

高灵敏度柔性触觉传感器对介质层的变形能力要求高,介质层受压强时易产生弯曲变形的特点是提高传感器灵敏度的关键[20]. 为了提高触觉传感器的性能,通常在电极间引入聚二甲基硅氧烷(polydimethylsiloxane,PDMS)介质层. PDMS具有较低的弹性模量[21],同时具有优异的生物相容性和结构设计自由度,使其成为柔性触觉传感器合适的介质层材料. 电容式触觉传感器结构采用类三明治结构,由柔性上、下电极层和柔性介质层组成[22],其工作原理:施加在触觉传感器的外部压强引起介质层的变形,导致上下电极间距减小,介电常数增加,进而引起电容变化. 为了提高传感器的传感特性,并克服介质层材料的黏弹性行为引起的滞后问题,研究者在介质层引入金字塔、微穹顶、半球等不同微结构,或采用分层结构、高度可压缩的弹性模量材料[23]. Ruth等[24]开发的电容式压力传感器采用金字塔阵列作为介质层微结构,提升了传感器灵敏度. Wan等[25]设计的柔性电容式触觉传感器,通过仿生设计复制荷叶表面微图案作为介质层结构. Niu等[26]受表皮和真皮间互锁微脊的启发,提出互锁不对称的高灵敏电容式触觉传感器. Kim等[27]提出的电容式压力传感器利用多孔结构和锥形图案作为介质层微结构. 上述设计策略在一定程度上能够提升包括灵敏度在内的传感器性能,但电极层和微结构介质层间存在的气隙和较小的接触面积会导致2层间的滑移[28-29]. Luo等[30]开发的以倾斜微圆柱阵列作为介质层结构的电容式压力传感器,将微结构介质层和电极层集成为稳固的整体,有效消除了气隙和滑移对传感器性能的影响[31-32],提高了传感器的灵敏度和稳定性.
本研究提出分级倾斜微圆柱结构高灵敏度电容式柔性触觉传感器,与非分级倾斜微圆柱结构相比,在分级情况下,介质层受压强时更易产生弯曲变形和电极间距改变,可以满足不同应用对高灵敏度、快速响应的要求.利用有限元软件和实验分析传感器的结构特征(介质层形状、微圆柱直径与间距之比、短微圆柱高度、微圆柱倾斜角度)对其性能的影响规律.
1. 柔性触觉传感器的结构设计、工作原理与制备工艺
1.1. 柔性触觉传感器的结构设计
柔性触觉传感器由上下柔性电极、上下柔性衬底和柔性介质层组成. 如图1所示为柔性触觉传感器5×5分级倾斜微圆柱单元结构的组装集成示意图,介质层中的长微圆柱和短微圆柱交错分布、等距排列,微圆柱上下对称,其中长微圆柱间黏合紧密,短微圆柱间存在距离.
图 1
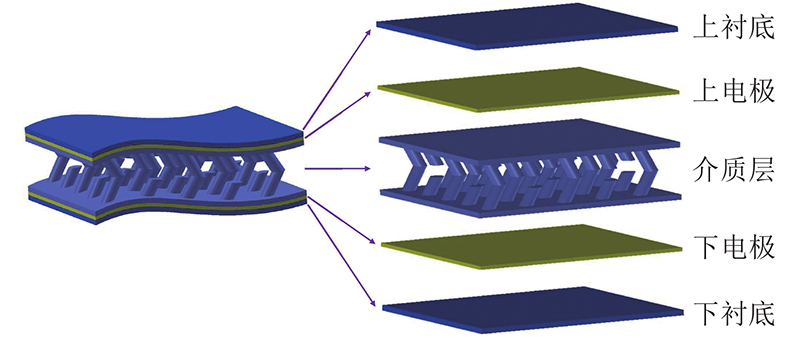
图 1 5×5分级倾斜微圆柱单元传感器结构和组成示意图
Fig.1 Schematic diagram of structure and composition of 5×5 hierarchical tilted micro-pillar structure unit sensor
1.2. 柔性触觉传感器的工作原理
采用不同压强加/卸载以评估电容式柔性触觉传感器的传感性能.通过结构的仿真设计,对比具有不同结构特征的触觉传感器样品,研究不同结构特征对传感器性能的影响.柔性触觉传感器的灵敏度S定义为
