

基于机器视觉的隧道衬砌裂缝检测方法需要配置光源对相机进行补光,对图像的同步拍摄、高速存储、图像特征高性能识别技术的要求较高[5,9-10]. Yu等[11]开发基于 CCD 相机的隧道衬砌裂缝检测系统,初步实现了隧道衬砌裂缝的自动检测. 王平让等[12]根据衬砌裂缝图像不同方向上的亮度差异,将裂缝识别问题转化为裂缝像素和背景像素的最优分割问题,验证了该方法的识别效果. Stent 等[13]开发基于多个线阵 CCD 相机和光源装置的裂缝识别系统,能够识别宽度大于0.3 mm的裂缝. 薛亚东等[14]利用深度卷积神经网络训练方法,实现了隧道衬砌特征图像的分类. 江桁等[15]提出用于定向识别公路隧道衬砌裂缝的模型. 结果表明,该模型的适用性较强. Huang等[16]提出考虑振动引起图像位移差别、利用 Otsu 方法的裂缝识别算法,通过试验验证了该方法的有效性. Jiang等[17]开发隧道衬砌健康检测与评估系统. 利用该系统,能够有效地提取裂缝信息. 唐钱龙等[18]在衬砌裂缝识别中考虑隧道环境引起拍摄图像光照不均且噪声严重的问题,提出算法的衬砌裂缝识别准确率大于92%. 石钰锋等[19]提出将衬砌图像进行拼接处理再计算裂缝长度的方法,利用该方法能够还原出真实裂缝的形态信息.
尽管目前的研究涵盖了基于机器视觉隧道衬砌裂缝检测的多个方面,但存在以下问题. 1)隧道衬砌图像获取过程中没有或较少考虑相机平台振动对检测结果的影响. 2)相机平台振动误差补偿稳定性较差,检测精度不高.
本文针对现有隧道衬砌裂缝检测技术的识别准确率不高、检测数据可靠性差的问题,提出基于图像补偿的隧道衬砌裂缝检测方法.
1. 隧道衬砌裂缝检测系统及检测流程
1.1. 隧道衬砌裂缝检测系统
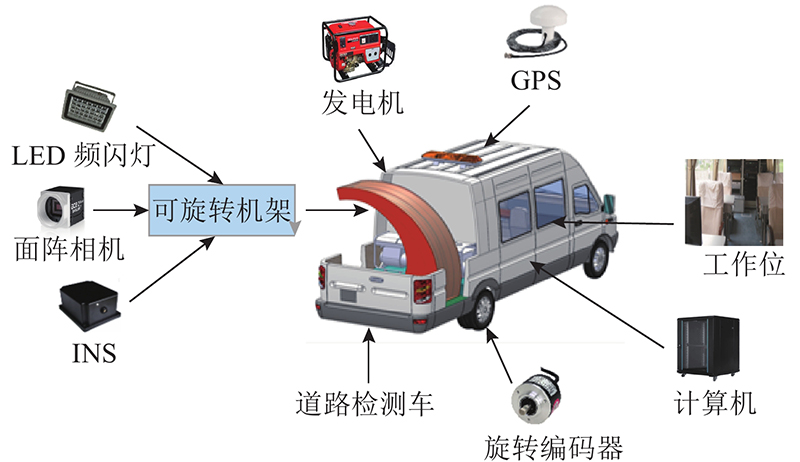
隧道衬砌图像的检测系统如图1所示. 图中,可旋转的弧形机架为图像采集平台,上面安装有多个相机、多个LED 频闪灯和1个INS. 一个相机周围布置若干个 LED 频闪照明灯. 采集系统通过分频器的脉冲信号,对照明灯和相机进行同步触发拍摄图像.
图 1
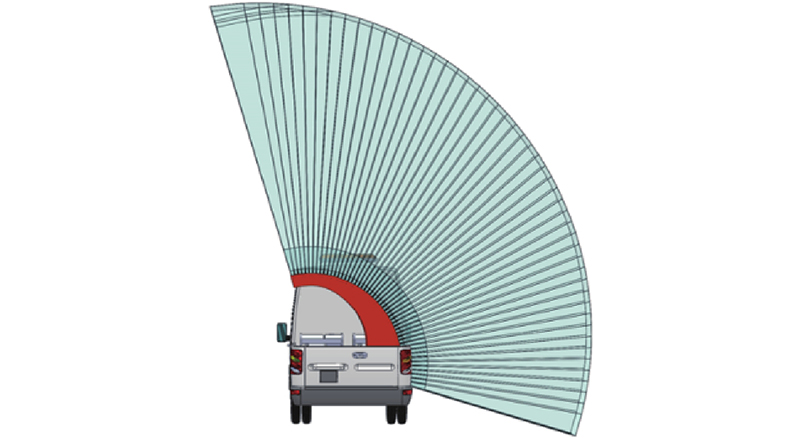
根据设计要求可知,衬砌图像的分辨率为0.2 mm,需要多台相机同步拍摄. 由于检测过程中检测平台本身存在振动,为了不出现衬砌的漏检,相邻2个相机视场的重叠区域不小于15%,各相机的视场分布如图2所示.
