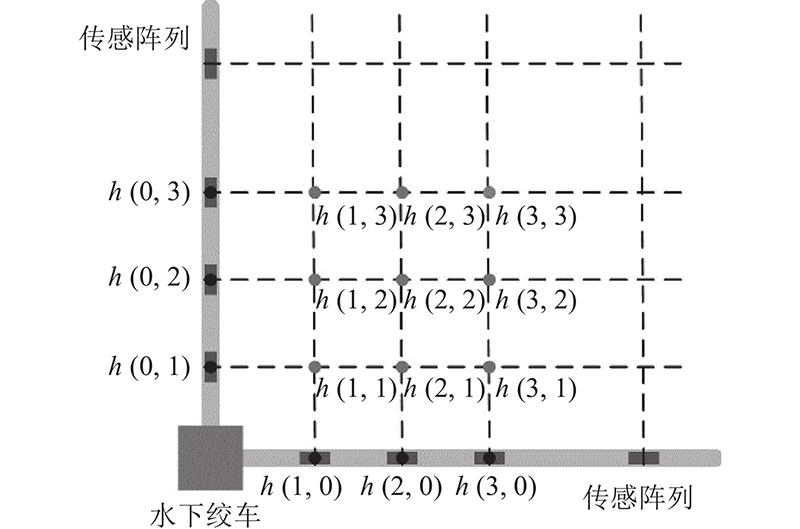
(7) $ \left. {\left. {\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {h\left( {i,j} \right) = 0.5\left( {h\left( {i - 1,j} \right)+h\left( {i,j - 1} \right)} \right)};\\ {h\left( {0,0} \right) = 0{\text{, }}} {1 \leqslant i \leqslant 25{\text{, }}} {1 \leqslant j \leqslant 25{\text{.}}} \end{array}} \end{array}} \right\}} \right. $
[1]
RUPPEL C D, WAITE W F Grand challenge: timescales and processes of methane hydrate formation and breakdown, with application to geologic systems
[J]. Journal of Geophysical Research: Solid Earth , 2020 , 125 (8 ): e2018JB016459
[本文引用: 1]
[2]
YOU K, FLEMINGS P B, MALINVERNO A, et al Mechanisms of methane hydrate formation in geological systems
[J]. Reviews of Geophysics , 2019 , 57 (4 ): 1146 - 1196
DOI:10.1029/2018RG000638
[本文引用: 1]
[3]
CHONG Z, YANG S, BABU P, et al Review of natural gas hydrates as an energy resource: prospects and challenges
[J]. Applied Energy , 2016 , 162 : 1633 - 1652
DOI:10.1016/j.apenergy.2014.12.061
[本文引用: 1]
[4]
XU C, CHEN J, ZHU H, et al Experimental research on seafloor mapping and vertical deformation monitoring for gas hydrate zone using nine-axis MEMS sensor tapes
[J]. IEEE Journal of Oceanic Engineering , 2018 , 44 (4 ): 1090 - 1101
[本文引用: 3]
[5]
朱超祁, 张民生, 刘晓磊, 等 海底天然气水合物开采导致的地质灾害及其监测技术
[J]. 灾害学 , 2017 , 32 (3 ): 51 - 56
DOI:10.3969/j.issn.1000-811X.2017.03.010
[本文引用: 1]
ZHU Chao-qi, ZHANG Min-sheng, LIU Xiao-lei, et al Gas hydrates: production, geohazards and monitoring
[J]. Journal of Catastrophology , 2017 , 32 (3 ): 51 - 56
DOI:10.3969/j.issn.1000-811X.2017.03.010
[本文引用: 1]
[6]
XU C, CHEN J, YAN D, et al Review of underwater cable shape detection
[J]. Journal of Atmospheric and Oceanic Technology 2016 , 33 (3 ): 597 - 606
DOI:10.1175/JTECH-D-15-0112.1
[本文引用: 1]
[7]
李岳明, 李晔, 盛明伟, 等 AUV 搭载多波束声纳进行地形测量的现状及展望
[J]. 海洋测绘 , 2016 , 36 (4 ): 7 - 11
DOI:10.3969/j.issn.1671-3044.2016.04.002
[本文引用: 1]
LI Yue-ming, LI Ye, SHENG Ming-wei, et al Application and development of topographic survey using multibeam echosounder equipped on AUV
[J]. Hydrographic Surveying and Charting 2016 , 36 (4 ): 7 - 11
DOI:10.3969/j.issn.1671-3044.2016.04.002
[本文引用: 1]
[8]
YOKOYAMA T, SHIMOYAMA M, MATSUDA S, et al. Monitoring system of seafloor subsidence for methane hydrate production test [C]// SPWLA 18th Formation Evaluation Symposium of Japan. Chiba: [s. n.], 2012, 23(3): 425–434.
