Alarm-based predictive maintenance scheduling for aircraft engines with imperfect remaining useful life prognostics
1
2022
... 航空发动机作为飞机的关键部件,在极端苛刻的工况下必须保持高度稳定和可靠的性能,以保证飞机的安全性和运行效率[1 -2 ] . 确保发动机能在持续高速运转中承受高温高压及强烈振动的同时维持良好状态,避免因意外故障带来的高昂维修费用,对预测航空发动机精确的剩余使用寿命(remaining useful life, RUL)至关重要. 此技术通过科学方法精确估计航空发动机在当前状态下维持预期功能直至需要进行维护或更换的时间窗口[3 -4 ] . ...
基于长序列的航空发动机剩余使用寿命预测方法
1
2024
... 航空发动机作为飞机的关键部件,在极端苛刻的工况下必须保持高度稳定和可靠的性能,以保证飞机的安全性和运行效率[1 -2 ] . 确保发动机能在持续高速运转中承受高温高压及强烈振动的同时维持良好状态,避免因意外故障带来的高昂维修费用,对预测航空发动机精确的剩余使用寿命(remaining useful life, RUL)至关重要. 此技术通过科学方法精确估计航空发动机在当前状态下维持预期功能直至需要进行维护或更换的时间窗口[3 -4 ] . ...
基于长序列的航空发动机剩余使用寿命预测方法
1
2024
... 航空发动机作为飞机的关键部件,在极端苛刻的工况下必须保持高度稳定和可靠的性能,以保证飞机的安全性和运行效率[1 -2 ] . 确保发动机能在持续高速运转中承受高温高压及强烈振动的同时维持良好状态,避免因意外故障带来的高昂维修费用,对预测航空发动机精确的剩余使用寿命(remaining useful life, RUL)至关重要. 此技术通过科学方法精确估计航空发动机在当前状态下维持预期功能直至需要进行维护或更换的时间窗口[3 -4 ] . ...
Prognosis of dynamical system components with varying degradation patterns using model–data–fusion
1
2021
... 航空发动机作为飞机的关键部件,在极端苛刻的工况下必须保持高度稳定和可靠的性能,以保证飞机的安全性和运行效率[1 -2 ] . 确保发动机能在持续高速运转中承受高温高压及强烈振动的同时维持良好状态,避免因意外故障带来的高昂维修费用,对预测航空发动机精确的剩余使用寿命(remaining useful life, RUL)至关重要. 此技术通过科学方法精确估计航空发动机在当前状态下维持预期功能直至需要进行维护或更换的时间窗口[3 -4 ] . ...
Multicellular LSTM-based deep learning model for aero-engine remaining useful life prediction
1
2021
... 航空发动机作为飞机的关键部件,在极端苛刻的工况下必须保持高度稳定和可靠的性能,以保证飞机的安全性和运行效率[1 -2 ] . 确保发动机能在持续高速运转中承受高温高压及强烈振动的同时维持良好状态,避免因意外故障带来的高昂维修费用,对预测航空发动机精确的剩余使用寿命(remaining useful life, RUL)至关重要. 此技术通过科学方法精确估计航空发动机在当前状态下维持预期功能直至需要进行维护或更换的时间窗口[3 -4 ] . ...
Wiener degradation models with scale-mixture normal distributed measurement errors for RUL prediction
1
2022
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
RUL prediction based on two-phase Wiener process
0
2022
Research on rolling bearing state health monitoring and life prediction based on PCA and Internet of Things with multi-sensor
1
2020
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
Probabilistic deep learning methodology for uncertainty quantification of remaining useful lifetime of multi-component systems
1
2022
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
An enhanced deep learning-based fusion prognostic method for RUL prediction
0
2020
RUL prediction of machinery using convolutional-vector fusion network through multi-feature dynamic weighting
1
2023
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
State-of-health estimation and remaining useful life prediction for lithium-ion batteries based on an improved particle filter algorithm
1
2023
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
Remaining useful life prediction of lithium-ion batteries based on Wiener process under time-varying temperature condition
1
2021
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
Variational encoding based on factorized temporal-channel fusion and feature fusion for interpretable remaining useful life prediction
1
2024
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
基于多尺度特征与注意力机制的轴承寿命预测
1
2022
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
基于多尺度特征与注意力机制的轴承寿命预测
1
2022
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
An attention-based temporal convolutional network method for predicting remaining useful life of aero-engine
6
2024
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
... [15 -16 ,21 -23 ]所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
... 在4个子数据集上将所提方法与现有的6种先进方法进行对比实验,为了减少随机性的影响,以5次实验的均值作为最终的实验结果. 6种先进方法包括1) Double-Attn[17 ] :利用基于通道注意力的CNN将更大的权重应用于更重要的传感器,使用Transformer将注意力集中在关键时间步的特征上,使用全连接层预测RUL. 2) CATA-TCN[21 ] :利用基于通道注意力和时间注意力机制的时间卷积网络的双重注意力框架,分别关注来自不同传感器和不同时间步长的更关键的信息. 3) MSDCNN-LSTM[28 ] :结合多尺度深度卷积神经网络和长短期记忆的混合模型提取数据中的高级空间特征和长期时间相关特征. 4)MHT[29 ] :基于一维卷积神经网络设计的沙漏型多尺度特征提取器,将时间序列缩放为多时间尺度进行特征融合,利用Transformer进一步从融合特征中提取特征并输出RUL. 5)ATCN[15 ] :将改进的自注意力机制和挤压激励机制与时间卷积网络结合,双注意力机制设计用来衡量输入数据中不同传感器和时间步长的不同贡献. 6) TATFA-Transformer[19 ] :采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系. ...
