

在电动汽车中,制动系统须兼顾制动安全与能量回收. 其中,电液复合制动系统通过集成液压制动与电机制动,实现了多种制动模式的协同工作,在保障制动安全与稳定性的同时提升能量回收效率. 由于电机与液压系统响应特性的差异,制动模式切换时易产生制动力突变,引发制动冲击,尤其在城市工况下更明显[7]. 国内外学者开展了大量研究. 徐军等[8]采用逻辑门限值与PID控制相结合的控制算法,有效抑制了制动模式切换过程中的制动力矩波动,提升了汽车的制动稳定性与舒适性. 在摩擦-电磁耦合制动系统的研究中,刘志强等[9]基于混杂理论提出动态协调控制算法,实现制动模式切换过程中的系统平稳过渡. Liu等[10- 11]研究制动冲击与能量回收的耦合效应,采用多目标布谷鸟搜索算法实现切换控制与能量回收的协同优化,通过试验验证了该算法的有效性. 张向文等[12]提出将模糊PID与模型预测控制(MPC)结合的电液协调控制策略,通过海鸥优化算法调整权重,减小了电机与液压制动的响应差异,降低了切换冲击. 这些方法主要集中于控制策略的优化设计,对电机制动能力的边界条件缺乏系统分析. 刘平等[13]通过预留电机制动力并引入冲击度限制,有效抑制了制动冲击,但未考虑电机特性和电池充电功率对制动过程的影响,且在紧急制动工况下的适应性仍存在不足.
综上所述,现有研究多依赖电机补偿控制以减小制动模式的切换冲击,但未充分考虑电机制动上限及电机与液压系统的动态响应差异. 当电机制动力不足以完全补偿液压滞后时,如何协调两者的制动力分配仍是亟待解决的问题. 本文提出基于双非线性模型预测控制(NMPC)的制动模式切换策略,综合考虑电机与液压制动系统的动态响应特性. 该策略通过一阶惯性环节分别建模电机与液压制动系统的响应特性,引入电机补偿控制以消除两者间的响应差异,结合判断模块对电机制动力矩进行约束,从而合理地限制电机的补偿范围. 采用双NMPC分别对电机与液压制动系统进行调节,减小制动模式切换过程中的冲击,提升制动舒适性. 通过台架实验,验证了该模式切换策略的有效性.
1. 电液复合制动系统模型的构建
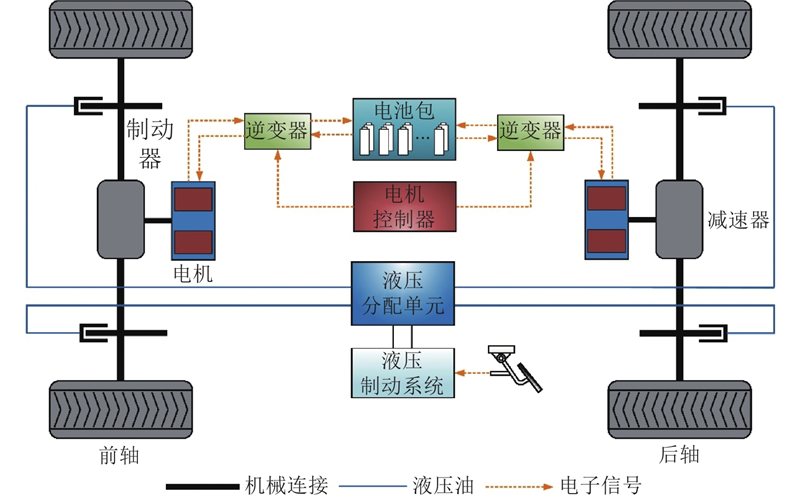
研究的双轴驱动电动汽车采用如图1所示的电液复合制动系统. 该系统由液压制动系统和电机制动系统共同构成,可以分别独立工作或协同工作. 在车辆制动时,液压制动系统通过分配制动压力至各车轮,实现液压制动. 电机制动通过电机反转产生反向力矩实现制动,该过程中产生的电能被回收至蓄电池.