传感器的灵敏度可进一步表示为
式中:C、C0分别为传感器的实时电容和初始电容,
为了分析分级倾斜微圆柱结构触觉传感器的传感机理,采用有限元软件对传感器的微结构进行结构力学的模拟分析,选择二维5×5微圆柱单元模型,在模型顶面模拟压强的加载,同时在底面施加固定约束,采用von Mises应力理论分析传感器的应力分布情况,并观察传感器介质层中微圆柱的变形情况. 如图2所示,分别对垂直微圆柱、倾斜微圆柱、分级倾斜微圆柱结构传感器在相同压强下进行有限元仿真,对比平面内的应力σ、应变分布及变化情况. 分别模拟施加压强p=0、100、500 Pa,并将其作用于触觉传感器模型. 结果表明,基于垂直微圆柱结构介质层的传感器在压强作用下传感器的应变微小,难以改变电极间的间距和介电常数. 基于倾斜微圆柱结构介质层的传感器在压强作用下,介质层产生一定程度的弯曲变形,但整个结构的应变有限. 图2(c)中,应力主要集中在分级微圆柱的尖端,压强引起的应力分布相对均匀,受力开始时仅引起长微圆柱变形,随着压强增加,较短微圆柱相互接触后产生弯曲变形,微圆柱的变形难度增加,接触面处有明显的应力集中. 当施加的压强过大时,由于微结构的弯曲变形趋于饱和,分级倾斜微圆柱结构出现压缩变形,使得传感器的灵敏度降低. 分级倾斜微圆柱一旦与电极层形成牢固的黏连,倾斜微圆柱在弯曲时就能够承受快速增长的压强,表现为稳定的致密结构. 介质层微结构具有倾斜的微圆柱和较大的柱间间隙,显著改变了微结构的可压缩性,使触觉传感器的灵敏度显著提升. 通过上述应力分布情况分析,可以得出结论:1)受分级倾斜微圆柱变形能力限制,传感器灵敏度随着压强增加而缓慢下降;2)与其他微圆柱的介质层相比,分级倾斜微圆柱在提高灵敏度方面效果更显著. 在仿真的微结构中,分级倾斜微圆柱结构介质层变形最大. 因此,与垂直微圆柱、单层倾斜微圆柱结构相比,分级倾斜微圆柱结构更易引起电极间介电常数的增加和电极间距的减小,使得该结构的传感器具有更优异的传感性能.
图 2
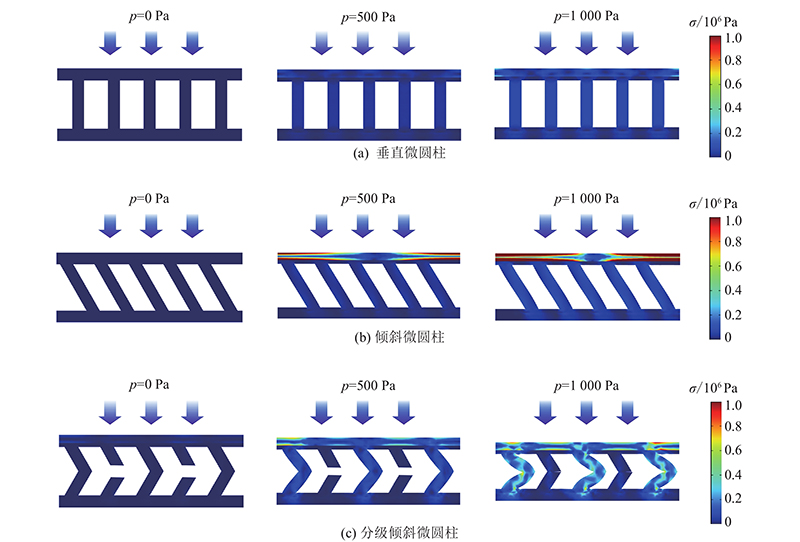
图 2 不同压强下不同微圆柱结构的应力分布模拟
Fig.2 Stress distribution simulation of different micro-pillar structures under different pressures
1.3. 柔性触觉传感器的制备工艺
电容式柔性触觉传感器的制备流程如图3所示.基于3D打印技术,利用3D打印机将(polylacticacid,PLA)材料制成分级倾斜微圆柱的介质层模具. 采用旋涂工艺,将PDMS均匀旋涂于凹陷的模具上. 待PDMS固化后剥离,形成结构完整的介质层. 在介质层表面均匀旋涂商用导电银胶作为柔性电极. 导电银胶预固化后,在电极表面再旋涂PDMS作为柔性衬底. 利用层层自组装工艺,将制成的结构以相反方向黏合,构成基于分级倾斜微圆柱结构的触觉传感器阵列.
