

随着汽车保有量的快速增长,高速公路交通拥堵问题日趋严重. 为了深化供给侧结构性改革,发挥价格调节作用,各地区积极推广高速公路差异化收费,通过定价机制引导交通流量的合理分布,实现利益相关者间的互动[1]. 网联自动驾驶汽车(connected and automated vehicles, CAV)和车联网技术(vehicle to everything, V2X)的兴起为解决高速公路拥堵问题提供了新思路:研究驾驶者的出行行为,在博弈论框架下进行协作能够提升高速公路交通流的通行效率.
动态定价通过价格杠杆调节车辆行驶状态,为提升路网通行效率提供了可行路径. 现有研究聚焦3个方向. 1)差异化收费. 《全面推广高速公路差异化收费实施方案》中提到的高速公路差异化收费方式有分路段、分车型、分时段、分出入口、分方向、分支付方式. 多乘员车辆(high-occupancy vehicle, HOV)车道也属于差异化收费的一种方式. Konishi等[2]提出HOV政策鼓励拼车在某些情况下可以改善社会福利,从而减少总交通量;Zong等[3]研究了3种流量下差异收费的车辆碳排放和旅行者的汽车依赖性;闫晟煜等[4]构建考虑货车出行路径选择的差异化收费定价模型并求解,确定了最优通行费折扣,提高了临近高速公路的利用率. 虽然差异化收费在缓解高速公路交通拥堵[5]方面取得了显著成效,但其安全性与效率有待提升,并可能引发新的不公平问题. 将差异化收费与智能交通系统结合,可提高道路安全性与交通效率[6]. 2)协作变道下的效用转移. 在智能网联环境下,车辆变道可通过车车协作以更加安全、高效的方式完成. 协作变道下的效用转移是将变道过程中的效用以费用的方式进行转移,车辆在创造交通间隙的情况下进行交易,以换取经济补偿. Ji等[7]提出基于局部最优或全局最优的微观定价方法,激励驾驶者在协作变道决策中考虑社会后果;Lin等[8]将交通间隙看作可交易的资源或商品,允许驾驶者购买通行权或补偿其他车辆的变道许可;Sánchez等[9]提出允许车辆在交通状况欠佳时,交换信息并协作决策,改善交通状况. 上述研究以协作变道为手段,参与变道的车辆将效用与费用关联以取得局部最优,难以精确衡量驾驶者在协作变道中的收益,一些减少支付费用或获取更多利益的驾驶行为,还可能导致交通秩序混乱,降低交通流畅性. 3)动态定价. 高速公路动态定价考虑如实时交通状况、时间因素来灵活调整收费价格. Hall[10]通过模型分析,验证了高速公路上的交通流可通过为部分通道定价来产生帕累托改进;Abuzwidah等[11]指出,高承载收费(high-occupancy toll, HOT)车道不仅能让驾驶者快捷出行,也为优化交通安全和效率积累了经验;Farias等[12]提出将通行费作为价格信号,鼓励从高峰旅行转向非高峰旅行;Lombardi等[13]通过动态通行费定价来缓解郊区高速公路交通拥堵;武奇生等[14]设计动态计重收费数据处理及费率模拟系统,提升了定价的公平性;任英伟等[15]提出根据货车出行者的出行选择模型设定可变收费方案,促进了交通流的合理分布.
现有研究未见将车辆行驶状态直接融入定价模型的闭环反馈机制. 本研究以网联交通为背景,通过设计动态的通行费率模型,采取价格博弈的方式促使驾驶者规范驾驶行为,达到提升高速公路通行效率、确保行车安全的目的.
1. 问题描述
高速公路收费费率实时定价考虑因素单一且偏宏观,主要聚焦传统驾驶环境下的差异化收费. Laval等[16]提出依据道路实时运行状况动态调节定价,实现收入的最大化,但未将定价与单车联系起来;Lou等[17]依照驾驶者的支付意愿制定通行费,提高高速公路的吞吐量,但意愿主观性较强,且该调控为局部控制,非全局最优;Liu等[18]提出考虑土地利用与交通系统互动反馈关系的双层规划模型,使共享自动驾驶汽车和道路拥堵收费联合优化,但未融合智能网联车辆的运行特性;Genser等[19]分别利用Dijkstra算法和多项式Logit模型来计算宏观模型的动态系统最优与动态路由选择,通过训练多层神经网络模型找到最佳定价方法;Jin等[20]提出根据交通状况和出行需求动态调整在线道路通行费的方法;Kang等[21]通过定价引导和控制网联自动驾驶汽车以最佳方式通过收费车道提高收费站的通过性能,但未涉及整条高速公路道路资源的最大化利用问题. 此外,既有研究未能将费率定价与车辆运行状态相关联,以促进高速公路安全、高效的运营.
如图1所示为本研究提出的网联环境下高速公路收费费率动态定价模型(dynamic pricing model for expressway toll rates,DPM-ET)概念图. 该模型基于网联环境车辆运行状态实时可测的优势,在确保高速公路运营方基本收益的前提下,借助动态费率来调节驾驶者的出行行为. 优化框架分上下2层,上层将通行费率与车辆运行状态关联,基于车辆的实时运行状态构建多因子费率动态定价模型;下层借助斯塔克尔伯格(Stackelberg)价格博弈驱使驾驶者自发调节车辆的运行状态,实现高速公路使用者和运营方利益统一,达到提升高速公路资源利用效率和运行安全的目的. DPM-ET主要适用于分车道限速的三车道高速公路场景.
