

多个地图的数据会带来庞大的数据量,也增加了定位过程中的计算负担. 通常定位服务提供商(localization service provider, LSP)会将定位涉及的计算外包给资源丰富的云服务提供商(cloud service provider, CSP) [7],与CSP进行数据交互完成定位. CSP往往不是可信的实体,在整合数据的过程中,可能涉及用户的敏感信息. 这些数据一旦被恶意攻击者窃取或CSP滥用,将可能导致严重的隐私泄露. 针对室内定位隐私保护问题,学者提出了多种解决方案. 乐燕芬等[8-9]将同态加密算法应用于室内定位中,利用算法的同态性,在完成定位的同时实现对用户和服务器端隐私的保护. Wang等[10-11]运用差分隐私机制和聚类方法掩盖用户的真实位置信息,保护隐私的同时维持一定的定位精度. 以上方案均属于两方协议,用户和LSP都承担了本地加密的计算开销,且两者的直接通信也有隐私泄露的风险. 有一些方案可以实现云环境中位置隐私的保护,乐燕芬等[12]基于非对称内积标量保留加密(asymmetric scalar-product-preserving encryption, ASPE)与布隆过滤器(Bloom filter, BF),将用户快速安全定位至地图的局部区域,并设计访问控制机制以设定地图的访问权限,为用户提供不同层级的服务. ASPE算法不能抵御已知明文攻击,方案对LSP的资源保护有限. 张应辉等[13-15]提出的方案均由第三方CSP来承担定位中加密指纹的计算或匹配引入的计算开销. Wang等[14]的方案通过引入保持欧式距离的局部敏感哈希,把指纹信息转换为布隆过滤器,采用内积确定k最近邻(k-nearest neighbors, KNN),方案的计算效率较高,但局部敏感哈希不可避免地会导致定位精度下降. 张应辉等[13,15]所提方案都需要LSP和CSP在在线阶段同时参与每个用户密文域的相关指纹计算,其中张应辉等[13]的方案融合了k匿名与Paillier同态加密算法,LSP须聚合大量密文数据,对用户只实现了k匿名的隐私强度. 文献[15]的工作是基于文献[9]展开的,由LSP在密文域完成用户与地图内所有指纹的距离计算;为了降低用户的解密开销,由CSP完成解密和KNN匹配,在此过程中引入混淆电路和不经意传输,保证用户KNN索引的隐私,但LPS和CSP要频繁、大量地通信.
适应云环境的方案还存在如下局限性:仅针对单一地图场景,无法在多地图中部署;需要用户构建完整的加密定位请求指纹向量才能与参考点指纹完成一致的匹配,这种匹配机制暴露了服务器的接入点 (access point, AP)结构信息;也有部分方案在定位时会造成参考点坐标的泄露[14-15],存在服务器资源泄露的风险. 本研究提出适用于多地图的定位隐私保护方案,1) 设计基于布隆过滤器的AP完全匿名匹配算法,在不泄露任何位置服务相关信息的前提下快速将用户粗定位至某个子地图. 2) 结合改进的索伦森(Sørensen)距离匹配和Paillier同态加密算法,设计安全的KNN算法,实现准确、高效的用户定位. 3)引入指纹信号重构机制,确保用户在未知服务器AP结构的条件下构建自身定位请求,防止指纹库数据泄露.
1. 相关技术
1.1. 基于改进索伦森距离的Wi-Fi指纹定位算法
基于接收信号强度指示(received signal strength indication, RSSI)的室内定位算法[16]通常通过对无线信号强度指纹匹配实现设备定位. 该算法分为离线与在线2个阶段. 离线阶段,LSP在监控区域内布置若干参考点(reference point, RP),并使用移动设备扫描周围Wi-Fi接入点信号,记录RSSI的数值,将每个参考点接收的AP信号强度集合定义为该参考点的指纹. 这些指纹数据按参考点顺序存储于LSP端的离线指纹库中. 在线阶段,用户通过移动设备采集当前位置的信号特征,将其与离线指纹库中的指纹数据进行比对. 采用KNN算法根据待测点与指纹库中各参考点的距离确定用户的最近邻参考点,并由此估算用户的位置.