[本文引用: 2]
[9]
SAITO H, YOKOYAMA T. Development of seafloor displacement monitoring system using a 3-component servo-accelerometer [C]// OCEANS 2008 – MTS/IEEE Kobe Techno-Ocean . Kobe: IEEE, 2008: 1-4.
[本文引用: 1]
[10]
辛明真. 基于GNSS-A浮标的水下非差定位关键技术研究[D]. 青岛: 山东科技大学, 2016.
[本文引用: 1]
Xin Ming-zhen. The research on key technologies of non-differential method based on GNSS-A buoys underwater positioning system [D]. Qingdao: Shandong University of Science and Technology, 2016.
[本文引用: 1]
[11]
杨元喜, 刘焱雄, 孙大军, 等. 2020. 海底大地基准网建设及其关键技术[J]. 中国科学: 地球科学, 50(7): 936-945.
YANG Yuan-xi, LIU Yan-xiong, SUN Da-jun, et al. Seafloor geodetic network establishment and key technologies [J]. SCIENTIA SINICA Terrae , 2020, 50(7): 936-945.
[12]
刘经南, 陈冠旭, 赵建虎, 等 海洋时空基准网的进展与趋势
[J]. 武汉大学学报:信息科学版 , 2019 , 44 (1 ): 20 - 40
[本文引用: 1]
LIU Jing-nan, CHEN Guan-xu, ZHAO Jian-hu, et al Development and trends of marine space-time frame network
[J]. Geomatics and Information Science of Wuhan University , 2019 , 44 (1 ): 20 - 40
[本文引用: 1]
[13]
YOKOTA Y, ISHIKAWA T Shallow slow slip events along the nankai trough detected by GNSS-A
[J]. Science Advances , 2020 , 6 (3 ): eaay5786
DOI:10.1126/sciadv.aay5786
[本文引用: 1]
[14]
YOKOTA Y, ISHIKAWA T, WATANABE S I Seafloor crustal deformation data along the subduction zones around Japan obtained by GNSS-A observations
[J]. Scientific Data , 2018 , 5 (4 ): 2303 - 2322
[15]
MISHORY J DARPA Eyes proposers’s day for undersea positioning system
[J]. Inside the Pentagon , 2015 , 31 (15 ): 11
[本文引用: 1]
[16]
ZHANG K, LI Y, ZHAO J, et al Underwater navigation based on real-time simultaneous sound speed profile correction
[J]. Marine Geodesy , 2016 , 39 (1 ): 98 - 111
DOI:10.1080/01490419.2015.1082521
[本文引用: 1]
[17]
SCHERWATH M, THOMSEN L, RIEDEL M, et al Ocean observatories as a tool to advance gas hydrate research
[J]. Earth and Space Science , 2019 , 6 (12 ): 2644 - 2652
DOI:10.1029/2019EA000762
[本文引用: 1]
[18]
XU C, CHEN J, GE Y, et al Monitoring the vertical changes of a tidal flat using a MEMS accelerometer array
[J]. Applied Ocean Research , 2020 , 101 (1 ): 102186
[本文引用: 1]
[19]
GE Y, CHEN J, CAO C, et al. Development and sea trial of the terrain monitoring device based on mems sensing array [C]// IOP Conference Series Earth and Environmental Science. Beijing: [s.n.], 2021, 861: 072008.