图 1
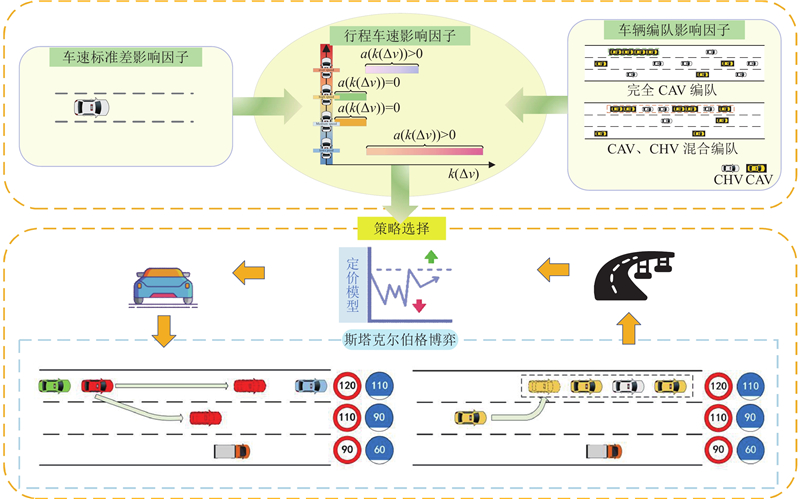
图 1 网联环境下高速公路收费费率动态定价模型的概念图
Fig.1 Conceptual diagram of dynamic pricing model for expressway toll rates in connected traffic environment
2. 优化方法
2.1. 优化目标
以最大化高速公路运行效率为目标,构建目标函数. 车辆编队项与总费用项采用负权重系数以保证优化方向的一致性:
式中:a、α、β为权重参数;ec为车辆变道对高速公路效率的影响;ef为车辆编队对高速公路效率的影响;ea为车辆加速度对高速公路效率的影响;
2.2. 收费费率定价模型
2.2.1. 行程车速影响因子
为了提高高速公路运行效率,激励车辆保持统一、最优车速行驶.
1)增益类行程车速影响因子. 当0≤Δv<
式中:k1(Δv)≤1,φ1为
2)损耗类行程车速影响因子. 当
式中:φ2为当Δv=
式中:φ3为当Δv=
2.2.2. 车速标准差影响因子
获取车辆在单位区间上的车速标准差,建立单车基础费率的车速标准差影响因子. 鼓励车辆以平稳的速度行驶,抑制车辆频繁加减速或非必要的变道超车,提升高速公路运营的安全性. 在空间区间[xj,xj+1]内:
式中:
2.2.3. 车辆编队影响因子
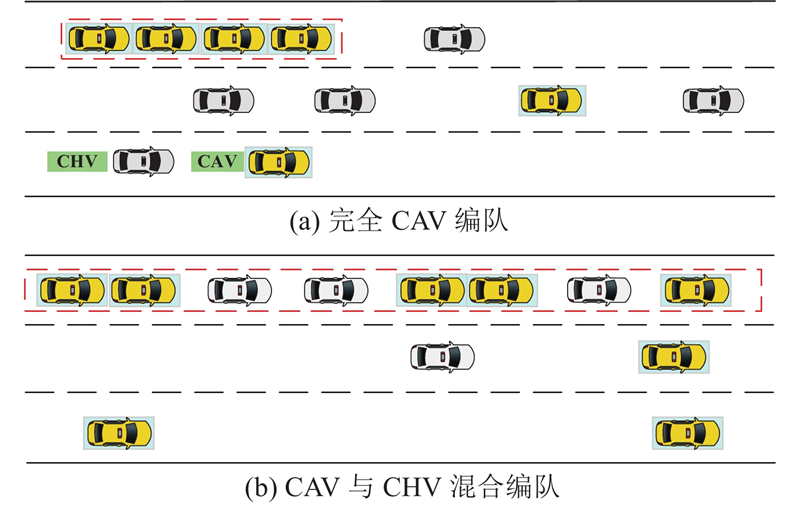
在网联环境下,高速公路上车辆可以完全CAV编队或CAV与车路协同人工驾驶车辆(connected human-driven vehicle, CHV)混合编队行驶,如图2所示. 编队行驶有利于压缩单车占用的高速公路时空资源,并因降低风阻(除编队头车外)而节省能源消耗,故依照编队行驶里程和编队规模对车辆给予一定的“奖励”. 编队识别基于车辆间建立的实时V2X通信连接,通过持续的信号交互验证编队稳定性. 在激励机制中,设定差异化补偿系数对头车的额外能耗予以补偿. CHV通过车载通信设备接收编队指令,既有的辅助驾驶功能(如定速巡航)为维持编队间距提供技术支持,驾驶员仅需执行纵向控制任务,为混合编队提供了可行性. 由此建立车辆编队影响因子模型:
图 2
式中:sα为当前编队里程权重参数;
2.2.4. 网联环境下高速公路费率动态定价模型
在传统定价策略的基础上,考虑高速公路运行车辆车速、车速标准差及车辆编队情况对高速公路资源利用效率和运营安全的影响,整合相关影响因子,进而联合定价建立多因子动态费率模型. 具体定价策略如下:
式中:Mij.z为车辆i在路段z中第j个定价区段的费率;pz为依据文献[22]对不规范驾驶行为裁定的罚款数额;χz,t为在t时刻进入路段z的车辆关于拥堵收费的收费系数;pi为第i辆车的基础通行费率;li为车辆i的行驶里程;ui为第i辆车差异化收费系数. 考虑到大型车辆的安全性低于小型车辆,除大型车辆只能在专用车道上行驶以外,通过规定大型车辆σ2≤σ4来对大型车辆超速行驶进行约束.
2.3. 定价下的博弈策略
高速公路运营中,运营方通过对定价策略进行调整来调节交通流量并提升道路资源利用效率;驾驶者根据通行费和自身需求,决策如何使用高速公路. 这种互动关系可视为博弈.
2.3.1. 斯塔克尔伯格博弈基础
博弈参与者包括领导者和追随者. 领导者为高速公路运营方,面向系统层面;追随者为行驶在高速公路路段上的车辆,面向个体层面. 斯塔克尔伯格博弈模型遵循的基本假设如下. 1)完全信息:所有参与者对费率调节规则、其他参与者的策略和收益函数等完全了解. 2)理性决策:参与者具有完全理性,能够根据自身利益最大化原则做出决策. 3)领导者-追随者顺序:博弈具有明确的时间顺序,领导者首先选择策略,追随者在观察到领导者的选择后再做出决策. 博弈的核心为运营方在车辆驶入高速公路前选择策略,实时公布高速公路费率及计价规则,驾驶者在收到运营方的决策后基于价格博弈作出反应,即是否驶入或驶入后如何调节行驶状态. 本研究假设参与者双方具有完全理性.