图 2
1.2. 隧道衬砌裂缝检测方法的流程
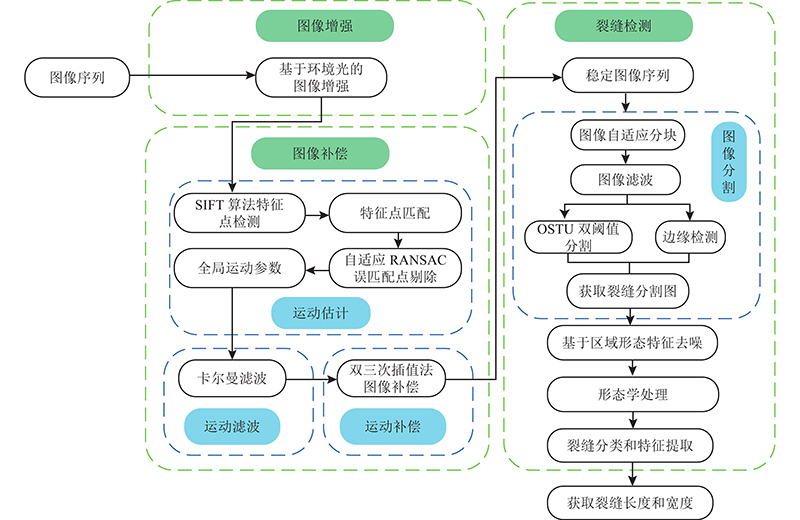
基于图像补偿的隧道衬砌裂缝检测方法流程如图3所示. 对采集到的隧道衬砌图像进行环境光图像增强,得到明暗均匀的衬砌图像. 对衬砌图像采用尺度不变特性变换(scale invariant feature transform, SIFT)算法检测特征点,用自适应随机抽样一致性 (random sample consensus, RANSAC)算法去除误匹配,得到全局运动参数. 建立图像帧间的运动关系,用卡尔曼滤波算法对运动参数进行处理,去除相机无规则抖动,经过双三次插值方法完成图像补偿. 对图像补偿后的隧道衬砌图像进行裂缝检测,对大尺寸图像进行自适应分块,提高图像的处理速度. 进行中值滤波和双边滤波融合的图像滤波处理,对滤波后的图像进行边缘检测、裂缝图像去噪和形态学处理,分割出裂缝图像. 对裂缝图像进行分类和特征提取,获得裂缝类别、裂缝长度和宽度等特征信息.
图 3
2. 图像补偿
2.1. 图像增强
在开展隧道衬砌图像采集的过程中,由于隧道环境较暗且隧道内壁呈弧形,LED 频闪灯的光能在隧道衬砌表面呈现不均匀分布,需要对所拍摄的图像进行处理,解决图像对比度差和图像较暗的问题,获得明暗均匀的图像.
采用基于环境光的图像增强方法,假设光的衰减是均匀的,则图像增强模型[20]为
式中:
从式(1)、(2)可知,计算全局的灰度
式中:
全局灰度估计为
式中:
增强后的图像灰度为
增强后的隧道衬砌图像如图4所示. 可以看出,图像明暗程度和亮度变化都较均匀.
图 4
2.2. 运动估计与运动滤波
对增强后的隧道衬砌图像进行运动估计,运动估计是图像补偿算法的关键. 利用运动估计算法,得到目标图像与图像采集平台之间的相对运动参数. 利用运动参数补偿图像误差,将图像采集平台的不规则抖动提取出来,补偿由采集平台振动引起的图像误差,图像补偿后可以得到输出稳定的图像序列. 提出基于特征点匹配的自适应 RANSAC 衬砌图像运动估计算法. 利用 SIFT 算法进行特征点检测,采用 KD-tree(K-dimensional tree)算法对特征点进行初筛选,初匹配后的图像如图5所示.
图 5
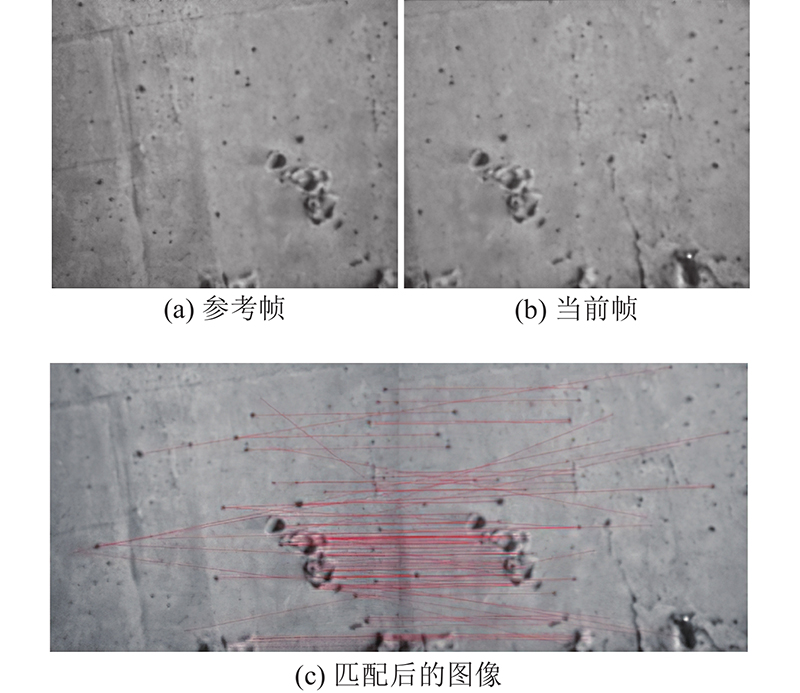
从图5可以看出,图像中有许多误匹配点,在计算运动参数时,特征点正确匹配的数目越多,得到的运动参数精度越高.
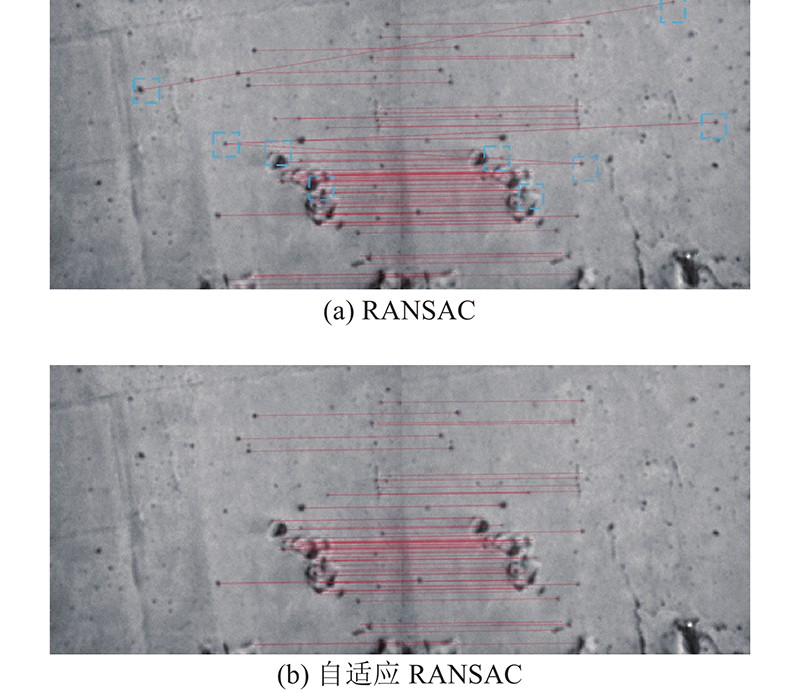
采用自适应 RANSAC 算法,从所有匹配点中筛选出正确的匹配点. 算法的基本思想是选择合适的阈值,利用确定的阈值,将匹配点分为正确匹配点和不正确匹配点2类,实现正确匹配点的筛选. 算法的步骤如下.