图 1
1.1. 电机模型
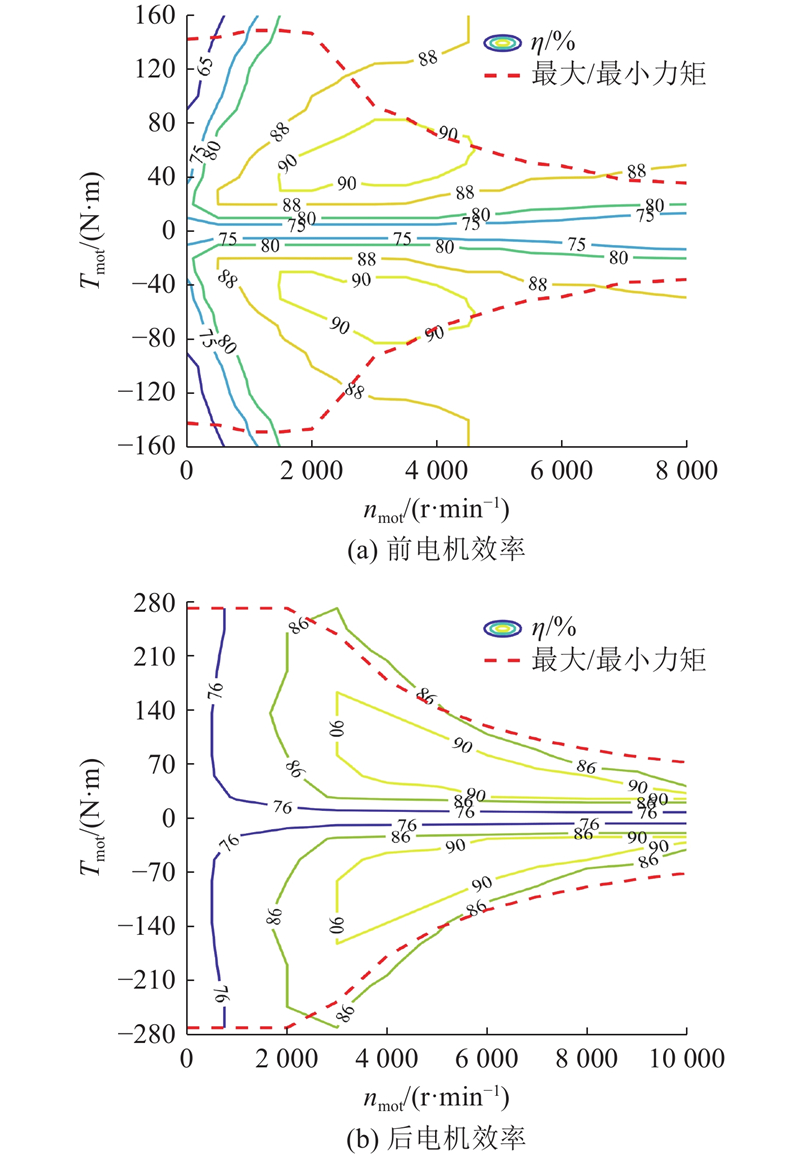
在双轴驱动电动汽车中,前后电机均采用三相永磁同步电机(PMSM)作为核心部件,具备驱动和制动2种工作模式. 前电机的额定转矩、转速及功率分别为
图 2
式中:
1.2. 电池模型
为了实现高效的能量回收控制策略,电池作为能量存储装置,电池模型的准确性至关重要. 采用如图3所示的等效内阻模型,该模型不仅能够准确地反映电池的实际工作特性,还能够有效地简化模型结构,提高计算效率.
图 3
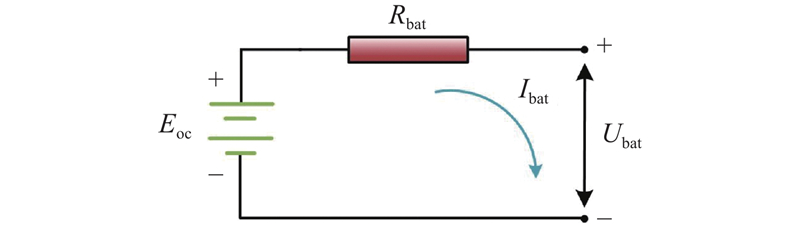
通过建立的电池内阻模型,可以计算电池外部负载Ubat、电池功率Pbat及电池电流Ibat,定义如下:
式中:
电池的荷电状态(
式中:
1.3. 最大再生制动力矩约束
根据建立的模型可知,电机制动力矩受电机工作特性和电池充电功率的限制. 其中,由于电机工作特性的影响,电机可提供的最大再生制动力矩为
式中:
在电池充电功率的约束下,可提供的最大再生制动力矩为
式中:
电机的最大再生制动力矩选取
1.4. 液压制动系统模型
制动轮缸对应增压、保压和降压3种工作模式[17],轮缸压力的变化公式定义如下:
式中:
此外,通过轮缸压力的计算,可得液压制动力矩,具体表示为
式中:
2. 制动力矩分配控制策略
图 4
当
式中:
当
当
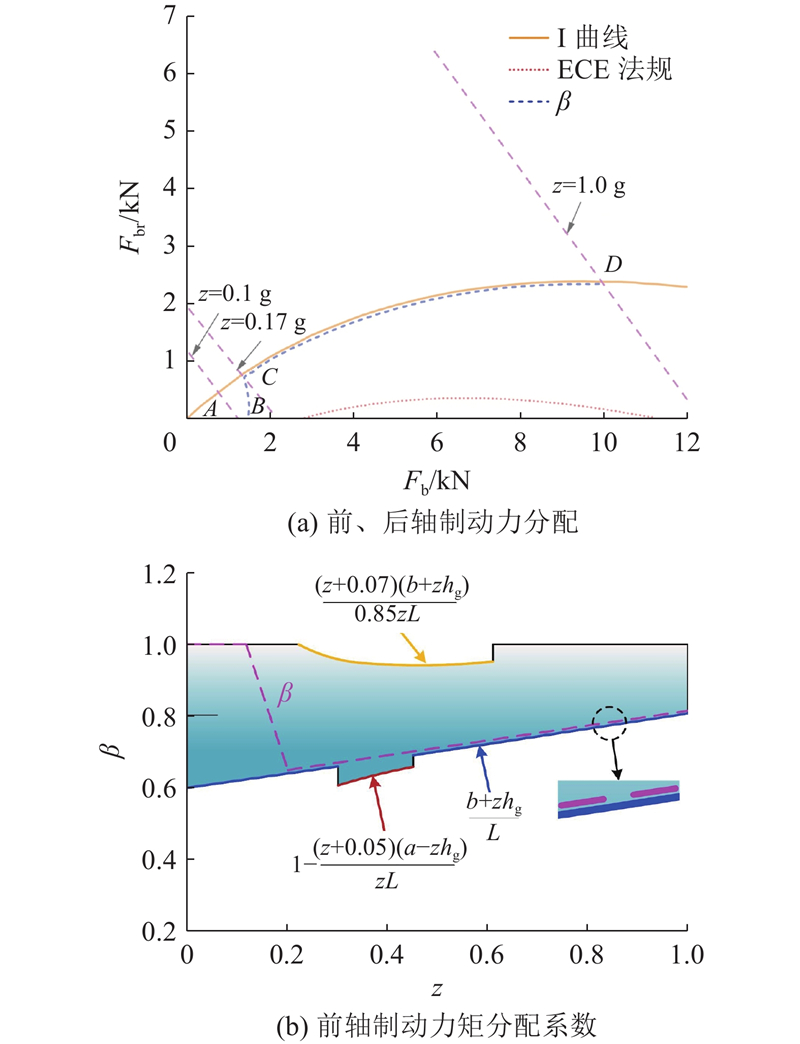
从图4可以看出,随着制动强度的增加,制动力逐渐接近I曲线. 在大制动情况下,该制动力分配策略有助于提升车辆的制动稳定性.