... Comparison of evaluation indicators of different prediction methods in four sub-datasets
Tab.4 网络 RMSE θ FD001 FD002 FD003 FD004 FD001 FD002 FD003 FD004 Double-Attn[17 ] 12.25 17.08 13.39 19.86 198.00 1575.00 290.00 1741.00 CATA-TCN[21 ] 12.80 17.61 13.16 21.04 234.31 1361.23 290.63 2303.42 MSDCNN-LSTM[28 ] 12.96 18.70 11.78 21.57 256.59 1873.86 211.99 2699.34 MHT[29 ] 11.92 13.70 10.63 17.73 215.20 746.70 150.50 1572.00 ATCN[15 ] 11.48 15.82 11.34 17.80 194.25 1210.57 249.19 1934.86 TATFA-Transformer[19 ] 12.21 15.07 11.23 18.81 261.50 1359.70 210.21 2506.35 本研究 11.38 12.76 11.81 14.58 192.40 629.61 218.85 908.58
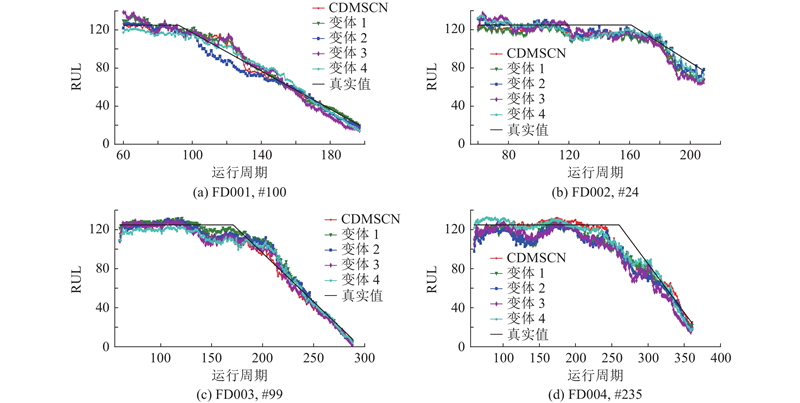
2.5. 消融实验 2.5.1. 跨维度多尺度卷积网络的性能及效果验证 为了验证CDMSCN各组成部分的必要性和有效性,如表5 所示,推导出4个不同的变体:无通道注意力的变体1,采用文献[15 ]中挤压-激励机制的变体2,无多尺度时间依赖模块的变体3,无通道依赖模块的变体4. 所有变体的性能评价指标对比结果如表6 所示,可以看出,当模型集成所有子模块时,性能达到最佳. 1)通道注意力模块的影响:在所有子数据集中,具有通道注意力模块的CDMSCN在2个评价指标上均优于去除或替换该机制的网络变体. 特别是,变体1与变体2相比,性能下降更加显著,这表明通道注意力在模型预测中的作用. 变体2的表现证明本研究提出的通道注意力机制能够有效避免在时间尺度平均化过程中丢失关键时间信息,更适合于RUL预测任务. 2)多尺度时间依赖模块的影响:缺失多尺度时间依赖模块的变体3在性能上相比变体1和变体4有显著下降,说明多尺度时间依赖模块在整体模型中的核心作用. 与变量和通道维度相比,时间维度信息对于RUL预测更为关键. 3)通道依赖模块的影响:引入通道依赖模块的CDMSCN在2个评价指标上均优于未使用该模块的变体. 通道依赖模块通过提取通道维度的特征,帮助模型更有效地识别数据中的抽象特征,显著提高了模型的泛化能力和整体性能. ...
