

换道行为是造成交通流紊乱、通行效率降低,引发安全隐患的重要原因. 研究换道行为特征有利于解读交通流状态演变规律和交通事件发生机理. 现有研究常将换道过程当作瞬时交通行为,如Gao等[1]在瞬时换道类型下,利用弹性算法对人类驾驶车辆的换道行为进行预测. 瞬时交通行为忽视了包括换道持续距离和时间在内的表征换道过程的因素,导致针对换道行为安全和效率的评价存在缺陷. 此外,交通仿真是理论研究的重要手段,仿真建模中弱化换道过程研究结果可能会失真.
在城市道路交通系统中,交织区是城市快速路网的重要组成部分,集中性换道行为使交织区成为限制快速路网安全和效率提升的主要瓶颈. 交织区交通冲突根本上是车辆对交织区有限时空资源的竞争,交织交通类型越多,交织区的复杂度越高,因此快速路上汇入和汇出交通混行的互通交织区[2] 在交通管理与控制上面临更大挑战. 城市快速路互通交织区内大量、复杂的交织行为往往导致车辆缓行甚至交通拥堵,且状况易蔓延至上游路段,导致严重后果. 对城市快速路互通交织区的换道行为特征进行深入研究,有利于准确掌握城市快速路互通交织区交通流的变化规律,也有利于评估交织区状态以制定有效的管理方案. 本研究聚焦城市快速路互通交织区换道行为的换道持续距离特征,分析影响换道车辆进行换道持续距离行为决策的影响因素,构建换道持续距离行为决策模型,为未来换道过程的深度影响评价奠定基础.
1. 研究现状
车辆交织行为的研究主要围绕交通安全、辅助决策、跟驰行为建模、换道行为建模等课题. Park等[7]利用车辆换道风险评估指数(lane change risk assessment index, LCRAI)评价了原始车道和目标车道上换道车辆与相邻前后车之间的相互作用;Shangguan等[8]将驾驶员的意图识别引入主动换道风险预测,以辅助驾驶员的换道决策,保证行车安全;王少杰等[9]基于实测轨迹数据进行车辆跟驰行为特性研究;Zhang等[10]采用长短期记忆神经网络同时模拟交通流中的跟驰和换道状态;曲昭伟等[11]构造了准确有效的基于最优速度模型的安全间距跟驰模型;李根等[12]基于梯度提升决策树建立了交织区汇合交互作用模型.
可以看出,交织行为的研究缺少对换道全过程持续时间和距离的关注,本文拟针对城市快速路互通交织区内车辆换道行为的换道持续距离展开研究.
2. 数据采集
数据采集点为南京市城东快速路互通交织区段,该交织区既有入口匝道,又有出口匝道,且交织车辆在换道时必须实现1个车道的转换. 如图1所示,城市快速路为单向三车道,辅路为单向两车道,研究区域长120 m. 使用无人机拍摄获取交织区连续7 d早高峰(7:30—8:30)的交通流视频,视频拍摄时天气晴朗. 拍摄视频的分辨率为1 920×1 080,帧率为30 帧/s. 视频中每帧的车辆轨迹数据由中佛罗里达大学SST实验室开发的自动道路冲突识别系统提取[17]. 经视频采集获取初始数据信息,包括帧数(以帧为步长)、车辆ID以及车辆前部、中心和后部的像素坐标. 航拍视频内共有2 241辆车,每辆车包含的车辆轨迹数据为200~300 条,共计获取车辆轨迹数据50 多万条,每条数据包含1辆车在当前时刻的全部信息. 采用仿射变换方法将像素坐标转换为笛卡尔坐标,以平行于车道线的方向为X轴,垂直车道线的方向为Y轴,具体过程可参考Zhao等[6]的研究成果.对获取的数据进行过滤,得到nv=478 辆车的完整变道行为数据,收集当前车道和目标车道上前后车辆的交通行为数据. 选择包括目标车道中没有车辆或者目标车道中前后车辆远离目标车辆100 m的情况,设置目标车道中的前后车辆与目标车辆的距离为零,即认为目标车辆前后无车. 目标车道上前后车辆距离的统计分布如图2所示,其中d为车辆间距,不包括零距离. 在换道过程中,共有56 辆车的目标车道上没有车辆在前,89 辆车的目标车道上没有车辆在后.
