[1]
贾兴利, 富志鹏, 许金良, 等 高速公路半幅封闭施工区限速标志效能试验
[J]. 交通运输工程学报 , 2015 , 15 (4 ): 93 - 100
[本文引用: 1]
JIA Xingli, FU Zhipeng, XU Jinliang, et al Effectiveness test of speed-limit sign in one-way closed work zone for expressway
[J]. Journal of Traffic and Transportation Engineering , 2015 , 15 (4 ): 93 - 100
[本文引用: 1]
[2]
United States Department of Transportation National Highway Traffic Safety Administration. Traffic safety facts 2019 [R]. Washington: National Highway Traffic Safety Administration, 2021.
[本文引用: 1]
[3]
AL-BAYATI A J, ALI M, NNAJI C Managing work zone safety during road maintenance and construction activities: challenges and opportunities
[J]. Practice Periodical on Structural Design and Construction , 2023 , 28 (1 ): 04022068
DOI:10.1061/PPSCFX.SCENG-1212
[本文引用: 1]
[4]
NNAJI C, GAMBATESE J, LEE H W, et al Improving construction work zone safety using technology: a systematic review of applicable technologies
[J]. Journal of Traffic and Transportation Engineering: English edition , 2020 , 7 (1 ): 61 - 75
DOI:10.1016/j.jtte.2019.11.001
[本文引用: 1]
[5]
中华人民共和国国务院安全生产委员会. 国务院安全生产委员会关于印发道路交通安全“十三五”规划的通知[EB/OL]. (2017-08-08) [2023-05-22]. https://www.mem.gov.cn/gk/gwgg/agwzlfl/tz_01/201709/t20170907_235227.shtml.
[本文引用: 1]
[6]
PRAMANIK A, SARKAR S, MAITI J A real-time video surveillance system for traffic pre-events detection
[J]. Accident Analysis and Prevention , 2021 , 154 : 106019
DOI:10.1016/j.aap.2021.106019
[本文引用: 1]
[7]
HAGHIGHAT A, SHARMA A A computer vision-based deep learning model to detect wrong-way driving using pan-tilt-zoom traffic cameras
[J]. Computer-Aided Civil and Infrastructure Engineering , 2023 , 38 (1 ): 119 - 132
DOI:10.1111/mice.12819
[本文引用: 1]
[8]
HU L, OU J, HUANG J, et al Safety evaluation of pedestrian-vehicle interaction at signalized intersections in Changsha, China
[J]. Journal of Transportation Safety and Security , 2022 , 14 (10 ): 1750 - 1775
DOI:10.1080/19439962.2021.1960662
[本文引用: 1]
[9]
PAUL S A, NICOLAS S, LUIS M M Large-scale automated proactive road safety analysis using video data
[J]. Transportation Research Part C: Emerging Technologies , 2015 , 58 : 363 - 379
DOI:10.1016/j.trc.2015.04.007
[本文引用: 1]
[10]
AHMED M M, ABDEL-ATY M, LEE J, et al Real-time assessment of fog-related crashes using airport weather data: a feasibility analysis
[J]. Accident Analysis and Prevention , 2014 , 72 : 309 - 317
DOI:10.1016/j.aap.2014.07.004
[本文引用: 1]
[11]
ABDEL-ATY M A, PEMMANABOINA R Calibrating a real-time traffic crash-prediction model using archived weather and ITS traffic data
[J]. IEEE Transactions on Intelligent Transportation Systems , 2006 , 7 (2 ): 167 - 174
DOI:10.1109/TITS.2006.874710
[本文引用: 1]
[12]
GUO Y, MA J Leveraging existing high-occupancy vehicle lanes for mixed-autonomy traffic management with emerging connected automated vehicle applications
[J]. Transportmetrica A: Transport Science , 2020 , 16 (3 ): 1375 - 1399
DOI:10.1080/23249935.2020.1720863
[本文引用: 1]
[13]
WEN J, WU C, ZHANG R, et al Rear-end collision warning of connected automated vehicles based on a novel stochastic local multivehicle optimal velocity model
[J]. Accident Analysis and Prevention , 2020 , 148 : 105800
DOI:10.1016/j.aap.2020.105800
[本文引用: 1]
[14]
YANG Y, He K, WANG Y, et al Identification of dynamic traffic crash risk for cross-area freeways based on statistical and machine learning methods
[J]. Physica A: Statistical Mechanics and its Applications , 2022 , 595 : 127083
DOI:10.1016/j.physa.2022.127083
[本文引用: 1]
[15]
GUO M, ZHAO X, YAO Y, et al A study of freeway crash risk prediction and interpretation based on risky driving behavior and traffic flow data
[J]. Accident Analysis and Prevention , 2021 , 160 : 106328
DOI:10.1016/j.aap.2021.106328
[本文引用: 1]
[16]
NOH B, YEO H A novel method of predictive collision risk area estimation for proactive pedestrian accident prevention system in urban surveillance infrastructure
[J]. Transportation Research part C: Emerging Technologies , 2022 , 137 : 103570
DOI:10.1016/j.trc.2022.103570
[本文引用: 1]
[17]
ALI Y, HAQUE M M, MANNERING F A Bayesian generalised extreme value model to estimate real-time pedestrian crash risks at signalised intersections using artificial intelligence-based video analytics
[J]. Analytic Methods in Accident Research , 2023 , 38 : 100264
DOI:10.1016/j.amar.2022.100264
[本文引用: 1]
[18]
中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 道路交通标志和标线第4部分: 作业区: GB 5768.4−2017 [S]. 北京: 中国标准出版社, 2017.
[本文引用: 1]
[19]
MENG Q, WENG J Evaluation of rear-end crash risk at work zone using work zone traffic data
[J]. Accident Analysis and Prevention , 2011 , 43 (4 ): 1291 - 1300
DOI:10.1016/j.aap.2011.01.011
[本文引用: 1]
[20]
ZHANG C, WANG B, YANG S, et al. The driving risk analysis and evaluation in rightward zone of expressway reconstruction and extension engineering [EB/OL]. [2024-03-22]. https://doi.org/10.1155/2020/8943463.
[本文引用: 1]
[22]
KIM J, SUNG J Y, PARK S. Comparison of Faster-RCNN, YOLO, and SSD for real-time vehicle type recognition [C]// 2020 IEEE International Conference on Consumer Electronics-Asia . Seoul: IEEE, 2020: 1−4.
[本文引用: 1]
[23]
MAITY M, BANERJEE S, CHAUDHURI S S. Faster R-CNN and YOLO based vehicle detection: a survey [C]// 2021 5th International Conference on Computing Methodologies and Communication . Erode: IEEE, 2021: 1442-1447.
[本文引用: 1]
[24]
DU Y, ZHAO Z, SONG Y, et al. Strongsort: make deepsort great again [EB/OL]. (2023-01-31) [2023-05-22]. https://ieeexplore.ieee.org/abstract/document/10032656.
[本文引用: 1]
[25]
SONG K T, TAI J C Dynamic calibration of pan-tilt-zoom cameras for traffic monitoring
[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics) , 2006 , 36 (5 ): 1091 - 1103
DOI:10.1109/TSMCB.2006.872271
[本文引用: 1]
[26]
ZHANG X, FENG Y, ANGELOUDIS P, et al Monocular visual traffic surveillance: a review
[J]. IEEE Transactions on Intelligent Transportation Systems , 2022 , 23 (9 ): 14148 - 14165
DOI:10.1109/TITS.2022.3147770
[本文引用: 1]
[27]
中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 道路交通标志和标线 第3部分: 道路交通标线: GB 5768.3—2009 [S]. 北京: 中国标准出版社, 2009.
[本文引用: 1]
[28]
中华人民共和国交通运输部. 公路工程技术标准: JTGB01—2014 [S]. 北京: 人民交通出版社, 2014.
[本文引用: 1]
[29]
KANHERE N K, BIRCHFIELD S T A taxonomy and analysis of camera calibration methods for traffic monitoring applications
[J]. IEEE Transactions on Intelligent Transportation Systems , 2010 , 11 (2 ): 441 - 452
DOI:10.1109/TITS.2010.2045500
[本文引用: 1]
[30]
WANG K, HUANG H, LI Y, et al. Research on lane-marking line based camera calibration [C]// 2007 IEEE International Conference on Vehicular Electronics and Safety . Beijing: IEEE, 2007: 1−6.
[本文引用: 1]
[31]
KIM S, HWANG Y A survey on deep learning based methods and datasets for monocular 3D object detection
[J]. Electronics , 2021 , 10 (4 ): 517
DOI:10.3390/electronics10040517
[本文引用: 1]
[32]
宋焕生, 张文涛, 孙勇, 等 高速公路相机自动标定及道路坐标系构建
[J]. 中国公路学报 , 2022 , 35 (9 ): 90 - 103
SONG Huansheng, ZHANG Wentao, SUN Yong, et al Automatic camera calibration and road coordinate system construction in highways
[J]. China Journal of High-way and Transport , 2022 , 35 (9 ): 90 - 103
[33]
王伟, 唐心瑶, 崔华, 等 基于CenterNet的路侧单目视角车辆3D形态精确感知
[J]. 中国公路学报 , 2022 , 35 (9 ): 104 - 118
[本文引用: 1]
WANG Wei, TANG Xinyao, CUI Hua, et al Accurate perception of three-dimensional vehicle form in roadside monocular perspective based on CenterNet
[J]. China Journal of Highway and Transport , 2022 , 35 (9 ): 104 - 118
[本文引用: 1]
[34]
DUBSKÁ M, HEROUT A, SOCHOR J. Automatic camera calibration for traffic understanding [C]// 2014 British Machine Vision Conference . Nottingham: BMVC, 2014, 4(6): 8.