式中:X和Y均为指纹;xi和yi为指纹中的分量;M为指纹的维数,即参与定位的AP数量. MSD通过对各分量的差值进行归一化来减少单一维度偏差对计算结果的影响,已有的室内定位的相关研究表明,MSD在提升定位精度方面优于其他距离度量标准.
1.2. 布隆过滤器
布隆过滤器是高效的概率型数据结构[17]. 该结构通过位数组和多个哈希函数结合,提供紧凑的集合表示形式,能够在较低的存储成本下实现高效的成员查询. 布隆过滤器B由长度为m的位数组和t个哈希函数组成,主要涉及元素插入和成员查询2个操作. 1) 元素插入:元素x被插入位数组B,通过t个哈希函数
2) 元素查询:在查询某个元素y是否属于集合S时,同样通过这t个哈希函数计算哈希值,并检查位数组中对应的位置. 若t个位置的值均为1,则判断元素可能存在;若有任意一个位置为0,则可确定该元素不属于集合. 查询操作表示为
布隆过滤器的特点在于它支持快速插入和查询,但可能会产生误判,误判率P的计算式为
式中:n为插入的元素数,m为位数组长度,t为哈希函数个数. 本研究所提方案将为每个地图根据所用的定位接入点的信息构建特定的布隆过滤器,也将用户扫描获取的接入点信息进行哈希映射,通过与各地图布隆过滤器的匹配,实现用户在子地图中的局部定位,同时保护各地图指纹库中定位所用的接入点信息.
1.3. 同态加密算法
同态加密(homomorphic encryption, HE)是支持在密文上直接执行特定运算来获取明文运算结果的加密技术[18]. 根据支持运算类型的不同,同态加密分为半同态加密(partially homomorphic encryption, PHE)和全同态加密(fully homomorphic encryption, FHE). PHE的计算复杂度较低且实现相对简单,被较多应用于隐私计算场景. 常见的PHE算法有Paillier加密算法[19]与DGK加密算法[20]. 本研究选用Paillier加密算法进行数据加密保护. 该算法设有明文
2) 数乘同态性:
所提方案利用PHE对用户的请求定位指纹信息进行加密后,再由CSP在密文域执行有关计算.
2. 多地图室内定位系统模型
2.1. 方案架构
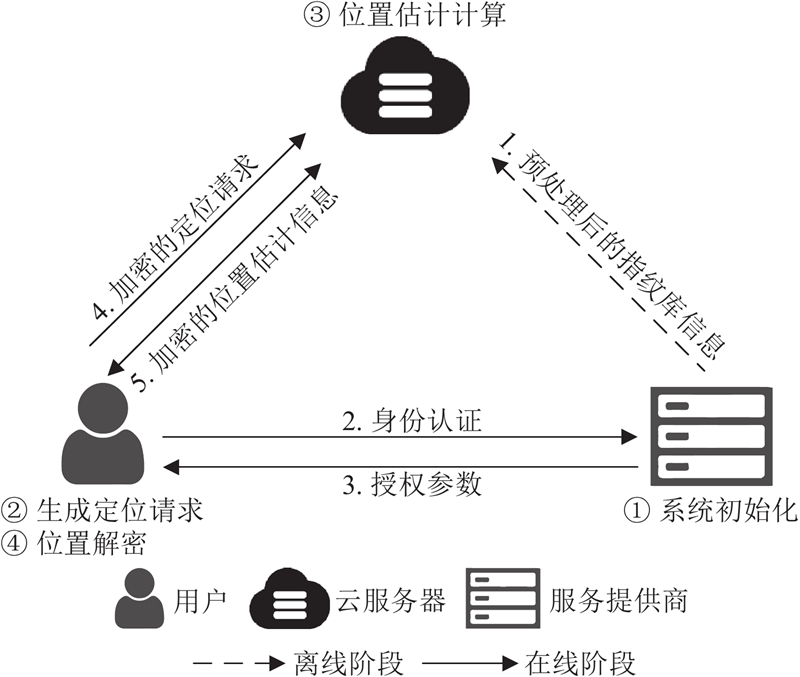
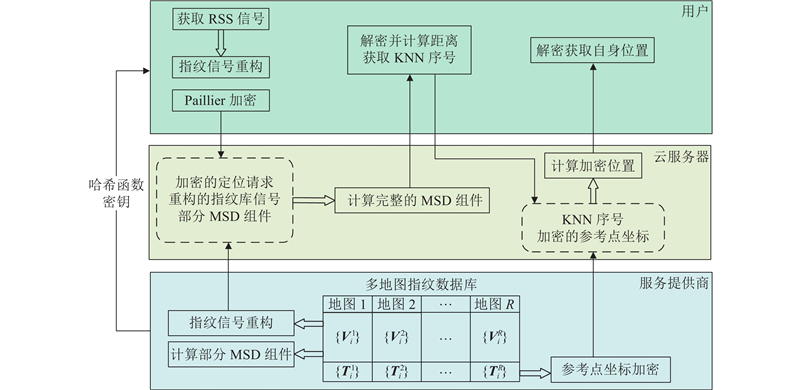