从图4(b)可知,前轴制动力矩分配系数β满足ECE R13制动法规的要求,稳定维持在阴影部分标示的规定范围内. 制动力矩分配系数及制动法规要求的具体公式为
式中:Tf、Tr分别为前、后轴制动力矩.
式中:L为轴距,a和b分别为车辆质心至前轴和后轴的水平距离,hg为重心高度.
3. 模式切换策略的设计
如图5所示,设计电液复合制动系统模式切换策略,包含电机制动力矩补偿、判别模块、电液制动系统动态响应特性及双NMPC 4个部分,具体如下.
图 5
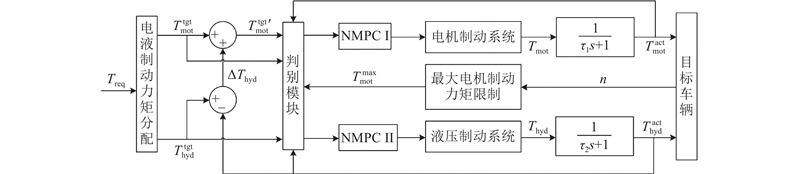
图 5 电液复合制动系统的模式切换策略
Fig.5 Mode switching strategy of electro-hydraulic composite braking system
1)电机制动力矩补偿. 考虑到电机制动系统具有快速响应的特点,可以通过电机制动力矩补偿控制,增大电机制动力矩
2)判别模块. 在电机制动力矩补偿方面,大多仅借助电机快速响应来抑制液压迟滞引起的制动冲击,通常直接将ΔThyd引入修正后的电机制动力矩
图 6
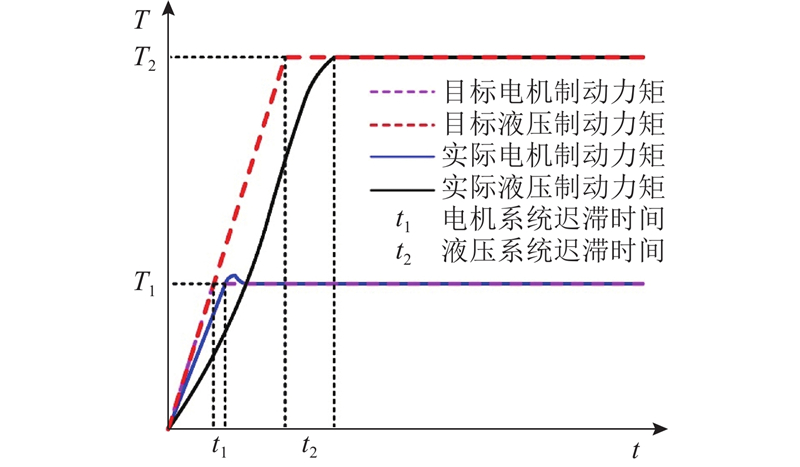
图 6 电机制动与液压制动系统的动态特性差异
Fig.6 Dynamic response difference between motor braking and hydraulic braking system
式中:τ1和τ2分别为电机和液压制动系统一阶惯性模型的时间常数,
4)双NMPC方案设计. 与传统的PID和LQR控制算法相比,MPC能够较好地处理电液复合制动系统的动态特性. 由于电液复合制动系统具有较强的非线性特征,MPC在精确控制时可能受到一定的限制. NMPC作为MPC的扩展,能够更好地处理非线性系统的复杂变化,提供更精确和灵活的控制性能. 在电液复合制动系统中引入双NMPC结构,分别对电机与液压制动系统实施独立优化控制,在约束条件中综合考虑最大电机制动力矩的限制. 在该系统中,d-q轴电流和pw作为状态变量,d-q轴电压与pm分别作为NMPC I和NMPC II系统的输入变量umot和uhyd,电机与液压制动系统的实际制动力矩分别作为NMPC I和NMPC II系统的输出变量ymot(k+i|k)和yhyd(k+i|k). 综上所述,系统的状态变量、输入变量及输出变量可以表示为
则状态方程
采用欧拉方法对状态方程进行离散化,即
为了实现预期的目标制动力矩,减小跟踪误差并抑制制动冲击,设置代价函数:
代价函数满足如下约束条件:
式中:
表 1 NMPC的参数配置
Tab.1
| 参数 | 设置值 | 参数 | 设置值 | |
| Ts/ s | 0.01 | ymot/(N·m) | [0, 419] | |
| Np | 20 | yhyd/(N·m) | [0, | |
| Nc | 5 | umot/V | [0, 300] | |
| Q | diag [50, 30, 30] | uhyd/MPa | [0, 18] | |
| R | diag [2, 2, 1] | — | — |
NMPC的核心思想是基于滚动时域优化策略,在每个采样时刻会首先获取系统的当前状态信息,包括电机实际制动力矩、液压制动压力及对应的目标制动力矩. 随后,NMPC I与NMPC II分别基于电机和液压制动系统的非线性模型,对未来若干步的输出进行预测. 在输入输出约束条件下,控制器通过在线非线性优化计算最优控制序列,并仅执行该序列的首步控制量. 该过程在每个采样周期持续滚动进行,从而获得最优的控制输入,使得电机和液压制动系统的实际制动力矩尽可能逼近目标值.