1)计算所有匹配点
式中:
2)根据下式计算匹配点
式中:
3)选择阈值数目
根据下式确定这
式中:
4)按照下式对
若阈值小于d
5)对所有
6)减少正确匹配类的方差,增加不匹配类的方差,即减小第1类的方差,增大第2类的方差,则第1类中特征点的距离减小,可能会出现只有一个数据且方差为0的情况. 为了避免出现该情况,按下式确定阈值:
7)从
利用该阈值对图像进行处理,得到筛选匹配后的结果,如图6所示.
图 6
运动滤波是为了去除图像采集平台的高频无规则振动对图像产生的影响.采用卡尔曼滤波,对图像序列进行处理,提高图像补偿方法的适应性.图像当前帧参考前一帧,由当前帧对下一帧进行预测. 对于每帧图像来说,由于采集平台的振动,所拍摄的图像相对于平台不动时会产生拍摄误差. 通过运动估计获得每帧图像的运动参数,即图像在
图 7

从图7可以看出,经过卡尔曼滤波后的运动参数曲线变得更加平滑,高频噪声消除明显,运动参数的稳定性提高.
2.3. 图像补偿
在得到去除了高频噪声的运动参数后,对图像进行补偿. 利用滤波后的运动轨迹与真实轨迹的差值,对原始图像进行变换处理,得到一组输出稳定、平滑的图像序列. 为了提高像素分析的精度,采用双三次插值法获得图像像素. 与双线性插值法相比,三次插值法利用更多的像素点,对待测图像采取加权内插方法,获得所求的像素灰度,算法思想如图8所示.
图 8
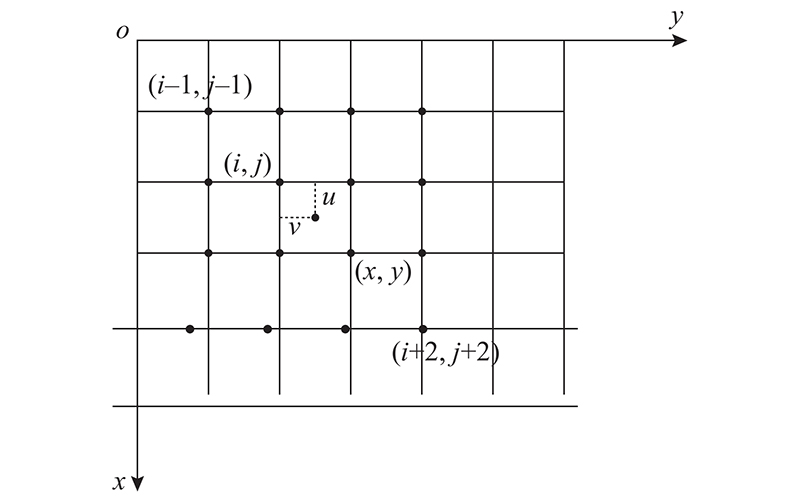
函数
只要求得
3. 隧道衬砌裂缝检测
3.1. 图像分割
1)自适应分块. 车载隧道衬砌检测系统所采集图像的分辨率为2 448×2 048像素,全尺寸分析处理速度较慢. 为了提高处理速度,对图像进行分块,在分块后进行图像处理.
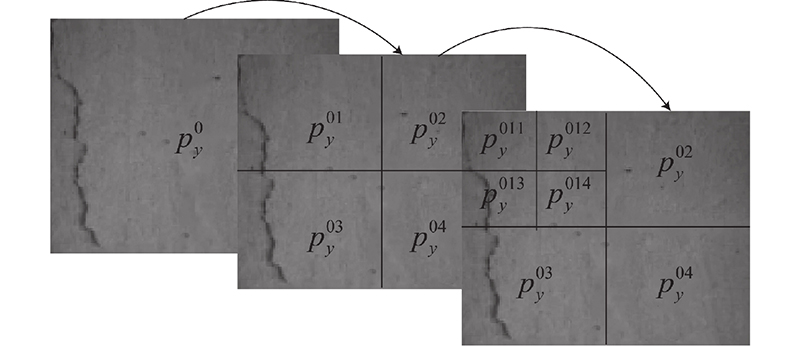
熵值可以表示一幅图像的复杂性,熵值小的图像的分割误差较小. 若按固定尺寸对图像进行分块,则会使图像块的复杂度不同,产生较大的分割误差. 自适应分块可以根据不同的图像复杂度,对图像进行分块. 熵值的计算公式为
式中:
图像自适应分块方法如图9所示. 若
图 9
a)平滑:使用高斯滤波器,对图像进行平滑去噪.
b)梯度计算:计算图像在水平和垂直方向上的梯度,在图像梯度具有较大幅度的地方找到边缘.
c)非极大值抑制:排除非边缘像素,对保留的部分细线进行边缘细化,锐化边缘特征.
d)阈值滞后化:设置阈值
Canny 算法对噪声的敏感性受边缘参数的影响,对检测细节和定位误差的影响都较大. 当
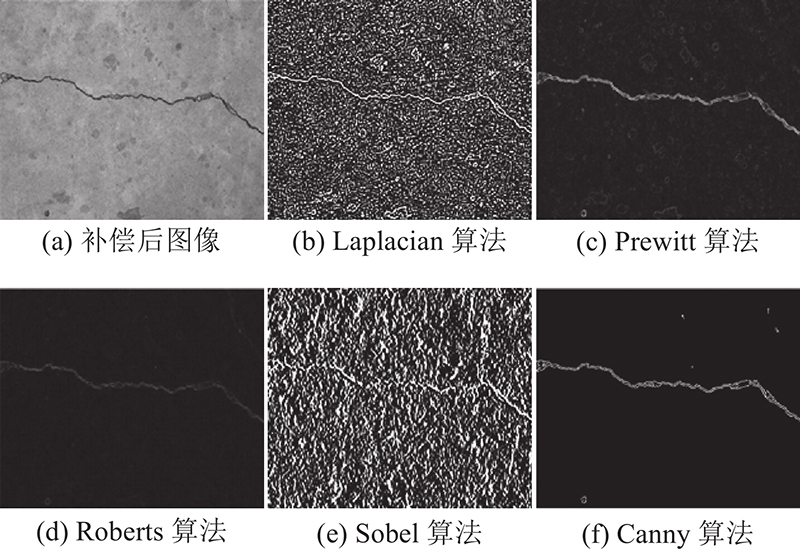
几种边缘检测算法的效果对比如图10所示. 可以看出,利用Laplacian 和 Sobel 算法提取裂缝的效果较差且噪点较多. 利用Prewitt 算法能够提取裂缝,但有少量噪点. 利用Roberts 算法得到的图像噪点较少,但是裂缝提取不够完整. Canny 算法的提取效果最好,只有少量的孤立噪点.
