

机场道面在长期服役过程中会产生差异沉降和破损,影响飞机乘坐舒适性及驾驶安全. 建立合适的道面平整度评价标准,对飞机安全运营、动力响应分析都有重要意义.
现有跑道平整度评价标准可分成3类. 1)经验法,以直尺评价法为代表,即规定直尺下跑道的间隙. 如我国采用3 m直尺下跑道最大间隙平均值、最大间隙大于5 mm所占百分比对道面进行分级[1];国际民航组织规定新建跑道3 m直尺间隙值上限为3 mm、一般跑道45 m直尺下间隙值上限为30 mm[2];美国联邦航空管理局要求新建跑道5 m直尺间隙值上限为6 mm[3]. 这类方法应用方便、设备简单,但缺乏明确的理论依据,也不能反映飞机移动速度、道面变形模式和波长等不同因素的影响[4]. 2)试验法,以波音公司提出的波音平整度指数(Boeing bump index, BBI)[5]为代表. 王广德等[6]通过浦东机场一、二跑道和云南文山机场跑道不同区域飞行员舒适度感觉,将跑道的差异沉降分为安全区、预警区和危险区也可以归属于试验法. 该类方法考虑跑道变形波长和幅值的影响,但试验成本较高,且根据特殊机型得到的结果也很难推广至其他机型[7]. 3)理论分析法,以国际平整度指数(international roughness index, IRI)为代表. 该方法将车辆理想化为由弹簧、质量块和阻尼组成的1/4车模型,按80 km/h的速度在已知断面上行驶并计算系统的累积相对位移作为IRI,将运行速度、路面平整程度和车辆振动结合起来,是目前国际上运用较广泛的平整度评价方法[8]. 上述的1/4车模型被发展为更贴近真实飞机系统的多自由度模型,也有较为成熟的商业软件可以进行滑跑数值仿真,如 Gerardi等[9-12]利用ADAMS分析飞机振动响应. 越来越多的学者致力于对比分析这3类平整度评价标准,以期找到不同评价体系的内在联系和各自的适用条件,如程国勇等[4,10,13-14]. 但这些研究通常将给定的道面断面轮廓线作为机轮的位移,一旦飞机滑跑过程中与道面有脱开的趋势,道面会对机轮施加向下的拉力,将机轮“拉”回地面,这与实际情况严重不符. Žuraulis等[15]动态测试汽车行驶的数据表明,车速为80 km/h时,车轮脱离地面时间占比提升至6.93%. 飞机的滑跑速度远高于汽车,以B737-800型飞机为例,起飞时速度可达290 km/h,滑跑中同样可能出现机轮脱离道面的情况. 考虑道面对机轮单向约束作用才能更合理地分析飞机在滑跑过程中的动力响应,对道面平整度进行客观评价.
本文以B737-800型飞机为例,考虑道面对机轮的单向约束,建立飞机滑跑六自由度分析模型,提出2种思路求解变刚度矩阵的动力方程;分析在单个不平整激励输入下,不同道面变形模式、波长、幅值和飞机滑跑速度的飞机动力响应变化规律;模拟不同平整度随机道面上飞机滑跑过程,分析飞机动力和频响特性,评估考虑道面单向约束作用产生的对机体质心最大加速度和加权加速度均方根值的影响,为修订机场跑道平整度评价标准提供依据.
1. 计算模型
1.1. 考虑道面单向约束的飞机模型
如图1所示,B737-800机型为中短程窄体客机,在国内航线使用广泛. 以B737-800型飞机为例,根据机轮分布,建立飞机六自由度模型如图2所示. 图中,Z0为质心竖向位移,Z1、Z2、Z3分别为3组起落架机轮轮轴竖向位移,Z4、Z5、Z6分别为3组起落架与机身连接处竖向位移,h1、h2、h3分别为3组起落架机轮下方道面的纵断面高程,θX、θY分别为机身绕X轴的滚转位移、机身绕Y轴的俯仰位移,其他各参数释义如表1所示. 表中参数取值参考文献[16]。由图、表可知,6个自由度分别为3组起落架及机体沿Z轴的垂直自由度,机体绕X轴的俯仰自由度和绕Y轴的横向滚转自由度. 假定:1)机身为刚体且质量集中在机身质心,起落架及机轮质量集中在机轮轮心;2)起落架简化为弹簧和线性阻尼;3)机轮简化为弹簧且与道面点接触;4)气动升力作用于机体质心,滑跑过程中迎角变化很小,俯仰位移约为10−5~10−3,因此忽略升力系数随迎角的变化;5)假定飞机匀速滑跑,不考虑飞机水平方向的受力和变形;6)忽略飞机滑跑过程中道面的振动和二次变形.