本研究提出的室内定位方案包含3个实体:用户、LSP与CSP,方案架构如图1所示. 1) LSP:定位服务资源的拥有者. 离线阶段,LSP执行系统初始化,对指纹库信息进行预处理,包括参考点坐标加密、指纹信号重构、地图布隆过滤器生成、部分MSD组件计算. 预处理完成后,将这些信息上传至CSP. 在线阶段,LSP授予可信用户授权参数,授权参数包含哈希函数集合
图 1
2.2. 攻击模型
在攻击模型中,不考虑窃听等被动攻击,而是基于实际应用场景设计隐私保护方案. 在本研究构建的模型中,数据拥有者LSP和定位协议执行者CSP均是半可信的,用户是不可信的. 从LSP的角度,CSP作为“诚实但好奇”的实体,按照设计的协议完成定位相关运算,但可能出于利益窃取LSP的指纹库信息进行分析;用户是不可信的,在获得系统授权完成定位时,也可能试图窃取LSP的隐私数据. 从用户的角度,LSP或外部攻击者可能从用户的位置请求数据中直接获取或推测用户的位置信息. 与现有的定位隐私保护方案一致[12-15],本研究不考虑合谋攻击. 原因是LSP作为定位服务商,从服务信誉、经济利益、技术及法律角度来看都不会与CSP合谋破坏用户的隐私安全.
2.3. 设计目标
为了抵御上述攻击者,保护用户与服务提供商的隐私数据,同时保证高效、准确地定位用户,所提方案应满足如下目标. 1) 安全性:方案应在不泄露任何指纹库中信息的条件下完成定位. 用户的指纹与位置信息不会泄露给任意一方. LSP中的数据不会受到恶意用户与CSP的攻击. 2) 定位准确性:与已有的定位算法相比,该方案不会显著降低定位精度. 3) 定位实时性:该方案应具有相对较小的计算与通信开销,能够满足实时在线定位的要求.
3. 云环境中的多地图室内定位隐私保护方案
3.1. 多地图粗定位
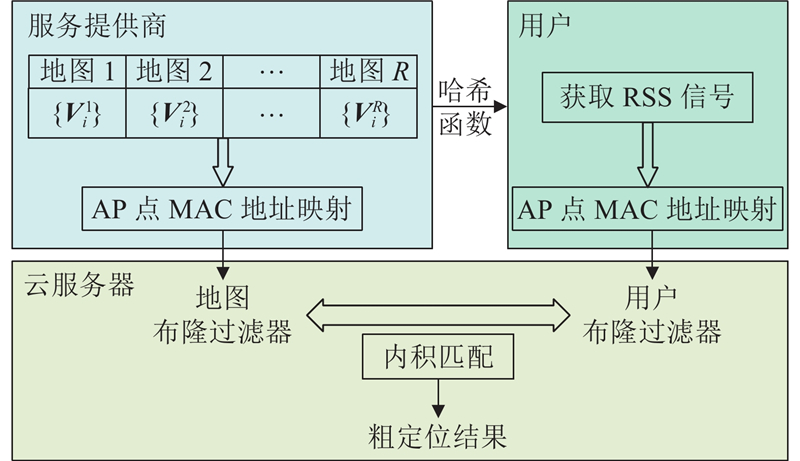
在室内Wi-Fi指纹定位中,不同地图的指纹库通常由不同的AP集合构成,因此AP的介质访问控制(media access control, MAC)地址具有地图特异性. 若能在不泄露具体AP信息的情况下完成用户与各地图AP特征的匹配,则可有效筛选出用户所处的子地图. 所提方案以布隆过滤器作为数据结构,利用哈希映射的方式为每个地图构建独特的AP特征指纹,实现AP完全匿名化的快速粗定位. 方案的流程如图2所示.