[本文引用: 1]
[35]
MAHMUD S M S, FERREIRA L, HOQUE M S, et al Application of proximal surrogate indicators for safety evaluation: a review of recent developments and research needs
[J]. IATSS Research , 2017 , 41 (4 ): 153 - 163
DOI:10.1016/j.iatssr.2017.02.001
[本文引用: 1]
[36]
SHI X, WONG Y D, LI M Z F, et al Key risk indicators for accident assessment conditioned on pre-crash vehicle trajectory
[J]. Accident Analysis and Prevention , 2018 , 117 : 346 - 356
DOI:10.1016/j.aap.2018.05.007
[本文引用: 1]
[37]
CALIENDO C, GUIDA M Microsimulation approach for predicting crashes at unsignalized intersections using traffic conflicts
[J]. Journal of transportation engineering , 2012 , 138 (12 ): 1453 - 1467
DOI:10.1061/(ASCE)TE.1943-5436.0000473
[本文引用: 1]
[38]
WANG C, XU C, DAI Y A crash prediction method based on bivariate extreme value theory and video-based vehicle trajectory data
[J]. Accident Analysis and Prevention , 2019 , 123 : 365 - 373
DOI:10.1016/j.aap.2018.12.013
[本文引用: 1]
[39]
ZHENG L, ISMAIL K, MENG X Traffic conflict techniques for road safety analysis: open questions and some insights
[J]. Canadian Journal of Civil Engineering , 2014 , 41 (7 ): 633 - 641
DOI:10.1139/cjce-2013-0558
[本文引用: 1]
[40]
FILDES B N, RUMBOLD G, LEENING A. Speed behaviour and drivers’ attitude to speeding [R]. Melbourne: Monash University Accident Research Centre, 1991.
[本文引用: 1]
[41]
HU Y, LI Y, HUANG H, et al A high-resolution trajectory data driven method for real-time evaluation of traffic safety
[J]. Accident Analysis and Prevention , 2022 , 165 : 106503
DOI:10.1016/j.aap.2021.106503
[本文引用: 1]
[42]
LAVRENZ S M, VLAHOGIANNI E I, GKRITZA K, et al Time series modeling in traffic safety research
[J]. Accident Analysis and Prevention , 2018 , 117 : 368 - 380
DOI:10.1016/j.aap.2017.11.030
[本文引用: 1]
[43]
LANA I, DEL Ser J, VELEZ M, et al Road traffic forecasting: Recent advances and new challenges
[J]. IEEE Intelligent Transportation Systems Magazine , 2018 , 10 (2 ): 93 - 109
DOI:10.1109/MITS.2018.2806634
[本文引用: 1]
[44]
WANG K, MA C, QIAO Y, et al A hybrid deep learning model with 1DCNN-LSTM-Attention networks for short-term traffic flow prediction
[J]. Physica A: Statistical Mechanics and its Applications , 2021 , 583 : 126293
DOI:10.1016/j.physa.2021.126293
[本文引用: 1]
[45]
HUA C, FAN W D. Freeway traffic speed prediction under the intelligent driving environment: a deep learning approach [EB/OL]. [2024-03-22]. https://doi.org/10.1155/2022/6888115.
[本文引用: 1]
[46]
ZHAO J, YANG X, ZHANG C. Vehicle trajectory reconstruction for intersections: an integrated wavelet transform and Savitzky-Golay filter approach [J]. Transportmetrica A: Transport Science , 2024, 20(2): 2163207.
[本文引用: 1]
[47]
FU C, SAYED T Comparison of threshold determination methods for the deceleration rate to avoid a crash (DRAC)-based crash estimation
[J]. Accident Analysis and Prevention , 2021 , 153 : 106051
DOI:10.1016/j.aap.2021.106051
[本文引用: 1]
[48]
SAYED T, BROWN G, NAVIN F Simulation of traffic conflicts at unsignalized intersections with TSC-Sim
[J]. Accident Analysis and Prevention , 1994 , 26 (5 ): 593 - 607
DOI:10.1016/0001-4575(94)90021-3
[本文引用: 1]
[49]
SHBEEB L. Development of traffic conflicts technique for different environments: a comparative study of pedestrian conflicts in Sweden and Jordan [D]. Lund: Lund University, 2000.
[本文引用: 1]
高速公路半幅封闭施工区限速标志效能试验
1
2015
... 随着我国高速公路的运营时间和交通量持续增长,公路养护的需求日益增加. 养护作业区的设置愈发频繁. 这些区域内的频繁换道和制动不仅提高了车辆碰撞风险,还可能导致车辆误入,引发对工作人员的伤害[1 ] . 作业区路段已成为高速公路运营安全的重要隐患. 根据美国国家公路交通安全管理局的统计数据,2019年作业区内交通事故共导致842 人死亡[2 ] . 现行安全措施,如标志预警和限速,常常难以满足实际安全需求[3 ] . 减速系统、动态表征系统和入侵警告系统等新兴技术,为突破安全管理效果的瓶颈提供了新的机遇. 监测和预警碰撞风险是实现主动避险的关键[4 ] . 截至2020年底,中国高速公路已基本实现监控全覆盖[5 ] . 受益于监控设备和计算机视觉的进步,闭路电视监控(closed-circuit television, CCTV)系统能够提供更准确的车辆信息. 因此,研究基于道路监控信息的作业区碰撞风险的监测和预警方法,对于提高公路行车安全具有重要意义. ...
高速公路半幅封闭施工区限速标志效能试验
1
2015
... 随着我国高速公路的运营时间和交通量持续增长,公路养护的需求日益增加. 养护作业区的设置愈发频繁. 这些区域内的频繁换道和制动不仅提高了车辆碰撞风险,还可能导致车辆误入,引发对工作人员的伤害[1 ] . 作业区路段已成为高速公路运营安全的重要隐患. 根据美国国家公路交通安全管理局的统计数据,2019年作业区内交通事故共导致842 人死亡[2 ] . 现行安全措施,如标志预警和限速,常常难以满足实际安全需求[3 ] . 减速系统、动态表征系统和入侵警告系统等新兴技术,为突破安全管理效果的瓶颈提供了新的机遇. 监测和预警碰撞风险是实现主动避险的关键[4 ] . 截至2020年底,中国高速公路已基本实现监控全覆盖[5 ] . 受益于监控设备和计算机视觉的进步,闭路电视监控(closed-circuit television, CCTV)系统能够提供更准确的车辆信息. 因此,研究基于道路监控信息的作业区碰撞风险的监测和预警方法,对于提高公路行车安全具有重要意义. ...
1
... 随着我国高速公路的运营时间和交通量持续增长,公路养护的需求日益增加. 养护作业区的设置愈发频繁. 这些区域内的频繁换道和制动不仅提高了车辆碰撞风险,还可能导致车辆误入,引发对工作人员的伤害[1 ] . 作业区路段已成为高速公路运营安全的重要隐患. 根据美国国家公路交通安全管理局的统计数据,2019年作业区内交通事故共导致842 人死亡[2 ] . 现行安全措施,如标志预警和限速,常常难以满足实际安全需求[3 ] . 减速系统、动态表征系统和入侵警告系统等新兴技术,为突破安全管理效果的瓶颈提供了新的机遇. 监测和预警碰撞风险是实现主动避险的关键[4 ] . 截至2020年底,中国高速公路已基本实现监控全覆盖[5 ] . 受益于监控设备和计算机视觉的进步,闭路电视监控(closed-circuit television, CCTV)系统能够提供更准确的车辆信息. 因此,研究基于道路监控信息的作业区碰撞风险的监测和预警方法,对于提高公路行车安全具有重要意义. ...
Managing work zone safety during road maintenance and construction activities: challenges and opportunities
1
2023
... 随着我国高速公路的运营时间和交通量持续增长,公路养护的需求日益增加. 养护作业区的设置愈发频繁. 这些区域内的频繁换道和制动不仅提高了车辆碰撞风险,还可能导致车辆误入,引发对工作人员的伤害[1 ] . 作业区路段已成为高速公路运营安全的重要隐患. 根据美国国家公路交通安全管理局的统计数据,2019年作业区内交通事故共导致842 人死亡[2 ] . 现行安全措施,如标志预警和限速,常常难以满足实际安全需求[3 ] . 减速系统、动态表征系统和入侵警告系统等新兴技术,为突破安全管理效果的瓶颈提供了新的机遇. 监测和预警碰撞风险是实现主动避险的关键[4 ] . 截至2020年底,中国高速公路已基本实现监控全覆盖[5 ] . 受益于监控设备和计算机视觉的进步,闭路电视监控(closed-circuit television, CCTV)系统能够提供更准确的车辆信息. 因此,研究基于道路监控信息的作业区碰撞风险的监测和预警方法,对于提高公路行车安全具有重要意义. ...