[本文引用: 1]
[20]
BENNETTP V, ABDOUN T, BARENDSE M Evaluation of soft clay field consolidation using mems-based in-place inclinometer-accelerometer array
[J]. Geotechnical Testing Journal , 2015 , 38 (3 ): 290 - 302
[本文引用: 1]
[21]
ZHU C, JIA Y, WANG Z, et al Dynamics of bottom boundary layers in the yellow river subaqueous delta based on long-term in-situ observations
[J]. Acta Geologica Sinica , 2017 , 91 (1 ): 369 - 370
DOI:10.1111/1755-6724.13095
[本文引用: 1]
[22]
PRIOR D B, SUHAYDA J N, LU N, et al Storm wave reactivation of a submarine landslide
[J]. Nature , 1989 , 341 (6237 ): 47
DOI:10.1038/341047a0
[本文引用: 1]
[23]
UCHIMURA T, TOWHATA I, WANG L, et al Precaution and early warning of surface failure of slopes using tilt sensors
[J]. Soils and Foundations , 2015 , 55 (5 ): 1086 - 1099
DOI:10.1016/j.sandf.2015.09.010
[本文引用: 1]
[24]
CHEN J, CAO C, GE Y, et al Experimental research on data synchronous acquisition method of subsidence monitoring in submarine gas hydrate mining area
[J]. Sensors , 2019 , 19 (19 ): 4319
DOI:10.3390/s19194319
[本文引用: 1]
[25]
GE Y, CHEN J, CAO C, et al Design and test of a MEMS accelerometer array for submarine landslide displacement monitoring
[J]. Marine Technology Society Journal , 2021 , 55 (1 ): 5 - 16
DOI:10.4031/MTSJ.55.1.7
[本文引用: 1]
[26]
GE Y, CHEN J, CAO C, et al. A new type of device used on submarine landslides monitoring [C]// ASME 2020 39th International Conference on Ocean, Offshore and Arctic Engineering . Online: ASME, 2020, 6A: V06AT06A025.
[本文引用: 1]
Grand challenge: timescales and processes of methane hydrate formation and breakdown, with application to geologic systems
1
2020
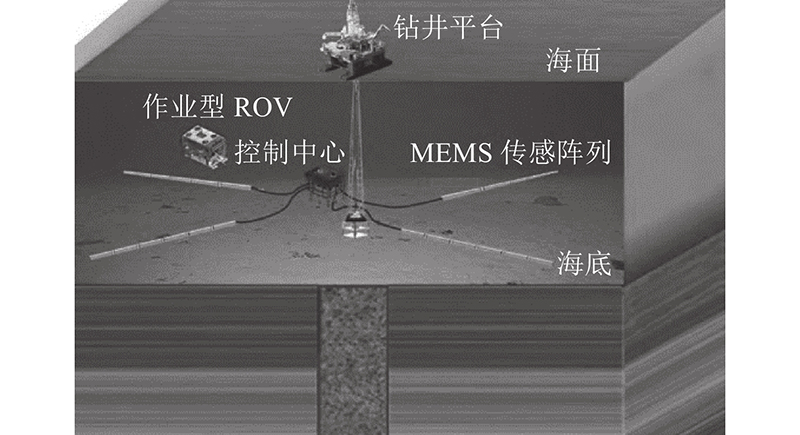
... 天然气水合物是天然气与水在高压、低温、气通量充足的条件下形成的笼型结晶化合物,由于在常温常压下遇火可燃,俗称“可燃冰”[1 -2 ] . 天然气水合物具有分布广泛、埋藏浅、资源量大、能量密度高、洁净等特点,有望成为21世纪理想的新能源[3 ] . 温度升高或压力降低都有可能使天然气水合物失稳而分解产生大量的气体和水,导致地层液化,诱发井壁失稳、滑坡、塌陷等工程事故与灾害,对海底的管道、通信电缆、光缆等工程设施、开采工程构筑物与周围环境造成严重影响[4 -5 ] . ...
Mechanisms of methane hydrate formation in geological systems
1
2019
... 天然气水合物是天然气与水在高压、低温、气通量充足的条件下形成的笼型结晶化合物,由于在常温常压下遇火可燃,俗称“可燃冰”[1 -2 ] . 天然气水合物具有分布广泛、埋藏浅、资源量大、能量密度高、洁净等特点,有望成为21世纪理想的新能源[3 ] . 温度升高或压力降低都有可能使天然气水合物失稳而分解产生大量的气体和水,导致地层液化,诱发井壁失稳、滑坡、塌陷等工程事故与灾害,对海底的管道、通信电缆、光缆等工程设施、开采工程构筑物与周围环境造成严重影响[4 -5 ] . ...