... 为了验证CDMSCN各组成部分的必要性和有效性,如表5 所示,推导出4个不同的变体:无通道注意力的变体1,采用文献[15 ]中挤压-激励机制的变体2,无多尺度时间依赖模块的变体3,无通道依赖模块的变体4. 所有变体的性能评价指标对比结果如表6 所示,可以看出,当模型集成所有子模块时,性能达到最佳. 1)通道注意力模块的影响:在所有子数据集中,具有通道注意力模块的CDMSCN在2个评价指标上均优于去除或替换该机制的网络变体. 特别是,变体1与变体2相比,性能下降更加显著,这表明通道注意力在模型预测中的作用. 变体2的表现证明本研究提出的通道注意力机制能够有效避免在时间尺度平均化过程中丢失关键时间信息,更适合于RUL预测任务. 2)多尺度时间依赖模块的影响:缺失多尺度时间依赖模块的变体3在性能上相比变体1和变体4有显著下降,说明多尺度时间依赖模块在整体模型中的核心作用. 与变量和通道维度相比,时间维度信息对于RUL预测更为关键. 3)通道依赖模块的影响:引入通道依赖模块的CDMSCN在2个评价指标上均优于未使用该模块的变体. 通道依赖模块通过提取通道维度的特征,帮助模型更有效地识别数据中的抽象特征,显著提高了模型的泛化能力和整体性能. ...
... Cross-dimensional multi-scale convolutional network and its variants
Tab.5 名称 通道注意力模块 多尺度时间依赖模块 通道依赖模块 CDMSCN √ √ √ 变体1 — √ √ 变体2 挤压-激励机制[15 ] √ √ 变体3 √ — √ 变体4 √ √ —
表 6 跨维度多尺度卷积网络及其变体的性能对比 ...
An adaptive and dynamical neural network for machine remaining useful life prediction
2
2024
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
... -16 ,21 -23 ]所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
Aircraft engine remaining useful life estimation via a double attention-based data-driven architecture
3
2022
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
... 在4个子数据集上将所提方法与现有的6种先进方法进行对比实验,为了减少随机性的影响,以5次实验的均值作为最终的实验结果. 6种先进方法包括1) Double-Attn[17 ] :利用基于通道注意力的CNN将更大的权重应用于更重要的传感器,使用Transformer将注意力集中在关键时间步的特征上,使用全连接层预测RUL. 2) CATA-TCN[21 ] :利用基于通道注意力和时间注意力机制的时间卷积网络的双重注意力框架,分别关注来自不同传感器和不同时间步长的更关键的信息. 3) MSDCNN-LSTM[28 ] :结合多尺度深度卷积神经网络和长短期记忆的混合模型提取数据中的高级空间特征和长期时间相关特征. 4)MHT[29 ] :基于一维卷积神经网络设计的沙漏型多尺度特征提取器,将时间序列缩放为多时间尺度进行特征融合,利用Transformer进一步从融合特征中提取特征并输出RUL. 5)ATCN[15 ] :将改进的自注意力机制和挤压激励机制与时间卷积网络结合,双注意力机制设计用来衡量输入数据中不同传感器和时间步长的不同贡献. 6) TATFA-Transformer[19 ] :采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系. ...
... Comparison of evaluation indicators of different prediction methods in four sub-datasets
Tab.4 网络 RMSE θ FD001 FD002 FD003 FD004 FD001 FD002 FD003 FD004 Double-Attn[17 ] 12.25 17.08 13.39 19.86 198.00 1575.00 290.00 1741.00 CATA-TCN[21 ] 12.80 17.61 13.16 21.04 234.31 1361.23 290.63 2303.42 MSDCNN-LSTM[28 ] 12.96 18.70 11.78 21.57 256.59 1873.86 211.99 2699.34 MHT[29 ] 11.92 13.70 10.63 17.73 215.20 746.70 150.50 1572.00 ATCN[15 ] 11.48 15.82 11.34 17.80 194.25 1210.57 249.19 1934.86 TATFA-Transformer[19 ] 12.21 15.07 11.23 18.81 261.50 1359.70 210.21 2506.35 本研究 11.38 12.76 11.81 14.58 192.40 629.61 218.85 908.58
2.5. 消融实验 2.5.1. 跨维度多尺度卷积网络的性能及效果验证 为了验证CDMSCN各组成部分的必要性和有效性,如表5 所示,推导出4个不同的变体:无通道注意力的变体1,采用文献[15 ]中挤压-激励机制的变体2,无多尺度时间依赖模块的变体3,无通道依赖模块的变体4. 所有变体的性能评价指标对比结果如表6 所示,可以看出,当模型集成所有子模块时,性能达到最佳. 1)通道注意力模块的影响:在所有子数据集中,具有通道注意力模块的CDMSCN在2个评价指标上均优于去除或替换该机制的网络变体. 特别是,变体1与变体2相比,性能下降更加显著,这表明通道注意力在模型预测中的作用. 变体2的表现证明本研究提出的通道注意力机制能够有效避免在时间尺度平均化过程中丢失关键时间信息,更适合于RUL预测任务. 2)多尺度时间依赖模块的影响:缺失多尺度时间依赖模块的变体3在性能上相比变体1和变体4有显著下降,说明多尺度时间依赖模块在整体模型中的核心作用. 与变量和通道维度相比,时间维度信息对于RUL预测更为关键. 3)通道依赖模块的影响:引入通道依赖模块的CDMSCN在2个评价指标上均优于未使用该模块的变体. 通道依赖模块通过提取通道维度的特征,帮助模型更有效地识别数据中的抽象特征,显著提高了模型的泛化能力和整体性能. ...