Improving construction work zone safety using technology: a systematic review of applicable technologies
1
2020
... 随着我国高速公路的运营时间和交通量持续增长,公路养护的需求日益增加. 养护作业区的设置愈发频繁. 这些区域内的频繁换道和制动不仅提高了车辆碰撞风险,还可能导致车辆误入,引发对工作人员的伤害[1 ] . 作业区路段已成为高速公路运营安全的重要隐患. 根据美国国家公路交通安全管理局的统计数据,2019年作业区内交通事故共导致842 人死亡[2 ] . 现行安全措施,如标志预警和限速,常常难以满足实际安全需求[3 ] . 减速系统、动态表征系统和入侵警告系统等新兴技术,为突破安全管理效果的瓶颈提供了新的机遇. 监测和预警碰撞风险是实现主动避险的关键[4 ] . 截至2020年底,中国高速公路已基本实现监控全覆盖[5 ] . 受益于监控设备和计算机视觉的进步,闭路电视监控(closed-circuit television, CCTV)系统能够提供更准确的车辆信息. 因此,研究基于道路监控信息的作业区碰撞风险的监测和预警方法,对于提高公路行车安全具有重要意义. ...
1
... 随着我国高速公路的运营时间和交通量持续增长,公路养护的需求日益增加. 养护作业区的设置愈发频繁. 这些区域内的频繁换道和制动不仅提高了车辆碰撞风险,还可能导致车辆误入,引发对工作人员的伤害[1 ] . 作业区路段已成为高速公路运营安全的重要隐患. 根据美国国家公路交通安全管理局的统计数据,2019年作业区内交通事故共导致842 人死亡[2 ] . 现行安全措施,如标志预警和限速,常常难以满足实际安全需求[3 ] . 减速系统、动态表征系统和入侵警告系统等新兴技术,为突破安全管理效果的瓶颈提供了新的机遇. 监测和预警碰撞风险是实现主动避险的关键[4 ] . 截至2020年底,中国高速公路已基本实现监控全覆盖[5 ] . 受益于监控设备和计算机视觉的进步,闭路电视监控(closed-circuit television, CCTV)系统能够提供更准确的车辆信息. 因此,研究基于道路监控信息的作业区碰撞风险的监测和预警方法,对于提高公路行车安全具有重要意义. ...
A real-time video surveillance system for traffic pre-events detection
1
2021
... 当前基于道路监控的交通安全应用研究主要分为2类:事件检测和交通冲突检测. 事件检测方面的研究已相对成熟,并已在一些智能交通系统中得到广泛应用. Pramanik等[6 ] 将异常交通事件(超速、逆行、异常停车等)作为交通事故的事前指标,提出用于交通事前检测的实时视频监控系统框架. Haghighat等[7 ] 在CCTV系统基础上,结合YOLOv3和SORT算法提出能够自动校准的逆向驾驶实时检测预警系统. 在交通冲突检测方面,相关研究主要集中在城市道路交叉口区域. Hu等[8 ] 采用轨迹跟踪软件Traker分析长沙市6个交叉口的交通监控视频,根据交通冲突分布评估主要致因,并提出针对性改善措施建议. Paul等[9 ] 针对环形交叉路口的交通冲突问题,结合既有CCTV系统和消费级摄像头,以交通冲突指标监测碰撞风险,利用OpenCV算法构建的开源Traffic Intelligence程序实现风险监测和分析. ...
A computer vision-based deep learning model to detect wrong-way driving using pan-tilt-zoom traffic cameras
1
2023
... 当前基于道路监控的交通安全应用研究主要分为2类:事件检测和交通冲突检测. 事件检测方面的研究已相对成熟,并已在一些智能交通系统中得到广泛应用. Pramanik等[6 ] 将异常交通事件(超速、逆行、异常停车等)作为交通事故的事前指标,提出用于交通事前检测的实时视频监控系统框架. Haghighat等[7 ] 在CCTV系统基础上,结合YOLOv3和SORT算法提出能够自动校准的逆向驾驶实时检测预警系统. 在交通冲突检测方面,相关研究主要集中在城市道路交叉口区域. Hu等[8 ] 采用轨迹跟踪软件Traker分析长沙市6个交叉口的交通监控视频,根据交通冲突分布评估主要致因,并提出针对性改善措施建议. Paul等[9 ] 针对环形交叉路口的交通冲突问题,结合既有CCTV系统和消费级摄像头,以交通冲突指标监测碰撞风险,利用OpenCV算法构建的开源Traffic Intelligence程序实现风险监测和分析. ...
Safety evaluation of pedestrian-vehicle interaction at signalized intersections in Changsha, China
1
2022
... 当前基于道路监控的交通安全应用研究主要分为2类:事件检测和交通冲突检测. 事件检测方面的研究已相对成熟,并已在一些智能交通系统中得到广泛应用. Pramanik等[6 ] 将异常交通事件(超速、逆行、异常停车等)作为交通事故的事前指标,提出用于交通事前检测的实时视频监控系统框架. Haghighat等[7 ] 在CCTV系统基础上,结合YOLOv3和SORT算法提出能够自动校准的逆向驾驶实时检测预警系统. 在交通冲突检测方面,相关研究主要集中在城市道路交叉口区域. Hu等[8 ] 采用轨迹跟踪软件Traker分析长沙市6个交叉口的交通监控视频,根据交通冲突分布评估主要致因,并提出针对性改善措施建议. Paul等[9 ] 针对环形交叉路口的交通冲突问题,结合既有CCTV系统和消费级摄像头,以交通冲突指标监测碰撞风险,利用OpenCV算法构建的开源Traffic Intelligence程序实现风险监测和分析. ...
Large-scale automated proactive road safety analysis using video data
1
2015
... 当前基于道路监控的交通安全应用研究主要分为2类:事件检测和交通冲突检测. 事件检测方面的研究已相对成熟,并已在一些智能交通系统中得到广泛应用. Pramanik等[6 ] 将异常交通事件(超速、逆行、异常停车等)作为交通事故的事前指标,提出用于交通事前检测的实时视频监控系统框架. Haghighat等[7 ] 在CCTV系统基础上,结合YOLOv3和SORT算法提出能够自动校准的逆向驾驶实时检测预警系统. 在交通冲突检测方面,相关研究主要集中在城市道路交叉口区域. Hu等[8 ] 采用轨迹跟踪软件Traker分析长沙市6个交叉口的交通监控视频,根据交通冲突分布评估主要致因,并提出针对性改善措施建议. Paul等[9 ] 针对环形交叉路口的交通冲突问题,结合既有CCTV系统和消费级摄像头,以交通冲突指标监测碰撞风险,利用OpenCV算法构建的开源Traffic Intelligence程序实现风险监测和分析. ...
Real-time assessment of fog-related crashes using airport weather data: a feasibility analysis
1
2014
... 与事件检测和交通冲突检测相比,碰撞风险的预警技术仍处于发展阶段. 目前相关研究主要围绕气象、交通流和车联网数据进行. 基于气象信息的预警研究重点关注不良天气与行车安全的关联性[10 -11 ] . 尽管这种方法较为可靠,但其难以具体针对某一局部路段的安全性进行提升. 得益于车联网技术高效的数据采集和交互能力,基于该技术的碰撞风险预警多关注于车辆间的交互关系[12 -13 ] . 然而,面对人工驾驶环境,基于交通流特性的碰撞风险预警技术更为适用. Yang等[14 ] 利用机器学习技术,构建了山区和城市区域的交通事故风险识别模型,重点考虑了流量、变道行为、速度等特征. Guo等[15 ] 基于车载AutoNavigator软件获取的数据,开发了基于危险驾驶行为和交通流量的交通事故风险预测模型,其预警准确率为84.48%. 有学者试图基于CCTV系统实施碰撞风险预警,但由于城市交通的复杂性,通常只能提前几秒到十几秒发出预警[16 -17 ] . 而高速公路具有封闭性,受外部因素干扰较少,因此在提前预警方面具有更大的潜力. ...
Calibrating a real-time traffic crash-prediction model using archived weather and ITS traffic data
1
2006
... 与事件检测和交通冲突检测相比,碰撞风险的预警技术仍处于发展阶段. 目前相关研究主要围绕气象、交通流和车联网数据进行. 基于气象信息的预警研究重点关注不良天气与行车安全的关联性[10 -11 ] . 尽管这种方法较为可靠,但其难以具体针对某一局部路段的安全性进行提升. 得益于车联网技术高效的数据采集和交互能力,基于该技术的碰撞风险预警多关注于车辆间的交互关系[12 -13 ] . 然而,面对人工驾驶环境,基于交通流特性的碰撞风险预警技术更为适用. Yang等[14 ] 利用机器学习技术,构建了山区和城市区域的交通事故风险识别模型,重点考虑了流量、变道行为、速度等特征. Guo等[15 ] 基于车载AutoNavigator软件获取的数据,开发了基于危险驾驶行为和交通流量的交通事故风险预测模型,其预警准确率为84.48%. 有学者试图基于CCTV系统实施碰撞风险预警,但由于城市交通的复杂性,通常只能提前几秒到十几秒发出预警[16 -17 ] . 而高速公路具有封闭性,受外部因素干扰较少,因此在提前预警方面具有更大的潜力. ...