图 1

图 1 城市快速路互通交织区物理结构图
Fig.1 Physical structure of unban expressway interchange waving section
图 2
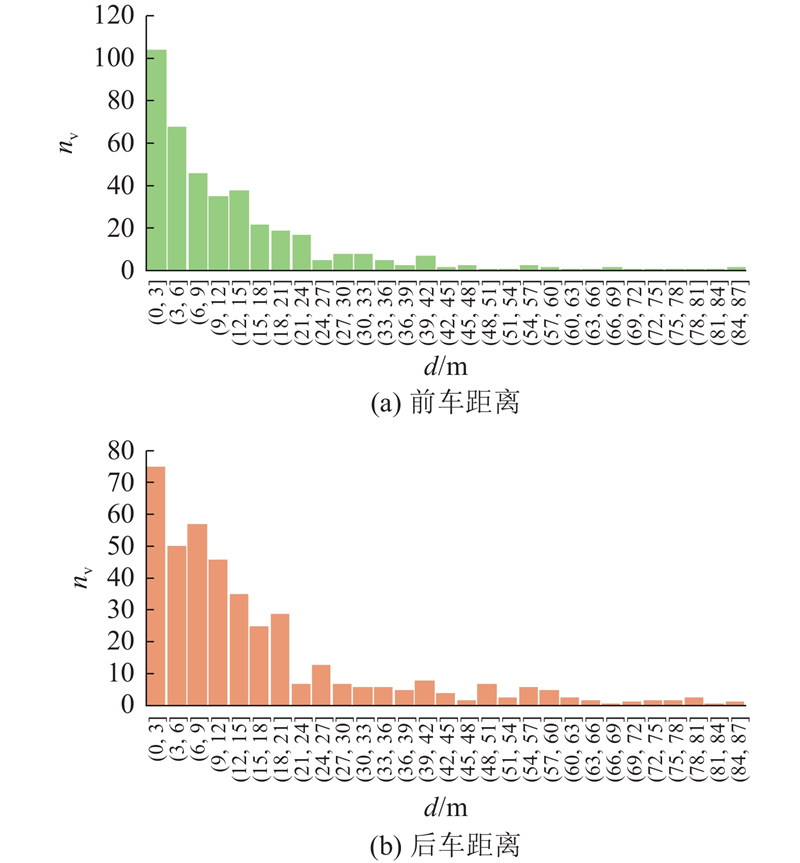
图 2 目标车道前、后车辆距离的统计分布
Fig.2 Statistical distribution of distances to front and rear vehicles in target lane
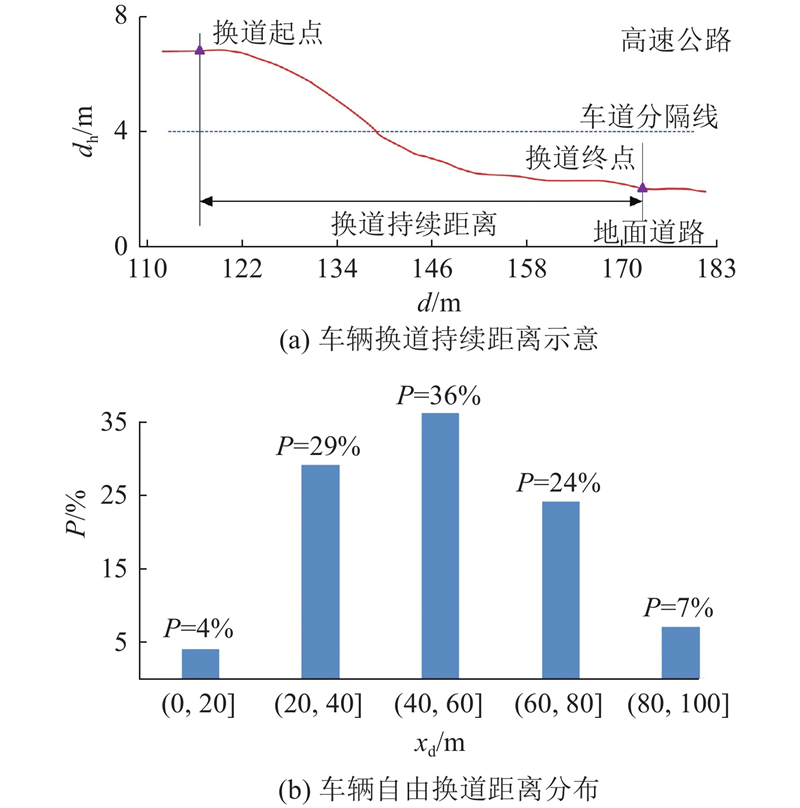
考虑到车辆轨迹的不稳定性,结合目标车辆的横向运动和在车道内的位置确定每种换道行为的起始点和完成点. 起始点定义为横向运动开始且车辆中心距离目标车道中心线三分之一车道宽度时的空间位置,完成点定义为横向运动尚未结束且车辆中心距离原始车道中心线三分之一车道宽度时的空间位置. 定义中选择车道宽度的三分之一的原因:确保目标车辆在当前车道内且不会影响相邻车道的交通. 如图3(a)所示为某换道车辆换道的完整轨迹,其中dh为横向位置. 可见,换道持续距离即为换道起点到换道终点沿车道方向上移动的距离. 如图3(b)所示为调查所得车辆的换道持续距离分布,其中xd为车辆的换道持续距离,最大值为97.4 m,最小值为10.7 m,平均换道持续距离为50.4 m,约90%换道车辆的换道持续距离在20~80 m.