4. 仿真与实验验证
4.1. 仿真验证
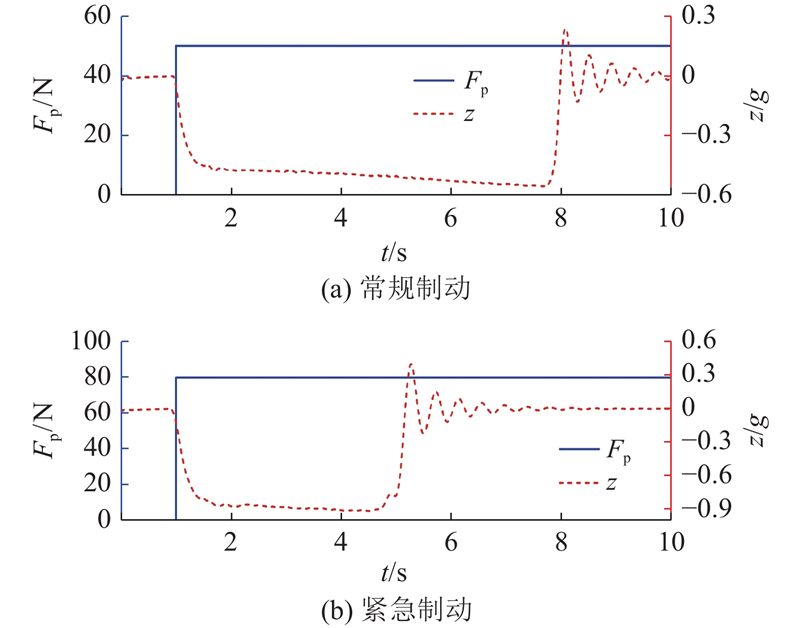
为了验证设计的电液复合制动系统模式切换策略的有效性,构建Carsim与Matlab/Simulink的联合仿真平台. 仿真工况设置如下:车辆在空载状态下以100 km/h的初始速度,分别在附着系数为0.85的干式沥青路面上进行常规制动与紧急制动. 驾驶员施加的制动踏板阶跃输入Fp及其对应的制动强度z如图7所示. 车辆的仿真参数设置如下:整车质量为
图 7
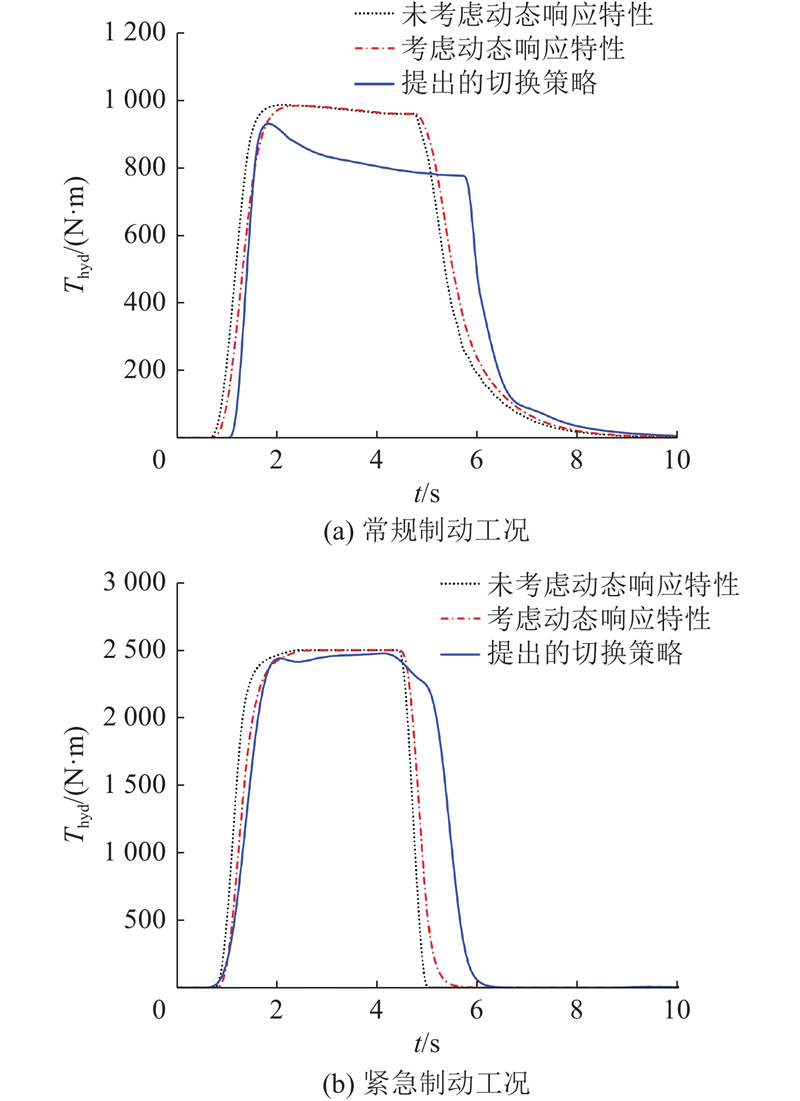
如图8所示,未考虑动态响应特性是指直接采用上层制动力矩分配策略计算Tmot,未涉及电机与液压制动系统之间的动态协调控制. 仅考虑动态响应特性是在此基础上进一步引入电机制动系统的动态响应特性进行修正,但仍未考虑电机制动能力上限以及电机与液压制动系统之间的协调控制. 由于电机制动系统的响应速度较快,即一阶惯性环节中的时间常数较小,采用未考虑动态响应特性与仅考虑动态响应特性的2种策略所得的电机制动力矩变化趋势基本一致. 