图 2
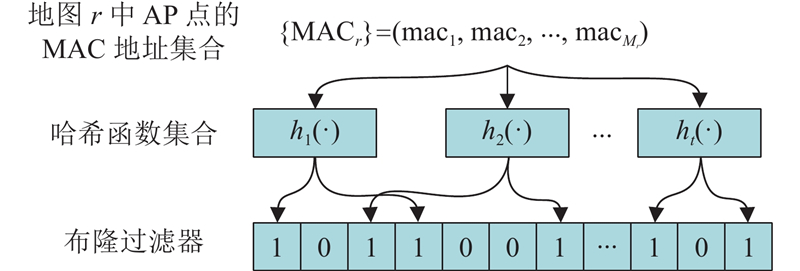
(1) LSP构建地图布隆过滤器. 假设LSP端存储R个地图的指纹库
图 3
(2) 用户构建位置请求布隆过滤器. 定位阶段,用户扫描自身附近的AP信号形成集合
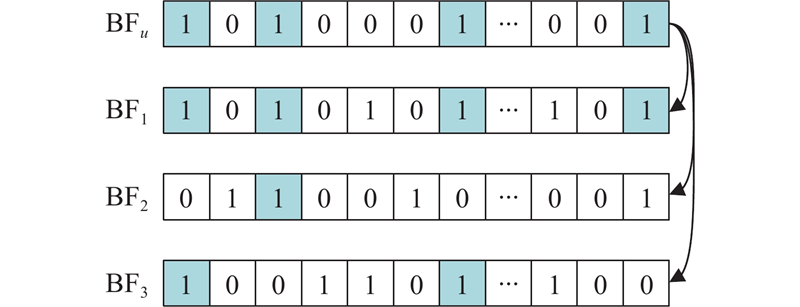
(3) CSP粗定位用户. CSP计算BFu与各个BFr的内积
图 4
3.2. 密文域精确定位
多地图粗定位后,CSP要在匹配的地图内对用户实现精确定位. 将Paillier同态加密与基于MSD的KNN定位算法结合,由CSP在密文域完成对用户的位置估计. 本研究设计安全的指纹信号重构技术,使用哈希映射将指纹库与用户信号模糊化,兼顾了计算效率与隐私保护的需求. 密文域精确定位流程如图5所示.
图 5
指纹的MSD计算式为
其中V、Q分别为指纹库内某一参考点与用户的指纹,令
算法1 指纹信号重构
输入:指纹信号V, MACr={mac1,mac2,
哈希函数
输出:重构后的信号
1 for r
2 for j
3 index
4
5 end for
6 end for
7 return
2) 用户生成定位请求:定位阶段,用户采集自身位置附近各AP的RSSI数值,利用从LSP获取的哈希函数
将其与从LSP处接收到的部分MSD组件构成完整的MSD组件{S1,E(S2),S4},发送给用户. 4) 用户解密并获取KNN序号:用户使用
并将结果E(xsum)、E(ysum)发送给用户. 6) 用户解密获得自身位置:用户用
3.3. 方案安全性分析
从LSP数据隐私与用户隐私2个方面进行方案的安全性分析.