图 3
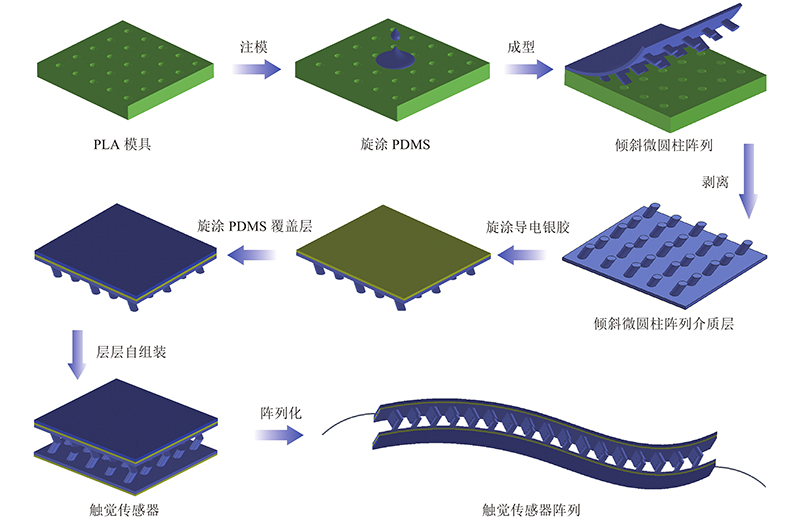
图 3 传感器阵列制备流程示意图
Fig.3 Schematic diagram of preparation process of sensor array
2. 柔性触觉传感器的特性及应用
2.1. 柔性触觉传感器的特性
传感器灵敏度受压强和结构特征的显著影响. 如图4所示,可以通过不同微结构、微圆柱直径a与间距b的比、短微圆柱高度h、微圆柱倾角β的设计和优化,获得最理想的传感器微结构特征来提高传感器的灵敏度. 图中,
图 4
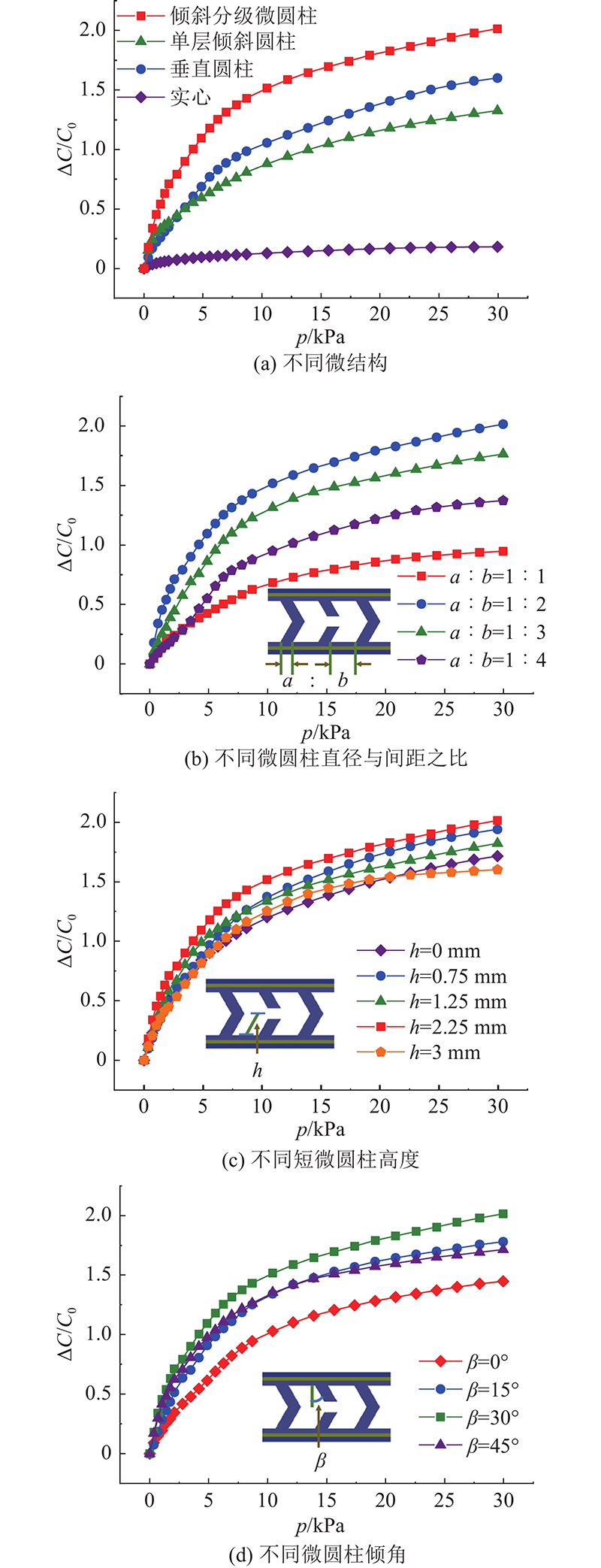
图 4 电容式触觉传感器的结构特征参数优化
Fig.4 Optimization of structural feature parameters of capacitive tactile sensor
通过上述对比实验可知,分级倾斜微圆柱结构的传感器在a∶b=1∶2、h=2.25 mm、β=30°时,触觉传感器表现出更优异的传感性能.