2.3.2. 车辆加减速及变道
如图3所示,高速行驶车辆车速符合最左侧车道限速要求,以较低的通行费通过该路段;低速车辆以不符合所在车道限速的较低速度行驶,通过该路段时给予较高的费率;排在低速车辆后的是受到低速车辆影响只能以较低车速行驶的车辆. 此时低速车辆作为追随者与运营方进行博弈,在高速公路制定的定价措施下,当车速大于(1−m)
图 3

图 3 价格博弈机制下的车辆状态选择(车辆速度)
Fig.3 Vehicle state selection under price game mechanism (vehicle speed)
2.3.3. 车辆编队
如图4所示,虚线框内的车辆为编队车辆,基于车辆编队在降低能耗、提升行车安全性和道路通行能力方面的优势,鼓励车辆编队行驶具有重要意义. 同时考虑多出入口下车辆进出对车辆编组的影响,一般情况下合流控制采用2阶段策略:第1阶段通过V2I获取匝道车辆位置与速度,主路编队动态调整车间距,形成可汇入间隙;第2阶段通过协同速度匹配算法为匝道车辆提供汇入窗口[23]. 分流控制须提前500 m启动车道分配,通过分布式优化算法将车辆分批引导至目标车道,避免集中变道引发的拥堵链式反应[24]. 在价格博弈机制下,决策车辆在评估编队行驶带来的潜在折扣收益与其他因素后,多数倾向于选择加入编队;选择不加入编队的车辆将无法享受相应折扣,以原运行状态行驶.
图 4

图 4 价格博弈机制下的车辆状态选择(车辆编队)
Fig.4 Vehicle state selection under price game mechanism (vehicle platoon)
2.3.4. 双方策略的选择
如表1所示为双方策略选择结果对应的综合效益指标,Cd为对应策略下驾驶者的效益增益,Ch为对应策略下运营方的效益增益. 运营方为领导者,策略空间是所有可能的定价函数集合,这个函数将实时交通状态映射为价格;驾驶者为追随者,策略空间是在给定定价规则和当前交通状态下所有可行的驾驶行为的集合. 领导者的收益函数表现为运营方寻求最大化系统总福利;追随者的收益函数为车辆追求最大化净效用,通常表现为最小化总成本. 领导者可实施2种策略:较高定价和较低定价. 车辆驶过计费路段会产生2种结果:高付费和低付费. 数学角度下表1中的4种情况均可实现,但基于实际情况,在追随者与领导者进行博弈时,定价基于车辆行驶状态实时改变,较高定价对应低付费和较低定价对应高付费的情况不会发生,因此不纳入考虑范围. 当车辆行驶状态不利于高速公路效率提升时,高速公路会对该状态下车辆收取较高的通行费,大部分车辆在费用的驱动下会选择调整行驶状态,完成“低效→高收费→高效→低收费”的单车优化过程,提升高速公路运行效率;小部分驾驶者依然会选择以原状态行驶,车辆将被收取较高的通行费,以补偿车辆对高速公路资源利用造成的损失. 双方策略博弈的斯塔克尔伯格均衡是策略对,同时满足领导者最优决策与追随者最优反应,即领导者选择能最大化系统总福利的定价函数,追随者在领导者给定的定价策略下每辆车的行为都是个体最优反应. 在本模型中,斯塔克尔伯格均衡的存在性在定价函数与行为空间连续、凸性的条件下得以保证,表明通过定价引导车辆驾驶行为在理论上是可行的. 均衡的唯一性通常无法保证,原因是系统目标的多峰性与车辆异质性可能导致多个稳定状态. 本研究核心是设计能稳健引导至最优均衡的定价机制.
表 1 双方策略选择结果
Tab.1
| 驾驶者 | 运营方 | |
| hc | lc | |
| hm | Cd(hm, hc), Ch(hc, hm) | Cd(hm, lc), Ch(lc, hm) |
| lm | Cd(lm, hc), Ch(hc, lm) | Cd(lm, lc), Ch(lc, lm) |
3. 求解算法设计
将车辆的驾驶决策问题视为多阶段组合优化问题,每个决策阶段对应1个短期规划窗口. 在此基础上,利用滚动规划机制与基于代价函数的多策略组合评估方法,在每个阶段动态选择最优速度、车道变换和编队状态.
3.1. 状态与决策变量
3.1.1. 状态变量
车辆i在阶段j(从j−1~j km)末端的状态表示为
式中:lj∈{0,1,2}为当前车道索引;vj为车辆在阶段
3.1.2. 决策变量
车辆在每个阶段面临3类决策选择,组合构成策略集:
式中:Δlj∈{−1,0,+1}为变道决策, 即在阶段
3.2. 策略代价函数构建
在阶段j,给定上一步状态sj-1,枚举所有可行的策略gj∈Gj(sj−1),计算总代价函数fj(sj−1,gj),用于策略选择.
3.2.1. 代价函数定义
阶段总代价函数综合了归一化后的效率代价与经济效益,确保量纲统一:
式中:
3.2.2. 策略枚举空间
每项控制策略的候选集合如下:
3.3. 动态规划与滚动优化机制
采用前向动态规划与滚动控制机制相结合的方式,在每个触发时点进行策略更新. 定义累计目标函数为
初始状态F0(s0)=0. 为了控制计算复杂度,在每阶段仅保留总代价前K最优状态作为候选状态集,提高滚动规划效率.
3.4. 算法执行步骤
最优策略求解具体实现过程如下:1)初始化状态集合S0={s0},令F0(s0)=0;2)触发更新,进入优化过程;3)对上阶段每个候选状态sj−1∈Sj−1,枚举所有可行策略gj∈Gj(sj−1);4)计算每对(sj−1,gj)得到的新状态sj与总代价Fj(sj);5)更新状态集合Sj,并保留总代价最小的前K个状态;6)确定累计代价最小的当前阶段策略gj*,并通过TraCI接口执行对应的速度、变道与编队指令;7)将该策略在接下来的N步时间窗内复用,完成控制输出(在本研究中,N=1,即策略仅在本阶段生效,确保决策与计费周期严格同步);8)随仿真推进进入下个优化窗口,回到步骤2).
4. 仿真分析
利用SUMO搭建仿真场景,通过Python调用TraCI接口与仿真环境实时交互,验证DPM-ET的成效. 集成开发环境为PyCharm 2024.3.1,进行不同交通状况下车辆驶入高速公路及驶出高速公路的轨迹对通行费、延误等的影响仿真分析.
