[1]
邓运来, 张新明 铝及铝合金材料进展
[J]. 中国有色金属学报 , 2019 , 29 (9 ): 2115 - 2141
[本文引用: 1]
DENG Yunlai, ZHANG Xinming Development of aluminium and aluminium alloy
[J]. The Chinese Journal of Nonferrous Metals , 2019 , 29 (9 ): 2115 - 2141
[本文引用: 1]
[2]
杨传礼, 张修庆 基于机器视觉和深度学习的材料缺陷检测应用综述
[J]. 材料导报 , 2022 , 36 (16 ): 226 - 234
DOI:10.11896/cldb.20070136
[本文引用: 1]
YANG Chuanli, ZHANG Xiuqing Survey of applications of material defect detection based on machine vision and deep learning
[J]. Materials Reports , 2022 , 36 (16 ): 226 - 234
DOI:10.11896/cldb.20070136
[本文引用: 1]
[3]
侯占林, 赵京 基于机器视觉的零件外形缺陷检测
[J]. 组合机床与自动化加工技术 , 2019 , (11 ): 100 - 104
[本文引用: 1]
HOU Zhanlin, ZHAO Jing Research on part contour defect detection algorithm based on machine vision
[J]. Modular Machine Tool and Automatic Manufacturing Technique , 2019 , (11 ): 100 - 104
[本文引用: 1]
[4]
郑彬, 王鑫 基于机器视觉的型材表面缺陷图像处理
[J]. 机械设计 , 2020 , 37 (Suppl.1 ): 95 - 97
[本文引用: 1]
ZHENG Bin, WANG Xin Research on image processing of section steel surface defect based on machine vision
[J]. Journal of Machine Design , 2020 , 37 (Suppl.1 ): 95 - 97
[本文引用: 1]
[5]
赵文宏, 周神特, 吕建标, 等. 基于机器视觉的铝型材表面瑕疵检测方法[J]. 浙江工业大学学报, 2021, 49(1): 76–81.
[本文引用: 1]
ZHAO Wenhong, ZHOU Shente, LV Jianbiao, et al. Method for detecting surface defects of aluminum profile based on machine vision [J]. Journal of Zhejiang University of Technology . 2021, 49(1): 76–81.
[本文引用: 1]
[6]
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]// IEEE Conference on Computer Vision and Pattern Recognition . Columbus: IEEE, 2014: 580–587.
[本文引用: 1]
[7]
GIRSHICK R. Fast R-CNN [C]// IEEE International Conference on Computer Vision . Santiago: IEEE, 2015: 1440–1448.
[本文引用: 1]
[8]
REN S, HE K, GIRSHICK R, et al Faster R-CNN: towards real-time object detection with region proposal networks
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2017 , 39 (6 ): 1137 - 1149
DOI:10.1109/TPAMI.2016.2577031
[本文引用: 1]
[9]
黄凤荣, 李杨, 郭兰申, 等 基于Faster R-CNN的零件表面缺陷检测算法
[J]. 计算机辅助设计与图形学学报 , 2020 , 32 (6 ): 883 - 893
[本文引用: 1]
HUANG Fengrong, LI Yang, GUO Lanshen, et al Method for detecting surface defects of engine parts based on Faster R-CNN
[J]. Journal of Computer-aided Design and Computer Graphics , 2020 , 32 (6 ): 883 - 893
[本文引用: 1]
[10]
向宽, 李松松, 栾明慧, 等 基于改进Faster RCNN的铝材表面缺陷检测方法
[J]. 仪器仪表学报 , 2021 , 42 (1 ): 191 - 198
[本文引用: 1]
XIANG Kuan, LI Songsong, LUAN Minghui, et al Aluminum product surface defect detection method based on improved Faster RCNN
[J]. Chinese Journal of Scientific Instrument , 2021 , 42 (1 ): 191 - 198
[本文引用: 1]
[11]
REDMON J, DIVVALA S, GIRSHICK R, et al. You Only Look Once: unified, real-time object detection [C]// IEEE Conference on Computer Vision and Pattern Recognition . Las Vegas: IEEE, 2016: 779–788.
[本文引用: 1]
[12]
SUN L S , WEI J X , DU H C , et al. MSFF: a multi-Scale feature fusion network for surface defect detection of aluminum profiles [J]. IEICE Transactions on Information and Systems , 2022, 105(9): 1652–1655.
[本文引用: 1]
[13]
杨畅畅, 李慧玲, 潘广通, 等 基于改进YOLOv4算法的铝型材表面缺陷检测
[J]. 组合机床与自动化加工技术 , 2022 , (11 ): 66 - 69
[本文引用: 1]
YANG Changchang, LI Huiling, PAN Guangtong, et al Surface defect detection of aluminum profiles based on improved YOLOv4 Algorithm
[J]. Modular Machine Tool and Automatic Manufacturing Technique , 2022 , (11 ): 66 - 69
[本文引用: 1]
[14]
张建国, 高飞, 莘明星, 等 基于改进YOLOv5s的铝型材表面弱缺陷识别方法
[J]. 船舶工程 , 2023 , 45 (6 ): 161 - 166
[本文引用: 1]
ZHANG Jianguo, GAO Fei, XIN Mingxing, et al Weak defect identification method on profile surface based on image enhancement and YOLOv5s
[J]. Ship Engineering , 2023 , 45 (6 ): 161 - 166
[本文引用: 1]
[15]
曹义亲, 周一纬, 徐露 基于E-YOLOX的实时金属表面缺陷检测算法
[J]. 图学学报 , 2023 , 44 (4 ): 677 - 690
[本文引用: 1]
CAO Yiqin, ZHOU Yiwei, XU Lu, et al A real-time metallic surface defect detection algorithm based on E-YOLOX
[J]. Journal of Graphics , 2023 , 44 (4 ): 677 - 690
[本文引用: 1]
[16]
LV Z, LI Y, QIAN S Real-time and accurate defect segmentation of aluminum strip surface via a lightweight network
[J]. Journal of Real-Time Image Processing , 2023 , 20 (2 ): 37
[本文引用: 1]
[17]
KANG X J, LI J F AYOLOv7-tiny: towards efficient defect detection in solid color circular weft fabric
[J]. Textile Research Journal , 2024 , 94 (1/2 ): 225 - 245
DOI:10.1177/00405175231205898
[本文引用: 1]
[18]
KONG F Y, LI M X, LIU S W, et al. Residual local feature network for efficient super-resolution [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . New Orleans: IEEE , 2022: 766–776.