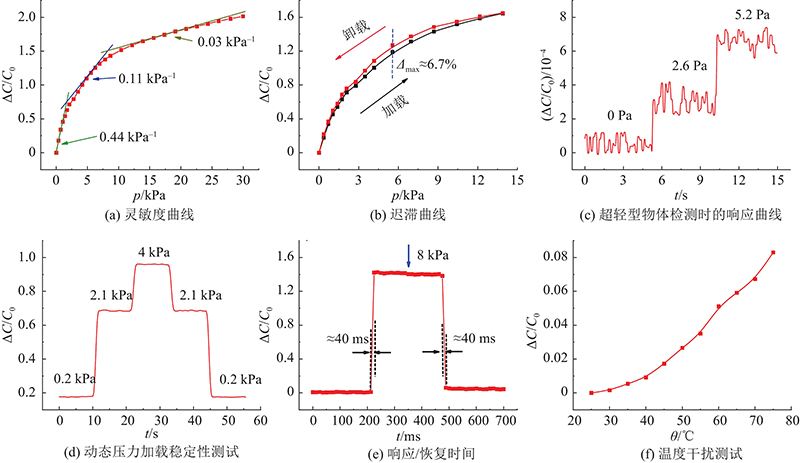
如图5所示为传感器的特性测试.图中,
图 5
触觉传感器的长期稳定性是实际应用场景中的重要参数,以频率为1 Hz、动态加/卸载压强为5 kPa来测试传感器的耐久性和重复性,如图6所示.相对电容变化曲线基本保持稳定,偏差可以忽略. 在重复循环次数n=2400次的情况下响应性能良好,表明传感器优异的稳定性和耐用性,在高精度、长期压力监测的实际场景中应用潜力突出.
图 6
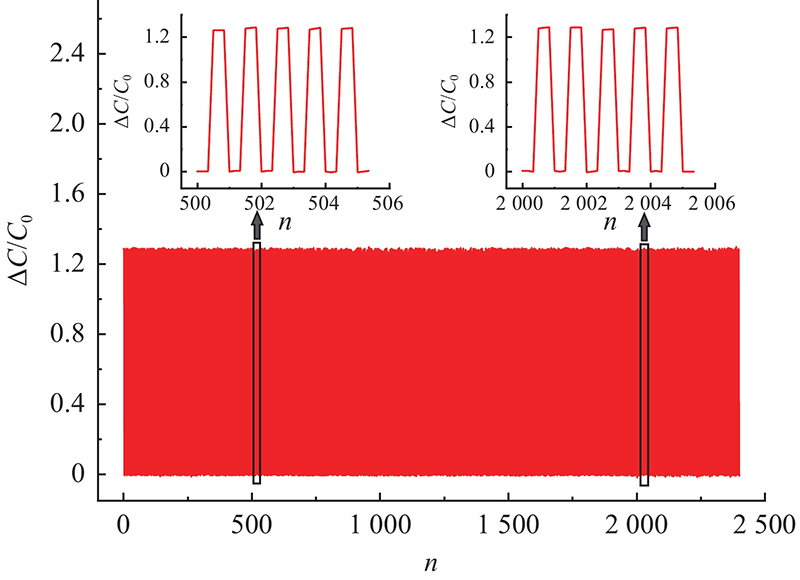
图 6 传感器在5 kPa压强加/卸载过程中的稳定性测试
Fig.6 Stability test of sensor during 5 kPa pressure loading/unloading
图 7

图 7 电容式柔性触觉传感器性能对比
Fig.7 Capacitive flexible tactile sensor performance comparison
2.2. 柔性触觉传感器的应用
电容式柔性触觉传感器典型应用场景为高灵敏度、精准机器人触觉感知. 将制备的触觉传感器安装在机械手上,采用机械手抓取不同硬度的物体,以评估该柔性触觉传感器在实际应用中的触觉感知能力. 如图8所示为机械手分别抓取桃子、李子、乒乓球等物体时传感器的相对电容变化曲线. 机械手执行抓取动作时,先保持放松状态约0.5 s,再握住物体并保持约1 s,重复3次,以获取相对可靠的数据. 相对电容信号响应和恢复过程如图中虚线标注所示,分别代表机械手在抓取过程中的弯曲和张开状态,不同的信号变化高度表示抓握期间机械手受力情况. 桃子重量较轻、较易变形,因此机械手在抓取过程中受到的力逐渐增加. 李子属于中等柔软度的水果,机械手在抓取过程中受到的力依次增加. 相较于桃子、李子,乒乓球表面硬度明显增加,机械手受力后较难变形,因此机械手在抓取过程中,传感器的电容信号变化最为显著. 结果表明,本研究所提传感器具有高灵敏度、快速响应特性以及良好的动态响应特性.