4.1. 仿真设计
表 2 模型仿真分析参数取值
Tab.2
| 参数 | 数值 | 参数 | 数值 | |
| 0车道最高限速/(m·s−1) | 25 | 0车道最低限速/(m·s−1) | 16.67 | |
| 1车道最高限速/(m·s−1) | 30.56 | 1车道最低限速/(m·s−1) | 25 | |
| 2车道最高限速/(m·s−1) | 33.33 | 2车道最低限速/(m·s−1) | 30.56 | |
| 最大加速度/(m·s−2) | 3.0 | 最小加速度(m·s−2) | −5 | |
| CAV平均时距/s | 1/2 | CAV反应时间/s | 0.1 | |
| CHV平均时距/s | 2/3 | CHV反应时间/s | 1.0 | |
| 低交通流量/(pcu·h−1) | 1 500 | 中流量/(pcu·h−1) | 2 000 | |
| 高交通流量(pcu·h−1) | 2 500 | 重复次数 | 5 | |
| 仿真时长/s | 3 600 | 车辆长度/m | 5/12 |
4.2. 仿真结果
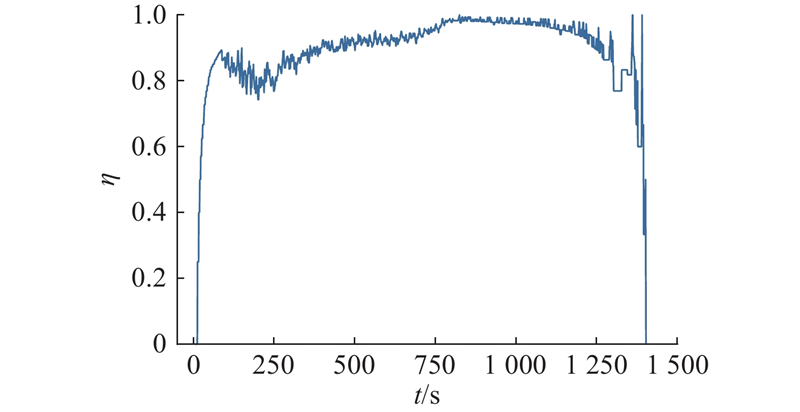
如图5所示为编队率η随时间t的变化情况,共分为3个阶段. 初始阶段,编队率从0快速攀升至0.90,定价模型驱动车辆短时间聚合,构建协同通行基础. 稳定运行阶段,编队率维持0.95~1.00的高位,车辆长期保持编队,使高速通道速度一致性提升,保障流畅通行. 扰动衰退阶段,编队率虽受临时干扰骤降,但稳定不低于0.70,前期积累的编队黏性与模型鲁棒性,降低外部冲击对交通流的影响,维持通行韧性. 整体来看,编队率从缩短无序时长、强化速度协同到增强抗扰性的三阶段演化,系统性验证了定价模型在调控车辆编队、保障高速公路通行效率上的价值.
图 5
如图6所示为各车道车辆保有量q和平均车速
图 6
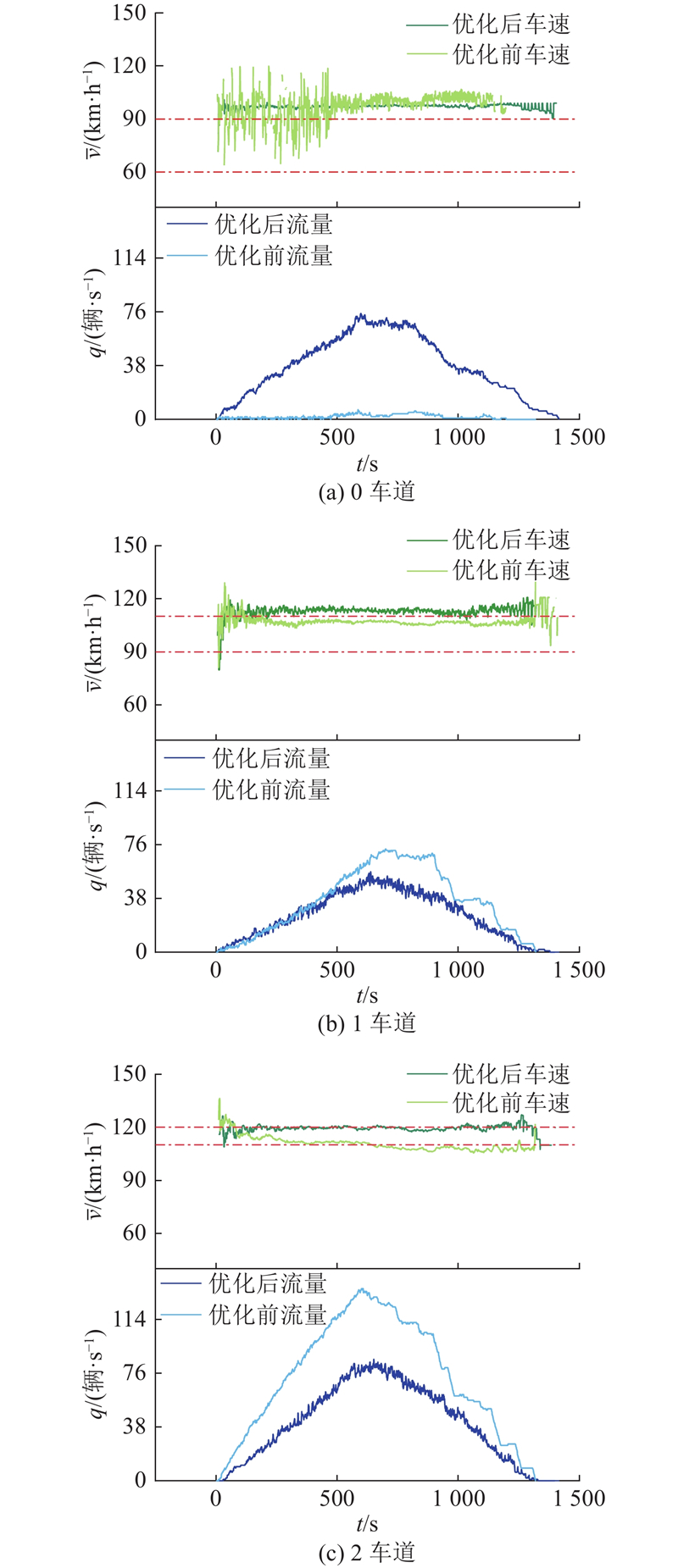
图 6 各车道车速与车道车辆保有量对比
Fig.6 Comparison of vehicle speed and vehicle inventory in each lane
如图7所示为不同交通流量下车辆的通行费p、通行时间及平均速度偏差MD对比,其中MD为车辆的速度与最高限速差值绝对值的平均值. 在中流量情况下,通行费与MD的正相关性最为显著. 这表明在该状态下,车辆能够较好地响应费率调控,倾向于选择与所在车道低费率对应的车速行驶,有助于提升高速公路的整体运行效率. 在低流量条件下,通行费与通行时间之间的正相关性最强. 这说明当交通流较为稀疏时,车辆行驶更为自由,受其他车辆干扰较小,驾驶行为更容易受到费率的引导,从而更主动地选择效率更高的行驶策略. 从通行费的整体分布来看,水平呈现出随着流量增加而递增的趋势,即低流量下的通行费低于中流量,中流量下的通行费低于高流量,实现路网资源的动态优化配置与整体通行效率的全面提升.