图 10
设图像
式中:
对衬砌图像遍历使
图 11
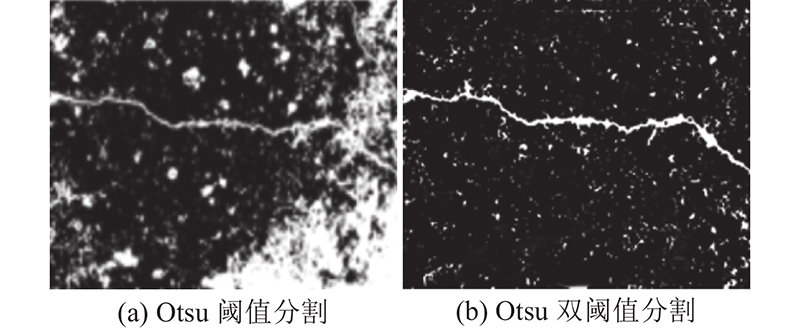
图 12
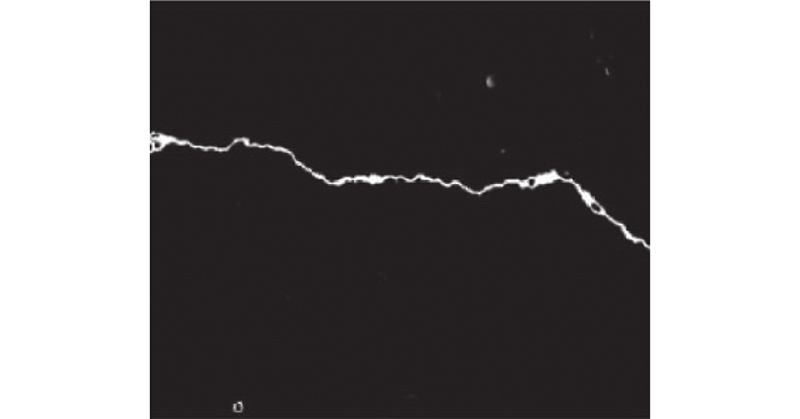
图 12 Canny和Otsu双阈值综合方法的处理结果
Fig.12 Result of Canny and Otsu dual threshold synthesis
3.2. 基于区域形状特征的去噪和形态学处理
1)基于区域形状特征去噪. 由于分割处理后的图像存在少量噪点,采用基于区域形状特征去噪. 实质是根据区域形状特征对输入的衬砌裂缝特征进行提取,达到去除噪点的目的. 算法如下. 将由图像分割得到的二值化图像分成
2)形态学处理. 利用形态学方法去除已分割出裂缝二值化图像中的个别噪点,保留衬砌裂缝. 在形态学处理中,主要采用腐蚀和膨胀. 利用图像的开运算和闭运算进行形态学处理. 开运算是先腐蚀后膨胀,能够使目标图像的轮廓更加平滑,断开狭小间隙. 闭运算是先膨胀后腐蚀,能够去除裂缝周围的毛刺和平细孔洞.经过区域形状特征去噪和形态学处理后的衬砌裂缝分割结果如图13所示.
图 13
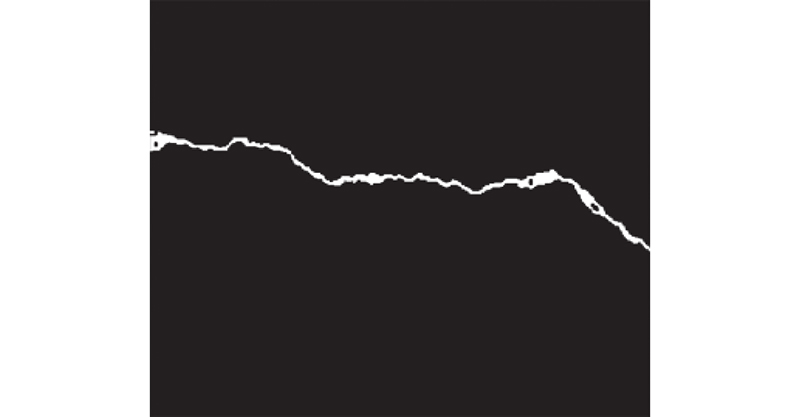
图 13 区域形状特征去噪和形态学处理结果
Fig.13 Results of region feature denoising and morphology
3.3. 裂缝分类及特征提取
1)裂缝分类. 目前还未出台隧道衬砌裂缝分类的相关标准,但是不同走向的裂缝会对隧道安全产生不同权重的影响. 隧道衬砌裂缝的不同走向及发展趋势直接影响隧道安全评估的结果. 按照工程中的实际应用需求,将隧道衬砌裂缝按照走势大致分为横向、纵向和斜向裂缝. 以图像的横向为
斜向裂缝与
可以计算得到
2)裂缝长度计算. 裂缝粗细变化会影响长度的计算,将裂缝图转化为裂缝骨架图,求得裂缝骨架的长度,即为裂缝长度. 利用骨架图计算裂缝长度的方法如下:将裂缝骨架图分成b个矩形区域,计算每个区域内各点之间的距离,取最长距离为该区域的裂缝长度:
式中:
将
3)裂缝宽度计算. 裂缝宽度的计算流程如图14所示.