从图8(a)、(b)可以看出,基于NMPC的电机制动系统结合了最大电机制动力矩限制与电机制动力矩补偿,体现了提出的控制策略的优势. 从图9可知,提出的切换控制策略使得液压制动力矩Thyd相比于未考虑或仅考虑液压制动系统动态响应的情况有所减小. 这是因为电机制动力矩的补偿目标有效减小了实际液压制动力矩与预期之间的差异,从而抑制了制动力矩的中断,避免了较大的制动冲击.
图 8
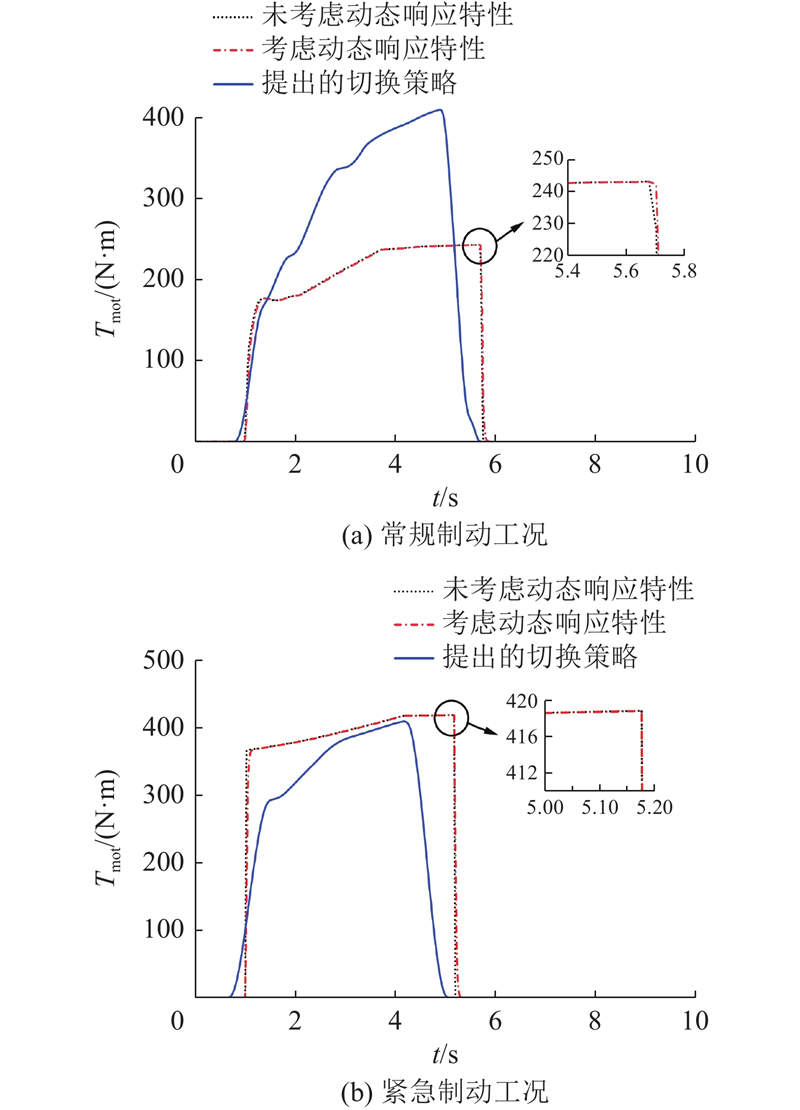
图 9
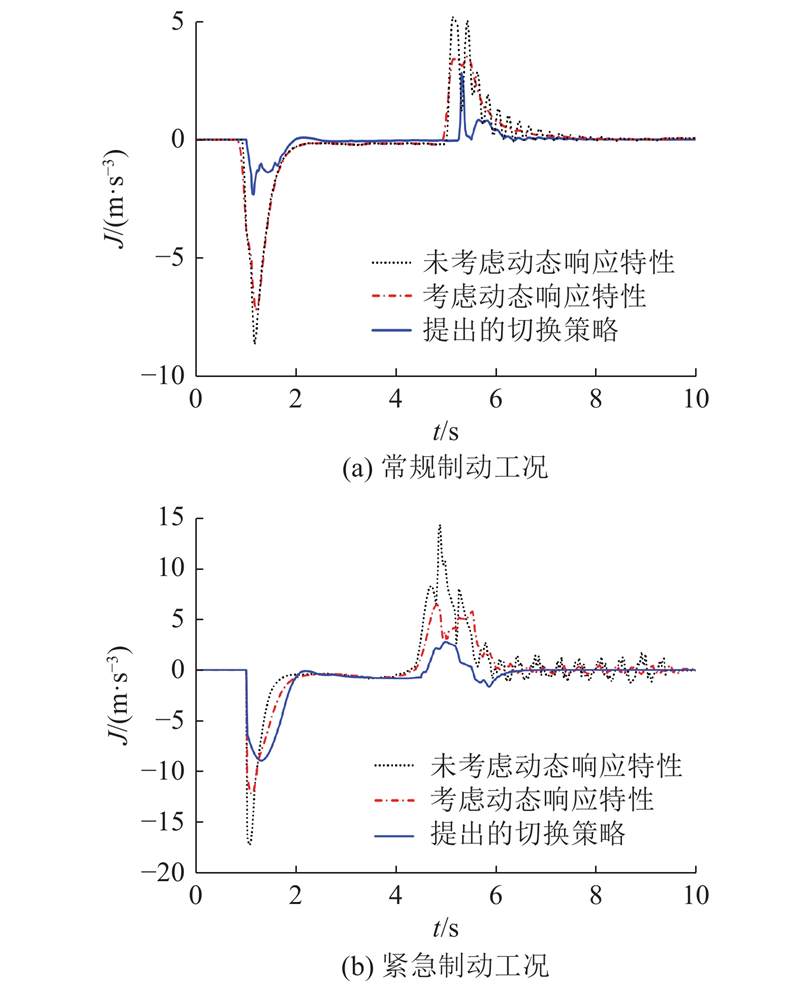
冲击度J是评价制动模式切换舒适性的关键指标,表达式为
鉴于德国和中国对冲击度的标准分别为10和17.64 m/s3[19],选取10 m/s3作为衡量切换品质的标准值. 如图10所示,制动冲击分别发生在车辆开始制动和最终停止的2个时间段内. 在如图10(a)所示的常规制动工况下,制动冲击分别发生在1 s和5 s. 在如图10(b)所示的紧急制动工况下,制动冲击分别发生在1 s和4.3 s. 这些制动冲击主要由系统从电机制动模式切换到电液复合制动模式时引起的制动力矩突变所致. 从图10(a)、(b)可以看出,无论是在常规制动还是紧急制动情况下,与未考虑或仅考虑制动系统动态响应特性的切换策略相比,提出的电液复合制动系统模式切换策略展现出更优越的切换品质. 在常规制动工况下,1 s和5 s时的冲击度分别为2.3 m/s3和2.7 m/s3,与其他2种策略相比,1 s时分别降低了73.3%和68.1%,5 s时分别降低了48.1%和22.9%. 在紧急制动工况下,1 s和5 s时的冲击度分别为8.9 m/s3和2.8 m/s3,与其他2种策略相比,1 s时分别降低了48.3%和25.2%,5 s时分别降低了414.3%和132.1%. 利用该策略,显著降低了制动冲击度,提升了制动舒适性.
图 10
4.2. 实验验证
搭建如图11所示的台架实验. 首先验证所搭建仿真模型的准确性,以确保该仿真模型能够真实反映电液复合制动系统的动态特性. 随后,评估所提模式切换策略在实际硬件上的控制效果与性能表现. 为此,将提出的控制策略导入上位机,通过台架实现实时控制与测试.