[本文引用: 1]
[19]
MA N N, ZHANG X Y, SUN J. Funnel activation for visual recognition [C]// Computer Vision-ECCV 2020: 16th European Conference . Glasgow: Springer, 2020: 351–368.
[本文引用: 1]
[20]
NING T L, PAN S, ZHOU J. YOLOv7-SIMAM: an effective method for SAR ship detection [C]// 4th International Conference on Neural Networks, Information and Communication . Guangzhou: IEEE, 2024: 754–758.
[本文引用: 1]
[21]
CHEN J R, KAO S H, HE H, et al. Run, don’t walk: chasing higher FLOPS for faster neural networks [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Vancouver: IEEE, 2023: 12021–12031.
[本文引用: 1]
[22]
WANG J W, XU C, YANG W, et al. A normalized gaussian wasserstein distance for tiny object detection [EB/OL]. (2021−10−26) [2024−01−01]. https://arxiv.org/abs/2110.13389.
[本文引用: 1]
[23]
沈晓海, 栗泽昊, 李敏, 等 基于多任务深度学习的铝材表面缺陷检测
[J]. 激光与光电子学进展 , 2020 , 57 (10 ): 10
[本文引用: 1]
SHEN Xiaohai, LI Zehao, LI Min, et al Aluminum surface-defect detection based on multi-Task deep learning
[J]. Laser and Optoelectronics Progress , 2020 , 57 (10 ): 10
[本文引用: 1]
[24]
邓丁山, 王昊楠, 赵军杰, 等. 基于改进YOLOv7的风力发电机表面缺陷检测算法[EB/OL]. [2024−01−01]. https://doi.org/10.13196/j.cims.2023.0410.
[本文引用: 1]
[26]
齐向明, 柴蕊, 高一萌, 等 重构SPPCSPC与优化下采样的小目标检测算法
[J]. 计算机工程与应用 , 2023 , 59 (20 ): 158 - 166
DOI:10.3778/j.issn.1002-8331.2305-0004
[本文引用: 1]
QI Xiangming, CHAI Rui, GAO Yimeng, et al Algorithm of reconstructed SPPCSPC and optimized downsampling for small object detection
[J]. Computer Engineering and Applications , 2023 , 59 (20 ): 158 - 166
DOI:10.3778/j.issn.1002-8331.2305-0004
[本文引用: 1]
[27]
SELVARAJU R R, COGSWELL M, DAS A, et al Grad-CAM: visual explanations from deep networks via gradient-based localization
[J]. International Journal of Computer Vision , 2020 , 128 (2 ): 336 - 359
DOI:10.1007/s11263-019-01228-7
[本文引用: 1]
[28]
席凌飞, 伊力哈木·亚尔买买提, 刘雅洁, 等 基于改进YOLOv5的铝型材表面缺陷检测方法
[J]. 广西师范大学学报: 自然科学版 , 2024 , 42 (1 ): 111 - 119
[本文引用: 3]
XI Lingfei, YAERMAIMAITI Yilihamu, LIU Yajie et al. Surface defect detection method for aluminum profile based on improved YOLOv5
[J]. Journal of Guangxi Normal University: Natural Science Edition , 2024 , 42 (1 ): 111 - 119
[本文引用: 3]
铝及铝合金材料进展
1
2019
... 铝型材广泛应用于建筑与结构、耐用消费品、包装容器、机械设备、交通运输等行业[1 ] . 铝型材在工厂生产过程中经过多种工艺流程,其表面容易产生缺陷影响铝型材的外观、质量和性能. 因此,快速准确检测铝型材表皮质量,保障良品率极为重要. ...
铝及铝合金材料进展
1
2019
... 铝型材广泛应用于建筑与结构、耐用消费品、包装容器、机械设备、交通运输等行业[1 ] . 铝型材在工厂生产过程中经过多种工艺流程,其表面容易产生缺陷影响铝型材的外观、质量和性能. 因此,快速准确检测铝型材表皮质量,保障良品率极为重要. ...
基于机器视觉和深度学习的材料缺陷检测应用综述
1
2022
... 传统型材表面缺陷检测依靠专业的技术人员手动操作,检测效率低且依赖操作人员主观判断,检测的准确度难以得到保证[2 ] . 随着计算机视觉技术的不断发展,基于机器学习的检测方法具有无接触测量且准确的优点,能迅速应用于型材表面缺陷检测中. 侯占林等[3 ] 在基于机器视觉的零件外形缺陷检测中,提出2次动态提取算法提取零件区域特征. 实验结果表明,算法能满足零件外形缺陷检测的需求. 郑彬等[4 ] 采用HALCON图像处理软件对获取的图像进行预处理和特征提取,解决了传统型材表面缺陷检测精度低的问题. 赵文宏等[5 ] 提出铝型材表面瑕疵检测方法,使用改进的Canny算法对图像缺陷进行定位和HOG算法进行特征提取,提升模型的泛化能力和鲁棒性. 传统的基于机器视觉的缺陷检测仍然存在特征提取工作复杂、冗余信息多、泛化能力不足的问题. ...
基于机器视觉和深度学习的材料缺陷检测应用综述
1
2022
... 传统型材表面缺陷检测依靠专业的技术人员手动操作,检测效率低且依赖操作人员主观判断,检测的准确度难以得到保证[2 ] . 随着计算机视觉技术的不断发展,基于机器学习的检测方法具有无接触测量且准确的优点,能迅速应用于型材表面缺陷检测中. 侯占林等[3 ] 在基于机器视觉的零件外形缺陷检测中,提出2次动态提取算法提取零件区域特征. 实验结果表明,算法能满足零件外形缺陷检测的需求. 郑彬等[4 ] 采用HALCON图像处理软件对获取的图像进行预处理和特征提取,解决了传统型材表面缺陷检测精度低的问题. 赵文宏等[5 ] 提出铝型材表面瑕疵检测方法,使用改进的Canny算法对图像缺陷进行定位和HOG算法进行特征提取,提升模型的泛化能力和鲁棒性. 传统的基于机器视觉的缺陷检测仍然存在特征提取工作复杂、冗余信息多、泛化能力不足的问题. ...