图 7

图 7 不同交通流量下的通行费、通行时间及平均速度偏差对比
Fig.7 Comparison of toll fees, travel time, and average speed deviation under different traffic volumes
4.3. 方案对比
为了验证定价模型的可行性,本研究提出新的评价指标——最优速差异价值(value of optimal speed difference, VoOSD). VoOSD反映车辆在车道级别行驶的速度效率及与通行费的关系,是指所有车辆的瞬时车速与各自所在车道最高限速的差值,经取绝对值处理后计算的平均值与负通行费之比. 将DPM-ET与2种定价方案AIR-RPT[26]、TA-CFCTDT[27]在相同环境下进行对比. AIR-RPT通过双链路并行网络,使用动态编程离线计算多种车辆到达模式下的最优收费序列,并通过神经网络结合模糊逻辑路线选择模型动态调整收费,实现收入最大化与总旅行时间最小化目标. AIR-RPT适用于城市高峰期高速公路的拥堵定价管理,提升整体通行效率和运营收益. TA-CFCTDT通过级联反馈控制动态调整车道收费,优化流量与服务水平,主要用于城市高峰期高速公路拥堵管理,实现高效通行和收入优化.
如图8所示为不同方案在车道级别的速度效率及其与通行费的关系,展示了通行费作为经济调控信号,对车辆运行状态产生的直接引导作用. 在DPM-ET下,数据点紧密斜向下线性分布,构成费用到行为调控的关键回路. 具体而言,当车辆的运行状态不佳时,模型会即时产生较高的费率,表现为VoOSD向负方向移动. 此时驾驶员为了降低出行成本,会对经济惩罚信号做出即时响应,主动采取加速、变更至更通畅车道的行为. 反之,始终保持高效行驶的车辆将获得低通行费的持续奖励. 这一闭环反馈使得车辆群的整体运行状态被有效维持在限速附近窄带内,表现为MD集中在0~5 km/h,实现了通行费对交通流状态的平滑与稳定作用. 