图 1

图 2
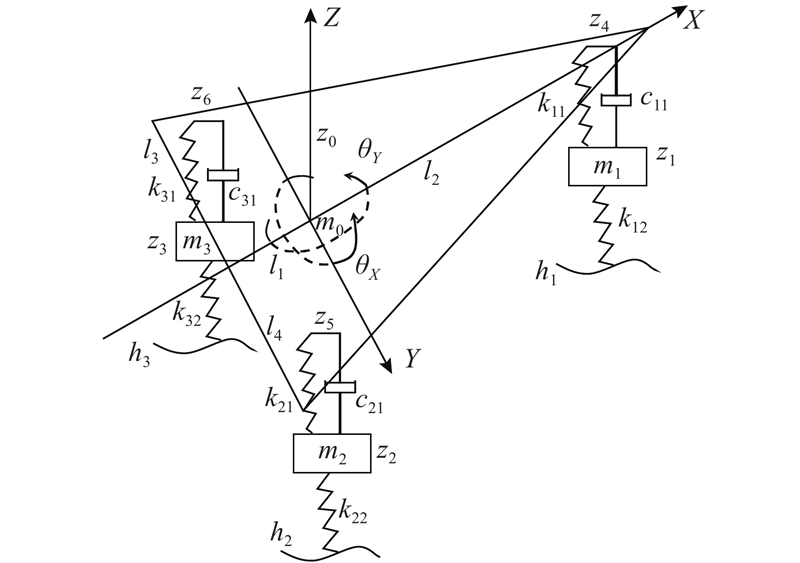
表 1 B737-800型飞机的模型计算参数
Tab.1
| 参数 | 符号 | 单位 | 数值 |
| 机身质量 | m0 | kg | 73 500 |
| 前起落架(含机轮)质量 | m1 | kg | 256 |
| 主起落架(含机轮)质量 | m2、m3 | kg | 1 146 |
| 机体绕质心俯仰转动惯量 | IY | kg·m2 | 3 660 000 |
| 机体绕质心横滚转动惯量 | IX | kg·m2 | 2 610 000 |
| 前起落架悬架刚度系数 | k11 | N/m | 950 000 |
| 主起落架悬架刚度系数 | k21、k31 | N/m | 2 760 000 |
| 前起落架轮胎刚度系数 | k12 | N/m | 1780 000 |
| 主起落架轮胎刚度系数 | k22、k32 | N/m | 12 800 000 |
| 前起落架悬架阻尼系数 | C11 | N·s/m | 18 100 |
| 主起落架悬架阻尼系数 | C21、C31 | N·s/m | 108 000 |
| 主起落架连线与对称轴 的交点到质心的距离 | l1 | m | 1.15 |
| 前起落架与质心的距离 | l2 | m | 14.45 |
| 主起落架到对称轴的距离 | l3、l4 | m | 2.86 |
| 驾驶舱与质心的距离 | l5 | m | 16.05 |
| 翼展面积 | w | m2 | 124.60 |
| 升力系数 | C1 | / | 1.36 |
| 空气密度 | ρ | kg/m3 | 1.293 |
考虑道面对机轮的单向约束,即道面只限制机轮向下位移,不限制其向上位移,当机轮脱离道面时,道面对机轮无约束作用,定义机轮轮轴竖向位移z与道面纵断面高程h的关系为
式中:
式中:Ki、C、M、FiX、z分别为飞机滑跑过程中刚度矩阵、阻尼矩阵、质量矩阵、力矩阵、位移矩阵. 对如图2所示的六自由度模型,有:
式中:L为飞机滑跑过程中的升力,与飞机速度平方成正比
表 2 不同机轮−道面接触形式下Ki与FiX中相关元素组合
Tab.2
| 工况 | 机轮与道面接触形式 | K(2,2) | K(3,3) | K(4,4) | F(2,1) | F(3,1) | F(4,1) |
| 1 | 三组起落架机轮全着地 | K11+K12 | K21+K22 | K31+K32 | −m1g+K12h1(x) | −m2g+K22h2(x) | m3g+K32h3(x) |
| 2 | 前起落架机轮着地,两主起落架机轮离地 | K11+K12 | K21 | K31 | −m1g+K12h1(x) | −m2g | −m3g |
| 3 | 前起落架机轮离地,主起落架机轮着地 | K11 | K21+K22 | K31+K32 | −m1g | −m2g+K22h2(x) | m3g+K32h3(x) |
| 4 | 前起落架和右主起落架机轮着地,左主起落架机轮离地 | K11+K12 | K21+K22 | K31 | −m1g+K12h1(x) | −m2g+K22h2(x) | −m3g |
| 5 | 前起落架和左主起落架机轮着地,右主起落架机轮离地 | K11+K12 | K21 | K31+K32 | −m1g+K12h1(x) | −m2g | m3g+K32h3(x) |
| 6 | 三组起落架机轮全离地 | K11 | K21 | K31 | −m1g | −m2g | −m3g |
1.2. 道面激励
机场道面在长期服役过程中产生的单个沉降或隆起可近似采用半波正弦表示[19]:
式中:“+”表示道面隆起,“−”表示沉降;x0为产生沉降或隆起的起始位置;λ、A分别为沉降或隆起段的波长、幅值.