基于机器视觉的零件外形缺陷检测
1
2019
... 传统型材表面缺陷检测依靠专业的技术人员手动操作,检测效率低且依赖操作人员主观判断,检测的准确度难以得到保证[2 ] . 随着计算机视觉技术的不断发展,基于机器学习的检测方法具有无接触测量且准确的优点,能迅速应用于型材表面缺陷检测中. 侯占林等[3 ] 在基于机器视觉的零件外形缺陷检测中,提出2次动态提取算法提取零件区域特征. 实验结果表明,算法能满足零件外形缺陷检测的需求. 郑彬等[4 ] 采用HALCON图像处理软件对获取的图像进行预处理和特征提取,解决了传统型材表面缺陷检测精度低的问题. 赵文宏等[5 ] 提出铝型材表面瑕疵检测方法,使用改进的Canny算法对图像缺陷进行定位和HOG算法进行特征提取,提升模型的泛化能力和鲁棒性. 传统的基于机器视觉的缺陷检测仍然存在特征提取工作复杂、冗余信息多、泛化能力不足的问题. ...
基于机器视觉的零件外形缺陷检测
1
2019
... 传统型材表面缺陷检测依靠专业的技术人员手动操作,检测效率低且依赖操作人员主观判断,检测的准确度难以得到保证[2 ] . 随着计算机视觉技术的不断发展,基于机器学习的检测方法具有无接触测量且准确的优点,能迅速应用于型材表面缺陷检测中. 侯占林等[3 ] 在基于机器视觉的零件外形缺陷检测中,提出2次动态提取算法提取零件区域特征. 实验结果表明,算法能满足零件外形缺陷检测的需求. 郑彬等[4 ] 采用HALCON图像处理软件对获取的图像进行预处理和特征提取,解决了传统型材表面缺陷检测精度低的问题. 赵文宏等[5 ] 提出铝型材表面瑕疵检测方法,使用改进的Canny算法对图像缺陷进行定位和HOG算法进行特征提取,提升模型的泛化能力和鲁棒性. 传统的基于机器视觉的缺陷检测仍然存在特征提取工作复杂、冗余信息多、泛化能力不足的问题. ...
基于机器视觉的型材表面缺陷图像处理
1
2020
... 传统型材表面缺陷检测依靠专业的技术人员手动操作,检测效率低且依赖操作人员主观判断,检测的准确度难以得到保证[2 ] . 随着计算机视觉技术的不断发展,基于机器学习的检测方法具有无接触测量且准确的优点,能迅速应用于型材表面缺陷检测中. 侯占林等[3 ] 在基于机器视觉的零件外形缺陷检测中,提出2次动态提取算法提取零件区域特征. 实验结果表明,算法能满足零件外形缺陷检测的需求. 郑彬等[4 ] 采用HALCON图像处理软件对获取的图像进行预处理和特征提取,解决了传统型材表面缺陷检测精度低的问题. 赵文宏等[5 ] 提出铝型材表面瑕疵检测方法,使用改进的Canny算法对图像缺陷进行定位和HOG算法进行特征提取,提升模型的泛化能力和鲁棒性. 传统的基于机器视觉的缺陷检测仍然存在特征提取工作复杂、冗余信息多、泛化能力不足的问题. ...
基于机器视觉的型材表面缺陷图像处理
1
2020
... 传统型材表面缺陷检测依靠专业的技术人员手动操作,检测效率低且依赖操作人员主观判断,检测的准确度难以得到保证[2 ] . 随着计算机视觉技术的不断发展,基于机器学习的检测方法具有无接触测量且准确的优点,能迅速应用于型材表面缺陷检测中. 侯占林等[3 ] 在基于机器视觉的零件外形缺陷检测中,提出2次动态提取算法提取零件区域特征. 实验结果表明,算法能满足零件外形缺陷检测的需求. 郑彬等[4 ] 采用HALCON图像处理软件对获取的图像进行预处理和特征提取,解决了传统型材表面缺陷检测精度低的问题. 赵文宏等[5 ] 提出铝型材表面瑕疵检测方法,使用改进的Canny算法对图像缺陷进行定位和HOG算法进行特征提取,提升模型的泛化能力和鲁棒性. 传统的基于机器视觉的缺陷检测仍然存在特征提取工作复杂、冗余信息多、泛化能力不足的问题. ...
1
... 传统型材表面缺陷检测依靠专业的技术人员手动操作,检测效率低且依赖操作人员主观判断,检测的准确度难以得到保证[2 ] . 随着计算机视觉技术的不断发展,基于机器学习的检测方法具有无接触测量且准确的优点,能迅速应用于型材表面缺陷检测中. 侯占林等[3 ] 在基于机器视觉的零件外形缺陷检测中,提出2次动态提取算法提取零件区域特征. 实验结果表明,算法能满足零件外形缺陷检测的需求. 郑彬等[4 ] 采用HALCON图像处理软件对获取的图像进行预处理和特征提取,解决了传统型材表面缺陷检测精度低的问题. 赵文宏等[5 ] 提出铝型材表面瑕疵检测方法,使用改进的Canny算法对图像缺陷进行定位和HOG算法进行特征提取,提升模型的泛化能力和鲁棒性. 传统的基于机器视觉的缺陷检测仍然存在特征提取工作复杂、冗余信息多、泛化能力不足的问题. ...
1
... 传统型材表面缺陷检测依靠专业的技术人员手动操作,检测效率低且依赖操作人员主观判断,检测的准确度难以得到保证[2 ] . 随着计算机视觉技术的不断发展,基于机器学习的检测方法具有无接触测量且准确的优点,能迅速应用于型材表面缺陷检测中. 侯占林等[3 ] 在基于机器视觉的零件外形缺陷检测中,提出2次动态提取算法提取零件区域特征. 实验结果表明,算法能满足零件外形缺陷检测的需求. 郑彬等[4 ] 采用HALCON图像处理软件对获取的图像进行预处理和特征提取,解决了传统型材表面缺陷检测精度低的问题. 赵文宏等[5 ] 提出铝型材表面瑕疵检测方法,使用改进的Canny算法对图像缺陷进行定位和HOG算法进行特征提取,提升模型的泛化能力和鲁棒性. 传统的基于机器视觉的缺陷检测仍然存在特征提取工作复杂、冗余信息多、泛化能力不足的问题. ...