图 3
3. 换道持续距离选择行为影响因素分析
3.1. 因果推断理论
因果推断被深入应用于社会行为研究中,它可以判断数据之间是否存在因果关系[18]. 因果推断过程可划分为4个部分:变量的因果关系、确定目标估计、进行因果效应估计、反驳估计.
采用Python中的DoWhy库进行因果图建模. DoWhy以贝叶斯网络模型框架构建因果推断问题,通过假设构建潜在的因果循环图. 在假设下识别因果估计量,对因果图的表达式进行再识别. 任何具有双向路径的图都可以通过划分构成联合概率分布的基本单元和影响其概率分布的因素,分解联合概率分布:
式中:P(v)为联合分布概率函数;Qj为影响其概率分布的因素. 使用统计的方法对式(1)进行因果效应估计,调用外部估计方法EconML实现复杂因果推断问题的自动化. 按照影响和不影响将特征Z划分为二分变量,当Z满足用于估计模型因果关系工具变量的条件时,工具变量的效应估计表示为
等式左边是X对Y的效应;等式右边的分子是Z对Y的效应,也称为治疗意向效应,Z是工具变量,Y是“果”;等式右边的分母是Z对X的效应,表示被试的配合程度,Z是工具变量,X是“因”. 对于反驳估计,使用稳定性检查验证估计的正确性. 用安慰剂数据代替真实的处理变量,安慰剂数据为随机生成的变量或者是对原处理变量进行不放回随机抽样产生的变量,即把真实结果变量替换为独立随机变量后判断因果效应是否改变,期望结果是因果效应归零[19].
3.2. 影响因素分析
表 1 换道持续距离选择行为的影响因素
Tab.1
| 符号 | 影响因素 | 符号 | 影响因素 | |
| ID | 车辆编号 | ar | 当前车道上后车加速度 | |
| v | 车辆速度 | aft | 目标车道上前车的加速度 | |
| a | 车辆加速度 | art | 目标车道上后车的加速度 | |
| v1 | 车辆变道后速度 | xf | 当前车道上与前车的距离 | |
| a1 | 车辆变道后加速度 | xr | 当前车道上与后车的距离 | |
| vf | 当前车道上前车速度 | xft | 目标车道上与前车的距离 | |
| vr | 当前车道上后车速度 | xrt | 目标车道上与后车的距离 | |
| vft | 目标车道上前车的速度 | xfr | 目标车道上前后车间的距离 | |
| vrt | 目标车道上后车的速度 | t | 车辆的换道持续时间 | |
| af | 当前车道上的前车加速度 | xd | 车辆的换道持续距离 |
图 4
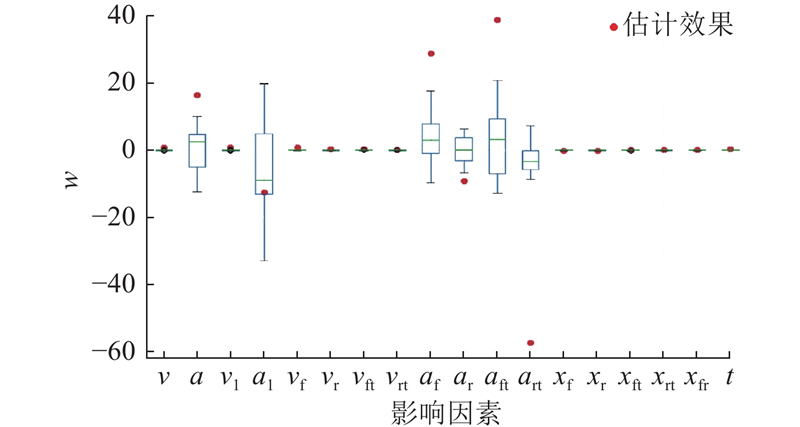