图 8
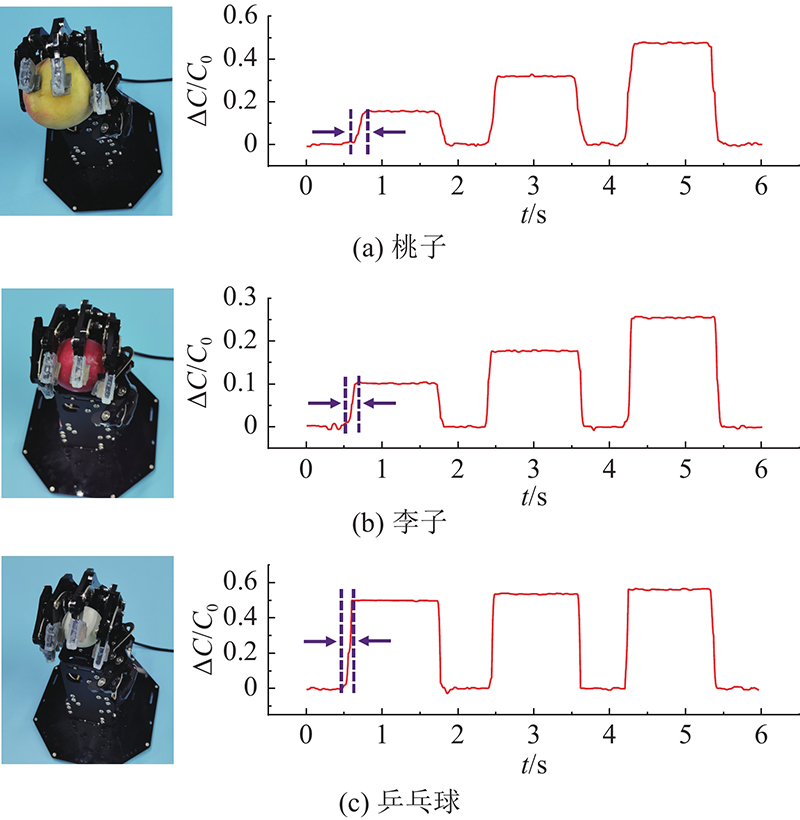
图 8 机械手抓取不同硬度物体时的响应信号曲线
Fig.8 Response signal curve when manipulator grasps objects with different hardness
电容式柔性触觉传感器在实际应用中的重要需求之一是压强分布的感知能力. 采用交叉电极阵列的方式集成化设计触觉传感器,每个交叉电极间的介质层构成传感器单元,简化了传感器阵列的制作过程. 微结构化的介质层中均匀排列着微圆柱,每个传感器单元具有可重复的可压缩特性,确保每个单元在压强分布感知过程中的一致性. 如图9所示为8×8传感器阵列的压强分布感知实验. 将不同形状的物体置于传感器表面以测试传感器阵列的压强分布感知性能. 图9(d)中,将铅笔放置在传感器阵列上,采用LabVIEW实时采集传感器的信号,电脑界面上的响应信号图像准确地反映了每个单元上感知压强,以有效区分不同空间上的压强分布差异。可知,传感器具有实时感知压强分布的能力. 结合图9(e),将T型模具放置在传感器阵列上,响应信号图像清晰描绘出压强分布图像,输出信号值与物体的形状相匹配. 结果表明,本研究所提传感器具备与人体皮肤类似的感知外部压强分布的功能.