图 14
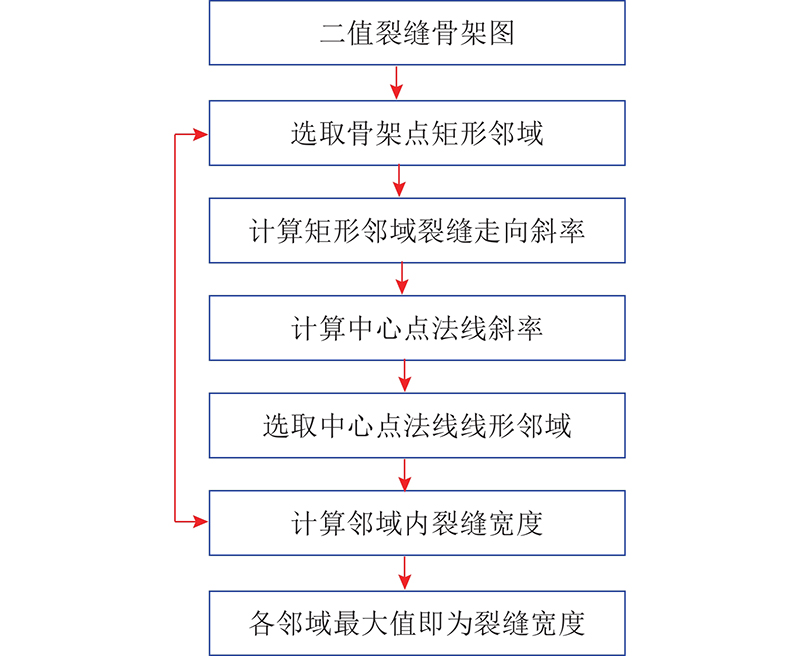
选择裂缝图像上的一个点,选择该点的一个矩形邻域区域,矩形邻域的大小会对裂缝宽度的计算精度产生影响. 通过测试,选择的矩形邻域大小为
图 15
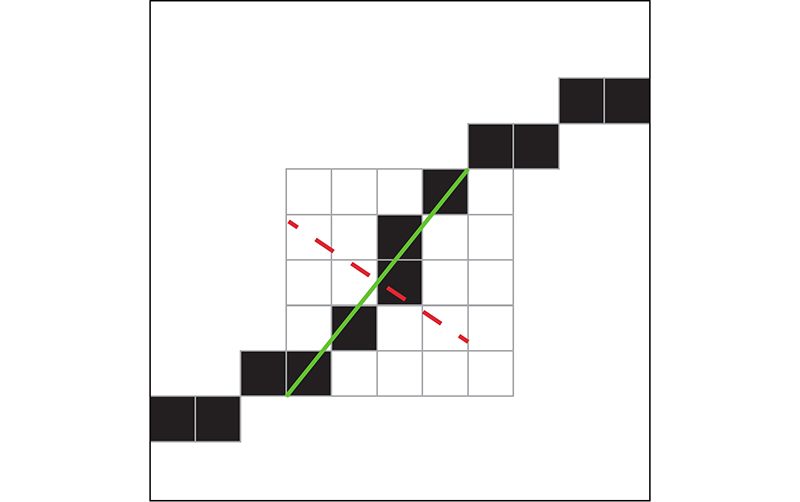
在计算得到中心点法线后,在中心点沿法线方向上确定线型邻域. 设
式中:
设
该矩形邻域内的裂缝宽度为
将整个裂缝图像上每个矩形邻域内裂缝宽度的最大值作为总裂缝宽度,
4. 实验与分析
4.1. 补偿结果的对比分析
开发的隧道检测车在秦岭隧道进行隧道衬砌图像采集,对采集到的衬砌图像利用提出的方法进行处理. 在图像采集过程中,检测车按照高速公路的交规要求通过隧道;在实际的运行过程中,由于高速公路运行环境的变化,检测车根据实时车流信息有多次加速和制动过程. 选择一段具有典型裂缝的隧道进行对比试验,隧道长度大约为500 m,共采集图像1 200帧,每张图像大小为2 448像素×2 048像素.
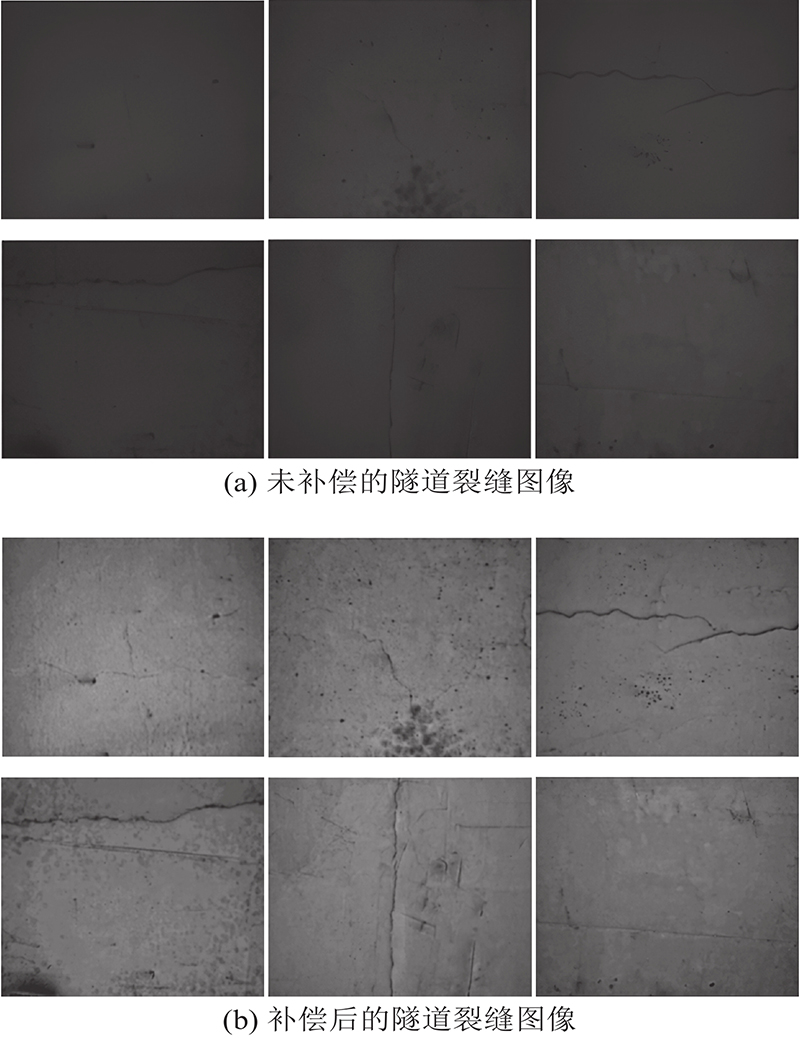
对采集图像利用该补偿方法进行处理,部分具有典型裂缝的原始图像与补偿方法处理后的图像对比如图16所示. 可知,利用提出的隧道衬砌动态检测图像补偿方法,能够改善图像质量,减少采集平台振动对图像产生的影响,为后续隧道病害裂缝的定量检测提供良好的基础.