Leveraging existing high-occupancy vehicle lanes for mixed-autonomy traffic management with emerging connected automated vehicle applications
1
2020
... 与事件检测和交通冲突检测相比,碰撞风险的预警技术仍处于发展阶段. 目前相关研究主要围绕气象、交通流和车联网数据进行. 基于气象信息的预警研究重点关注不良天气与行车安全的关联性[10 -11 ] . 尽管这种方法较为可靠,但其难以具体针对某一局部路段的安全性进行提升. 得益于车联网技术高效的数据采集和交互能力,基于该技术的碰撞风险预警多关注于车辆间的交互关系[12 -13 ] . 然而,面对人工驾驶环境,基于交通流特性的碰撞风险预警技术更为适用. Yang等[14 ] 利用机器学习技术,构建了山区和城市区域的交通事故风险识别模型,重点考虑了流量、变道行为、速度等特征. Guo等[15 ] 基于车载AutoNavigator软件获取的数据,开发了基于危险驾驶行为和交通流量的交通事故风险预测模型,其预警准确率为84.48%. 有学者试图基于CCTV系统实施碰撞风险预警,但由于城市交通的复杂性,通常只能提前几秒到十几秒发出预警[16 -17 ] . 而高速公路具有封闭性,受外部因素干扰较少,因此在提前预警方面具有更大的潜力. ...
Rear-end collision warning of connected automated vehicles based on a novel stochastic local multivehicle optimal velocity model
1
2020
... 与事件检测和交通冲突检测相比,碰撞风险的预警技术仍处于发展阶段. 目前相关研究主要围绕气象、交通流和车联网数据进行. 基于气象信息的预警研究重点关注不良天气与行车安全的关联性[10 -11 ] . 尽管这种方法较为可靠,但其难以具体针对某一局部路段的安全性进行提升. 得益于车联网技术高效的数据采集和交互能力,基于该技术的碰撞风险预警多关注于车辆间的交互关系[12 -13 ] . 然而,面对人工驾驶环境,基于交通流特性的碰撞风险预警技术更为适用. Yang等[14 ] 利用机器学习技术,构建了山区和城市区域的交通事故风险识别模型,重点考虑了流量、变道行为、速度等特征. Guo等[15 ] 基于车载AutoNavigator软件获取的数据,开发了基于危险驾驶行为和交通流量的交通事故风险预测模型,其预警准确率为84.48%. 有学者试图基于CCTV系统实施碰撞风险预警,但由于城市交通的复杂性,通常只能提前几秒到十几秒发出预警[16 -17 ] . 而高速公路具有封闭性,受外部因素干扰较少,因此在提前预警方面具有更大的潜力. ...
Identification of dynamic traffic crash risk for cross-area freeways based on statistical and machine learning methods
1
2022
... 与事件检测和交通冲突检测相比,碰撞风险的预警技术仍处于发展阶段. 目前相关研究主要围绕气象、交通流和车联网数据进行. 基于气象信息的预警研究重点关注不良天气与行车安全的关联性[10 -11 ] . 尽管这种方法较为可靠,但其难以具体针对某一局部路段的安全性进行提升. 得益于车联网技术高效的数据采集和交互能力,基于该技术的碰撞风险预警多关注于车辆间的交互关系[12 -13 ] . 然而,面对人工驾驶环境,基于交通流特性的碰撞风险预警技术更为适用. Yang等[14 ] 利用机器学习技术,构建了山区和城市区域的交通事故风险识别模型,重点考虑了流量、变道行为、速度等特征. Guo等[15 ] 基于车载AutoNavigator软件获取的数据,开发了基于危险驾驶行为和交通流量的交通事故风险预测模型,其预警准确率为84.48%. 有学者试图基于CCTV系统实施碰撞风险预警,但由于城市交通的复杂性,通常只能提前几秒到十几秒发出预警[16 -17 ] . 而高速公路具有封闭性,受外部因素干扰较少,因此在提前预警方面具有更大的潜力. ...
A study of freeway crash risk prediction and interpretation based on risky driving behavior and traffic flow data
1
2021
... 与事件检测和交通冲突检测相比,碰撞风险的预警技术仍处于发展阶段. 目前相关研究主要围绕气象、交通流和车联网数据进行. 基于气象信息的预警研究重点关注不良天气与行车安全的关联性[10 -11 ] . 尽管这种方法较为可靠,但其难以具体针对某一局部路段的安全性进行提升. 得益于车联网技术高效的数据采集和交互能力,基于该技术的碰撞风险预警多关注于车辆间的交互关系[12 -13 ] . 然而,面对人工驾驶环境,基于交通流特性的碰撞风险预警技术更为适用. Yang等[14 ] 利用机器学习技术,构建了山区和城市区域的交通事故风险识别模型,重点考虑了流量、变道行为、速度等特征. Guo等[15 ] 基于车载AutoNavigator软件获取的数据,开发了基于危险驾驶行为和交通流量的交通事故风险预测模型,其预警准确率为84.48%. 有学者试图基于CCTV系统实施碰撞风险预警,但由于城市交通的复杂性,通常只能提前几秒到十几秒发出预警[16 -17 ] . 而高速公路具有封闭性,受外部因素干扰较少,因此在提前预警方面具有更大的潜力. ...
A novel method of predictive collision risk area estimation for proactive pedestrian accident prevention system in urban surveillance infrastructure
1
2022
... 与事件检测和交通冲突检测相比,碰撞风险的预警技术仍处于发展阶段. 目前相关研究主要围绕气象、交通流和车联网数据进行. 基于气象信息的预警研究重点关注不良天气与行车安全的关联性[10 -11 ] . 尽管这种方法较为可靠,但其难以具体针对某一局部路段的安全性进行提升. 得益于车联网技术高效的数据采集和交互能力,基于该技术的碰撞风险预警多关注于车辆间的交互关系[12 -13 ] . 然而,面对人工驾驶环境,基于交通流特性的碰撞风险预警技术更为适用. Yang等[14 ] 利用机器学习技术,构建了山区和城市区域的交通事故风险识别模型,重点考虑了流量、变道行为、速度等特征. Guo等[15 ] 基于车载AutoNavigator软件获取的数据,开发了基于危险驾驶行为和交通流量的交通事故风险预测模型,其预警准确率为84.48%. 有学者试图基于CCTV系统实施碰撞风险预警,但由于城市交通的复杂性,通常只能提前几秒到十几秒发出预警[16 -17 ] . 而高速公路具有封闭性,受外部因素干扰较少,因此在提前预警方面具有更大的潜力. ...
A Bayesian generalised extreme value model to estimate real-time pedestrian crash risks at signalised intersections using artificial intelligence-based video analytics
1
2023
... 与事件检测和交通冲突检测相比,碰撞风险的预警技术仍处于发展阶段. 目前相关研究主要围绕气象、交通流和车联网数据进行. 基于气象信息的预警研究重点关注不良天气与行车安全的关联性[10 -11 ] . 尽管这种方法较为可靠,但其难以具体针对某一局部路段的安全性进行提升. 得益于车联网技术高效的数据采集和交互能力,基于该技术的碰撞风险预警多关注于车辆间的交互关系[12 -13 ] . 然而,面对人工驾驶环境,基于交通流特性的碰撞风险预警技术更为适用. Yang等[14 ] 利用机器学习技术,构建了山区和城市区域的交通事故风险识别模型,重点考虑了流量、变道行为、速度等特征. Guo等[15 ] 基于车载AutoNavigator软件获取的数据,开发了基于危险驾驶行为和交通流量的交通事故风险预测模型,其预警准确率为84.48%. 有学者试图基于CCTV系统实施碰撞风险预警,但由于城市交通的复杂性,通常只能提前几秒到十几秒发出预警[16 -17 ] . 而高速公路具有封闭性,受外部因素干扰较少,因此在提前预警方面具有更大的潜力. ...