Remaining useful life prediction using multi-scale deep convolutional neural network
1
2020
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
A regularized constrained two-stream convolution augmented Transformer for aircraft engine remaining useful life prediction
3
2024
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
... 在4个子数据集上将所提方法与现有的6种先进方法进行对比实验,为了减少随机性的影响,以5次实验的均值作为最终的实验结果. 6种先进方法包括1) Double-Attn[17 ] :利用基于通道注意力的CNN将更大的权重应用于更重要的传感器,使用Transformer将注意力集中在关键时间步的特征上,使用全连接层预测RUL. 2) CATA-TCN[21 ] :利用基于通道注意力和时间注意力机制的时间卷积网络的双重注意力框架,分别关注来自不同传感器和不同时间步长的更关键的信息. 3) MSDCNN-LSTM[28 ] :结合多尺度深度卷积神经网络和长短期记忆的混合模型提取数据中的高级空间特征和长期时间相关特征. 4)MHT[29 ] :基于一维卷积神经网络设计的沙漏型多尺度特征提取器,将时间序列缩放为多时间尺度进行特征融合,利用Transformer进一步从融合特征中提取特征并输出RUL. 5)ATCN[15 ] :将改进的自注意力机制和挤压激励机制与时间卷积网络结合,双注意力机制设计用来衡量输入数据中不同传感器和时间步长的不同贡献. 6) TATFA-Transformer[19 ] :采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系. ...
... Comparison of evaluation indicators of different prediction methods in four sub-datasets
Tab.4 网络 RMSE θ FD001 FD002 FD003 FD004 FD001 FD002 FD003 FD004 Double-Attn[17 ] 12.25 17.08 13.39 19.86 198.00 1575.00 290.00 1741.00 CATA-TCN[21 ] 12.80 17.61 13.16 21.04 234.31 1361.23 290.63 2303.42 MSDCNN-LSTM[28 ] 12.96 18.70 11.78 21.57 256.59 1873.86 211.99 2699.34 MHT[29 ] 11.92 13.70 10.63 17.73 215.20 746.70 150.50 1572.00 ATCN[15 ] 11.48 15.82 11.34 17.80 194.25 1210.57 249.19 1934.86 TATFA-Transformer[19 ] 12.21 15.07 11.23 18.81 261.50 1359.70 210.21 2506.35 本研究 11.38 12.76 11.81 14.58 192.40 629.61 218.85 908.58
2.5. 消融实验 2.5.1. 跨维度多尺度卷积网络的性能及效果验证 为了验证CDMSCN各组成部分的必要性和有效性,如表5 所示,推导出4个不同的变体:无通道注意力的变体1,采用文献[15 ]中挤压-激励机制的变体2,无多尺度时间依赖模块的变体3,无通道依赖模块的变体4. 所有变体的性能评价指标对比结果如表6 所示,可以看出,当模型集成所有子模块时,性能达到最佳. 1)通道注意力模块的影响:在所有子数据集中,具有通道注意力模块的CDMSCN在2个评价指标上均优于去除或替换该机制的网络变体. 特别是,变体1与变体2相比,性能下降更加显著,这表明通道注意力在模型预测中的作用. 变体2的表现证明本研究提出的通道注意力机制能够有效避免在时间尺度平均化过程中丢失关键时间信息,更适合于RUL预测任务. 2)多尺度时间依赖模块的影响:缺失多尺度时间依赖模块的变体3在性能上相比变体1和变体4有显著下降,说明多尺度时间依赖模块在整体模型中的核心作用. 与变量和通道维度相比,时间维度信息对于RUL预测更为关键. 3)通道依赖模块的影响:引入通道依赖模块的CDMSCN在2个评价指标上均优于未使用该模块的变体. 通道依赖模块通过提取通道维度的特征,帮助模型更有效地识别数据中的抽象特征,显著提高了模型的泛化能力和整体性能. ...
Trend-augmented and temporal-featured Transformer network with multi-sensor signals for remaining useful life prediction
1
2024
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
Channel attention & temporal attention based temporal convolutional network: a dual attention framework for remaining useful life prediction of the aircraft engines
4
2024
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
... ,21 -23 ]所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
... 在4个子数据集上将所提方法与现有的6种先进方法进行对比实验,为了减少随机性的影响,以5次实验的均值作为最终的实验结果. 6种先进方法包括1) Double-Attn[17 ] :利用基于通道注意力的CNN将更大的权重应用于更重要的传感器,使用Transformer将注意力集中在关键时间步的特征上,使用全连接层预测RUL. 2) CATA-TCN[21 ] :利用基于通道注意力和时间注意力机制的时间卷积网络的双重注意力框架,分别关注来自不同传感器和不同时间步长的更关键的信息. 3) MSDCNN-LSTM[28 ] :结合多尺度深度卷积神经网络和长短期记忆的混合模型提取数据中的高级空间特征和长期时间相关特征. 4)MHT[29 ] :基于一维卷积神经网络设计的沙漏型多尺度特征提取器,将时间序列缩放为多时间尺度进行特征融合,利用Transformer进一步从融合特征中提取特征并输出RUL. 5)ATCN[15 ] :将改进的自注意力机制和挤压激励机制与时间卷积网络结合,双注意力机制设计用来衡量输入数据中不同传感器和时间步长的不同贡献. 6) TATFA-Transformer[19 ] :采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系. ...