图 11

图 12
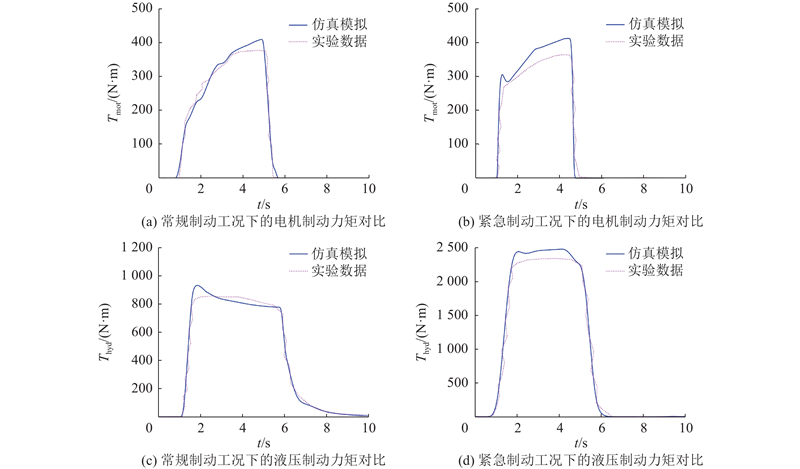
图 12 制动力矩的仿真与实验结果对比
Fig.12 Comparison between simulation and experimental result of braking torque
图 13
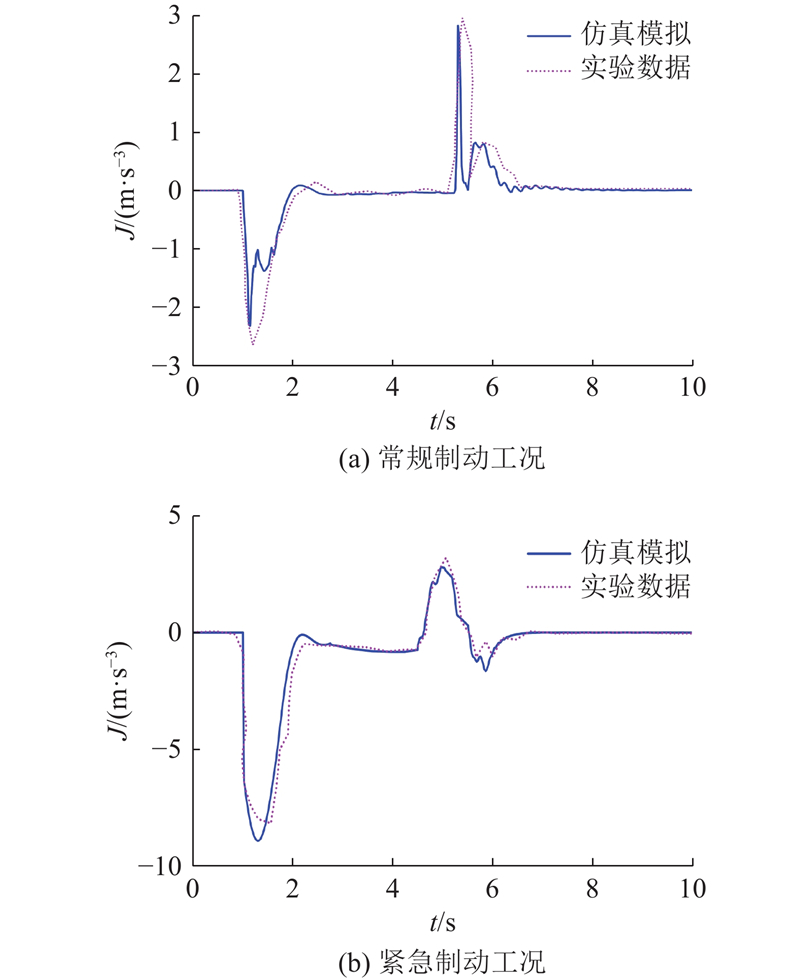
图 13 冲击度的仿真与实验结果对比
Fig.13 Comparison between simulation and experimental result of jerk
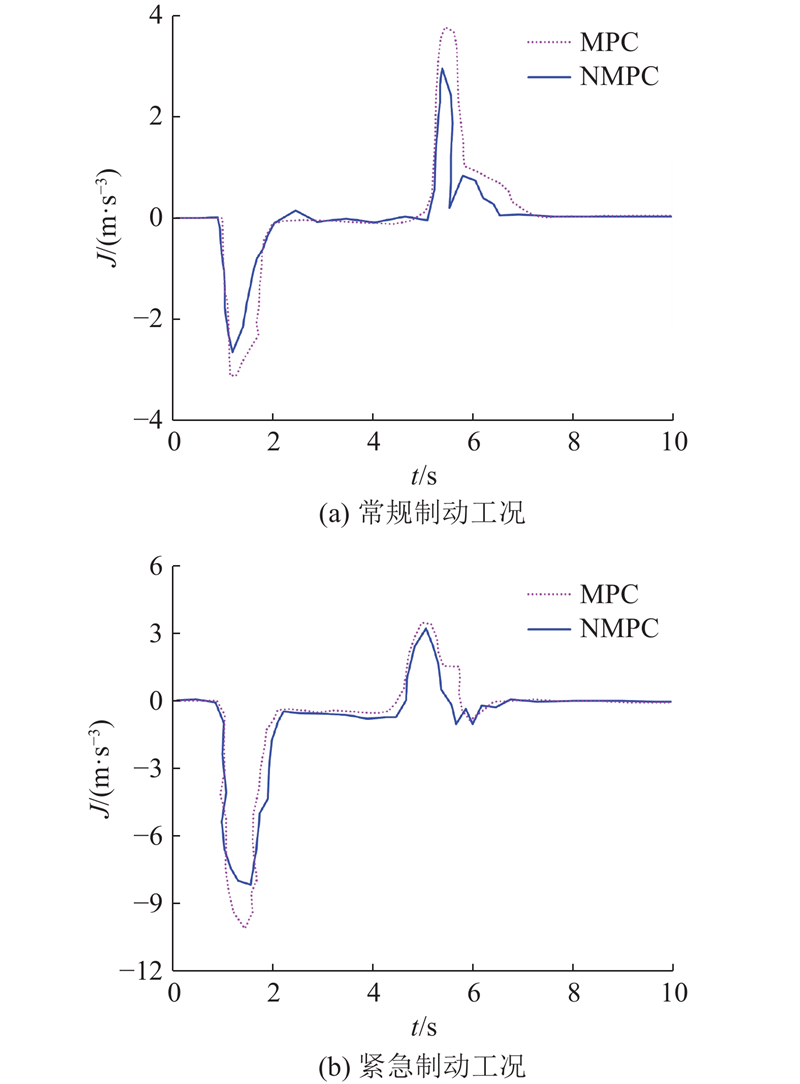
为了进一步验证NMPC在制动控制中的优越性,在相同的实验台架和制动工况下,增加了与传统MPC的对比实验. 为了确保对比的一致性,MPC的控制参数与NMPC保持一致,并分别在常规制动和紧急制动2种工况下进行测试,采集制动冲击度数据. 实验结果如图14所示. 可知,不管是在制动初期还是在制动结束阶段,NMPC在制动冲击度的控制上均优于MPC,冲击峰值明显降低,制动过程更加平顺. 结果表明,NMPC在提升制动舒适性方面具有明显的优势.