图8(a)中,MD集中在0~5 km/h,说明该方案下车辆行驶速度主要围绕所在车道的最高限速±5范围内,保证车辆行驶的安全性与高效性. 受定价模型影响,当车辆的速度效率较高时,车辆的通行费较低,使得VoOSD集中在−0.4~0 km/(h·元),整体分布形式呈斜向下的线性,MD在一定范围内小幅度波动,符合DPM-ET依照单车行驶状态进行实时定价的特点. 图8(b)中的数据点分散,车速值不集中且与所在车道最高限速差值较大,有车速过高或效率过低的风险. 图8(c)中,MD基本位于0~12.5 km/h,VoOSD大都处于−1~0 km/(h·元),速度效率分布较为优秀,但与DPM-ET相比,速度效率与车辆通行费的关联程度较低.
图 8
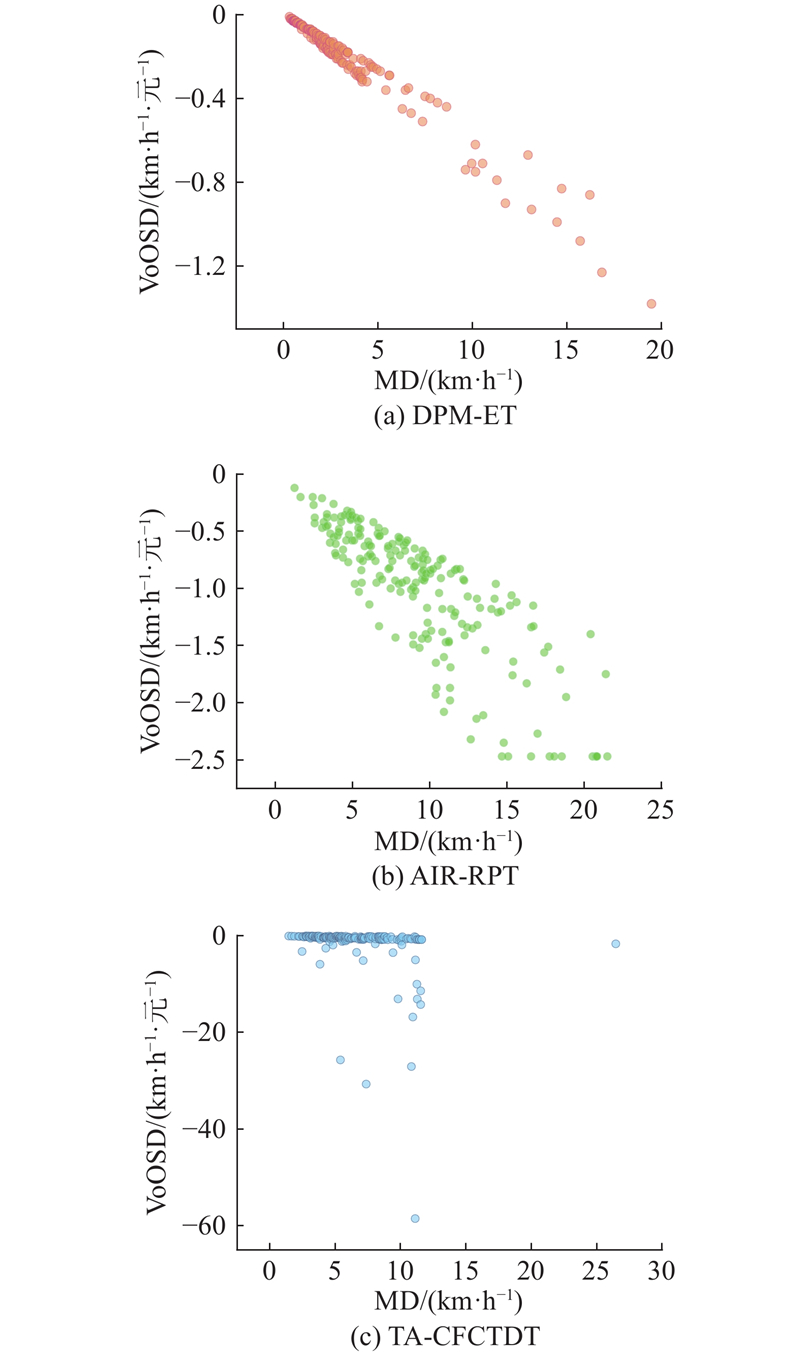
图 8 最优速差异价值的数据分布(3种方案)
Fig.8 Distribution of value of optimal speed difference (three schemes)
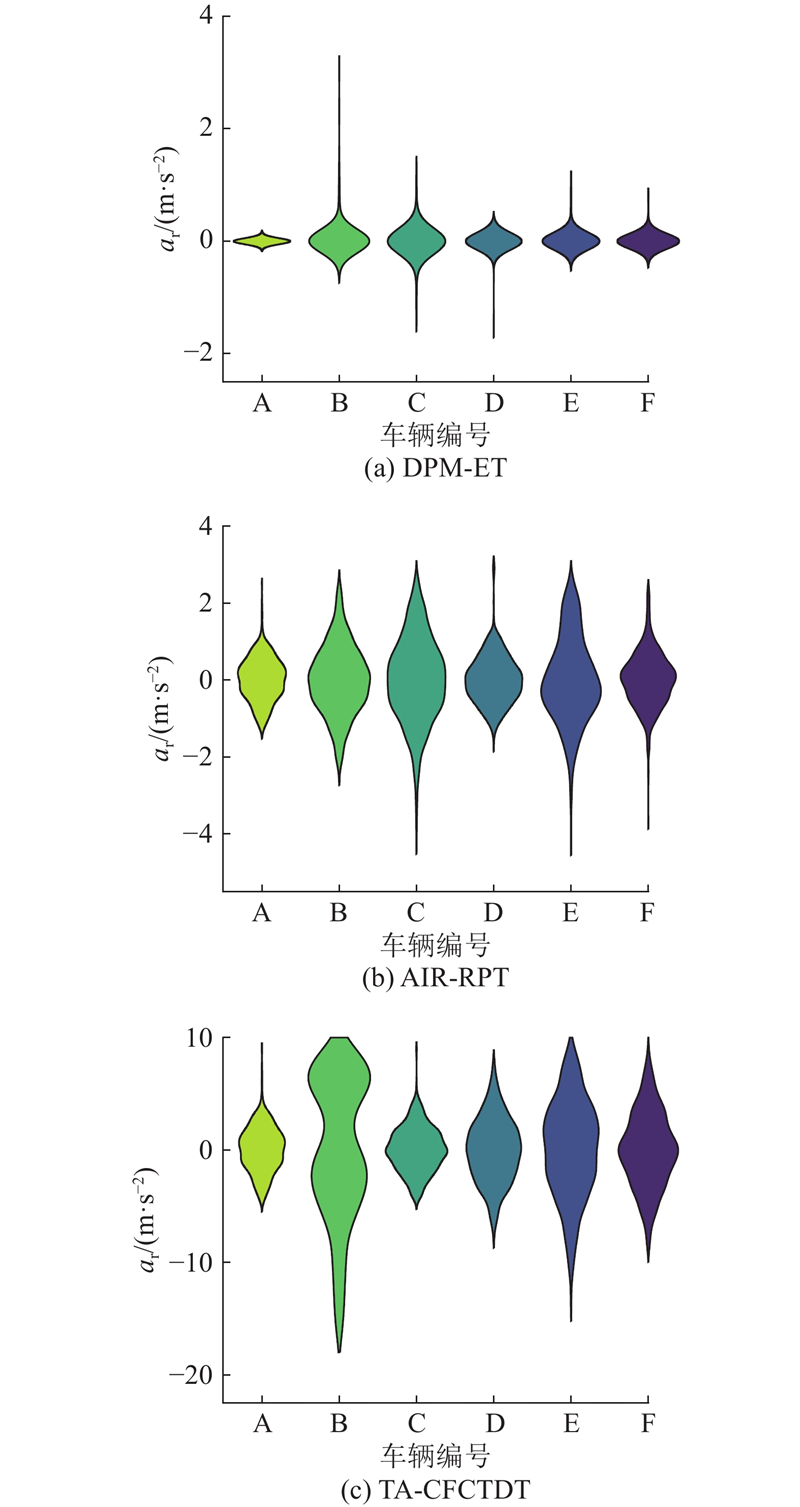
如图9所示为不同方案在运行平稳性方面的差异. 每种方案随机选取6辆车每时刻的加速度ar进行对比. 对比发现,DPM-ET的运行加速度平稳性均好于未采用单车实时定价的对比方案. 图9(a)中,6辆车的数据形态窄小且紧凑,加速度值离散程度低;车辆的加速度波动小,运行过程具备显著平稳性,极端值对整体分布影响微弱. 图9(b)中,加速度值存在一定离散性,该方案的加速度波动虽较TA-CFCTDT的有所改善,但与DPM-ET相比,离散程度仍较高,平稳性不足,即加速度数据分布相对分散,运行稳定性有待提升. 图9(c)中,数据分布图呈现出明显宽展形态,加速度值分布跨度大. 因此TA-CFCTDT运行时,加速度波动频繁且幅度大,稳定性欠佳,加速度数据离散分布在较广区间,极端值易对整体运行状态产生干扰. 对比结果验证了DPM-ET在车辆运行加速度稳定性方面的显著优势,为方法的优选及进一步优化提供有力数据支撑.