3.3.1. 定位服务提供商数据隐私
LSP的数据信息包括参考点坐标和指纹信息. 先分析指纹信息的隐私. 所提方案通过2次哈希映射对指纹信息进行“去标识化”操作后外包给CSP. 粗定位阶段,将每个AP的MAC地址映射至布隆过滤器中,实现AP列表的隐匿. 精确定位阶段,将每个信号强度值映射到新的位置,打破了AP列表与信号强度值的关联性. 在保证哈希函数隐私性的条件下,CSP或攻击者无法从各地图的布隆过滤器与重构后的指纹推测任何指纹信息. 用户虽然会获得哈希函数,但不知道指纹向量的构建形式. CSP在定位交互中获得的S1和S4虽是明文形式,但这些是指纹向量各分量的和与平方和,不携带各AP的指纹信息. 因此,对于半可信用户,LSP的指纹信息是安全的. 恶意用户可能通过构建特定的定位请求向量,通过mN次定位请求从S2中获取重构后的指纹,m为重构后的指纹长度. 在构成指纹向量的AP集未知的情况下,这些指纹RSSI数据并无实际定位价值. 因此,对于恶意用户,LSP的指纹信息是安全的. 进一步,若恶意用户与CSP合谋,CSP可执行布隆过滤器的元素查询来尝试获得某个地图的定位AP集:
其中Ar为第r个地图所用的AP集. 这种暴力攻击的时间复杂度为O(2M·t),其中M为MAC地址的长度,t为哈希函数的个数. 由于布隆过滤器固有的误判率,CSP无法从获取的
3.3.2. 用户隐私
在整个定位阶段,CSP在粗定位阶段会获取用户所在的某一地图,在精确定位阶段会获取用户加密的指纹数据和最近邻序号. 由于LSP外包数据时参考点位置信息是加密的,CSP从某一地图号及最近邻序号并不能获取用户的地理区域. 符合语义安全的Paillier加密也保障了用户定位请求指纹的安全性.
4. 实验与分析
为了评估本方案的定位性能,选取3个在真实环境中采集的公开数据集构建多地图指纹库进行实验. 地图1来源于Miskolc[21]数据集中的2楼全部数据,包含711个参考点与32个AP,从中随机选取200个点作为测试点,每个测试点能接收的AP为9~15个. 地图2选用JUIndoorLoc[22]数据集中的4楼数据,该楼层包含172个AP信号,646个参考点,55个测试点,剔除68个未参与该楼层定位的AP信号,得到104个指纹信号维度,每个测试点能接收的AP为6~22个. 地图3选用UJIIndoorLoc[23]数据集中1号楼2层数据,该区域内包含1 396个参考点,87个测试点,参与定位的AP信号189个. 为了区分每个AP,实验中为每个AP赋予唯一的MAC地址作为标识.
4.1. 开销分析
如表1所示为在线阶段各方案的理论计算与通信开销. Exp与Mul分别为一次模幂与模乘的运算时间,Le为密文长度,L为用户接收到的AP信号个数,k为文献[13]方案中设置的匿名度,K为KNN算法中最近邻的个数,r与G分别为文献[15]中涉及的RSS值比特长度与在执行混淆电路及不经意传输时引入的通信开销. 考虑到重构指纹信号与生成布隆过滤器的耗时一般在毫秒级,布隆过滤器的匹配过程一般在微秒级,表中忽略了这2个部分的时间开销. 由表1可知,文献[13]方案的用户开销主要在于对k个匿名请求指纹的加密运算;文献[15]方案通过把所有计算外包给LSP和CSP,有效降低了对用户端的计算需求,但用户须通过获得地图参考点位置表完成自身位置估计,且对每个定位请求,LSP须通过混淆电路和不经意传输与CSP完成K最近邻的密文域选择,涉及大量的计算和通信. 与这2个方案相比,本研究所提方案中用户要承担较多的计算,但实现的用户的隐私强度高于文献[13]方案的k匿名,且定位阶段不需要LSP参与,实现了完整的计算外包. 此外,考虑到指纹定位中,计算与通信开销与参考点N与接入点个数M直接相关,所提方案在生成请求查询请求阶段,仅需要对用户能接收到的AP信号进行加密,其余未接收的AP位置(即信号强度为0的维度)通过填充加密零值完成向量构建. 通常在某一位置,可接收的AP信号数量远小于整个指纹库的AP总数M,因此这一设计减小了各阶段计算与通信开销.