... Comparison of evaluation indicators of different prediction methods in four sub-datasets
Tab.4 网络 RMSE θ FD001 FD002 FD003 FD004 FD001 FD002 FD003 FD004 Double-Attn[17 ] 12.25 17.08 13.39 19.86 198.00 1575.00 290.00 1741.00 CATA-TCN[21 ] 12.80 17.61 13.16 21.04 234.31 1361.23 290.63 2303.42 MSDCNN-LSTM[28 ] 12.96 18.70 11.78 21.57 256.59 1873.86 211.99 2699.34 MHT[29 ] 11.92 13.70 10.63 17.73 215.20 746.70 150.50 1572.00 ATCN[15 ] 11.48 15.82 11.34 17.80 194.25 1210.57 249.19 1934.86 TATFA-Transformer[19 ] 12.21 15.07 11.23 18.81 261.50 1359.70 210.21 2506.35 本研究 11.38 12.76 11.81 14.58 192.40 629.61 218.85 908.58
2.5. 消融实验 2.5.1. 跨维度多尺度卷积网络的性能及效果验证 为了验证CDMSCN各组成部分的必要性和有效性,如表5 所示,推导出4个不同的变体:无通道注意力的变体1,采用文献[15 ]中挤压-激励机制的变体2,无多尺度时间依赖模块的变体3,无通道依赖模块的变体4. 所有变体的性能评价指标对比结果如表6 所示,可以看出,当模型集成所有子模块时,性能达到最佳. 1)通道注意力模块的影响:在所有子数据集中,具有通道注意力模块的CDMSCN在2个评价指标上均优于去除或替换该机制的网络变体. 特别是,变体1与变体2相比,性能下降更加显著,这表明通道注意力在模型预测中的作用. 变体2的表现证明本研究提出的通道注意力机制能够有效避免在时间尺度平均化过程中丢失关键时间信息,更适合于RUL预测任务. 2)多尺度时间依赖模块的影响:缺失多尺度时间依赖模块的变体3在性能上相比变体1和变体4有显著下降,说明多尺度时间依赖模块在整体模型中的核心作用. 与变量和通道维度相比,时间维度信息对于RUL预测更为关键. 3)通道依赖模块的影响:引入通道依赖模块的CDMSCN在2个评价指标上均优于未使用该模块的变体. 通道依赖模块通过提取通道维度的特征,帮助模型更有效地识别数据中的抽象特征,显著提高了模型的泛化能力和整体性能. ...
基于特征注意力机制的GRU-GAN航空发动机剩余寿命预测
0
2022
基于特征注意力机制的GRU-GAN航空发动机剩余寿命预测
0
2022
Distributed attention-based temporal convolutional network for remaining useful life prediction
1
2021
... 现有的航空发动机RUL预测技术主要划分为2个大类:基于物理模型[5 -7 ] 和基于数据驱动的方法[8 -10 ] . 在基于物理模型的方法中,模型通常基于对系统的物理过程的理解而构建. Hong等[11 ] 提出改进的粒子滤波方法,结合递推最小二乘算法进行在线容量估计和离线RUL预测;Xu等[12 ] 利用Arrhenius模型和Wiener过程构建RUL预测框架,取得了良好的RUL预测精度. 这些方法得益于对系统退化的全面理解,由于航空发动机结构精密复杂,其性能演变涉及从生产制造至实际服役过程中遭遇的各种化学反应、物理变化以及气动热力交互作用,多因素交织带来的不确定性使构建精确且全面的物理模型变得非常困难[13 -14 ] . 数据驱动的方法避免了对设备内部复杂且动态的物理失效机理的深入探究,不仅保证了预测精度,还降低了预测成本,展现出良好的模型泛化能力. 在数据驱动的方法中,基于深度学习的预测方法可以直接建模复杂非线性系统,自动挖掘数据与预测目标的深层映射. 为了提高RUL预测性能,Zhang等[15 ] 利用基于注意力的时间卷积网络与挤压-激励机制获取不同时间步长和传感器对RUL预测任务的贡献. Jin等[16 ] 结合可变形卷积和通道注意力机制进行健康指标预测. Liu等[17 ] 开发出基于双重注意力机制的网络模型,有效整合信号的变量依赖性和时间信息以预测RUL. Li等[18 ] 提出多尺度深度卷积神经网络,用以提取多尺度特征信息,从而提高RUL预测的准确性. Zhu等[19 ] 提出基于并行多尺度卷积神经网络和Transformer串联组合的RUL预测网络,实现时间序列中不同时间步长和传感器特征的同步提取. Zhang等[20 ] 采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系,从而提升RUL预测的精度. Lin等[21 ] 开发出融合通道注意力和时间注意力的时间卷积网络,用于RUL预测. 以上深度学习方法有较好的发动机RUL预测效果,但仍存在局限性. 1)以往研究通常量化并利用数据中的时间动态依赖性及传感器间的相关性以优化模型预测性能,通常会忽略原始数据深层结构中隐藏特征的影响. 2)Zhang等[15 -16 ,21 -23 ] 所提方法在衡量不同传感器对RUL预测任务的贡献时使用全局平均池化操作,往往会丢失关键的细节信息. 3)卷积神经网络处理特定时间步的表征学习能力受限于卷积核尺寸和网络深度,在处理长距离时间序列时,网络对远距离元素间的潜在关系建模能力有限. ...