因果效应的反驳结果如图5所示. 图中,w为影响因素在反驳测试后的因果估计效应. 根据因果推断中的安慰剂反驳检验规则,可以估计每个影响因素与结果影响因素之间的因果效应[20],即除了因素a1外,其余因素的估计效果与使用安慰剂治疗的效果有显著差异. 使用安慰剂治疗时的效果往往为0,因此,这些因素对结果影响因素(换道持续距离)有因果影响. 根据不同水平对变量进行分类,利用正负因果效应进行识别,可以得到a、af、aft对结果影响因素具有正因果效应,ar、art对结果变量具有负因果效应. 由此得出:1)目标车辆换道前后的速度和换道持续时间对换道持续距离有显著影响,这符合交通流中的速度-距离-时间三参数关系;2)当前车道和目标车道的前后车速度对换道持续距离有显著影响,这可能是由于前后车和目标车之间相对速度的大小会给目标车或宽松或压抑的换道环境,影响了换道持续距离;3)当前车道和目标车道的前后车间距对换道持续距离有显著影响,这可能是由于前后车和目标车的间距决定了目标车换道时的自由度,影响了换道持续距离. 综合斯皮尔曼(Spearman)相关系数和因果推断分析结果,排除具有相互影响关系的因素,如vf和vr、vft和vrt的重复性,确定影响换道持续距离的因素为v、v1、vf、vft、xf、xr、xft、t.
图 5
4. 换道持续距离行为决策建模
4.1. 决策模型构建
选用2种机器学习方法:支持向量机和深度学习,进行换道持续距离行为决策建模.
4.1.1. 支持向量机预测模型
支持向量机是有监督的机器学习算法,算法的目标是寻找最佳决策边界. 模型的学习策略是区间最大化,可以作为解决凸二次规划问题(求解凸二次规划)的最佳算法. 交通流数据非线性,因此使用非线性支持向量机回归算法作为预测模型. 支持向量机模型将原始样本空间的非线性可分问题转换为特征空间的线性可分问题.训练数据集为
式中:
式中:
4.1.2. 深度学习预测模型
深度学习是多层神经网络模型,涉及大量的矢量计算,选择合适的输入层和输出层,通过学习和调整网络,建立从输入到输出的函数关系. 本研究采用三层神经网络的嵌套,为简单的前馈神经网络,将接受的输入传入下一层,并一层接一层地传递,最后输出. 学习框架选用Torch,采用线性层的拼接来实现模型的预测. 输入层的神经元数量等于数据的特征数量(影响因素数量);隐藏层层数为2,搭配线性整流函数ReLU,此激活函数可以表示任意精度的任意决策边界,还可以拟合任何精度的任何平滑映射;输出层神经元数量等于1. ReLU函数的计算式为
式中:x为输入值,h(x)为输出值. 损失函数Loss选用L1,假设输出值为
优化工具选用SGD和Adam[22],优化器根据网络反向传播的梯度信息来更新网络参数,起到降低损失函数值,使模型输出更加接近真实标签的作用. 通过模型训练,选取训练结果较优时的参数,即模型的学习率为1.0×10−3,权重衰减率为0.000 5.
4.1.3. 实验分组
车行轨迹数据包含478辆换道车辆. 换道数据的70%用于模型的训练,30%用于预测和模型验证. 为了测试因果分析对预测模型结果的影响,按照影响因素提取方式的差异形成2个实验组:1)经因果分析筛选后的显著影响因素,2)所有可能的影响因素. 2个实验组的数据规模一致.