1
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
1
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
Faster R-CNN: towards real-time object detection with region proposal networks
1
2017
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于Faster R-CNN的零件表面缺陷检测算法
1
2020
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于Faster R-CNN的零件表面缺陷检测算法
1
2020
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于改进Faster RCNN的铝材表面缺陷检测方法
1
2021
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于改进Faster RCNN的铝材表面缺陷检测方法
1
2021
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
1
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
1
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于改进YOLOv4算法的铝型材表面缺陷检测
1
2022
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于改进YOLOv4算法的铝型材表面缺陷检测
1
2022
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于改进YOLOv5s的铝型材表面弱缺陷识别方法
1
2023
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于改进YOLOv5s的铝型材表面弱缺陷识别方法
1
2023
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于E-YOLOX的实时金属表面缺陷检测算法
1
2023
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
基于E-YOLOX的实时金属表面缺陷检测算法
1
2023
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
Real-time and accurate defect segmentation of aluminum strip surface via a lightweight network
1
2023
... 当前,基于深度学习的目标检测算法得到了广泛的关注. 算法主要分为2类. 一类为两阶段算法,如R-CNN[6 ] 、Fast-RCNN[7 ] 、Faster-RCNN[8 ] 等. 黄凤荣等[9 ] 基于Faster-RCNN算法,使用聚类算法生成anchor,并通过引入多级感兴趣区域池化 (region of interest pooling, ROI)池化层结构增加检测精度. 向宽等[10 ] 提出改进Faster-RCNN的铝材表面缺陷检测方法,通过数据增强和主干网络引入特征金字塔网络提升小目标检测精度. 两阶段算法检测精度较低且检测速度慢,难以满足实时检测. 另一类为一阶段算法,其中,YOLO系列模型由于其良好的检测速度和准确率深受青睐[11 ] . Sun等[12 ] 提出改进的YOLOv3模型,采用不同大小卷积核捕获缺陷多尺度信息并引入SE注意力,构建由注意力引导的特征提取模块. 杨畅畅等[13 ] 提出改进的YOLOv4模型,在颈部网络中嵌入通道注意力机制SENet,增加浅层特征层解决铝型材小目标缺陷检测精度低的问题. 张建国等[14 ] 提出改进的YOLOv5铝型材表面弱缺陷识别方法,添加解耦检测器提高预测准确率,优化损失函数提升定位准确度,取得较高检测精度但参数量骤增. 曹义亲等[15 ] 提出基于YOLOX的金属表面检测算法,采用残差网络和深度卷积构成ECMNet提取特征,解决了参数量和计算负担过大的问题但部分缺陷检测精度较低. Lv等[16 ] 提出轻量化铝带表面缺陷网络,嵌入GhostNet特征提取,采用深度卷积构建残差结构定位缺陷,取得速度和精度的良好平衡. ...
AYOLOv7-tiny: towards efficient defect detection in solid color circular weft fabric
1
2024
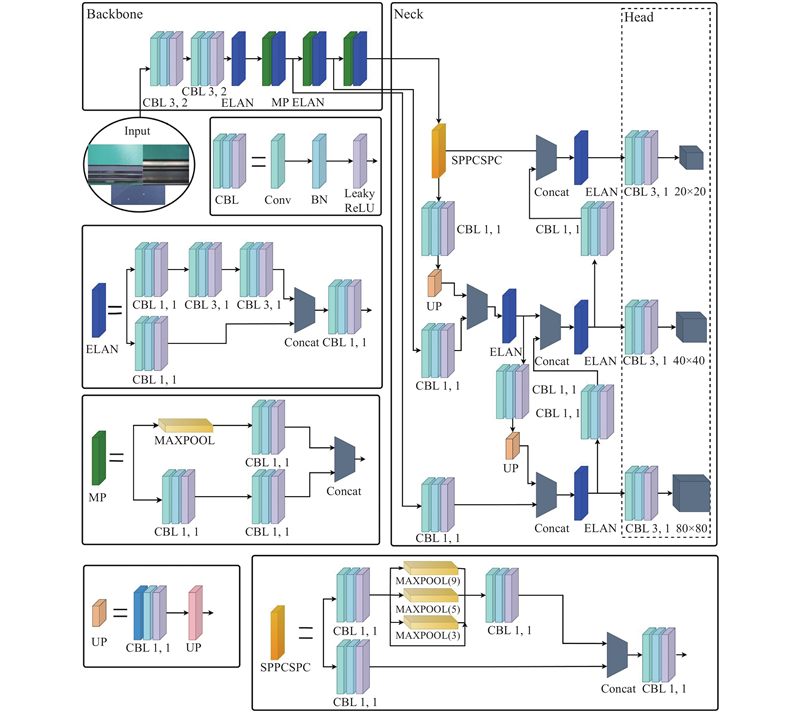
... YOLOv7-tiny算法于2022年被提出,主要由输入端(Input)、主干网络(Backbone)、特征融合层(Neck)和检测头(Head)4部分组成[17 ] . YOLOv7-tiny在YOLO系列算法中具有检测精度较高、检测速度快和模型轻量化的优点. 算法采用基于串联模型的缩放策略,其中块的深度和宽度以相同的因素进行缩放,使模型保持参数量、计算量、推理速度和精度平衡的最佳结构. 结构如图1 所示. ...