1
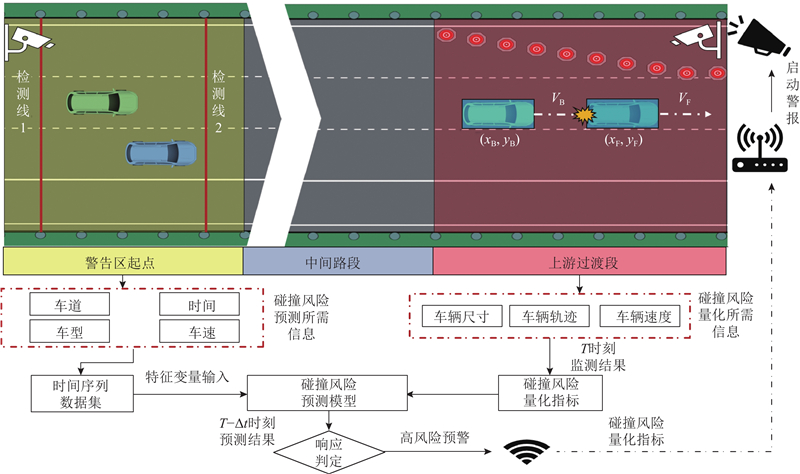
... 根据作业区碰撞风险预警的需求,提出基于作业区上游路段交通流特征的碰撞风险预警方法框架,其包含数据采集、碰撞风险量化、碰撞风险预测3个部分,如图1 所示. 在数据采集方面,依托既有CCTV系统获取道路监控视频,并采用计算机视觉技术实现交通流和车辆信息的提取. 作业区一般包括警告区、上游过渡段、缓冲区、工作区以及下游过渡段5个部分[18 ] . 其中在警告区起点开始设置预告标志,该位置后车辆会开始受到作业区的影响[19 ] . 上游过渡段的功能是实现车辆并道,该路段通常是事故的多发区域[20 ] . 因此,根据风险量化和风险预测的数据需求,确定了“警告区起点”和“上游过渡段”2个区域作为数据来源. 警告区起点监控画面采集的数据用于碰撞风险预测,上游过渡段监控画面采集的数据用于碰撞风险量化. 此外,采用交通冲突技术实现碰撞风险量化. 在此基础上,采用深度学习技术构建碰撞风险预测模型,以实现根据警告区起点路段的交通流特征预测上游过渡段的碰撞风险. ...
Evaluation of rear-end crash risk at work zone using work zone traffic data
1
2011
... 根据作业区碰撞风险预警的需求,提出基于作业区上游路段交通流特征的碰撞风险预警方法框架,其包含数据采集、碰撞风险量化、碰撞风险预测3个部分,如图1 所示. 在数据采集方面,依托既有CCTV系统获取道路监控视频,并采用计算机视觉技术实现交通流和车辆信息的提取. 作业区一般包括警告区、上游过渡段、缓冲区、工作区以及下游过渡段5个部分[18 ] . 其中在警告区起点开始设置预告标志,该位置后车辆会开始受到作业区的影响[19 ] . 上游过渡段的功能是实现车辆并道,该路段通常是事故的多发区域[20 ] . 因此,根据风险量化和风险预测的数据需求,确定了“警告区起点”和“上游过渡段”2个区域作为数据来源. 警告区起点监控画面采集的数据用于碰撞风险预测,上游过渡段监控画面采集的数据用于碰撞风险量化. 此外,采用交通冲突技术实现碰撞风险量化. 在此基础上,采用深度学习技术构建碰撞风险预测模型,以实现根据警告区起点路段的交通流特征预测上游过渡段的碰撞风险. ...
1
... 根据作业区碰撞风险预警的需求,提出基于作业区上游路段交通流特征的碰撞风险预警方法框架,其包含数据采集、碰撞风险量化、碰撞风险预测3个部分,如图1 所示. 在数据采集方面,依托既有CCTV系统获取道路监控视频,并采用计算机视觉技术实现交通流和车辆信息的提取. 作业区一般包括警告区、上游过渡段、缓冲区、工作区以及下游过渡段5个部分[18 ] . 其中在警告区起点开始设置预告标志,该位置后车辆会开始受到作业区的影响[19 ] . 上游过渡段的功能是实现车辆并道,该路段通常是事故的多发区域[20 ] . 因此,根据风险量化和风险预测的数据需求,确定了“警告区起点”和“上游过渡段”2个区域作为数据来源. 警告区起点监控画面采集的数据用于碰撞风险预测,上游过渡段监控画面采集的数据用于碰撞风险量化. 此外,采用交通冲突技术实现碰撞风险量化. 在此基础上,采用深度学习技术构建碰撞风险预测模型,以实现根据警告区起点路段的交通流特征预测上游过渡段的碰撞风险. ...
A survey of moving object detection methods: a practical perspective
1
2022
... 车辆目标检测方法主要如下:基于传统计算机视觉的方法(如背景差分法和光流法);基于卷积神经网络的方法(YOLO、Single Shot MultiBox Detector和RetinaNet等);基于递归神经网络的方法;基于实例分割的方法;基于半监督学习的方法(如生成式对抗网络)[21 ] . 其中应用最广泛的方法为区域卷积神经网络(region-based convolutional neural networks, RCNN)和YOLO系列算法. RCNN算法属于“两阶段”目标检测算法,包括候选区域检测和分类细化2个阶段,其检测精度高,但检测速度较慢[22 ] . YOLO算法使用单个神经网络,在单个前向传递中预测每个对象的边界框和类别概率,其检测精度稍低于RCNN,但是具有其检测速度快和部署便捷的优势[23 ] . ...
1
... 车辆目标检测方法主要如下:基于传统计算机视觉的方法(如背景差分法和光流法);基于卷积神经网络的方法(YOLO、Single Shot MultiBox Detector和RetinaNet等);基于递归神经网络的方法;基于实例分割的方法;基于半监督学习的方法(如生成式对抗网络)[21 ] . 其中应用最广泛的方法为区域卷积神经网络(region-based convolutional neural networks, RCNN)和YOLO系列算法. RCNN算法属于“两阶段”目标检测算法,包括候选区域检测和分类细化2个阶段,其检测精度高,但检测速度较慢[22 ] . YOLO算法使用单个神经网络,在单个前向传递中预测每个对象的边界框和类别概率,其检测精度稍低于RCNN,但是具有其检测速度快和部署便捷的优势[23 ] . ...
1
... 车辆目标检测方法主要如下:基于传统计算机视觉的方法(如背景差分法和光流法);基于卷积神经网络的方法(YOLO、Single Shot MultiBox Detector和RetinaNet等);基于递归神经网络的方法;基于实例分割的方法;基于半监督学习的方法(如生成式对抗网络)[21 ] . 其中应用最广泛的方法为区域卷积神经网络(region-based convolutional neural networks, RCNN)和YOLO系列算法. RCNN算法属于“两阶段”目标检测算法,包括候选区域检测和分类细化2个阶段,其检测精度高,但检测速度较慢[22 ] . YOLO算法使用单个神经网络,在单个前向传递中预测每个对象的边界框和类别概率,其检测精度稍低于RCNN,但是具有其检测速度快和部署便捷的优势[23 ] . ...
1
... 此外,为了实现车辆轨迹的连续跟踪,须在目标检测的基础上结合多目标跟踪算法. 相较基于卷积神经网络构建的DeepSORT算法,StrongSORT基于Siamese网络构建结合卡尔曼滤波对目标位置进行预测[24 ] . StrongSORT算法计算复杂度更低,具有更高的跟踪效率. 考虑风险预警的时效性要求,选择基于YOLOv5开发道路监控视角下的车辆目标检测模型,进一步结合StrongSORT实现多目标跟踪. ...
Dynamic calibration of pan-tilt-zoom cameras for traffic monitoring
1
2006
... 要利用道路监控采集有效的车辆运动信息,须实现相机坐标系与世界坐标系的准确转换. 根据相机所在的空间位置和焦距,可以推导出图像坐标系与世界坐标系的映射关系[25 ] : ...
Monocular visual traffic surveillance: a review
1
2022
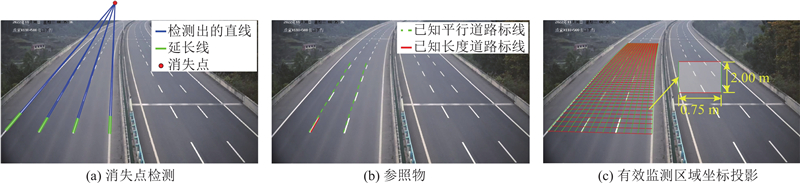
... 面对相机外部参数的标定问题,学者提出了多种方法. 根据使用参数(V表示消失点,L表示长度参照物,H表示相机高度,W表示宽度参照物),可以分为多消失点(VVL、VVH、VVW、VVD等)以及单消失点(VLH、VWH、VWL等)[26 ] . 高速公路缺少有效参照,往往仅能根据道路标线确定一个消失点,并且监控相机高度往往不可知. 中国高速公路标线长度及车道宽度符合《道路交通标志和标线 第3部分: 道路交通标线》(GB 5768.3—2009)[27 ] 和《公路工程技术标准》(JTGB01—2014)[28 ] ,即道路标线为相机标定提供了可靠的横向距离和纵向距离参照. 因此,结合Kanhere等[29 ] 和Wang等[30 ] 的研究成果,采用“VWL”(一个消失点,已知参照物宽度和长度)相机标定方法,如图2 所示. 根据道路标线确定一个消失点,如图2 (a)所示;选定一组平行的道路标线作为宽度标定参照物,以及一条已知长度的道路标线作为长度标定参照物,如图2 (b)所示;考虑车辆运动信息的监测精度,根据单位像素的真实距离,选定有效监测区域,其坐标投影如图2 (c)所示. 具体相机参数计算方法如下: ...