图 16
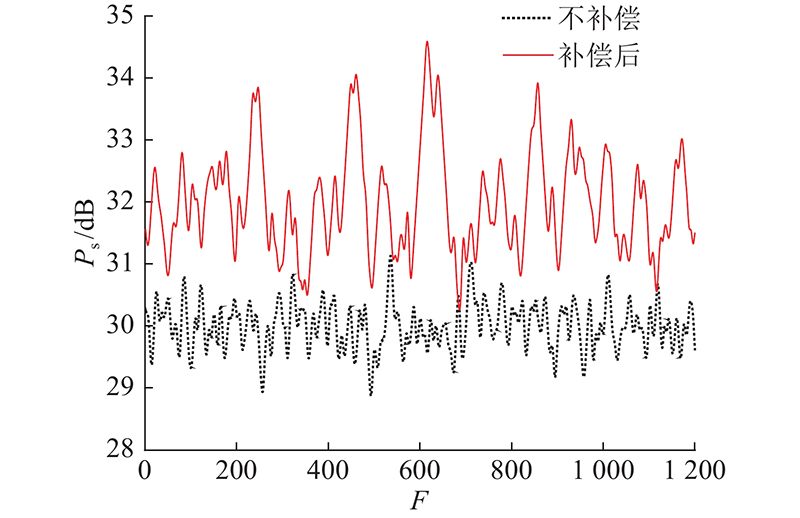
为了精确地评价该补偿方法的性能,选取峰值信噪比(peak signal to noise ratio, PSNR)指标定量评价图像补偿前、后的效果,用
式中:
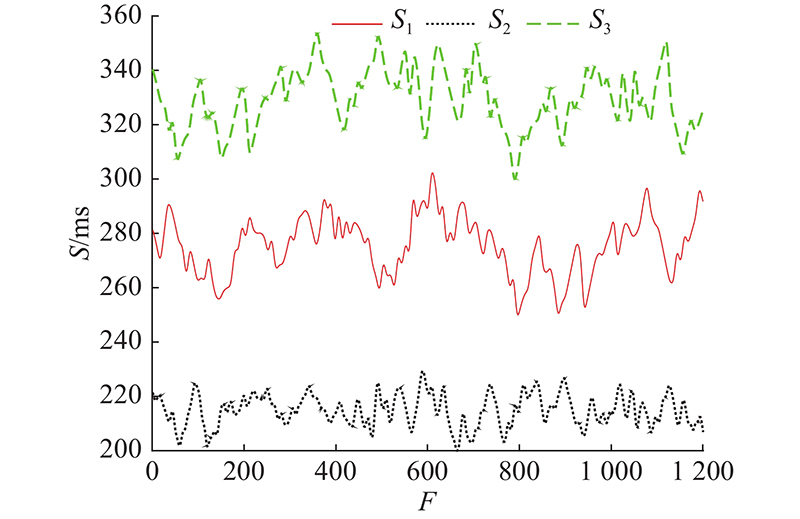
计算所有图像的峰值信噪比,结果如图17所示. 可知,利用该方法补偿处理后图像的峰值信噪比均高于未补偿前,说明图像质量得到了提升. 本文方法对检测平台的随机运动具有良好的校正性能,能够补偿图像动态采集的误差.
图 17
4.2. 运行效率与识别精度的对比
在图像补偿方法的基础上,分析裂缝识别的计算效率和准确度. 采用的计算环境如下:处理器为Core i7-8700k ,显卡为 GeForce GTX1080Ti,16 GB,算法库采用numpy 1.19.4 和OpenCV 4.5.0.
为了评价所提方法的运行效率,采用单帧运行时间(single frame running time, SFRT)进行定量评价,用
本文方法主要包括以下2部分. 1)利用补偿方法对拍摄的图像进行处理,改善图像质量,补偿采集平台振动产生的误差,该部分单张图像的SFRT值用
测试1 200 帧所拍摄的隧道图像处理的运行时间,对比结果如图18所示. 可以看出,本文补偿方法的平均运行时间为275.45 ms,本文方法的裂缝识别及参数计算平均时间为214.86 ms,不采用自适应分块的裂缝识别及参数计算平均时间为329.18 ms. 利用本文的自适应分块方法,处理速度提升了37.73%.
图 18
为了验证本文方法的检测精度,开展检测精度对比试验. 利用图像补偿和自适应图像分割与形态学处理后得到的裂缝信息为像素域内信息. 在像素域内能够利用提出的方法,判定裂缝的类别.在像素域内得到的裂缝长度和宽度为像素,要得到物理的长度和宽度,须进行系统标定. 通过标定试验得到检测系统每个相机的参数矩阵,得到图像像素与距离之间的对应关系,按照参数矩阵以像素坐标为基础计算裂纹的长度和宽度.在该试验前,对每个相机的参数进行标定,可以直接利用参数计算裂缝宽度和长度.
在所检测的500 m隧道中挑选10段,开展检测精度的对比分析. 利用图像补偿和裂缝检测方法计算的值表述为补偿后结果. 不进行图像补偿处理,仅利用裂缝检测方法计算的值表述为不补偿结果. 利用人工测量得到的值表述为真实值.
采用本文的图像补偿方法和不采用图像补偿方法进行裂缝类别检测的结果如表1所示. 若算法识别的类别如果和真实结果一致,则标记为“是”;若不一致,则标记为“否”.