2
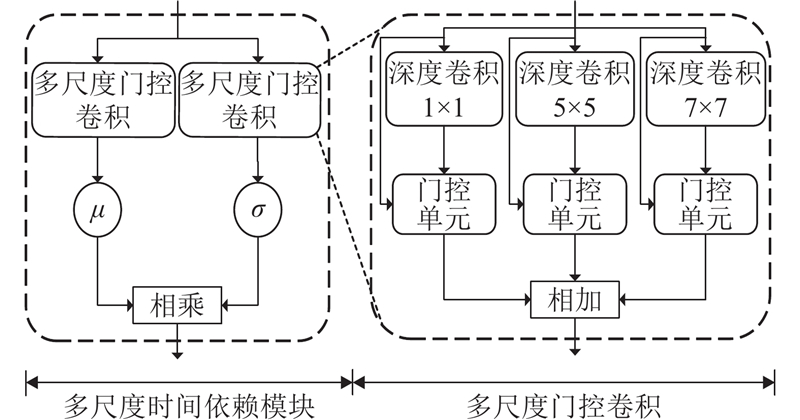
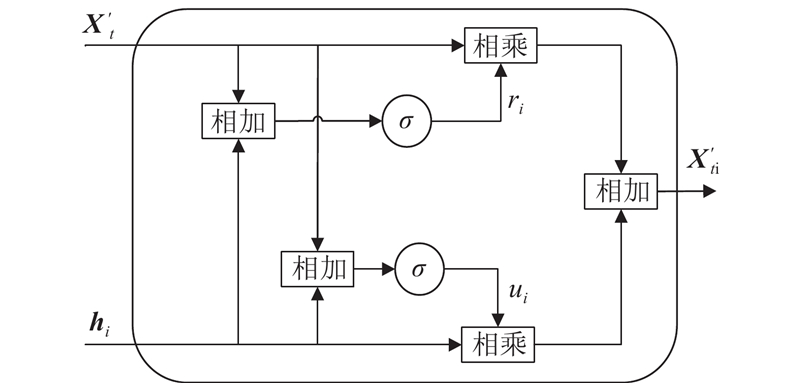
... 多尺度门控卷积的具体操作:将输入$ {\boldsymbol{X}}_{{t}}^{'} $ [24 ] 中,提取不同尺度的时间特征$ {{\boldsymbol{h}}_i} $ ( i =1,2,3). 为了最大化卷积网络对局部上下文的敏感性,引入文献[25 ]中的门控单元. 在多尺度卷积运算后添加门控单元,以强调局部上下文的贡献. 如图5 所示,门控单元包括更新门和重置门2个部分,重置门使得网络在卷积操作后能够重新读取原始输入信息,更新门负责利用局部上下文信息来控制特征的流动量. 将深度卷积的输入$ {\boldsymbol{X}}_{{t}}^{'} $ $ {h_i} $
... 在得到跨变量依赖性和跨时间依赖性后,使用2个连续的逐点组卷积[24 ] 来捕获每个变量在通道维度上的隐藏特征表示,过程表达式为 ...