1
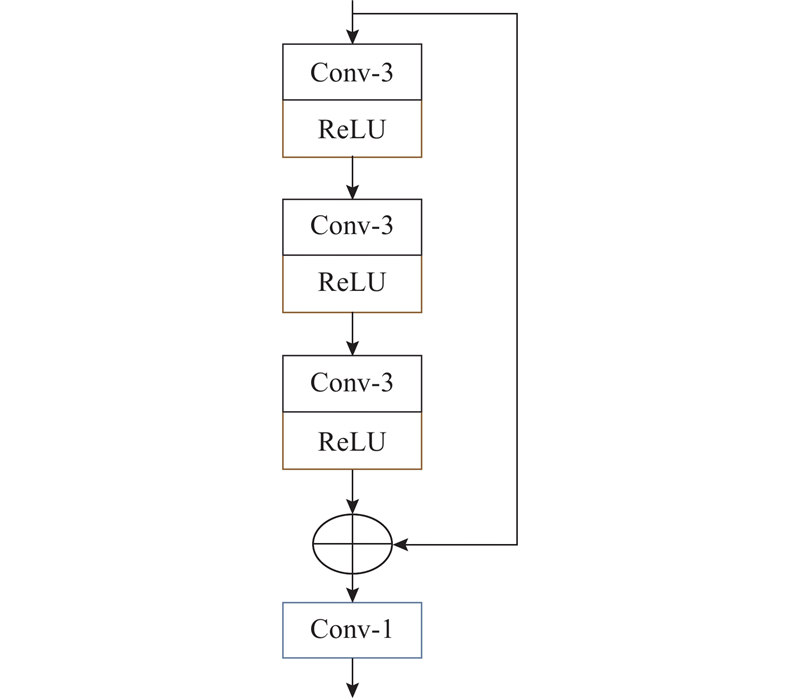
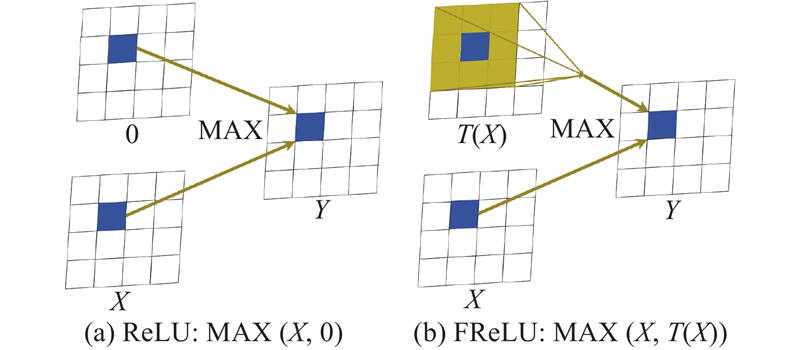
... 在细粒度特征提取通道中引入残差局部特征块(residual local feature block,RLFB)网络中残差结构增加网络深度,减少信息丢失,提取更多小目标特征. 如图3 所示,Kong等[18 ] 提出高效超分辨率残差局部特征网络RLFB,相对于其他残差网络,其可以在保持模型能力的同时显著减少推理时间. 如图3 所示,RFLB使用3个浅层残差块细化提取特征,使用ReLU激活函数提升计算效率并加速网络收敛,使用add操作实现通道数不变信息量增加,使用1×1卷积进行特征融合. 为了增强模块对铝型材多尺度缺陷信息的空间敏感性,将ReLU替换为FReLU[19 ] . FReLU增加一个极少内存开销的空间条件将ReLU函数扩展为二维漏斗状条件,提取每个像素的周边信息后加权求和. 原理如图4 所示. ...
1
... 在细粒度特征提取通道中引入残差局部特征块(residual local feature block,RLFB)网络中残差结构增加网络深度,减少信息丢失,提取更多小目标特征. 如图3 所示,Kong等[18 ] 提出高效超分辨率残差局部特征网络RLFB,相对于其他残差网络,其可以在保持模型能力的同时显著减少推理时间. 如图3 所示,RFLB使用3个浅层残差块细化提取特征,使用ReLU激活函数提升计算效率并加速网络收敛,使用add操作实现通道数不变信息量增加,使用1×1卷积进行特征融合. 为了增强模块对铝型材多尺度缺陷信息的空间敏感性,将ReLU替换为FReLU[19 ] . FReLU增加一个极少内存开销的空间条件将ReLU函数扩展为二维漏斗状条件,提取每个像素的周边信息后加权求和. 原理如图4 所示. ...
1
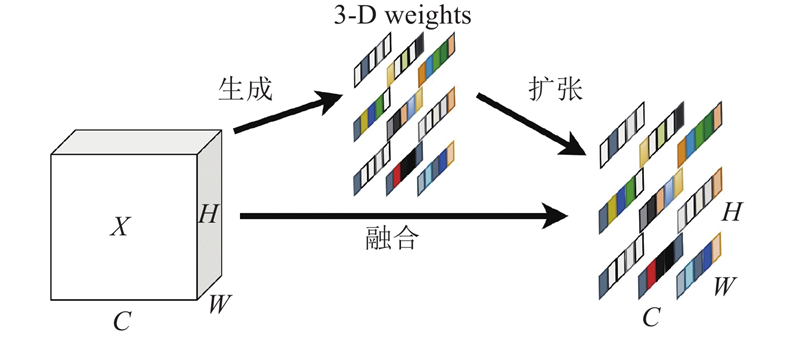
... 最后,模块引入SimAM无参数注意力机制,其不包含任何子网络结构,可以在不增加原始网络参数的条件下,为特征图推断三维注意力权重[20 ] . 结构如图5 所示. 嵌入SimAM注意力机制,划分目标像素点,并推断出特征图的空间和通道注意力权重,减少特征损耗,抑制混淆特征表达. ...
1
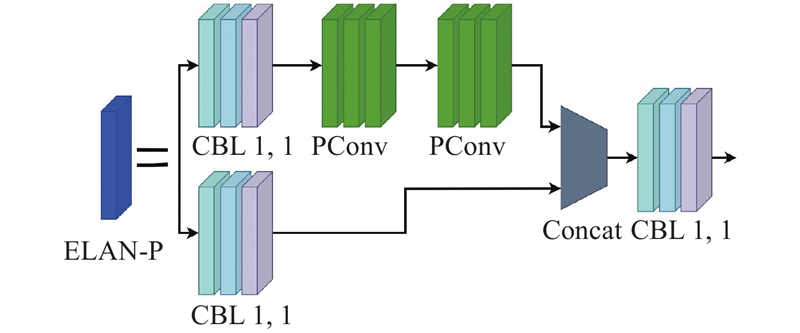
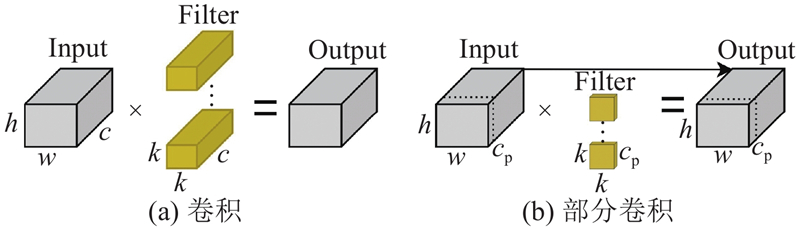
... 卷积(convolution,Conv)和深度可分离卷积(depthwise separable convolution, DWConv)是神经网络中2种被广泛使用的构建块. 相较于Conv,DWConv能够大量减少FLOPs,但用其单一的替换普通卷积会导致模型精度骤降. 相较于Conv,PConv特点在于运用普通卷积提取输入通道和输出通道的一部分特征进行计算,能够在不失去通道特征数的同时,减少冗余计算和内存访问,更有效地提取空间特征[21 ] . ...