表 1 裂缝类别的对比结果
Tab.1
| 隧道桩号 | 真实结果 | 补偿后结果 | 不补偿结果 |
| XZ11+024~XZ11+034 | 斜向裂缝 | 是 | 否 |
| XZ11+084~XZ11+094 | 斜向裂缝 | 是 | 是 |
| XZ11+134~XZ11+144 | 纵向裂缝 | 是 | 是 |
| XZ11+194~XZ11+204 | 纵向裂缝 | 是 | 是 |
| XZ11+284~XZ11+294 | 横向裂缝 | 是 | 是 |
| XZ11+314~XZ11+324 | 斜向裂缝 | 是 | 是 |
| XZ11+374~XZ11+384 | 斜向裂缝 | 是 | 否 |
| XZ11+414~XZ11+424 | 斜向裂缝 | 是 | 是 |
| XZ11+464~XZ11+474 | 斜向裂缝 | 是 | 是 |
| XZ11+514~XZ11+524 | 斜向裂缝 | 是 | 否 |
从表1可以看出,利用本文方法进行裂缝类别识别的结果与人工判断完全一致,裂缝类别识别的准确率为100%. 图像不补偿方法的识别准确率为70%,主要原因是没有进行图像补偿,图像质量较差.
表 2 裂缝长度的对比结果
Tab.2
| 隧道桩号 | D/mm | ||
| 真实值 | 补偿后值 | 未补偿值 | |
| XZ11+024~XZ11+034 | 271.0 | 278.4 | 261.2 |
| XZ11+084~XZ11+094 | 150.0 | 152.3 | 170.6 |
| XZ11+134~XZ11+144 | 610.5 | 617.6 | 538.9 |
| XZ11+194~XZ11+204 | 578.5 | 580.2 | 493.2 |
| XZ11+284~XZ11+294 | 321.0 | 323.6 | 372.4 |
| XZ11+314~XZ11+324 | 301.5 | 306.6 | 320.7 |
| XZ11+374~XZ11+384 | 402.5 | 408.7 | 380.9 |
| XZ11+414~XZ11+424 | 380.0 | 384.6 | 372.6 |
| XZ11+464~XZ11+474 | 260.7 | 264.1 | 256.8 |
| XZ11+514~XZ11+524 | 320.5 | 327.8 | 339.1 |
表 3 裂缝宽度的对比结果
Tab.3
| 隧道桩号 | W/mm | ||
| 真实值 | 补偿后值 | 未补偿值 | |
| XZ11+024~XZ11+034 | 1.20 | 1.38 | 1.53 |
| XZ11+084~XZ11+094 | 1.07 | 1.23 | 0.98 |
| XZ11+134~XZ11+144 | 2.24 | 2.45 | 2.56 |
| XZ11+194~XZ11+204 | 1.79 | 1.94 | 2.13 |
| XZ11+284~XZ11+294 | 1.38 | 1.51 | 1.26 |
| XZ11+314~XZ11+324 | 0.61 | 0.71 | 0.81 |
| XZ11+374~XZ11+384 | 1.34 | 1.52 | 1.46 |
| XZ11+414~XZ11+424 | 1.50 | 1.67 | 1.37 |
| XZ11+464~XZ11+474 | 1.18 | 1.30 | 1.62 |
| XZ11+514~XZ11+524 | 1.45 | 1.60 | 1.78 |
利用补偿和不补偿方法得到的计算结果与真实值的误差如图19所示. 图中,
图 19
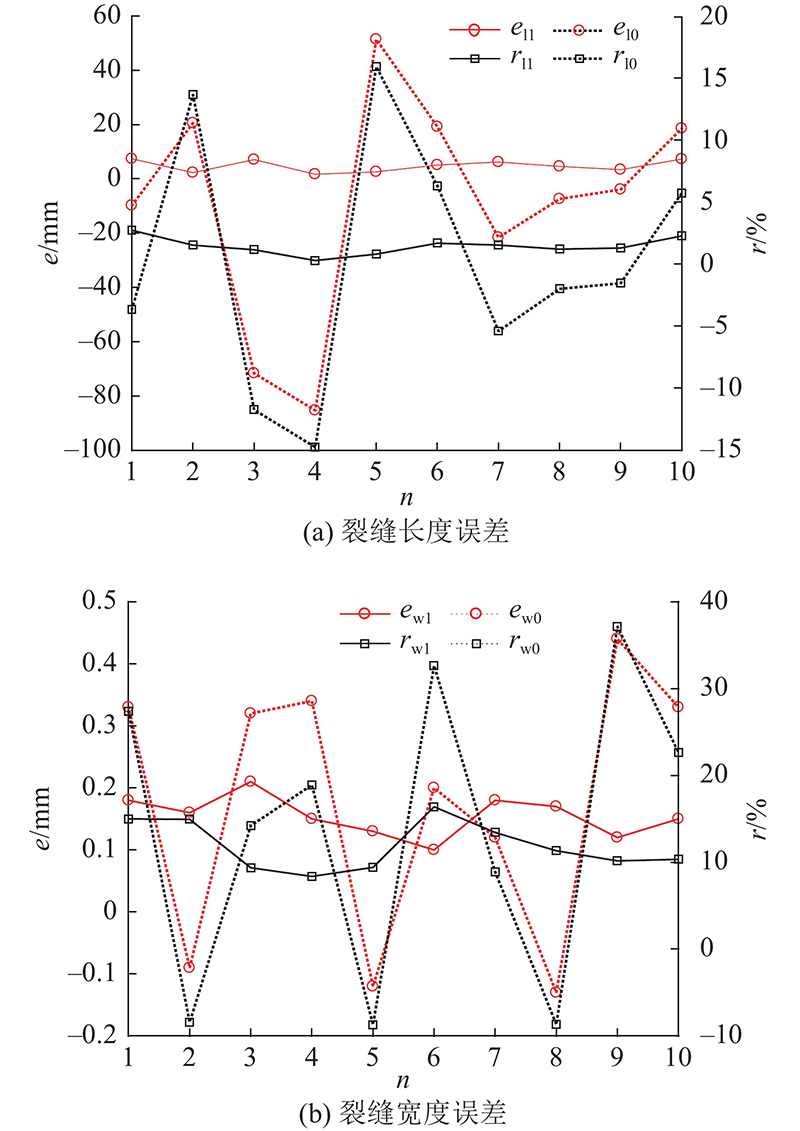
利用补偿方法计算得到的裂缝宽度与真实值的绝对误差用
5. 结 论
(1)利用提出的基于图像补偿的隧道衬砌裂缝检测方法,可以补偿图像采集平台的振动误差,对衬砌裂缝进行有效地分割、识别和参数测量. 试验结果表明,该方法的识别精度较高,稳定性较好.