4.2. 建模结果讨论
图 6
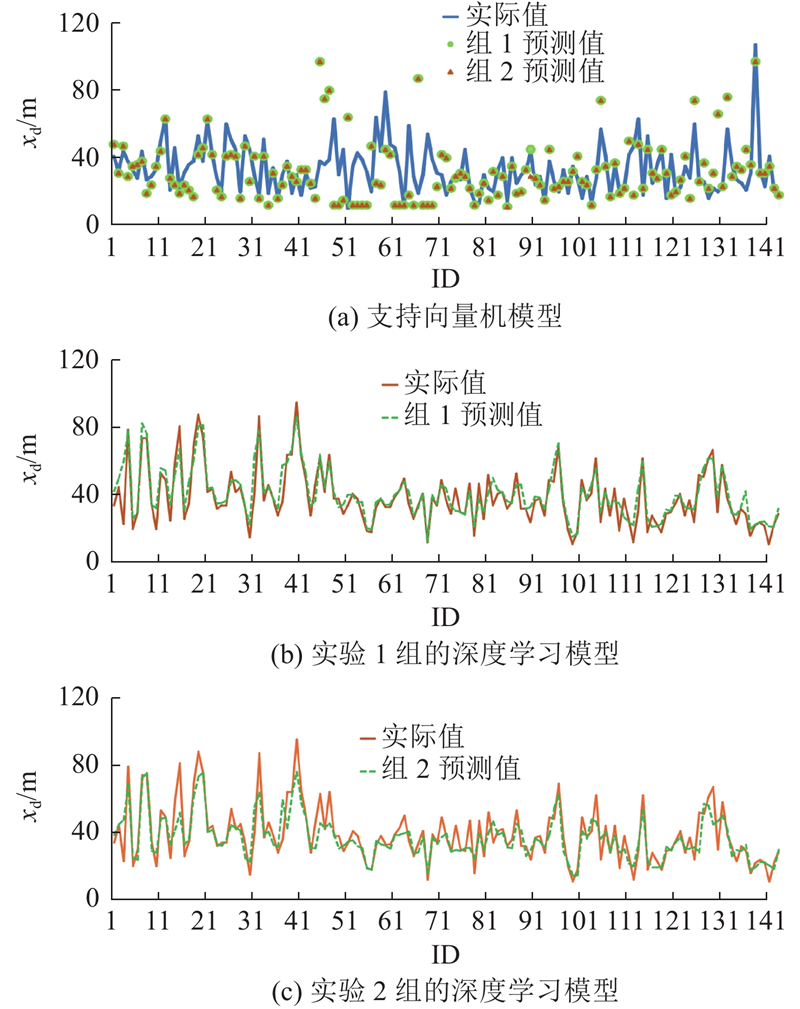
图 6 不同决策模型的预测结果对比
Fig.6 Comparison of predictions from different decision models
4.2.1. 不同影响因素下的预测结果对比
为了研究不同影响因素对预测结果的影响,选取预测时间tp、R2、MAE、RMSE以及MAE/RMSE作为评价指标. 模型预测时间为10 次运行时间的平均值;
2个实验组数据对支持向量机预测模型和深度学习预测模型的预测结果影响如图7所示. 在不同组数据情况下,支持向量机模型的运行时间分别为1.2、1.4 s,深度学习模型的运行时间分别为204.8、262.9 s,经筛选后的第1组数据集将支持向量机模型的运行效率提高了14%,将深度学习模型的运行效率提高了22%. 不同组数据支持向量机模型的R2、MAE、RMSE以及MAE/RMSE基本一致,可以认为预测结果没有显著性差异,深度学习模型的R2、MAE、RMSE存在显著差异,第1组数据集相较于第2组数据集,R2提升了10%,将MAE提升了18%,将RMSE提升了17%. 可以看出,经筛选后的影响因素能够提升模型的预测效率,也能够提升深度学习模型的预测精度,提升幅度为10%~20%,支持向量机模型的预测精度基本不受影响.