1
... 面对相机外部参数的标定问题,学者提出了多种方法. 根据使用参数(V表示消失点,L表示长度参照物,H表示相机高度,W表示宽度参照物),可以分为多消失点(VVL、VVH、VVW、VVD等)以及单消失点(VLH、VWH、VWL等)[26 ] . 高速公路缺少有效参照,往往仅能根据道路标线确定一个消失点,并且监控相机高度往往不可知. 中国高速公路标线长度及车道宽度符合《道路交通标志和标线 第3部分: 道路交通标线》(GB 5768.3—2009)[27 ] 和《公路工程技术标准》(JTGB01—2014)[28 ] ,即道路标线为相机标定提供了可靠的横向距离和纵向距离参照. 因此,结合Kanhere等[29 ] 和Wang等[30 ] 的研究成果,采用“VWL”(一个消失点,已知参照物宽度和长度)相机标定方法,如图2 所示. 根据道路标线确定一个消失点,如图2 (a)所示;选定一组平行的道路标线作为宽度标定参照物,以及一条已知长度的道路标线作为长度标定参照物,如图2 (b)所示;考虑车辆运动信息的监测精度,根据单位像素的真实距离,选定有效监测区域,其坐标投影如图2 (c)所示. 具体相机参数计算方法如下: ...
1
... 面对相机外部参数的标定问题,学者提出了多种方法. 根据使用参数(V表示消失点,L表示长度参照物,H表示相机高度,W表示宽度参照物),可以分为多消失点(VVL、VVH、VVW、VVD等)以及单消失点(VLH、VWH、VWL等)[26 ] . 高速公路缺少有效参照,往往仅能根据道路标线确定一个消失点,并且监控相机高度往往不可知. 中国高速公路标线长度及车道宽度符合《道路交通标志和标线 第3部分: 道路交通标线》(GB 5768.3—2009)[27 ] 和《公路工程技术标准》(JTGB01—2014)[28 ] ,即道路标线为相机标定提供了可靠的横向距离和纵向距离参照. 因此,结合Kanhere等[29 ] 和Wang等[30 ] 的研究成果,采用“VWL”(一个消失点,已知参照物宽度和长度)相机标定方法,如图2 所示. 根据道路标线确定一个消失点,如图2 (a)所示;选定一组平行的道路标线作为宽度标定参照物,以及一条已知长度的道路标线作为长度标定参照物,如图2 (b)所示;考虑车辆运动信息的监测精度,根据单位像素的真实距离,选定有效监测区域,其坐标投影如图2 (c)所示. 具体相机参数计算方法如下: ...
A taxonomy and analysis of camera calibration methods for traffic monitoring applications
1
2010
... 面对相机外部参数的标定问题,学者提出了多种方法. 根据使用参数(V表示消失点,L表示长度参照物,H表示相机高度,W表示宽度参照物),可以分为多消失点(VVL、VVH、VVW、VVD等)以及单消失点(VLH、VWH、VWL等)[26 ] . 高速公路缺少有效参照,往往仅能根据道路标线确定一个消失点,并且监控相机高度往往不可知. 中国高速公路标线长度及车道宽度符合《道路交通标志和标线 第3部分: 道路交通标线》(GB 5768.3—2009)[27 ] 和《公路工程技术标准》(JTGB01—2014)[28 ] ,即道路标线为相机标定提供了可靠的横向距离和纵向距离参照. 因此,结合Kanhere等[29 ] 和Wang等[30 ] 的研究成果,采用“VWL”(一个消失点,已知参照物宽度和长度)相机标定方法,如图2 所示. 根据道路标线确定一个消失点,如图2 (a)所示;选定一组平行的道路标线作为宽度标定参照物,以及一条已知长度的道路标线作为长度标定参照物,如图2 (b)所示;考虑车辆运动信息的监测精度,根据单位像素的真实距离,选定有效监测区域,其坐标投影如图2 (c)所示. 具体相机参数计算方法如下: ...
1
... 面对相机外部参数的标定问题,学者提出了多种方法. 根据使用参数(V表示消失点,L表示长度参照物,H表示相机高度,W表示宽度参照物),可以分为多消失点(VVL、VVH、VVW、VVD等)以及单消失点(VLH、VWH、VWL等)[26 ] . 高速公路缺少有效参照,往往仅能根据道路标线确定一个消失点,并且监控相机高度往往不可知. 中国高速公路标线长度及车道宽度符合《道路交通标志和标线 第3部分: 道路交通标线》(GB 5768.3—2009)[27 ] 和《公路工程技术标准》(JTGB01—2014)[28 ] ,即道路标线为相机标定提供了可靠的横向距离和纵向距离参照. 因此,结合Kanhere等[29 ] 和Wang等[30 ] 的研究成果,采用“VWL”(一个消失点,已知参照物宽度和长度)相机标定方法,如图2 所示. 根据道路标线确定一个消失点,如图2 (a)所示;选定一组平行的道路标线作为宽度标定参照物,以及一条已知长度的道路标线作为长度标定参照物,如图2 (b)所示;考虑车辆运动信息的监测精度,根据单位像素的真实距离,选定有效监测区域,其坐标投影如图2 (c)所示. 具体相机参数计算方法如下: ...
A survey on deep learning based methods and datasets for monocular 3D object detection
1
2021
... 车辆的长度和宽度直接影响碰撞风险评估的准确性,以往研究中常采用雷达设备获取点云数据以获取车辆3D尺寸. 为了充分发挥道路监控的价值潜力,大量学者尝试从单目相机中提取车辆3D形态信息[31 -33 ] . 在Dubská等[34 ] 研究基础上,结合背景减除构建自动拟合车辆3D形态的程序,如图3 所示. 首先,在YOLOv5车辆检测的基础上,根据目标检测框分隔背景图像与当前帧图像,减少计算量及干扰物. 其次利用高斯混合背景减除算法,识别车辆外部轮廓. 随后,根据车辆外部轮廓信息,利用多边形拟合方法,检测3D形态拟合的轮廓关键点. 最后,根据相机标定获取的消失点和坐标转换矩阵,提取车辆长度和宽度信息,并以车辆离开上游过渡段的有效监测区前30 帧的3D形态信息均值作为最终取值. ...
高速公路相机自动标定及道路坐标系构建
0
2022
高速公路相机自动标定及道路坐标系构建
0
2022
基于CenterNet的路侧单目视角车辆3D形态精确感知
1
2022
... 车辆的长度和宽度直接影响碰撞风险评估的准确性,以往研究中常采用雷达设备获取点云数据以获取车辆3D尺寸. 为了充分发挥道路监控的价值潜力,大量学者尝试从单目相机中提取车辆3D形态信息[31 -33 ] . 在Dubská等[34 ] 研究基础上,结合背景减除构建自动拟合车辆3D形态的程序,如图3 所示. 首先,在YOLOv5车辆检测的基础上,根据目标检测框分隔背景图像与当前帧图像,减少计算量及干扰物. 其次利用高斯混合背景减除算法,识别车辆外部轮廓. 随后,根据车辆外部轮廓信息,利用多边形拟合方法,检测3D形态拟合的轮廓关键点. 最后,根据相机标定获取的消失点和坐标转换矩阵,提取车辆长度和宽度信息,并以车辆离开上游过渡段的有效监测区前30 帧的3D形态信息均值作为最终取值. ...
基于CenterNet的路侧单目视角车辆3D形态精确感知
1
2022
... 车辆的长度和宽度直接影响碰撞风险评估的准确性,以往研究中常采用雷达设备获取点云数据以获取车辆3D尺寸. 为了充分发挥道路监控的价值潜力,大量学者尝试从单目相机中提取车辆3D形态信息[31 -33 ] . 在Dubská等[34 ] 研究基础上,结合背景减除构建自动拟合车辆3D形态的程序,如图3 所示. 首先,在YOLOv5车辆检测的基础上,根据目标检测框分隔背景图像与当前帧图像,减少计算量及干扰物. 其次利用高斯混合背景减除算法,识别车辆外部轮廓. 随后,根据车辆外部轮廓信息,利用多边形拟合方法,检测3D形态拟合的轮廓关键点. 最后,根据相机标定获取的消失点和坐标转换矩阵,提取车辆长度和宽度信息,并以车辆离开上游过渡段的有效监测区前30 帧的3D形态信息均值作为最终取值. ...
1
... 车辆的长度和宽度直接影响碰撞风险评估的准确性,以往研究中常采用雷达设备获取点云数据以获取车辆3D尺寸. 为了充分发挥道路监控的价值潜力,大量学者尝试从单目相机中提取车辆3D形态信息[31 -33 ] . 在Dubská等[34 ] 研究基础上,结合背景减除构建自动拟合车辆3D形态的程序,如图3 所示. 首先,在YOLOv5车辆检测的基础上,根据目标检测框分隔背景图像与当前帧图像,减少计算量及干扰物. 其次利用高斯混合背景减除算法,识别车辆外部轮廓. 随后,根据车辆外部轮廓信息,利用多边形拟合方法,检测3D形态拟合的轮廓关键点. 最后,根据相机标定获取的消失点和坐标转换矩阵,提取车辆长度和宽度信息,并以车辆离开上游过渡段的有效监测区前30 帧的3D形态信息均值作为最终取值. ...
Application of proximal surrogate indicators for safety evaluation: a review of recent developments and research needs
1
2017
... 冲突替代指标被作为主要的微观碰撞风险量化指标,其通过车辆与障碍物时间和空间接近度评估车辆发生碰撞的可能性,并将接近度超过一定阈值的事件定义为交通冲突[35 ] . 冲突替代指标分为基于减速度的冲突指标和基于时间接近度的冲突指标. ...