表 1 隐私保护方案在线阶段的理论计算与通信开销
Tab.1
表 2 隐私保护方案在线阶段的平均计算与通信开销
Tab.2
4.2. 定位实验分析
4.2.1. 基于改进索伦森距离的KNN定位精度
图 6
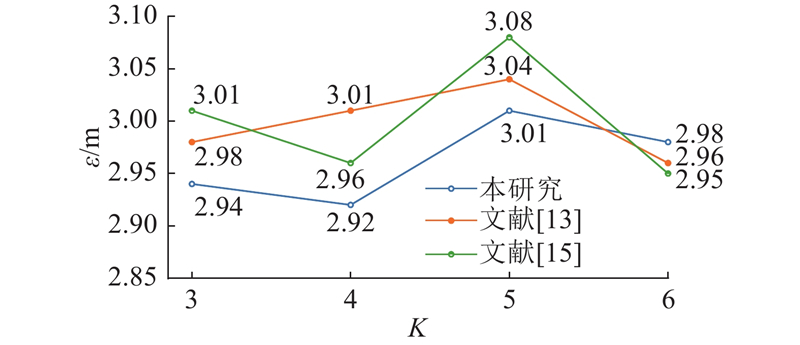
图 6 不同距离匹配方法定位误差随最近邻个数的变化
Fig.6 Variation of localization error with number of nearest neighbors for different distance matching methods
图 7
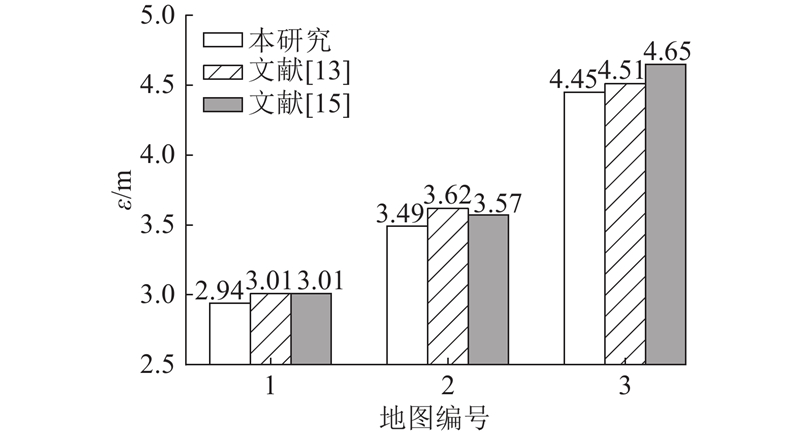
图 7 不同距离匹配方法的定位误差 (K = 4)
Fig.7 Localization error of different distance matching methods (K = 4)
4.2.2. 粗定位与精确定位的精度分析
粗定位阶段采用布隆过滤器之间的内积值作为匹配依据,其成功率P受布隆过滤器误判率的2个参数影响:长度l与哈希函数个数t. 如图8所示为设置不同l与t时,每个地图的粗定位成功率. 实验表明,哈希函数增多会造成粗定位准确率下降,且在每个地图上都呈现出这种趋势. 原因是哈希函数的增加会使地图布隆过滤器中“1”的个数显著增多,从而在内积匹配时造成误判. 随l的 增大,各地图的粗定位准确率均有所上升,并在l=250 bits时达到100%,这与布隆过滤器误判率的理论变化趋势一致. 因此在粗定位阶段,本研究使用l=250 bits、t=1作为布隆过滤器的参数组合. 进一步分析发现,地图3的粗定位准确率在各参数设置下始终最优. 原因是地图3的AP数量最多,构建布隆过滤器时插入的元素更多,布隆过滤器中“1”的分布更丰富且不易与其他地图产生随机重合,从而在内积匹配中展现出更强的特异性和判别能力. 用户在该区域接收到的AP更多来自该地图的已知接入点,使布隆过滤器之间的“1”位重合数量更大,与该地图的匹配度也更高.