Review of natural gas hydrates as an energy resource: prospects and challenges
1
2016
... 天然气水合物是天然气与水在高压、低温、气通量充足的条件下形成的笼型结晶化合物,由于在常温常压下遇火可燃,俗称“可燃冰”[1 -2 ] . 天然气水合物具有分布广泛、埋藏浅、资源量大、能量密度高、洁净等特点,有望成为21世纪理想的新能源[3 ] . 温度升高或压力降低都有可能使天然气水合物失稳而分解产生大量的气体和水,导致地层液化,诱发井壁失稳、滑坡、塌陷等工程事故与灾害,对海底的管道、通信电缆、光缆等工程设施、开采工程构筑物与周围环境造成严重影响[4 -5 ] . ...
Experimental research on seafloor mapping and vertical deformation monitoring for gas hydrate zone using nine-axis MEMS sensor tapes
3
2018
... 天然气水合物是天然气与水在高压、低温、气通量充足的条件下形成的笼型结晶化合物,由于在常温常压下遇火可燃,俗称“可燃冰”[1 -2 ] . 天然气水合物具有分布广泛、埋藏浅、资源量大、能量密度高、洁净等特点,有望成为21世纪理想的新能源[3 ] . 温度升高或压力降低都有可能使天然气水合物失稳而分解产生大量的气体和水,导致地层液化,诱发井壁失稳、滑坡、塌陷等工程事故与灾害,对海底的管道、通信电缆、光缆等工程设施、开采工程构筑物与周围环境造成严重影响[4 -5 ] . ...
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
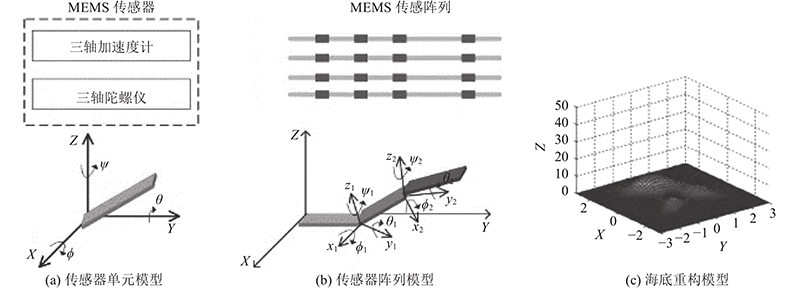
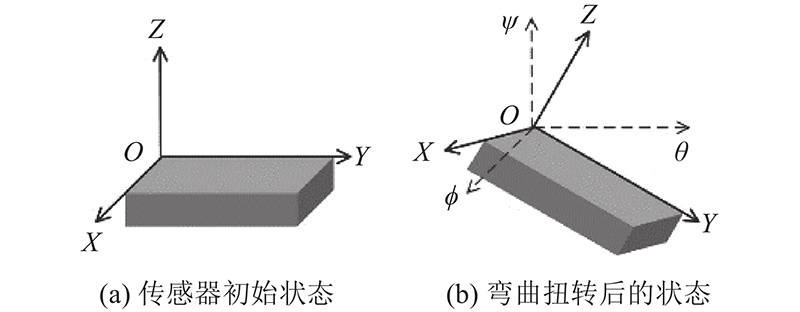
... 将MEMS传感阵列布放在海底表面,当海底发生形变(沉降或抬升),传感阵列随之发生相应的弯曲或扭转. 如图7 所示,弯曲相当于传感器绕Y 、Z 轴旋转(分别为姿态角中俯仰角 $\theta $ $\psi $ $\phi$ [4 ] ,计算式为 ...
海底天然气水合物开采导致的地质灾害及其监测技术
1
2017
... 天然气水合物是天然气与水在高压、低温、气通量充足的条件下形成的笼型结晶化合物,由于在常温常压下遇火可燃,俗称“可燃冰”[1 -2 ] . 天然气水合物具有分布广泛、埋藏浅、资源量大、能量密度高、洁净等特点,有望成为21世纪理想的新能源[3 ] . 温度升高或压力降低都有可能使天然气水合物失稳而分解产生大量的气体和水,导致地层液化,诱发井壁失稳、滑坡、塌陷等工程事故与灾害,对海底的管道、通信电缆、光缆等工程设施、开采工程构筑物与周围环境造成严重影响[4 -5 ] . ...