Key risk indicators for accident assessment conditioned on pre-crash vehicle trajectory
1
2018
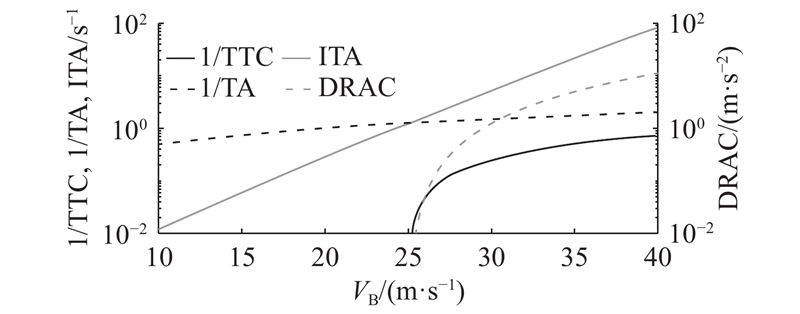
... 在基于减速度的冲突指标中,避免碰撞减速率(deceleration rate to avoid collision, DRAC)是最主要的代表之一. 假设前车速度不变而后车需要按照一定的减速度制动,避免与前车发生碰撞所需的最小减速度,即为DRAC[36 ] . 基于时间接近度的冲突替代指标,综合考虑车辆速度和空间距离,能够更加准确地评估行车风险. 其中具有代表性的指标包括碰撞时间(time to collision, TTC)和事故时间(time to accident, TA). TTC被定义为2个车辆在维持当前速度和方向的情况下,相撞前的剩余时间[37 ] . 然而,TTC和DRAC仅适用于后车速度大于前车速度的情境. 这一限制意味着TTC和DRAC在评估紧急制动情况下的碰撞风险时具有局限性. 为此部分学者[38 ] 提出TA作为评估指标,其定义为后方车辆到达前方车辆所在位置所需的时间. TA与TTC的差距在于TA假设后车速度不变,而前车紧急制动. TA虽然避免了TTC使用的前提条件(后车速度大于前车速度),但是却忽略了车辆相对速差,使得其在风险评估过程中敏感度过高. 因此,在实际应用中TA往往仅被作为TTC指标阈值划分的参考指标[39 ] . ...
Microsimulation approach for predicting crashes at unsignalized intersections using traffic conflicts
1
2012
... 在基于减速度的冲突指标中,避免碰撞减速率(deceleration rate to avoid collision, DRAC)是最主要的代表之一. 假设前车速度不变而后车需要按照一定的减速度制动,避免与前车发生碰撞所需的最小减速度,即为DRAC[36 ] . 基于时间接近度的冲突替代指标,综合考虑车辆速度和空间距离,能够更加准确地评估行车风险. 其中具有代表性的指标包括碰撞时间(time to collision, TTC)和事故时间(time to accident, TA). TTC被定义为2个车辆在维持当前速度和方向的情况下,相撞前的剩余时间[37 ] . 然而,TTC和DRAC仅适用于后车速度大于前车速度的情境. 这一限制意味着TTC和DRAC在评估紧急制动情况下的碰撞风险时具有局限性. 为此部分学者[38 ] 提出TA作为评估指标,其定义为后方车辆到达前方车辆所在位置所需的时间. TA与TTC的差距在于TA假设后车速度不变,而前车紧急制动. TA虽然避免了TTC使用的前提条件(后车速度大于前车速度),但是却忽略了车辆相对速差,使得其在风险评估过程中敏感度过高. 因此,在实际应用中TA往往仅被作为TTC指标阈值划分的参考指标[39 ] . ...
A crash prediction method based on bivariate extreme value theory and video-based vehicle trajectory data
1
2019
... 在基于减速度的冲突指标中,避免碰撞减速率(deceleration rate to avoid collision, DRAC)是最主要的代表之一. 假设前车速度不变而后车需要按照一定的减速度制动,避免与前车发生碰撞所需的最小减速度,即为DRAC[36 ] . 基于时间接近度的冲突替代指标,综合考虑车辆速度和空间距离,能够更加准确地评估行车风险. 其中具有代表性的指标包括碰撞时间(time to collision, TTC)和事故时间(time to accident, TA). TTC被定义为2个车辆在维持当前速度和方向的情况下,相撞前的剩余时间[37 ] . 然而,TTC和DRAC仅适用于后车速度大于前车速度的情境. 这一限制意味着TTC和DRAC在评估紧急制动情况下的碰撞风险时具有局限性. 为此部分学者[38 ] 提出TA作为评估指标,其定义为后方车辆到达前方车辆所在位置所需的时间. TA与TTC的差距在于TA假设后车速度不变,而前车紧急制动. TA虽然避免了TTC使用的前提条件(后车速度大于前车速度),但是却忽略了车辆相对速差,使得其在风险评估过程中敏感度过高. 因此,在实际应用中TA往往仅被作为TTC指标阈值划分的参考指标[39 ] . ...
Traffic conflict techniques for road safety analysis: open questions and some insights
1
2014
... 在基于减速度的冲突指标中,避免碰撞减速率(deceleration rate to avoid collision, DRAC)是最主要的代表之一. 假设前车速度不变而后车需要按照一定的减速度制动,避免与前车发生碰撞所需的最小减速度,即为DRAC[36 ] . 基于时间接近度的冲突替代指标,综合考虑车辆速度和空间距离,能够更加准确地评估行车风险. 其中具有代表性的指标包括碰撞时间(time to collision, TTC)和事故时间(time to accident, TA). TTC被定义为2个车辆在维持当前速度和方向的情况下,相撞前的剩余时间[37 ] . 然而,TTC和DRAC仅适用于后车速度大于前车速度的情境. 这一限制意味着TTC和DRAC在评估紧急制动情况下的碰撞风险时具有局限性. 为此部分学者[38 ] 提出TA作为评估指标,其定义为后方车辆到达前方车辆所在位置所需的时间. TA与TTC的差距在于TA假设后车速度不变,而前车紧急制动. TA虽然避免了TTC使用的前提条件(后车速度大于前车速度),但是却忽略了车辆相对速差,使得其在风险评估过程中敏感度过高. 因此,在实际应用中TA往往仅被作为TTC指标阈值划分的参考指标[39 ] . ...
1
... 以ITA表征碰撞风险,其值越大表示碰撞可能性越高. 当后车速度大于前车时$ \mathrm{e}\mathrm{x}\mathrm{p}\;\left[\lambda \left({V}_{\mathrm{B}}\left(t\right)-{V}_{\mathrm{F}}\left(t\right)\right)\right] > 1 $ $ \mathrm{e}\mathrm{x}\mathrm{p}\;\left[\lambda \left({V}_{\mathrm{B}}\left(t\right)-{V}_{\mathrm{F}}\left(t\right)\right)\right] < 1 $ [40 ] 总结的速差与碰撞率之间的关系,本研究取λ =0.25,即当后车与前车速差为2.78 m/s(约10 km/h)时,ITA为1/TA的2 倍,当速差为−2.78 m/s时,ITA为1/TA的0.5 倍. ...
A high-resolution trajectory data driven method for real-time evaluation of traffic safety
1
2022
... 根据Hu等[41 ] 的研究结果,以30 s为时间间隔统计交通流特征,所开发的碰撞风险预测模型准确率更高. 因此,数据集按照时间序列构建,每30 s为一个单元. 各单元统计信息包括特征变量和预测风险值,其中预测风险为30 s单元内最大的碰撞风险量化值,即ITA的最大值. ...
Time series modeling in traffic safety research
1
2018
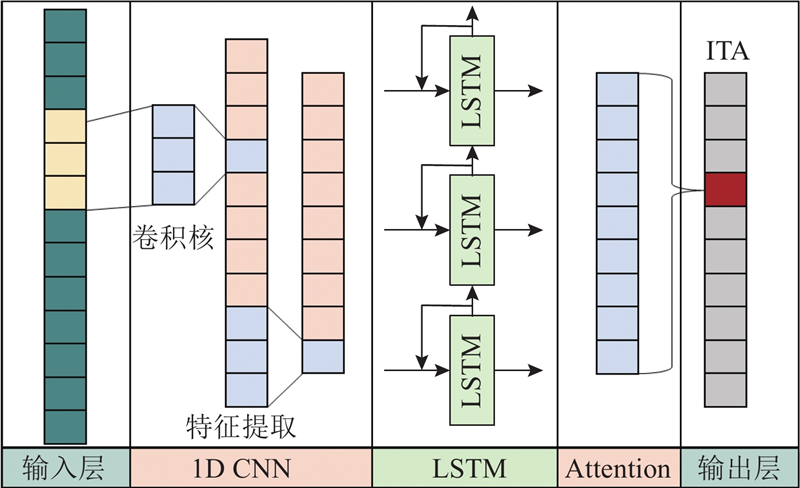
... 时间序列预测在交通领域中的应用主要集中于交通量预测. 相较短时交通量预测,交通安全领域的时间序列预测研究相对较少,且多采用移动平均模型MA、自回归模型AR、差分自回归移动平均模型ARIMA等传统统计方法[42 ] . 根据相关文献研究,MA、AR、ARIMA等传统方法在交通量预测研究中已逐步被深度学习方法替代[43 ] . 1D CNN和LSTM这2个深度学习模型为目前在各领域应用较多的深度学习模型. 其中,1D CNN在图像和信号处理方面展现出明显的优势,其能够通过卷积运算从局部特征中提取更高级别的特征;LSTM通过门控机制来控制信息的流动,能够处理长期依赖关系. 在实际应用中发现LSTM在处理高维数据时容易过拟合,因此引入注意力机制以解决该问题[44 ] . ...