图 9
如图10所示为不同方法下不同车道的平均车速分布情况,其中
图 10
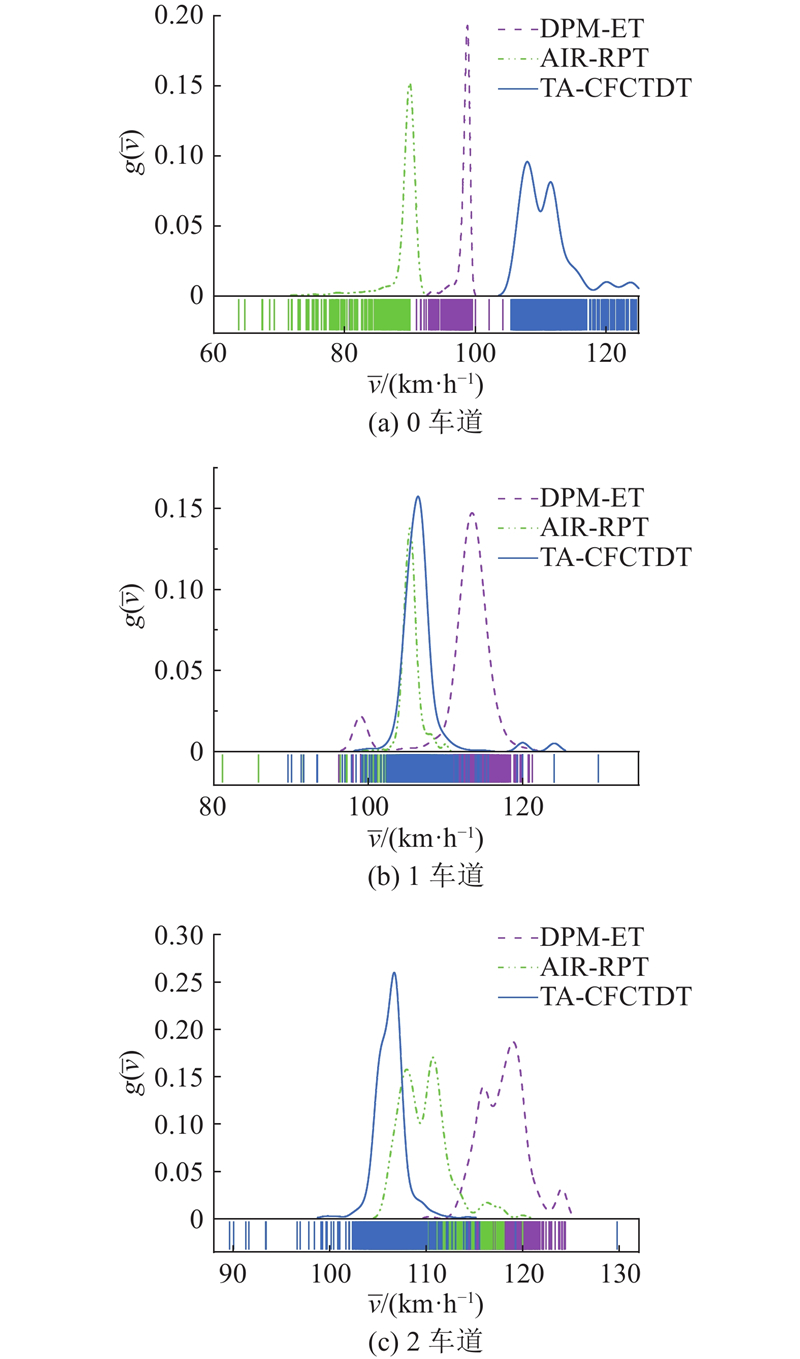
图 10 不同方案的平均车速对比(3条车道)
Fig.10 Comparison of average vehicle speed across different schemes (three lanes)
4.4. 敏感性分析
如图11所示,通过多参数组合试验对目标函数值f的变化趋势开展敏感性分析,以明确关键参数对系统输出的影响规律. 从参数组合与目标函数值的关联来看,系统对参数的敏感性呈现显著的阶段性与关联性特征. 在低a条件下,无论α、β如何变动,f始终维持在15~20的相对稳定的区间,表明此阶段α与β对结果的影响力较弱,系统具备较强的鲁棒性. 随着a增大,参数组合的敏感性逐渐增强. 当a=0.9时,后期α、β调整会使目标函数值从15急剧攀升至35以上. 在后期参数组合里,高a会强化α、β对结果的影响. 参数变化存在明显的临界点,进一步分析表明,当a=0.9时,α=0.1、β=0.5的情况下效果最好.
图 11
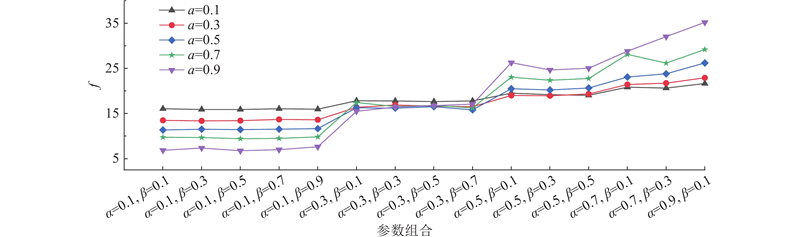
图 11 不同参数组合的目标函数值对比
Fig.11 Comparison of objective function values for different parameter combinations
将参数分为4组,进行定价模型的参数敏感性分析,结果如表3所示. 组1为行程车速影响因子参数敏感性分析,通过系统性参数迭代测试,当m=0.2、φ1=0.8、φ2=2.0、φ3=1.7时,模型输出目标函数值为测试区间内的最优解. 从模型逻辑看,该参数组合能更精准引导车辆出行行为,减少无效拥堵损耗,尽管参数空间存在大量组合,但最优解在多轮敏感性测试中保持稳定,说明该参数配置并非偶然极值,而是模型在交通流调控逻辑与系统目标间的适配平衡点. 组2中参数为车速标准差影响因子,当w=2.0、Δx=
表 3 参数敏感性分析结果
Tab.3
| 组别 | 参数 | 数值 | 组别 | 参数 | 数值 | |
| 1 | m | 0.2 | 3 | d1 | 0.90 | |
| φ1 | 0.8 | d2 | 0.85 | |||
| φ2 | 2.0 | d3 | 0.75 | |||
| φ3 | 1.7 | ζ | 10.0 | |||
| 2 | w | 2.0 | ϖh | 1.3 | ||
| Δx | ϖf | 1.0 | ||||
| σl | 3.2 | 4 | nh | 1.05 | ||
| k | 0.67 | nm | 1.00 | |||
| 3 | sα | 0.7 | nl | 0.90 |
5. 结 语
本研究1)基于网联环境下车辆运行状态实时可测的特点,考虑车辆运行速度、速度方差及是否编队等因素,建立高速公路收费费率动态定价模型,解决了既有定价模型灵活性差、难以改善高速公路通行效率与运行安全的问题. 2)提出费率动态定价模型,利用斯塔克尔伯格价格博弈推动运营方与驾驶者调整定价策略和车辆行驶状态,实现了高速公路运行效率和驾驶者收益的平衡,对高速公路可持续发展具有一定的理论与实践意义. 3) 仿真结果表明,DPM-ET相较于基准方案,车道平均速度提升了2.01%~6.74%,速度稳定性提升了5.22%,编队率最高达到0.9. 相较于同类定价方案,VoOSD效果提升了4.68~5.37倍,速度稳定性提升了21.17%,车道平均速度提升了5.22%~11.05%. 验证了DPM-ET在提升高速公路运行效率方面的优越性. 4) 界定了收费费率动态定价模型的参数取值,分析表明,编队里程权重参数sα、编队规模定价系数d1、奖励系数φ1、指数衰减速率系数k、标准差定价因子上限σl对定价模型的影响显著,sα=0.7、d1=0.6、φ1=0.8、k=0.67、σl=3.2为定价模型的最佳适用条件. DPM-ET仅考虑车速、速度稳定性及车辆编队3个影响因子,后续计划拓展定价维度,引入车道车流密度、多路段路径选择倾向因子,考虑天气对动态费率的影响,开发针对突发事件的应急交通定价策略. 本研究验证了定价模型在三车道、中等交通量场景中的有效性,后续计划开展更复杂道路交通状况的模型性能验证;车辆博弈简化处理可能引发决策延迟、行为扰动在车流中的传播高估问题,费率在拥堵流中因换道可行性下降而失效. 未来计划开展的研究将面向应对驾驶者“有限理性”行为对价格信号响应的不确定性,以及CAV渗透率对这种不确定性的影响;拓展应用场景时,宜深度融合行为科学,以发展更具普适性的智能定价策略;开发融合实时交通状态与延迟补偿的动态定价算法,以提升策略的鲁棒性与实用性.