Remaining useful life estimation via transformer encoder enhanced by a gated convolutional unit
1
2021
... 多尺度门控卷积的具体操作:将输入$ {\boldsymbol{X}}_{{t}}^{'} $ [24 ] 中,提取不同尺度的时间特征$ {{\boldsymbol{h}}_i} $ ( i =1,2,3). 为了最大化卷积网络对局部上下文的敏感性,引入文献[25 ]中的门控单元. 在多尺度卷积运算后添加门控单元,以强调局部上下文的贡献. 如图5 所示,门控单元包括更新门和重置门2个部分,重置门使得网络在卷积操作后能够重新读取原始输入信息,更新门负责利用局部上下文信息来控制特征的流动量. 将深度卷积的输入$ {\boldsymbol{X}}_{{t}}^{'} $ $ {h_i} $
KDnet-RUL: a knowledge distillation framework to compress deep neural networks for machine remaining useful life prediction
1
2022
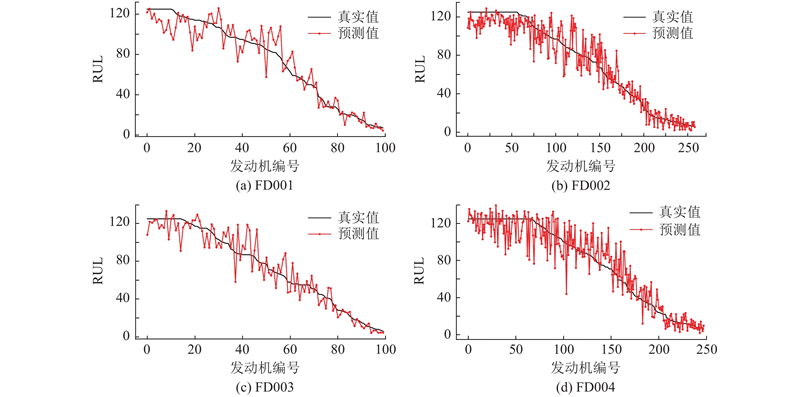
... RUL标签的有效建模会影响模型的预测精度. 为了比较不同的研究方法,采用如图7 所示的分段线性退化函数来拟合发动机使用时间与RUL的关系. 在分段线性规则中,假设先前发动机的RUL在运行开始时保持不变,然后线性退化直到发生故障,基于文献[26 ]、[27 ],设定RUL最大值为125个运行周期. ...
A bidirectional LSTM prognostics method under multiple operational conditions
1
2019
... RUL标签的有效建模会影响模型的预测精度. 为了比较不同的研究方法,采用如图7 所示的分段线性退化函数来拟合发动机使用时间与RUL的关系. 在分段线性规则中,假设先前发动机的RUL在运行开始时保持不变,然后线性退化直到发生故障,基于文献[26 ]、[27 ],设定RUL最大值为125个运行周期. ...
Multi-scale memory-enhanced method for predicting the remaining useful life of aircraft engines
2
2023
... 在4个子数据集上将所提方法与现有的6种先进方法进行对比实验,为了减少随机性的影响,以5次实验的均值作为最终的实验结果. 6种先进方法包括1) Double-Attn[17 ] :利用基于通道注意力的CNN将更大的权重应用于更重要的传感器,使用Transformer将注意力集中在关键时间步的特征上,使用全连接层预测RUL. 2) CATA-TCN[21 ] :利用基于通道注意力和时间注意力机制的时间卷积网络的双重注意力框架,分别关注来自不同传感器和不同时间步长的更关键的信息. 3) MSDCNN-LSTM[28 ] :结合多尺度深度卷积神经网络和长短期记忆的混合模型提取数据中的高级空间特征和长期时间相关特征. 4)MHT[29 ] :基于一维卷积神经网络设计的沙漏型多尺度特征提取器,将时间序列缩放为多时间尺度进行特征融合,利用Transformer进一步从融合特征中提取特征并输出RUL. 5)ATCN[15 ] :将改进的自注意力机制和挤压激励机制与时间卷积网络结合,双注意力机制设计用来衡量输入数据中不同传感器和时间步长的不同贡献. 6) TATFA-Transformer[19 ] :采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系. ...
... Comparison of evaluation indicators of different prediction methods in four sub-datasets
Tab.4 网络 RMSE θ FD001 FD002 FD003 FD004 FD001 FD002 FD003 FD004 Double-Attn[17 ] 12.25 17.08 13.39 19.86 198.00 1575.00 290.00 1741.00 CATA-TCN[21 ] 12.80 17.61 13.16 21.04 234.31 1361.23 290.63 2303.42 MSDCNN-LSTM[28 ] 12.96 18.70 11.78 21.57 256.59 1873.86 211.99 2699.34 MHT[29 ] 11.92 13.70 10.63 17.73 215.20 746.70 150.50 1572.00 ATCN[15 ] 11.48 15.82 11.34 17.80 194.25 1210.57 249.19 1934.86 TATFA-Transformer[19 ] 12.21 15.07 11.23 18.81 261.50 1359.70 210.21 2506.35 本研究 11.38 12.76 11.81 14.58 192.40 629.61 218.85 908.58
2.5. 消融实验 2.5.1. 跨维度多尺度卷积网络的性能及效果验证 为了验证CDMSCN各组成部分的必要性和有效性,如表5 所示,推导出4个不同的变体:无通道注意力的变体1,采用文献[15 ]中挤压-激励机制的变体2,无多尺度时间依赖模块的变体3,无通道依赖模块的变体4. 所有变体的性能评价指标对比结果如表6 所示,可以看出,当模型集成所有子模块时,性能达到最佳. 1)通道注意力模块的影响:在所有子数据集中,具有通道注意力模块的CDMSCN在2个评价指标上均优于去除或替换该机制的网络变体. 特别是,变体1与变体2相比,性能下降更加显著,这表明通道注意力在模型预测中的作用. 变体2的表现证明本研究提出的通道注意力机制能够有效避免在时间尺度平均化过程中丢失关键时间信息,更适合于RUL预测任务. 2)多尺度时间依赖模块的影响:缺失多尺度时间依赖模块的变体3在性能上相比变体1和变体4有显著下降,说明多尺度时间依赖模块在整体模型中的核心作用. 与变量和通道维度相比,时间维度信息对于RUL预测更为关键. 3)通道依赖模块的影响:引入通道依赖模块的CDMSCN在2个评价指标上均优于未使用该模块的变体. 通道依赖模块通过提取通道维度的特征,帮助模型更有效地识别数据中的抽象特征,显著提高了模型的泛化能力和整体性能. ...