海底天然气水合物开采导致的地质灾害及其监测技术
1
2017
... 天然气水合物是天然气与水在高压、低温、气通量充足的条件下形成的笼型结晶化合物,由于在常温常压下遇火可燃,俗称“可燃冰”[1 -2 ] . 天然气水合物具有分布广泛、埋藏浅、资源量大、能量密度高、洁净等特点,有望成为21世纪理想的新能源[3 ] . 温度升高或压力降低都有可能使天然气水合物失稳而分解产生大量的气体和水,导致地层液化,诱发井壁失稳、滑坡、塌陷等工程事故与灾害,对海底的管道、通信电缆、光缆等工程设施、开采工程构筑物与周围环境造成严重影响[4 -5 ] . ...
Review of underwater cable shape detection
1
2016
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
AUV 搭载多波束声纳进行地形测量的现状及展望
1
2016
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
AUV 搭载多波束声纳进行地形测量的现状及展望
1
2016
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
2
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
... [8 ],该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
1
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
1
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
1
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
海洋时空基准网的进展与趋势
1
2019
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
海洋时空基准网的进展与趋势
1
2019
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Shallow slow slip events along the nankai trough detected by GNSS-A
1
2020
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Seafloor crustal deformation data along the subduction zones around Japan obtained by GNSS-A observations
0
2018
DARPA Eyes proposers’s day for undersea positioning system
1
2015
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Underwater navigation based on real-time simultaneous sound speed profile correction
1
2016
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Ocean observatories as a tool to advance gas hydrate research
1
2019
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Monitoring the vertical changes of a tidal flat using a MEMS accelerometer array
1
2020
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
1
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Evaluation of soft clay field consolidation using mems-based in-place inclinometer-accelerometer array
1
2015
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Dynamics of bottom boundary layers in the yellow river subaqueous delta based on long-term in-situ observations
1
2017
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Storm wave reactivation of a submarine landslide
1
1989
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Precaution and early warning of surface failure of slopes using tilt sensors
1
2015
... 现有的海洋测绘设备(多波束测深仪、侧扫声纳等)的观测时间短、观测周期长且空间分辨率低,一般需要搭载在科研船、遥控无人潜水器(remote operated vehicle,ROV)或自主式水下潜器(autonomous underwater vehicle,AUV)上,难以实现海底地形形变的长期原位监测[6 -7 ] . Yokoyama等[8 -9 ] 采用伺服加速度计系统和压力传感器测量海床稳定性和海床下沉或隆起. 无论是伺服加速度计系统还是压力传感器,测量区域均有限,只能实现单点测量. 基于高精度海洋声学设备的海洋大地基准监测技术可以实现对海底目标物的长期实时监测[10 -12 ] . Yokota等[13 -15 ] 为了监测海底地壳运动,分别在研究海域布设大量的声学基准点测量系统和全球导航卫星系统(global navigation satellite system-acoustic, GNSS-A). 尽管随着GNSS-A和海洋声学观测设备的观测精度日益提高,测量精度不再是GNSS-A的制约因素,但是在复杂动态变化的海洋环境下,基于声学设备的海洋大地基准测量仍存在技术理论模型及误差模型不完善的主要瓶颈[16 ] . 海底观测站可以对水合物试采区的环境进行原位监测[17 ] ,但通常固定在海床上,机动性差、成本高、部署困难. 与传统传感器相比,微机电系统(micro-electro-mechanical system, MEMS)传感器具有体积小、重量轻、功耗低、成本低、易于智能化和数字化等优点[4 ] . MEMS传感器相关的形变监测技术逐渐被引入地质形变测量领域[18 -19 ] . Measurand公司使用MEMS加速度计阵列监测被测物体的空间形状[8 ] ,该公司生产的阵列式位移计(shape accel array, SAA)监测系统已广泛应用于隧道掘进过程变形、大坝变形、滑坡、三角洲海底地层变形等领域[20 -21 ] . Prior等[22 ] 使用三轴 MEMS 加速度传感器监测黄河三角洲因风暴引起的海床滑坡变形. Uchimura等[23 ] 将MEMS倾斜传感器和容积式含水量传感器应用于滑坡监测. 该套设备已安装部署在多个滑坡现场,在现场应用中证明了其在滑坡监测中的可行性和可靠性. ...