参考文献
Low-carbon joint dispatch of integrated energy systems based on differentiated dynamic pricing mechanisms
[J].DOI:10.1016/j.ijepes.2023.109774 [本文引用: 1]
Carpooling and congestion pricing: HOV and HOT lanes
[J].DOI:10.1016/j.regsciurbeco.2010.03.009 [本文引用: 1]
Congestion pricing for sustainable urban transportation systems considering carbon emissions and travel habits
[J].DOI:10.1016/j.scs.2024.105198 [本文引用: 1]
高速公路货车差异化通行费折扣的双层规划模型
[J].DOI:10.16511/j.cnki.qhdxxb.2025.21.022 [本文引用: 1]
Bi-level programming model for differentiated toll discounts for expressway trucks
[J].DOI:10.16511/j.cnki.qhdxxb.2025.21.022 [本文引用: 1]
基于降本增效的高速公路差异化收费讨论
[J].
Discussion on differential tolling for expressway based on cost reduction and efficiency improvement
[J].
Pricing lane changes
[J].DOI:10.1016/j.trc.2023.104062 [本文引用: 1]
Pay to change lanes: a cooperative lane-changing strategy for connected/automated driving
[J].DOI:10.1016/j.trc.2019.06.006 [本文引用: 1]
Distributed and collaborative system to improve traffic conditions using fuzzy logic and V2X communications
[J].DOI:10.1016/j.vehcom.2024.100746 [本文引用: 1]
Pareto improvements from Lexus Lanes: the effects of pricing a portion of the lanes on congested highways
[J].DOI:10.1016/j.jpubeco.2018.01.003 [本文引用: 1]
Assessing the impact of express lanes on traffic safety of freeways
[J].DOI:10.1016/j.aap.2024.107718 [本文引用: 1]
An overview of dynamic pricing toll roads in the United States: pricing algorithms, operation strategies, equity concerns, and funding mechanism
[J].DOI:10.1016/j.cstp.2024.101226 [本文引用: 1]
Dealing with a multiple access congested suburban freeway using a dynamic toll pricing approach
[J].DOI:10.1016/j.trpro.2023.11.469 [本文引用: 1]
计重收费数据处理与费率模拟
[J].DOI:10.3969/j.issn.1672-4747.2008.02.005 [本文引用: 1]
Data processing and rate simulating of loading-based toll collection
[J].DOI:10.3969/j.issn.1672-4747.2008.02.005 [本文引用: 1]
高速公路可变收费评价指标体系
[J].DOI:10.3969/j.issn.1672-4747.2009.01.004 [本文引用: 1]
Variable pricing evaluation and the evaluation index system of freeway
[J].DOI:10.3969/j.issn.1672-4747.2009.01.004 [本文引用: 1]
Real-time congestion pricing strategies for toll facilities
[J].DOI:10.1016/j.trb.2014.09.015 [本文引用: 1]
Optimal dynamic pricing strategies for high-occupancy/toll lanes
[J].DOI:10.1016/j.trc.2010.03.008 [本文引用: 1]
Joint optimal pricing strategy of shared autonomous vehicles and road congestion pricing: a regional accessibility perspective
[J].DOI:10.1016/j.cities.2023.104742 [本文引用: 1]
Dynamic optimal congestion pricing in multi-region urban networks by application of a Multi-Layer-Neural network
[J].DOI:10.1016/j.trc.2021.103485 [本文引用: 1]
A dynamic and deadline-oriented road pricing mechanism for urban traffic management
[J].DOI:10.26599/tst.2020.9010062 [本文引用: 1]
Modeling and optimization of toll lane selection for connected and automated vehicles at toll plazas
[J].DOI:10.1016/j.physa.2024.129565 [本文引用: 1]
Traffic dynamics around freeway merging area with mixed conventional vehicles and connected and autonomous vehicles
[J].DOI:10.1142/S0129183122501285 [本文引用: 1]
Modeling bounded rationality in discretionary lane-changing with the cumulative prospect theory
[J].DOI:10.1080/19427867.2025.2495940 [本文引用: 1]
Joint optimization of longitudinal and lateral locations of autonomous-vehicle-dedicated lanes on expressways
[J].DOI:10.1109/TITS.2023.3306792 [本文引用: 1]
A real-time road pricing system: the case of a two-link parallel network
[J].DOI:10.1016/j.cor.2005.02.041 [本文引用: 1]
Dynamic pricing for toll lanes: a case study
[J].DOI:10.1016/j.ifacol.2016.07.005 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}