MHT: a multiscale hourglass-transformer for remaining useful life prediction of aircraft engine
2
2024
... 在4个子数据集上将所提方法与现有的6种先进方法进行对比实验,为了减少随机性的影响,以5次实验的均值作为最终的实验结果. 6种先进方法包括1) Double-Attn[17 ] :利用基于通道注意力的CNN将更大的权重应用于更重要的传感器,使用Transformer将注意力集中在关键时间步的特征上,使用全连接层预测RUL. 2) CATA-TCN[21 ] :利用基于通道注意力和时间注意力机制的时间卷积网络的双重注意力框架,分别关注来自不同传感器和不同时间步长的更关键的信息. 3) MSDCNN-LSTM[28 ] :结合多尺度深度卷积神经网络和长短期记忆的混合模型提取数据中的高级空间特征和长期时间相关特征. 4)MHT[29 ] :基于一维卷积神经网络设计的沙漏型多尺度特征提取器,将时间序列缩放为多时间尺度进行特征融合,利用Transformer进一步从融合特征中提取特征并输出RUL. 5)ATCN[15 ] :将改进的自注意力机制和挤压激励机制与时间卷积网络结合,双注意力机制设计用来衡量输入数据中不同传感器和时间步长的不同贡献. 6) TATFA-Transformer[19 ] :采用双向门控循环单元来增强原始信息的隐藏时间特征,提出新型距离函数来改善注意力分布,利用注意力机制捕获传感器特征的重要性与时间依赖关系. ...
... Comparison of evaluation indicators of different prediction methods in four sub-datasets
Tab.4 网络 RMSE θ FD001 FD002 FD003 FD004 FD001 FD002 FD003 FD004 Double-Attn[17 ] 12.25 17.08 13.39 19.86 198.00 1575.00 290.00 1741.00 CATA-TCN[21 ] 12.80 17.61 13.16 21.04 234.31 1361.23 290.63 2303.42 MSDCNN-LSTM[28 ] 12.96 18.70 11.78 21.57 256.59 1873.86 211.99 2699.34 MHT[29 ] 11.92 13.70 10.63 17.73 215.20 746.70 150.50 1572.00 ATCN[15 ] 11.48 15.82 11.34 17.80 194.25 1210.57 249.19 1934.86 TATFA-Transformer[19 ] 12.21 15.07 11.23 18.81 261.50 1359.70 210.21 2506.35 本研究 11.38 12.76 11.81 14.58 192.40 629.61 218.85 908.58
2.5. 消融实验 2.5.1. 跨维度多尺度卷积网络的性能及效果验证 为了验证CDMSCN各组成部分的必要性和有效性,如表5 所示,推导出4个不同的变体:无通道注意力的变体1,采用文献[15 ]中挤压-激励机制的变体2,无多尺度时间依赖模块的变体3,无通道依赖模块的变体4. 所有变体的性能评价指标对比结果如表6 所示,可以看出,当模型集成所有子模块时,性能达到最佳. 1)通道注意力模块的影响:在所有子数据集中,具有通道注意力模块的CDMSCN在2个评价指标上均优于去除或替换该机制的网络变体. 特别是,变体1与变体2相比,性能下降更加显著,这表明通道注意力在模型预测中的作用. 变体2的表现证明本研究提出的通道注意力机制能够有效避免在时间尺度平均化过程中丢失关键时间信息,更适合于RUL预测任务. 2)多尺度时间依赖模块的影响:缺失多尺度时间依赖模块的变体3在性能上相比变体1和变体4有显著下降,说明多尺度时间依赖模块在整体模型中的核心作用. 与变量和通道维度相比,时间维度信息对于RUL预测更为关键. 3)通道依赖模块的影响:引入通道依赖模块的CDMSCN在2个评价指标上均优于未使用该模块的变体. 通道依赖模块通过提取通道维度的特征,帮助模型更有效地识别数据中的抽象特征,显著提高了模型的泛化能力和整体性能. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}