1
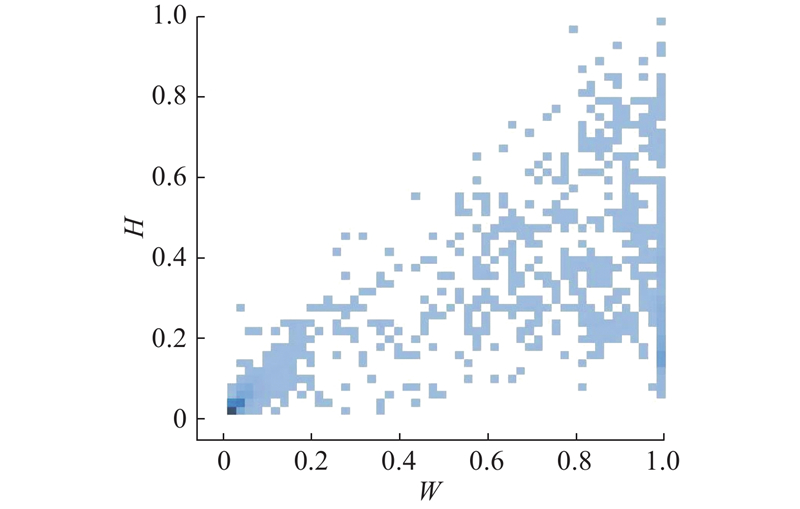
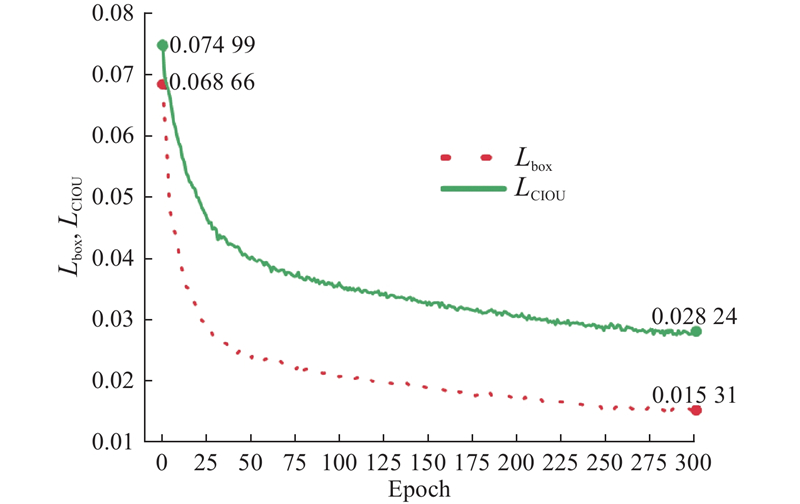
... 在铝型材表面缺陷检测中,脏点缺陷尺度非常小,容易导致漏检问题. YOLOv7-tiny算法损失函数基于交并比(intersection over union, IoU)的相似度度量对微小目标的位置偏差较敏感,导致网络收敛困难,小目标识别能力较差. 为了解决这些问题,采用NWD损失度量小目标检测框,在回归损失函数中添加NWD损失可以弥补IoU损失在小目标检测中的不足. 该方法使用二维高斯分布对检测边框进行建模,并通过它们之间对应高斯分布的相似度来计算预测目标和真实目标之间的相似性[22 ] . 边界框之间高斯距离分布表达式如下: ...
基于多任务深度学习的铝材表面缺陷检测
1
2020
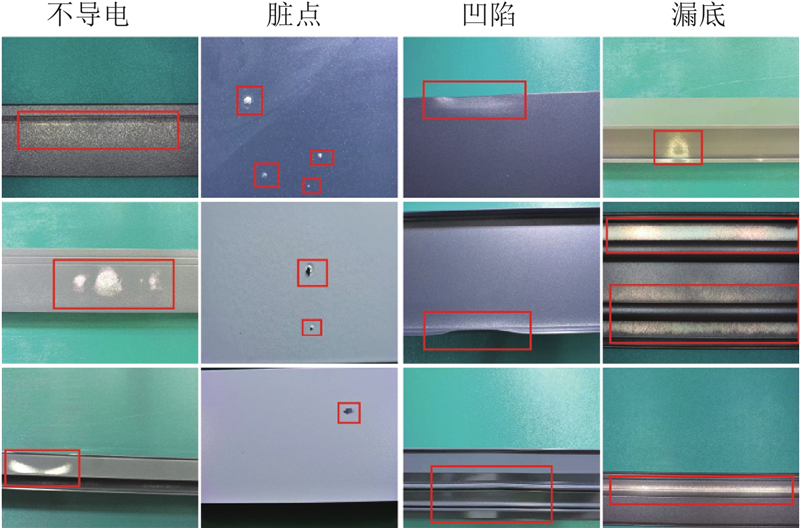
... 实验中的铝型材数据集来自2018年阿里云天池铝型材表面瑕疵识别数据集[23 ] . 图片为彩色,分辨率为2560 ×1920 . 实验数据集包含4种缺陷类型:不导电、脏点、凹陷和漏底,共770张图片. 示例如图11 所示. 图中,用红色方框圈出图片缺陷,可以观察到不同缺陷形状各异且尺度差异大,小目标缺陷图片面积占比较小. ...
基于多任务深度学习的铝材表面缺陷检测
1
2020
... 实验中的铝型材数据集来自2018年阿里云天池铝型材表面瑕疵识别数据集[23 ] . 图片为彩色,分辨率为2560 ×1920 . 实验数据集包含4种缺陷类型:不导电、脏点、凹陷和漏底,共770张图片. 示例如图11 所示. 图中,用红色方框圈出图片缺陷,可以观察到不同缺陷形状各异且尺度差异大,小目标缺陷图片面积占比较小. ...