图 9
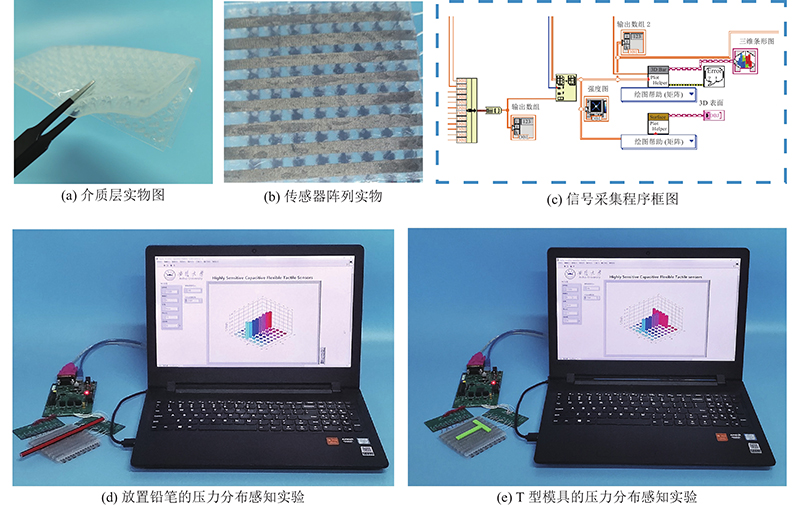
图 9 8×8传感器阵列的压力分布感知实验
Fig.9 Experiment of pressure distribution sensing with 8×8 sensor array
人机交互可以补充视觉和听觉的信息,通过可穿戴传感器系统实现,并且在人工智能中起着至关重要的作用. 基于柔性触觉传感器的人机交互界面将传感器集成于机械手的5个手指,用手指轻触传感器完成触觉力的反馈,以识别受压时每个手指上的压强. 使用硬件电路和软件系统的组合来验证传感器的有效性,并设计计算机的数据采集和由移动电源供电的处理电路. 上层计算机的设计软件为LabVIEW,使用AD7147-1 CDC电路传输模块将处理的数据发送到PC端的接收模块,以便在上层计算机界面实时显示数据. 如图10所示,用手指依次轻触机械手上固定的5个传感器,波形清晰地显示出每个手指对应电容变化. 结果表明,传感器波形表现良好,电容响应曲线可以确定不同手指上的压强幅度,为人机交互提供高效、新颖和低成本的解决方案. 触觉传感器在人机界面中表现出足够的潜力,在智能机器人触摸领域甚至工业制造中显示出潜在的应用前景.
图 10
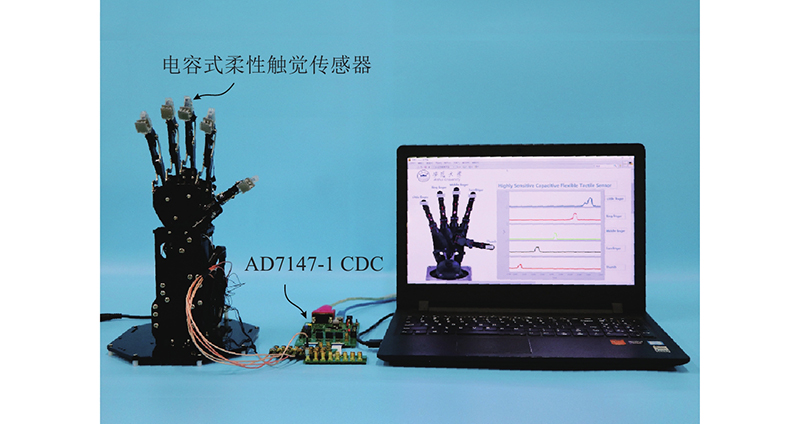
图 10 机械手集成传感器触摸实验
Fig.10 Finger touch manipulator integrated sensor experiment
如图11(a)所示,将本研究提出的柔性触觉传感器作为可穿戴设备,监测人体的不同部位感知在不同运动姿态作用下的压强信号, 图11(b)中,将传感器安装在志愿者的手臂上,随着肌肉收缩舒张程度的变化,给传感器施加的压强也随之变化,上述变化通过电容信号的形式记录. 进一步,相对电容信号随着手紧握程度引起的肌肉收缩程度的不同而改变,当进行重复动作时传感器信号基本保持不变. 图11(c)中,将传感器安装在志愿者的膝盖部位,当重复弯曲动作时,响应信号的波形重复性良好. 结果展现了传感器在人体运动姿态方面的潜在应用. 图11(d)中,将传感器安装在志愿者的上臂部位,分别用指尖、关节和拳头以相同力度的动作击打传感器,观察信号波形变化. 当用指尖轻击传感器时,相对电容变化值较小;当用拳头撞击时,由于拳头施力较大,记录到的相对电容变化较大. 图11(e)中,曲线呈现稳定的重复波形,表明该触觉传感器不仅可用于人体动作监测,还可用于运动计步器场景. 图11(f)中,当志愿者处于正常跑步状态时,可以观察到稳定的周期性波形信号;当志愿者处于失衡跑步状态时,传感器记录到的波形信号是无序的. 值得注意的是,与正常跑步状态相比,失衡状态下传感器响应信号强度略低,表明不同运动姿态下脚底的不同压强分布. 该实验结果表明,传感器在宽量程压强范围检测在如人体运动姿态监测和医疗监测中的应用潜力.