(2)针对衬砌裂缝识别准确率不高、数据可靠性差的问题,提出结合特征点匹配的自适应运动估计与卡尔曼滤波的方法,实现了衬砌图像的误差补偿.
(3)由于隧道衬砌图像的复杂性,采用单一算法很难解决所有问题,未来可以结合本文方法与深度学习等方法,提升隧道衬砌裂缝的检测效果.
(4)本文主要研究高速公路隧道衬砌裂缝的检测方法,研究成果可以为高速公路隧道的自动化检测提供一定的理论指导和实践参考.
参考文献
基于线阵相机的运营隧道衬砌裂缝图像采集方法试验研究
[J].
Experimental research on image acquisition method of tunnel lining cracks based on line-scanning digital camera
[J].
基于数字图像的盾构隧道衬砌裂缝病害诊断
[J].
Diagnosis of structural cracks of shield tunnel lining based on digital images
[J].
隧道衬砌自动化检测及健康评价技术研究
[J].
Research on automatic detection and health assessment of tunnel lining
[J].
基于深度学习的隧道衬砌结构物探地雷达图像自动识别
[J].
Automatic recognition of ground penetrating radar image of tunnel lining structure based on deep learning
[J].
隧道检测设备的发展及未来展望
[J].DOI:10.3969/j.issn.1002-0268.2021.02.013 [本文引用: 2]
Development and future prospect of tunnel machine detection equipment
[J].DOI:10.3969/j.issn.1002-0268.2021.02.013 [本文引用: 2]
Deep learning based image instance segmentation for moisture marks of shield tunnel lining
[J].
公路隧道病害快速检测技术发展和应用现状
[J].
Development and application status of rapid detection technology of highway tunnel diseases
[J].
A coupled 3D laser scanning and digital image correlation system for geometry acquisition and deformation monitoring of a railway tunnel
[J].
Vision-based change detection for inspection of tunnel liners
[J].DOI:10.1016/j.autcon.2018.03.020 [本文引用: 1]
Tunnel contour detection during construction based on digital image correlation
[J].
Auto inspection system using a mobile robot for detecting concrete cracks in a tunnel
[J].DOI:10.1016/j.autcon.2006.05.003 [本文引用: 1]
基于图像局部网格特征的隧道衬砌裂缝自动识别
[J].DOI:10.3969/j.issn.1000-6915.2012.05.016 [本文引用: 1]
Automatic recognition of cracks in tunnel lining based on characteristics of local grids in images
[J].DOI:10.3969/j.issn.1000-6915.2012.05.016 [本文引用: 1]
Visual change detection on tunnel linings
[J].DOI:10.1007/s00138-014-0648-8 [本文引用: 1]
基于深度学习的盾构隧道衬砌病害识别方法
[J].
A method of disease recognition for shield tunnel lining based on deep learning
[J].
基于隧道快速检测车数据的公路隧道衬砌开裂识别模型研究
[J].
Research on crack identification of highway tunnel linings based on data obtained from the testing vehicle
[J].
Inspection equipment study for subway tunnel defects by grey-scale image processing
[J].
Quantitative condition inspection and assessment of tunnel lining
[J].
基于数字图像技术的隧道衬砌裂缝识别方法研究
[J].
Crack identification method for tunnel linings based on digital image technology
[J].
隧道衬砌裂缝精细化识别及其评价
[J].
Refined identification of tunnel lining cracks and its evaluation
[J].
基于亮通道色彩补偿与融合的水下图像增强
[J].
Color compensation based on bright channel and fusion for underwater image enhancement
[J].
基于计算机视觉路面裂缝的识别与测量
[J].
Recognition and measurement of pavement cracks based on computer vision
[J].
一种新的路面裂缝自动检测算法
[J].
Novel automatic pavement crack detection algorithm
[J].
融合深度学习聚类分割和 形态学的混凝土表面裂缝量化识别
[J].
Quantitative identification of concrete surface cracks based on deep learning clustering segmentation and morphology
[J].
基于多特征的路面裂缝目标提取方法
[J].
Pavement crack object extraction method based on multi-features
[J].
基于自适应阈值Canny算法的裂缝检测方法研究
[J].
An adaptive threshold-based Canny algorithm for crack detection
[J].
改进的Canny算子在裂缝检测中的应用
[J].
Application of improved canny operator in crack detection
[J].
基于OpenCV和改进Canny算子的路面裂缝检测
[J].DOI:10.3969/j.issn.1000-7024.2014.12.038 [本文引用: 1]
Pavement crack detection based on OpenCV and improveed Canny operator
[J].DOI:10.3969/j.issn.1000-7024.2014.12.038 [本文引用: 1]
一种改进的用于裂缝图像分割的Otsu方法
[J].
An improved Otsu method for image segmentation of cracks
[J].
基于图像灰度变换的OTSU阈值优化算法
[J].
OTSU threshold optimization algorithm based on image gray level transformation
[J].
二维Otsu拟合线阈值图像分割方法
[J].DOI:10.3969/j.issn.1671-1815.2021.09.038
Image segmentation with two-dimensional Otsu fitting line threshold method
[J].DOI:10.3969/j.issn.1671-1815.2021.09.038
改进的OTSU和最大熵结合的迭代图像分割算法
[J].DOI:10.3969/j.issn.2095-2163.2020.12.027 [本文引用: 1]
An improved image segmentation algorithm based on Otsu and maximum entropy
[J].DOI:10.3969/j.issn.2095-2163.2020.12.027 [本文引用: 1]
基于形态学和小波变换的图像边 缘检测方法
[J].
An image edge detection method based on morphology and wavelet transform
[J].
融合小波变换和新形态学的含噪图像边缘检测
[J].
Edge detection for noisy image based on transform and new mathematical morphology
[J].
融合数学形态学滤波技术的边缘检测算法
[J].
Edge detection algorithm fused with mathematical morphology technology
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}