图 8
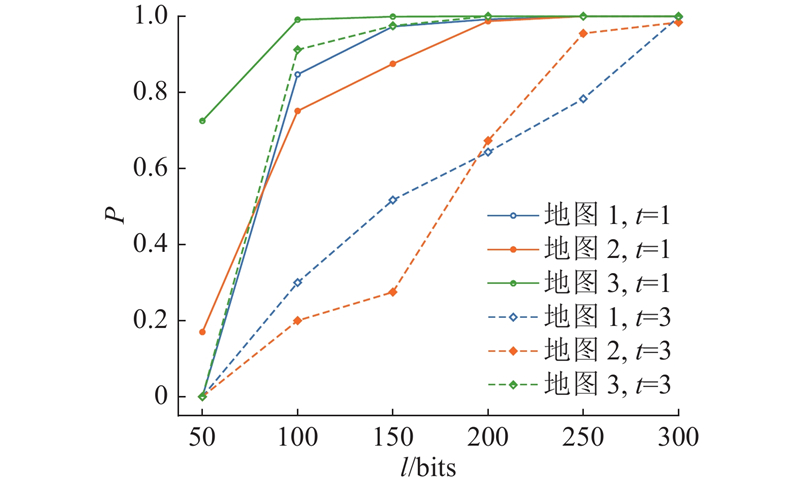
图 8 地图布隆过滤器长度与哈希函数个数对粗定位的影响
Fig.8 Effect of map bloom filter length and number of hash functions on coarse-grained localization
精确定位阶段采用MSD进行KNN匹配. 为了验证信号重构对定位精度
图 9
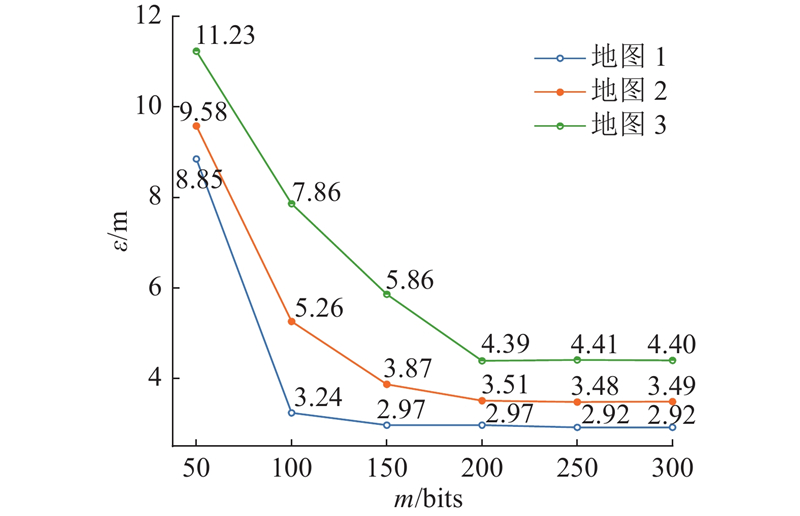
图 9 重构指纹长度对定位误差的影响
Fig.9 Effect of reconstructed fingerprint length on localization error
4.2.3. 方案的鲁棒性测试
在本方案中,由于哈希运算的引入,用户不需要知道指纹的具体构成信息,只需扫描自身可获取的AP即可完成对自身位置的估计. 在实际室内环境中,AP信号复杂多变,一些干扰的AP信号(如临时的手机热点信号)也会被用户接收之后参与定位过程的计算. 为了模拟用户在实际环境中接收到额外干扰信号时的定位情况,实验中向用户扫描的信号中分别加入3个和8个非定位AP的信号,并赋予随机的信号强度值,分析定位误差箱线图受干扰信号个数
图 10
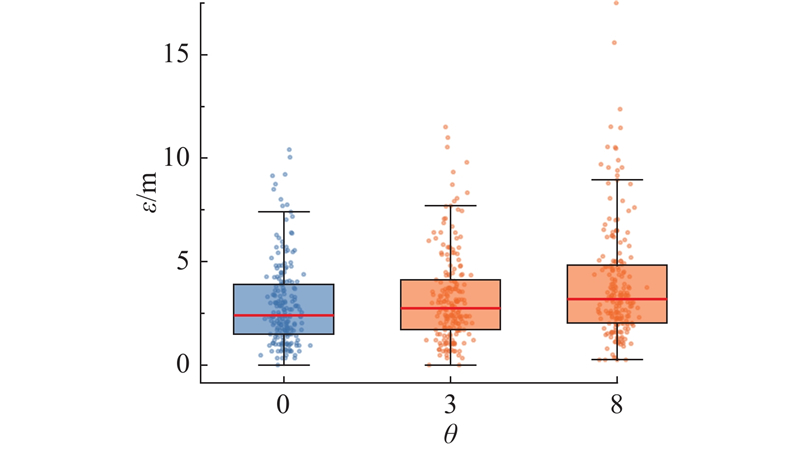
图 10 定位误差受干扰信号个数的影响
Fig.10 Effect of number of interfering signals on localization error
表 3 各地图中加入干扰信号后测试点的定位误差
Tab.3
| 地图编号 | ε/m | ||
| θ = 0 | θ = 3 | θ = 8 | |
| 1 | 2.92 | 3.24 | 3.89 |
| 2 | 3.48 | 3.90 | 4.51 |
| 3 | 4.39 | 4.88 | 5.30 |
5. 结 语
本研究针对云环境下多地图融合的室内定位场景,提出兼顾隐私保护与定位性能的解决方案. 通过将布隆过滤器与同态加密技术结合,实现多地图粗定位与密文域精确定位. 所提方案引入指纹信号重构,进一步提升了用户位置信息与LSP数据的隐私强度,采用改进的索伦森距离度量方法保证对用户的准确位置估计. 理论分析和真实数据集上的实验分析证明了所提方案的高效性和实时性,为高隐私需求的室内定位服务提供了新的解决方案. 本研究仍存在一定局限性. 1) 当前实验主要基于受控环境开展,尚未充分考虑人员移动、设备异构以及墙体遮挡等复杂动态因素对无线信号传播特性的影响. 未来将在更加复杂的真实室内环境(如大型商场、地下停车场)中采集多维度指纹数据,构建更贴近实际应用需求的多地图数据集,以进一步验证所提方案在复杂场景中的适应性与泛化能力. 2) 后续研究将探索融合超宽带、蓝牙、地磁等多模态传感器数据,构建多技术协同的室内定位模式,以弥补单一 Wi-Fi 指纹定位在信号稀疏或环境变化情况下的精度不足问题. 3) 将推动实际场景测试,为室内定位系统提供更加可复用、易部署的隐私保护技术方案.
参考文献
Protecting position privacy in range-based crowdsourcing cooperative localization
[J].DOI:10.1109/TNSE.2023.3321175 [本文引用: 1]
A review of indoor localization techniques and wireless technologies
[J].DOI:10.1007/s11277-021-08209-5 [本文引用: 1]
面向5G的定位技术研究综述
[J].
A survey of positioning technology for 5G
[J].
Bluetooth localization technology: principles, applications, and future trends
[J].DOI:10.1109/JIOT.2022.3203414 [本文引用: 1]
UWB indoor localization using deep learning LSTM networks