跑道纵断面的高程可视为零均值的平稳高斯随机过程,将一系列相位随机的正弦波进行叠加模拟道面轮廓[20]:
式中:将n1~n2的空间频率划分成N个宽度为Δn的区间,第i个区间的中心频率为nmid-i,Gq(n)为道面功率谱密度,
跑道上单个沉降或隆起对机体振动的影响可采用式(9)模拟道面变形输入,道面随机不平整激励可采用式(10)模拟飞机全滑跑过程的道面输入.
1.3. 计算方法
采用Newmark-β法分步计算飞机的动力响应. 由于在飞机滑跑过程中,Ki与FiX不断变化,zt+Δt由Ki t+Δt、zt、
2. 单个不平整激励下考虑道面单向约束的飞机动力响应
2.1. 对位移响应的影响
机场道面的变形分沉降和隆起2种模式. 考虑最简单的道面激励输入,即3组起落架下方道面轮廓相同、道面产生变形的起始位置相同、仅存在式(1)表示的单个沉降或隆起. 取A=0.05 m、λ=20 m,该变形幅在王广德等[6]实测浦东机场一、二跑道给出的单一波峰或波谷跑道工后差异沉降的上限6 cm(20 m范围)之内,也在BBI可接受区内.
模拟飞机以80 m/s的速度在该道面上滑跑,对比在沉降或隆起变形模式下机体的振动响应. 如图3所示为飞机经过单个隆起时,道面轮廓线与质心位移、主起落架机轮位移之间的关系. 在0时刻,机轮和起落架因自重产生一定的压缩变形,机轮与飞机质心初始位移都不为零,道面与主起落架机轮的位移差1.6 mm为机轮压缩量,主起落架机轮与质心位移差3.1 mm为起落架压缩量,远小于机轮经过隆起段时产生的振动位移. 如图4所示为当道面沉降变形时,是否考虑道面单向约束作用得到的主起落架机轮位移曲线. 由图可知考虑道面单向约束作用,机轮在进入沉降变形下降段后迅速与道面脱离,并在抬升段后期重新落回道面,与不考虑单向约束作用的机轮贴合道面轮廓运动完全不同. 如图5所示为道面变形为隆起时的情况。由图可知,机轮在进入隆起变形的上升段时与道面贴合,考虑道面单向约束作用与不考虑时的位移曲线完全一致;在进入隆起变形的下降段后,机体因惯性作用持续向上位移,随后通过起落架拉起机轮,机轮短暂下降释放起落架压缩量后,随机体一起上升腾空脱离道面(图3),在空中达到最大位移后下落并冲击道面,飞机机轮腾空距离远超道面变形长度.