1
... 综上所述,随着检测的图像分辨率降低,改进模型和原模型的FPS提升,同分辨率下原模型检测速度更高. 随着图像分辨率降低,改进模型和原模型检测缺陷置信度下降,召回率降低,大目标缺陷更受影响. 同分辨率下改进模型的召回率更高,识别能力更强. 检测缺陷的召回率过低易产生漏检,影响模型的效率[24 ] . 同时,检测速度FPS也影响模型的效率[25 ] . 因此,模型FPS较高的同时召回率也越高,模型的效率更高. 在不同分辨率下,当改进模型和原模型FPS相近时,改进模型具有更高的召回率和效率. ...
改进YOLOX-S的偏光片表面缺陷检测算法
1
2024
... 综上所述,随着检测的图像分辨率降低,改进模型和原模型的FPS提升,同分辨率下原模型检测速度更高. 随着图像分辨率降低,改进模型和原模型检测缺陷置信度下降,召回率降低,大目标缺陷更受影响. 同分辨率下改进模型的召回率更高,识别能力更强. 检测缺陷的召回率过低易产生漏检,影响模型的效率[24 ] . 同时,检测速度FPS也影响模型的效率[25 ] . 因此,模型FPS较高的同时召回率也越高,模型的效率更高. 在不同分辨率下,当改进模型和原模型FPS相近时,改进模型具有更高的召回率和效率. ...
改进YOLOX-S的偏光片表面缺陷检测算法
1
2024
... 综上所述,随着检测的图像分辨率降低,改进模型和原模型的FPS提升,同分辨率下原模型检测速度更高. 随着图像分辨率降低,改进模型和原模型检测缺陷置信度下降,召回率降低,大目标缺陷更受影响. 同分辨率下改进模型的召回率更高,识别能力更强. 检测缺陷的召回率过低易产生漏检,影响模型的效率[24 ] . 同时,检测速度FPS也影响模型的效率[25 ] . 因此,模型FPS较高的同时召回率也越高,模型的效率更高. 在不同分辨率下,当改进模型和原模型FPS相近时,改进模型具有更高的召回率和效率. ...
重构SPPCSPC与优化下采样的小目标检测算法
1
2023
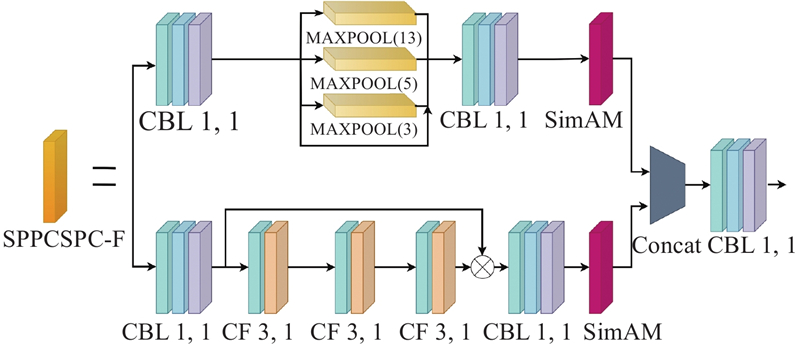
... 为了验证重构SPPCSPC-F模块性能,将重构模块、原模块和齐向明等[26 ] 提出的SPPCSPC-S模块在YOLOv7-tiny模型上进行对比实验. 在相同实验参数和环境下,实验结果如表4 所示. 表中,Q 为参数量,FLOPs为计算量. 相较于使用原模块和SPPCSPC-S模块,使用SPPCSPC-F模块,模型参数量和计算量少量增加但模型能提取更丰富的目标信息,模型检测精度分别提高1.8个百分点和3.4个百分点. ...
重构SPPCSPC与优化下采样的小目标检测算法
1
2023
... 为了验证重构SPPCSPC-F模块性能,将重构模块、原模块和齐向明等[26 ] 提出的SPPCSPC-S模块在YOLOv7-tiny模型上进行对比实验. 在相同实验参数和环境下,实验结果如表4 所示. 表中,Q 为参数量,FLOPs为计算量. 相较于使用原模块和SPPCSPC-S模块,使用SPPCSPC-F模块,模型参数量和计算量少量增加但模型能提取更丰富的目标信息,模型检测精度分别提高1.8个百分点和3.4个百分点. ...
Grad-CAM: visual explanations from deep networks via gradient-based localization
1
2020
... 为了进一步验证SPPCSPC-F模块在特征提取上的优势,对表4 中不同模型输出进行Grad-CAM热力图可视化[27 ] . 目标检测热力图能够直观地展示模型关注区域. 热力图结果如图15 所示,热力值区域代表网络关注的重点区域. 相较于另外2种模块,SPPCSPC-F模块关注区域更加集中,更贴近目标缺陷位置,具有更高的置信度和更强的特征提取能力. ...
基于改进YOLOv5的铝型材表面缺陷检测方法
3
2024
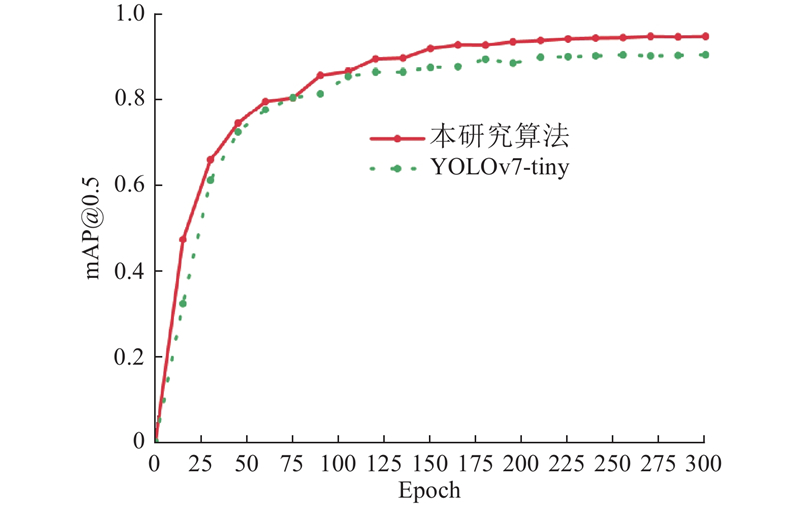
... 通过对YOLOv7-tiny算法的一系列改进取得指标提高. 为了进一步验证改进后算法的性能,选择几类主流且参数量相仿的轻量级目标检测算法以及改进的YOLOv5-s[28 ] 在铝型材数据集上进行对比实验. 结果如表6 所示. 改进后算法正确识别出更多缺陷,取得最高召回率91.8%,漏检减少. 相较于Faster-RCNN、YOLOv3-tiny、YOLOv5-s、YOLOv5-s[28 ] 和YOLOv8-s等算法,改进算法在mAP@0.5上,达到94.5%,高于其他算法. 在参数量、计算量和模型体积方面,改进后算法更加轻量化便于嵌入式设备的移植,在FPS方面也更具有优势. 结果证明改进后算法检测性能优于上述几类算法. 相较于原算法,改进后算法以参数量仅增加0.13×106 的代价获得mAP@0.5提高4.2个百分点,计算量降低34.8%. 由于网络层数增加,FPS略微下降到45帧/s,仍然满足工业实时检测要求. ...