图 11
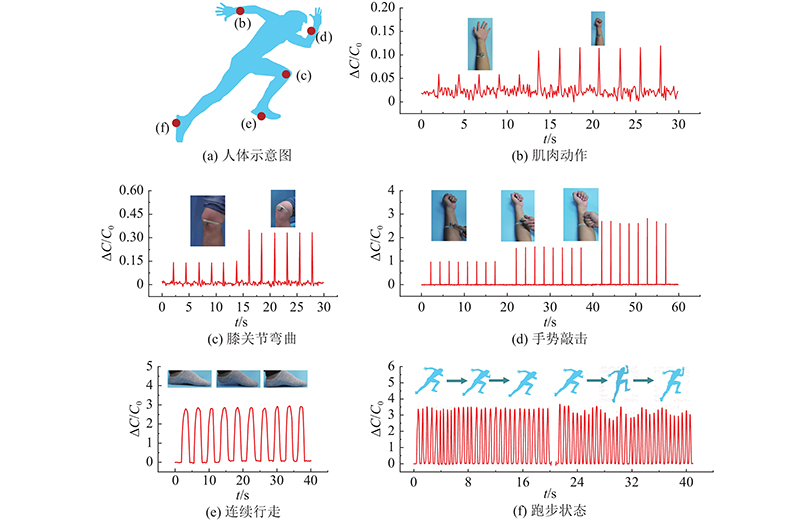
图 11 本研究传感器在人体不同运动姿态监测中的应用
Fig.11 Sensors used in various monitoring applications of different human motion states with proposed sensor
3. 结 语
本研究提出分级倾斜微圆柱结构的柔性电容式触觉传感器. 分级倾斜微圆柱的介质层与电极层的紧密结合,不仅消除了滑移和间隙对电容值的不确定性,也使传感器结构更为稳固. 分级倾斜微圆柱阵列在压强作用下更容易产生弯曲变形,使得电极层间的距离和介电常数在极小的压强作用下更容易改变,显著提升了传感器的灵敏度. 该传感器的制备方案简单、低成本,摒弃了复杂的制造工艺,测试结果表明传感器的静态特性和动态特性良好,具有高灵敏度、高稳定性和可靠性. 传感器在低压强范围的灵敏度为0.44 kPa−1,检测下限为2.6 Pa,响应时间约为40 ms,最大迟滞误差为6.7%,工作线性范围宽. 在循环的加/卸载压强作用下,传感器具有良好的重复性和耐久性,实现机械手精准感知和人体不同运动姿态监测. 如何继续提升传感器灵敏度性能以适应更复杂的应用场景,并进一步缩小尺寸参数,将在接下来的研究工作中开展.
参考文献
Highly sensitive and flexible tactile sensor with truncated pyramid-shaped porous graphene/silicone rubber composites for human motion detection
[J].DOI:10.1016/j.compscitech.2021.109078 [本文引用: 1]
A bio-inspired cilia array as the dielectric layer for flexible capacitive pressure sensors with high sensitivity and a broad detection range
[J].
Synergistic optimization toward the sensitivity and linearity of flexible pressure sensor via double conductive layer and porous microdome array
[J].DOI:10.1021/acsami.0c08910 [本文引用: 1]
Three-dimensional printed ultrahighly sensitive bioinspired ionic skin based on submicrometer-scale structures by polymerization shrinkage
[J].DOI:10.1021/acs.chemmater.0c04581 [本文引用: 1]
A skin-like sensor for intelligent braille recognition
[J].