图 7
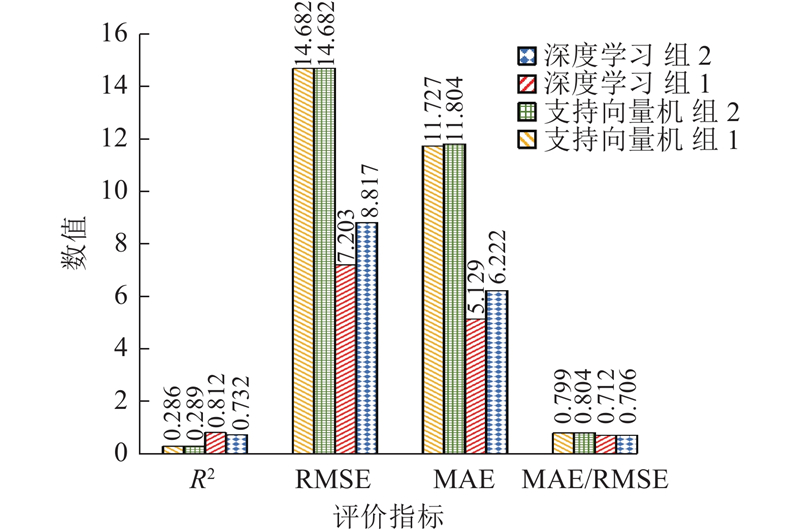
图 7 不同影响因素实验组的预测模型评价指标对比
Fig.7 Comparison of evaluation indicators of prediction models for experimental groups with different impact factors
4.2.2. 不同预测模型间的预测结果对比
2种预测模型均在第1组数据集下的预测精度更好,因此选用预测时间、R2、MAE、RMSE以及MAE/RMSE对比第1组下2种预测模型的预测结果,指标对比如图8所示. 从预测时间来看,支持向量机模型的训练速度很快,运行时间可以忽略不计,深度学习模型的训练时间为204.8 s;从R2、MAE、RMSE来看,深度学习模型预测精度比支持向量机模型预测精度高;从MAE/RMSE来看,2种模型的值相近,可认为2种模型的预测稳定性相似.
图 8
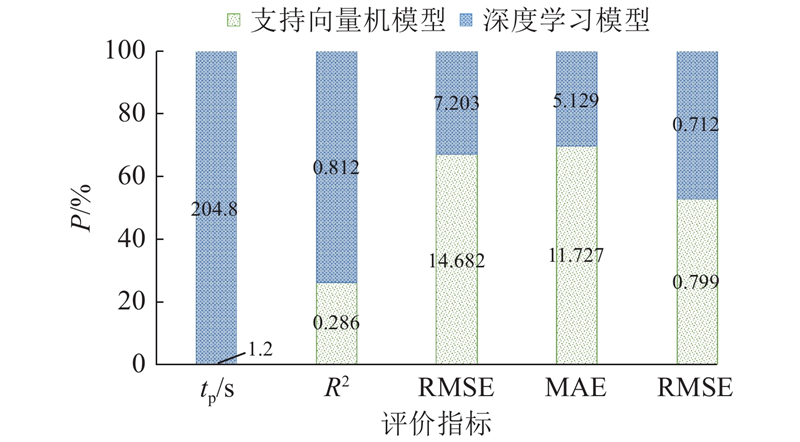
图 8 相同影响因素实验组2种预测模型的评价指标对比
Fig.8 Comparison of evaluation indicators of two prediction models for experimental groups with same influence factors
5. 结 论
(1)换道持续距离是车辆变道过程的主要参数,90%的车辆换道持续距离集中在20~80 m,有关换道行为的研究将换道过程视为瞬态交通行为,这会忽视换道过程对交通流的影响.
(2)影响因素分析表明,影响换道持续距离选择的因素主要包括换道前后目标车辆的速度和持续时间,以及目标车辆前后车辆在当前车道和目标车道上的速度和距离,目标车辆和周围车辆的加速度对换道持续距离的影响较小.
(3)对比不同影响因素对换道持续距离建模的影响发现,筛选出的影响因素可以提高模型的预测速度,深度学习模型的预测精度提高了10%~20%,支持向量机模型的预测精度基本不受影响. 换道持续距离影响因素筛选对换道行为建模起正向改进作用,但对不同换道行为模型的改善程度不同.
(4)比较2种预测模型对换道持续距离的预测结果发现,支持向量机模型的预测速度更快,深度学习模型的预测精度更高,2种模型的预测稳定性相似.
