerial vehicle
[J].DOI:10.7641/CTA.2019.90172 [本文引用: 1]
Nonlinear robust fault-tolerant tracking control of a tri-rotor UAV against actuator’s abnormal behavior
[J].DOI:10.3390/act12040140 [本文引用: 2]
基于两级卡尔曼滤波器的三旋翼无人机执行器异常行为诊断
[J].DOI:10.3969/j.issn.1671-637X.2024.02.016 [本文引用: 2]
Abnormal behavior diagnosis of tri-rotor UAV’s actuator based on two-stage Kalman filter
[J].DOI:10.3969/j.issn.1671-637X.2024.02.016 [本文引用: 2]
基于扩张状态观测器的四旋翼无人机快速非奇异终端滑模轨迹跟踪控制
[J].DOI:10.13195/j.kzyjc.2021.1819 [本文引用: 1]
Fast nonsingular terminal sliding mode trajectory tracking control of a quadrotor UAV based on extended state observers
[J].DOI:10.13195/j.kzyjc.2021.1819 [本文引用: 1]
Control schemes for quadrotor UAV: taxonomy and survey
[J].
A novel adaptive-gain supertwisting sliding mode controller: methodology and application
[J].DOI:10.1016/j.automatica.2012.02.024 [本文引用: 1]
Super-Twisting Algorithm in presence of time and state dependent perturbations
[J].DOI:10.1080/00207179.2016.1269952 [本文引用: 1]
Multivariable super-twisting algorithm for systems with uncertain input matrix and perturbations
[J].DOI:10.1109/TAC.2021.3130880 [本文引用: 1]
Adaptive multi-input super twisting control for a quadrotor: singular perturbation approach
[J].DOI:10.1109/TIE.2023.3281686 [本文引用: 1]
Finite-time adaptive super-twisting sliding mode control for autonomous robotic manipulators with actuator faults
[J].DOI:10.1016/j.isatra.2023.10.028
Adaptive multivariable super-twisting-based Lyapunov redesign for RLV attitude control
[J].DOI:10.1109/TSMC.2024.3355398 [本文引用: 1]
Optimized intelligent tracking control for a quadrotor unmanned aerial vehicle with actuator failures
[J].DOI:10.1016/j.ast.2023.108803 [本文引用: 1]
Adaptive nonsingular fast terminal sliding-mode control for the tracking problem of uncertain dynamical systems
[J].DOI:10.1016/j.isatra.2018.04.007 [本文引用: 1]
A sufficiently smooth projection operator
[J].DOI:10.1109/TAC.2005.861704 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}