[J].DOI:10.3390/app10186290 [本文引用: 1]
室内定位隐私保护综述
[J].
Survey on privacy protection indoor positioning
[J].
A systematic literature review on cloud computing security: threats and mitigation strategies
[J].DOI:10.1109/ACCESS.2021.3073203 [本文引用: 1]
基于匿名指纹集的室内指纹定位隐私保护算法
[J].
Anonymous fingerprint set based privacy preserving scheme for indoor localization
[J].
DP3: a differential privacy-based privacy-preserving indoor localization mechanism
[J].DOI:10.1109/LCOMM.2018.2876449 [本文引用: 1]
边缘计算下指纹室内定位差分私有联邦学习模型
[J].DOI:10.7544/issn1000-1239.20210270 [本文引用: 1]
A differentially private federated learning model for fingerprinting indoor localization in edge computing
[J].DOI:10.7544/issn1000-1239.20210270 [本文引用: 1]
安全高效的多用户室内指纹定位方案
[J].
Secure and efficient multi-user indoor fingerprinting localization with access control
[J].
基于Wi-Fi指纹且计算外包的室内定位隐私保护方案
[J].DOI:10.11959/j.issn.1000-436x.2024051 [本文引用: 14]
Privacy-preserving indoor localization scheme based on Wi-Fi fingerprint with outsourced computing
[J].DOI:10.11959/j.issn.1000-436x.2024051 [本文引用: 14]
Privacy-preserving WiFi localization based on inner product encryption in a cloud environment
[J].DOI:10.1109/JIOT.2024.3358349 [本文引用: 2]
A cryptographic protocol for efficient mutual location privacy through outsourcing in indoor Wi-Fi localization
[J].DOI:10.1109/TIFS.2024.3372805 [本文引用: 12]
Optimizing bloom filter: challenges, solutions, and comparisons
[J].DOI:10.1109/COMST.2018.2889329 [本文引用: 1]
Survey on fully homomorphic encryption, theory, and applications
[J].DOI:10.1109/JPROC.2022.3205665 [本文引用: 1]
JUIndoorLoc: a ubiquitous framework for smartphone-based indoor localization subject to context and device heterogeneity
[J].DOI:10.1007/s11277-019-06188-2 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}