Ultrahigh sensitivity flexible pressure sensors based on 3D-printed hollow microstructures for electronic skins
[J].DOI:10.1002/admt.202000984 [本文引用: 1]
Bioinspired, multifunctional dual-mode pressure sensors as electronic skin for decoding complex loading processes and human motions
[J].DOI:10.1016/j.nanoen.2020.105337 [本文引用: 1]
Highly sensitive interlocked piezoresistive sensors based on ultrathin ordered nanocone array films and their sensitivity simulation
[J].DOI:10.1021/acsami.0c16456 [本文引用: 1]
Ultra-wide range pressure sensor based on a microstructured conductive nanocomposite for wearable workout monitoring
[J].DOI:10.1002/adhm.202001461 [本文引用: 1]
A bioinspired hydrogen bond-triggered ultrasensitive ionic mechanoreceptor skin
[J].DOI:10.1038/s41467-019-11973-5 [本文引用: 2]
Bioinspired flexible volatile organic compounds sensor based on dynamic surface wrinkling with dual-signal response
[J].DOI:10.1002/smll.201900216 [本文引用: 1]
3D dielectric layer enabled highly sensitive capacitive pressure sensors for wearable electronics
[J].DOI:10.1021/acsami.0c09893 [本文引用: 1]
A flexible, ultra-highly sensitive and stable capacitive pressure sensor with convex microarrays for motion and health monitoring
[J].DOI:10.1016/j.nanoen.2019.104436 [本文引用: 1]
3D printing of highly sensitive and large-measurement-range flexible pressure sensors with a positive piezoresistive effect
[J].DOI:10.1021/acsami.0c06977 [本文引用: 1]
An all silk-derived dual-mode E-skin for simultaneous temperature-pressure detection
[J].
Boosting piezoelectric and triboelectric effects of PVDF nanofiber through carbon-coated piezoelectric nanoparticles for highly sensitive wearable sensors
[J].
Hydrophobic and stable MXene-polymer pressure sensors for wearable electronics
[J].DOI:10.1021/acsami.0c00255 [本文引用: 1]
Recent progress in tactile sensors and their applications in intelligent systems
[J].DOI:10.1016/j.scib.2019.10.021 [本文引用: 1]
Microengineering pressure sensor active layers for improved performance
[J].DOI:10.1002/adfm.202003491 [本文引用: 1]
Fabrication of hierarchically porous structured PDMS composites and their application as a flexible capacitive pressure sensor
[J].DOI:10.1016/j.compositesb.2021.108607 [本文引用: 1]
Recent progress in flexible microstructural pressure sensors toward human-machine interaction and healthcare applications
[J].DOI:10.1002/smtd.202001041 [本文引用: 1]
Highly sensitive and flexible capacitive pressure sensor enhanced by weaving of pyramidal concavities staggered in honeycomb matrix
[J].DOI:10.1109/JSEN.2020.3008474 [本文引用: 1]
Rational design of capacitive pressure sensors based on pyramidal microstructures for specialized monitoring of biosignals
[J].
A highly sensitive flexible capacitive tactile sensor with sparse and high-aspect-ratio microstructures
[J].DOI:10.1002/aelm.201700586 [本文引用: 1]
Highly morphology-controllable and highly sensitive capacitive tactile sensor based on epidermis-dermis-inspired interlocked asymmetric-nanocone arrays for detection of tiny pressure
[J].DOI:10.1002/smll.201904774 [本文引用: 1]
Simple fabrication of highly sensitive capacitive pressure sensors using a porous dielectric layer with cone-shaped patterns
[J].
A highly sensitive capacitive-based soft pressure sensor based on a conductive fabric and a microporous dielectric layer
[J].DOI:10.1002/admt.201700237 [本文引用: 1]
Transparent, flexible, conformal capacitive pressure sensors with nanoparticles
[J].DOI:10.1002/smll.201703432 [本文引用: 1]
Flexible capacitive pressure sensor enhanced by tilted micropillar arrays
[J].DOI:10.1021/acsami.9b03718 [本文引用: 2]
Flexible, transparent, sensitive, and crosstalk-free capacitive tactile sensor array based on graphene electrodes and air dielectric
[J].
Large area one-step facile processing of microstructured elastomeric dielectric film for high sensitivity and durable sensing over wide pressure range
[J].DOI:10.1021/acsami.6b05177 [本文引用: 1]
Anodized aluminum oxide-assisted low-cost flexible capacitive pressure sensors based on double-sided nanopillars by a facile fabrication method
[J].DOI:10.1021/acsami.9b17966 [本文引用: 1]
A flexible and highly sensitive capacitive pressure sensor based on conductive fibers with a microporous dielectric for wearable electronics
[J].
Plant-based biodegradable capacitive tactile pressure sensor using flexible and transparent leaf skeletons as electrodes and flower petal as dielectric layer
[J].
A facile strategy for low young's modulus PDMS microbeads enhanced flexible capacitive pressure sensors
[J].
Soft wearable pressure sensors for beat-to-beat blood pressure monitoring
[J].
A flexible capacitive pressure sensor for wearable respiration monitoring system
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}