图 14
5. 结 论
(1)考虑电机与液压制动系统的动态特性差异及电机最大制动力的限制. 在合理约束电机补偿范围的基础上,充分发挥电机补偿作用,减小两者的动态差异. 当电机补偿达到极限时,采用双NMPC调节两者,实现目标制动力的精确跟踪.
(2)通过仿真与台架实验,验证了提出策略的有效性. 结果表明,在常规与紧急制动工况下,相较于未考虑或仅考虑制动系统动态响应的策略,本策略显著降低了制动冲击,冲击度分别减少了48.1%、22.9%和48.3%、25.2%,有效提升了制动舒适性.
参考文献
A systematic review of digital twins for electric vehicles
[J].DOI:10.1016/j.jtte.2024.04.004 [本文引用: 1]
Technoeconomic and environmental perspectives of biofuel production from sugarcane bagasse: current status, challenges and future outlook
[J].DOI:10.1016/j.indcrop.2022.115684
Cereal processing waste, an environmental impact and value addition perspectives: a comprehensive treatise
[J].DOI:10.1016/j.foodchem.2021.130352
Energy saving performance of agricultural tractor equipped with mechanic-electronic-hydraulic powertrain system
[J].DOI:10.3390/agriculture12030436 [本文引用: 1]
A novel electro-hydraulic compound braking system coordinated control strategy for a four-wheel-drive pure electric vehicle driven by dual motors
[J].DOI:10.1016/j.energy.2021.122750 [本文引用: 1]
Model predictive control system based on direct yaw moment control for 4WID self-steering agriculture vehicle
[J].DOI:10.25165/j.ijabe.20211402.5283 [本文引用: 1]
电动汽车复合制动控制研究现状综述
[J].DOI:10.3969/j.issn.1001-7372.2022.11.024 [本文引用: 1]
Review of electro-mechanical composite braking control for electric vehicles
[J].DOI:10.3969/j.issn.1001-7372.2022.11.024 [本文引用: 1]
基于PID控制方法的电磁液压复合制动系统建模与仿真
[J].
Electromagnetic modeling and simulation of hydraulic compound braking system based on PID control method
[J].
摩擦-电磁耦合制动系统及制动模式切换控制算法研究
[J].DOI:10.19620/j.cnki.1000-3703.20170694 [本文引用: 1]
Research on frictional-electromagnetic coupling braking system and braking mode switching control algorithm
[J].DOI:10.19620/j.cnki.1000-3703.20170694 [本文引用: 1]
Coordinated control strategy for braking and shifting for electric vehicle with two-speed automatic transmission
[J].DOI:10.1016/j.etran.2022.100188 [本文引用: 1]
Cooperative optimization of energy recovery and braking feel based on vehicle speed prediction under downshifting conditions
[J].DOI:10.1016/j.energy.2024.131699 [本文引用: 1]
电动汽车电-液复合制动协调控制方法
[J].
Coordinated control method of electric-hydraulic composite braking force for electric vehicle
[J].
基于混杂理论的电磁与摩擦集成制动方法
[J].
Electromagnetic and friction integrated braking method based on hybrid theory
[J].
电磁与摩擦集成制动系统模式切换响应控制研究
[J].
Study on responsiveness performance control strategy of mode switching for electromagnetic and friction integrated braking system
[J].
基于重构电压矢量的共直流母线型开绕组永磁同步电机改进直接转矩控制
[J].
Reconstructed voltage vector based improved direct torque control strategy for open-winding permanent magnet synchronous motor with common DC bus
[J].
Optimal anti-lock braking control with nonlinear variable voltage charging scheme for an electric vehicle
[J].DOI:10.1109/TVT.2020.2992756 [本文引用: 1]
基于系统效率优化的电液复合制动协调控制
[J].
Electric-hydraulic composite braking coordinated control based on system efficiency optimization
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}