Experimental research on data synchronous acquisition method of subsidence monitoring in submarine gas hydrate mining area
1
2019
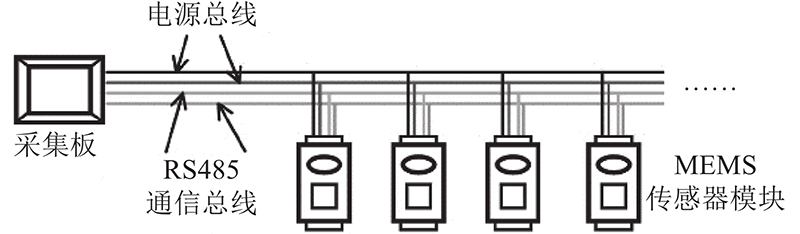
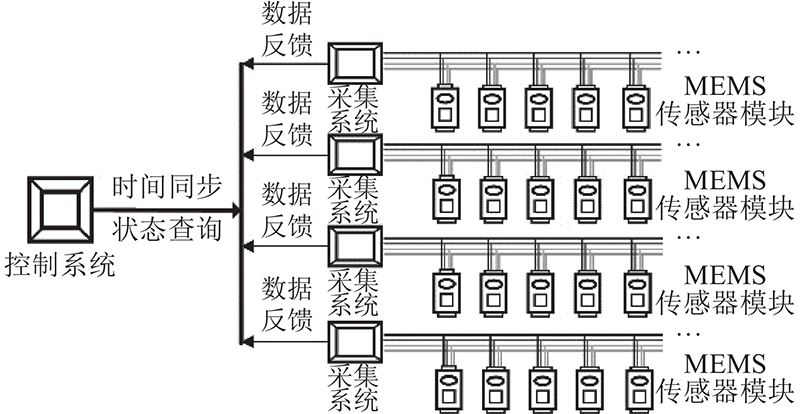
... 传感节点过多(4条传感阵列共100个节点),超出了1块采集板的通信负荷,因此采用多条传感阵列配合多个采集板进行同步采集. 采集板本身存在物理性质差异导致时间漂移(内部晶振、环境温度、湿度等),即使多个采集板在同一时刻开始工作,也很难保证长时间连续工作后仍然保持同步采集[24 ] . 为此,开发基于继电器的采集控制板控制采集,通过继电器对多个采集板进行启停控制. 基于上述原理,系统还可实现休眠模式. 采集控制系统如图5 所示. ...
Design and test of a MEMS accelerometer array for submarine landslide displacement monitoring
1
2021
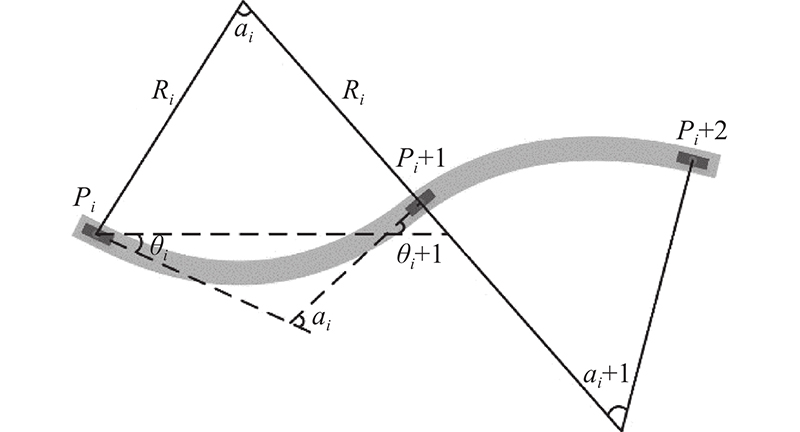
... 如图8 所示,对于传感阵列,地形形变(沉降或抬升)可以看成垂直方向上的二维变化,传感器间的形状可以采用圆弧近似表示[25 -26 ] 为 ...
1
... 如图8 所示,对于传感阵列,地形形变(沉降或抬升)可以看成垂直方向上的二维变化,传感器间的形状可以采用圆弧近似表示[25 -26 ] 为 ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}