... [28 ]和YOLOv8-s等算法,改进算法在mAP@0.5上,达到94.5%,高于其他算法. 在参数量、计算量和模型体积方面,改进后算法更加轻量化便于嵌入式设备的移植,在FPS方面也更具有优势. 结果证明改进后算法检测性能优于上述几类算法. 相较于原算法,改进后算法以参数量仅增加0.13×106 的代价获得mAP@0.5提高4.2个百分点,计算量降低34.8%. 由于网络层数增加,FPS略微下降到45帧/s,仍然满足工业实时检测要求. ...
... Comparative experimental results on different algorithm indicators
Tab.6 模型 AP/% mAP@0.5/% R /%Q /106 FLOPs/109 V /MBFPS/(帧·s−1 ) 不导电 脏点 漏底 凹陷 Faster-RCNN 97.4 72.8 95.8 81.8 86.9 62.3 41.30 214.0 315.0 16 YOLOv3-tiny 52.8 69.0 71.8 81.2 68.7 88.4 8.67 13.0 17.4 40 YOLOv5-s 99.3 79.9 99.4 91.2 92.5 88.8 7.00 16.0 14.4 45 改进的YOLOv5-s[28 ] 98.8 72.8 99.5 89.0 90.0 88.6 7.20 18.6 15.3 38 YOLOv7-tiny 99.5 69.6 99.8 92.2 90.3 88.5 6.02 13.2 12.3 50 YOLOv8-s 99.4 78.6 99.5 93.5 92.8 89.4 11.10 28.7 22.5 40 本研究模型 99.2 82.7 99.7 96.2 94.5 91.8 6.15 8.6 12.7 45
3.8. 在公共数据集上的实验 为了验证改进算法在其他金属表面缺陷数据集的泛化性,选取东北大学NEU-DET钢材表面缺陷数据集进行训练. 数据集共有1800 张灰度图像,包含轧制氧化皮(RS)、斑块(Pa)、裂纹(Cr)、点蚀面(PS)、夹杂物(In)和划痕(Sc). ...
基于改进YOLOv5的铝型材表面缺陷检测方法
3
2024
... 通过对YOLOv7-tiny算法的一系列改进取得指标提高. 为了进一步验证改进后算法的性能,选择几类主流且参数量相仿的轻量级目标检测算法以及改进的YOLOv5-s[28 ] 在铝型材数据集上进行对比实验. 结果如表6 所示. 改进后算法正确识别出更多缺陷,取得最高召回率91.8%,漏检减少. 相较于Faster-RCNN、YOLOv3-tiny、YOLOv5-s、YOLOv5-s[28 ] 和YOLOv8-s等算法,改进算法在mAP@0.5上,达到94.5%,高于其他算法. 在参数量、计算量和模型体积方面,改进后算法更加轻量化便于嵌入式设备的移植,在FPS方面也更具有优势. 结果证明改进后算法检测性能优于上述几类算法. 相较于原算法,改进后算法以参数量仅增加0.13×106 的代价获得mAP@0.5提高4.2个百分点,计算量降低34.8%. 由于网络层数增加,FPS略微下降到45帧/s,仍然满足工业实时检测要求. ...
... [28 ]和YOLOv8-s等算法,改进算法在mAP@0.5上,达到94.5%,高于其他算法. 在参数量、计算量和模型体积方面,改进后算法更加轻量化便于嵌入式设备的移植,在FPS方面也更具有优势. 结果证明改进后算法检测性能优于上述几类算法. 相较于原算法,改进后算法以参数量仅增加0.13×106 的代价获得mAP@0.5提高4.2个百分点,计算量降低34.8%. 由于网络层数增加,FPS略微下降到45帧/s,仍然满足工业实时检测要求. ...
... Comparative experimental results on different algorithm indicators
Tab.6 模型 AP/% mAP@0.5/% R /%Q /106 FLOPs/109 V /MBFPS/(帧·s−1 ) 不导电 脏点 漏底 凹陷 Faster-RCNN 97.4 72.8 95.8 81.8 86.9 62.3 41.30 214.0 315.0 16 YOLOv3-tiny 52.8 69.0 71.8 81.2 68.7 88.4 8.67 13.0 17.4 40 YOLOv5-s 99.3 79.9 99.4 91.2 92.5 88.8 7.00 16.0 14.4 45 改进的YOLOv5-s[28 ] 98.8 72.8 99.5 89.0 90.0 88.6 7.20 18.6 15.3 38 YOLOv7-tiny 99.5 69.6 99.8 92.2 90.3 88.5 6.02 13.2 12.3 50 YOLOv8-s 99.4 78.6 99.5 93.5 92.8 89.4 11.10 28.7 22.5 40 本研究模型 99.2 82.7 99.7 96.2 94.5 91.8 6.15 8.6 12.7 45
3.8. 在公共数据集上的实验 为了验证改进算法在其他金属表面缺陷数据集的泛化性,选取东北大学NEU-DET钢材表面缺陷数据集进行训练. 数据集共有1800 张灰度图像,包含轧制氧化皮(RS)、斑块(Pa)、裂纹(Cr)、点蚀面(PS)、夹杂物(In)和划痕(Sc). ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}