Road traffic forecasting: Recent advances and new challenges
1
2018
... 时间序列预测在交通领域中的应用主要集中于交通量预测. 相较短时交通量预测,交通安全领域的时间序列预测研究相对较少,且多采用移动平均模型MA、自回归模型AR、差分自回归移动平均模型ARIMA等传统统计方法[42 ] . 根据相关文献研究,MA、AR、ARIMA等传统方法在交通量预测研究中已逐步被深度学习方法替代[43 ] . 1D CNN和LSTM这2个深度学习模型为目前在各领域应用较多的深度学习模型. 其中,1D CNN在图像和信号处理方面展现出明显的优势,其能够通过卷积运算从局部特征中提取更高级别的特征;LSTM通过门控机制来控制信息的流动,能够处理长期依赖关系. 在实际应用中发现LSTM在处理高维数据时容易过拟合,因此引入注意力机制以解决该问题[44 ] . ...
A hybrid deep learning model with 1DCNN-LSTM-Attention networks for short-term traffic flow prediction
1
2021
... 时间序列预测在交通领域中的应用主要集中于交通量预测. 相较短时交通量预测,交通安全领域的时间序列预测研究相对较少,且多采用移动平均模型MA、自回归模型AR、差分自回归移动平均模型ARIMA等传统统计方法[42 ] . 根据相关文献研究,MA、AR、ARIMA等传统方法在交通量预测研究中已逐步被深度学习方法替代[43 ] . 1D CNN和LSTM这2个深度学习模型为目前在各领域应用较多的深度学习模型. 其中,1D CNN在图像和信号处理方面展现出明显的优势,其能够通过卷积运算从局部特征中提取更高级别的特征;LSTM通过门控机制来控制信息的流动,能够处理长期依赖关系. 在实际应用中发现LSTM在处理高维数据时容易过拟合,因此引入注意力机制以解决该问题[44 ] . ...
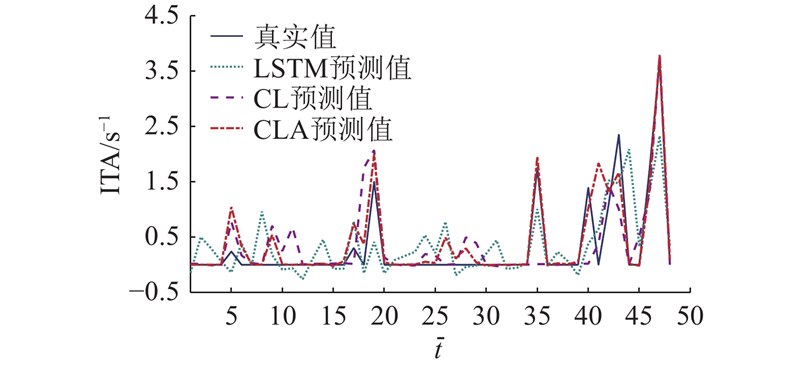
1
... 为了验证不同模型的预测性能,选取深度学习常用的2个评价指标:均方根误差(root mean square error, RMSE)和拟合优度确定系数R 2 [45 ] . RMSE表示模型的预测值与真实值之间的差距,值越小表示模型预测的准确性越高;R 2 表示模型的预测值与真实值之间的相关程度,取值范围为0~1.0,值越大表示模型预测的准确性越高. ...
1
... 采用单位时间内碰撞风险量化指标的最大值表征上游过渡段碰撞风险. 在数据提取及处理过程中,除了上述存在的异常数据外,速度数据提取及处理过程也会引入一定的噪声. 异常数据和噪声都会对碰撞风险量化的可靠性造成影响. 因此,在量化碰撞风险之前,根据监控视频对异常值进行清洗,同时采用Savitzky-Golay 滤波算法对速度数据进行滤波处理[46 ] . ...
Comparison of threshold determination methods for the deceleration rate to avoid a crash (DRAC)-based crash estimation
1
2021
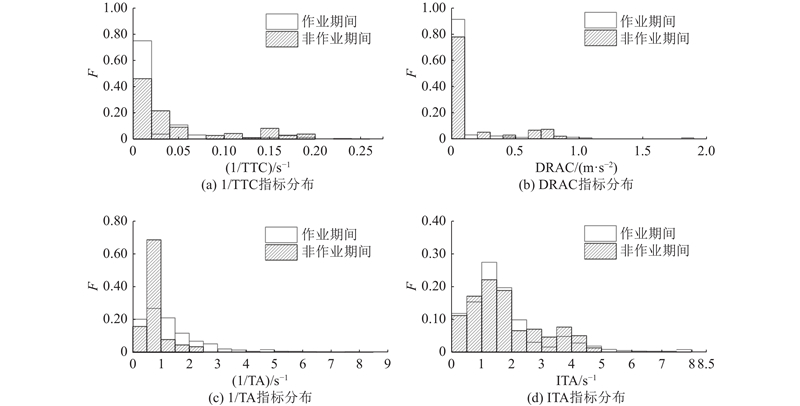
... 进一步,依托实例中收集的数据,对4种冲突指标的差异进行对比分析. 如图8 所示为作业期间和非作业期间4种冲突指标的统计分布. 图中,F 为相关指标的频率. 可以发现以下几点趋势:1)TTC、TA、ITA和DRAC这4个指标的均值和极大值,总体上在作业期间的均高于非作业期间的,这意味着养护作业对路段的交通安全产生了负面效果. 2)DRAC的阈值为−3.4 m/s2 [47 ] ,TTC的阈值为3 s(即1/TTC的阈值为0.33 s−1 )[48 ] . 研究样本的TTC和DRAC均小于阈值,说明它们对碰撞风险敏感较低,在风险监测时难以表征风险态势,仅适于作为较长时间范围内总体风险的量化指标. 3)TA风险阈值为1.5 s(即1/TTC的阈值为0.66 s−1 )[49 ] . 可见,TA敏感度过高极易发生误判. 4)ITA相比TTC和DRAC有更高的区分度,结合前述假设场景中的分析可知ITA增强了对相对速度的敏感性. 同时,它避免了TA的误判问题. 结合上述分析,故本研究选择ITA作为碰撞风险的量化指标. ...
Simulation of traffic conflicts at unsignalized intersections with TSC-Sim
1
1994
... 进一步,依托实例中收集的数据,对4种冲突指标的差异进行对比分析. 如图8 所示为作业期间和非作业期间4种冲突指标的统计分布. 图中,F 为相关指标的频率. 可以发现以下几点趋势:1)TTC、TA、ITA和DRAC这4个指标的均值和极大值,总体上在作业期间的均高于非作业期间的,这意味着养护作业对路段的交通安全产生了负面效果. 2)DRAC的阈值为−3.4 m/s2 [47 ] ,TTC的阈值为3 s(即1/TTC的阈值为0.33 s−1 )[48 ] . 研究样本的TTC和DRAC均小于阈值,说明它们对碰撞风险敏感较低,在风险监测时难以表征风险态势,仅适于作为较长时间范围内总体风险的量化指标. 3)TA风险阈值为1.5 s(即1/TTC的阈值为0.66 s−1 )[49 ] . 可见,TA敏感度过高极易发生误判. 4)ITA相比TTC和DRAC有更高的区分度,结合前述假设场景中的分析可知ITA增强了对相对速度的敏感性. 同时,它避免了TA的误判问题. 结合上述分析,故本研究选择ITA作为碰撞风险的量化指标. ...
1
... 进一步,依托实例中收集的数据,对4种冲突指标的差异进行对比分析. 如图8 所示为作业期间和非作业期间4种冲突指标的统计分布. 图中,F 为相关指标的频率. 可以发现以下几点趋势:1)TTC、TA、ITA和DRAC这4个指标的均值和极大值,总体上在作业期间的均高于非作业期间的,这意味着养护作业对路段的交通安全产生了负面效果. 2)DRAC的阈值为−3.4 m/s2 [47 ] ,TTC的阈值为3 s(即1/TTC的阈值为0.33 s−1 )[48 ] . 研究样本的TTC和DRAC均小于阈值,说明它们对碰撞风险敏感较低,在风险监测时难以表征风险态势,仅适于作为较长时间范围内总体风险的量化指标. 3)TA风险阈值为1.5 s(即1/TTC的阈值为0.66 s−1 )[49 ] . 可见,TA敏感度过高极易发生误判. 4)ITA相比TTC和DRAC有更高的区分度,结合前述假设场景中的分析可知ITA增强了对相对速度的敏感性. 同时,它避免了TA的误判问题. 结合上述分析,故本研究选择ITA作为碰撞风险的量化指标. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}