换道行为是影响交织区交通安全和效率的主要交通行为,换道过程会同时对多条车道的车辆造成影响,现有研究常常将换道过程视为瞬态交通行为,因此对换道过程特征的深入剖析对换道行为的行为决策和影响机理研究至关重要. 研究换道持续距离可深化换道行为的理论,还可以提高交通仿真模型中针对换道行为的行为模型准确性,为交通流研究提供真实的仿真环境. 本研究以城市快速路互通交织区为背景环境,分析了刚性换道行为的换道过程特征. 其他类型交织区环境或换道行为的换道持续距离是否符合与本研究同样的规律,是否在行为决策过程中受到更多因素的影响,都值得进一步拓展研究. 此外,换道持续距离的深度剖析是否有助于优化换道行为的研究成果或改进相关仿真模型,其他前沿换道行为模型是否同样会受到影响因素筛选的影响,也有待深入探讨.
参考文献
Instantaneous lane-changing type aware lane change prediction based on LSTM in mixed traffic scenario
[J].DOI:10.1142/S0218126622501808 [本文引用: 1]
Traffic safety analysis of inter-tunnel weaving section with conflict prediction models
[J].
基于换道时间分布的交通流随机微分方程
[J].
Stochastic differential equation of traffic flow model based on distribution of lane-changing duration
[J].
Modeling and predicting stochastic merging behaviors at freeway on-ramp bottlenecks
[J].
Comparison of different models for evaluating vehicle collision risks at upstream diverging area of toll plaza
[J].DOI:10.1016/j.aap.2019.105343 [本文引用: 1]
Trajectory-based characteristic analysis and decision modeling of the lane-changing process in intertunnel weaving sections
[J].DOI:10.1371/journal.pone.0266489 [本文引用: 4]
Development of a lane change risk index using vehicle trajectory data
[J].DOI:10.1016/j.aap.2017.10.015 [本文引用: 1]
A proactive lane-changing risk prediction framework considering driving intention recognition and different lane-changing patterns
[J].DOI:10.1016/j.aap.2021.106500 [本文引用: 1]
面向数据驱动的车辆跟驰行为建模
[J].DOI:10.3969/j.issn.1002-0268.2023.11.026 [本文引用: 1]
Modeling of car-following behavior based on data-driven method
[J].DOI:10.3969/j.issn.1002-0268.2023.11.026 [本文引用: 1]
Simultaneous modeling of car-following and lane-changing behaviors using deep learning
[J].DOI:10.1016/j.trc.2019.05.021 [本文引用: 2]
基于最优速度模型的改进安全距离跟驰模型
[J].
Car-following model with improving safety distance based on optimal velocity model
[J].
基于梯度提升决策树的汇合交互作用研究
[J].
Study of merging interactions based on gradient boosting decision tree
[J].
基于虚拟车道线的智能车辆换道轨迹规划方法
[J].
Lane change trajectory planning method of intelligent vehicle based on virtual lane
[J].
An improved car-following model with consideration of multiple preceding and following vehicles in a driver’s view
[J].DOI:10.1016/j.physa.2019.122967 [本文引用: 1]
Lane-changing decision method based Nash Q-learning with considering the interaction of surrounding vehicles
[J].DOI:10.1049/iet-its.2020.0427 [本文引用: 1]
An extreme value theory approach to estimate crash risk during mandatory lane-changing in a connected environment
[J].DOI:10.1016/j.amar.2021.100193 [本文引用: 1]
因果推断三种分析框架及其应用综述
[J].DOI:10.3321/j.issn.1001-053X.2022.7.bjkjdxxb202207013 [本文引用: 1]
Three analytical frameworks of causal inference and their applications
[J].DOI:10.3321/j.issn.1001-053X.2022.7.bjkjdxxb202207013 [本文引用: 1]
因果关系学习的思维取向和概念分析
[J].DOI:10.3969/j.issn.1005-0450.2021.10.007 [本文引用: 1]
Thinking orientation and conceptual analysis of causal relationship learning
[J].DOI:10.3969/j.issn.1005-0450.2021.10.007 [本文引用: 1]
A causal inference–based speed control framework for discretionary lane-changing processes
[J].
分形理论下支持向量机核函数选择
[J].DOI:10.3969/j.issn.1671-1815.2019.13.021 [本文引用: 1]
Research on selection of kernel function of SVM under fractal theory
[J].DOI:10.3969/j.issn.1671-1815.2019.13.021 [本文引用: 1]
带有微分项改进的自适应梯度下降优化算法
[J].DOI:10.7641/CTA.2021.10061 [本文引用: 1]
Adaptive gradient descent optimization algorithm with improved differential terms
[J].DOI:10.7641/CTA.2021.10061 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}