图 3
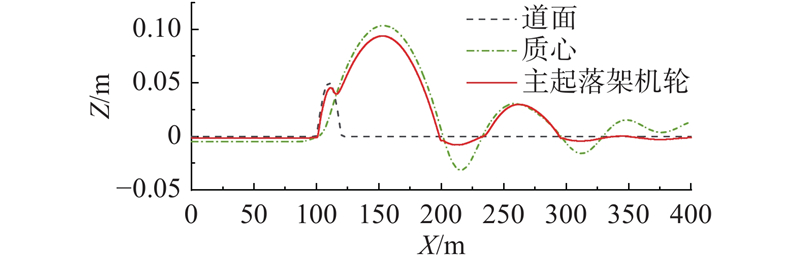
图 3 单个隆起变形模式下道面、质心和主起落架机轮的位移曲线
Fig.3 Displacement curve of pavement, center of mass and main landing gear wheel with single uplift deformation mode
图 4
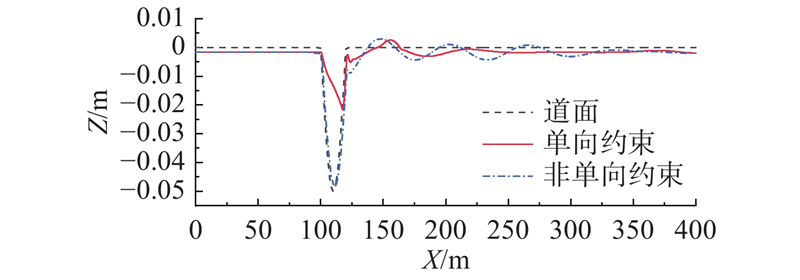
图 4 沉降变形模式下主起落架机轮位移曲线
Fig.4 Displacement curve of main landing gear wheel with subsidence deformation mode
图 5
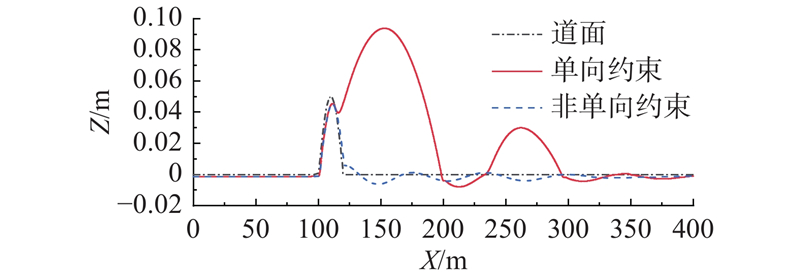
图 5 隆起变形模式下主起落架机轮位移曲线
Fig.5 Displacement curve of main landing gear wheel with uplift deformation mode
2.2. 对加速度响应的影响
2.2.1. 一般规律
如图6所示为未考虑单向约束时机体质心竖向加速度时程曲线,道面沉降和隆起激励对位移响应的影响一致,沉降段与隆起段轮廓对称. 由图可知,不考虑单向约束,飞机经过沉降和隆起段产生的机体加速度响应反对称,道面变形模式对机体振动响应形式和程度没有影响,这与考虑道面单向约束作用时完全不同. 如图7所示为考虑单向约束时机体质心竖向加速时程曲线. 机轮受力非对称,即道面对机轮只有压力没有拉力,与位移类似,机体的加速度响应不对称. 结合机轮位移曲线可以发现,除机轮脱离地面前的短暂重合外,一旦机轮脱离地面,飞机仅受到自重和升力作用,质心加速度近似保持
图 6
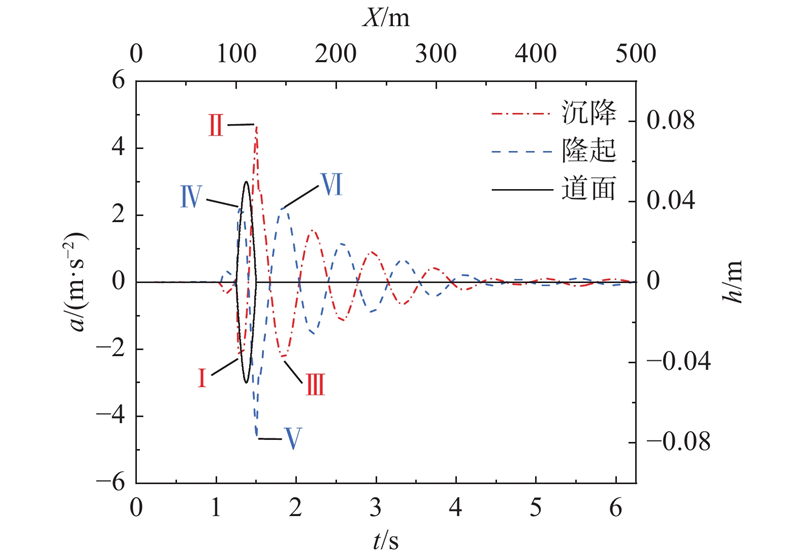
图 6 未考虑单向约束时机体质心竖向加速度时程曲线
Fig.6 Vertical acceleration-time curve of aircraft′s center of mass under different unevenness modes without considering unilateral constraints
图 7
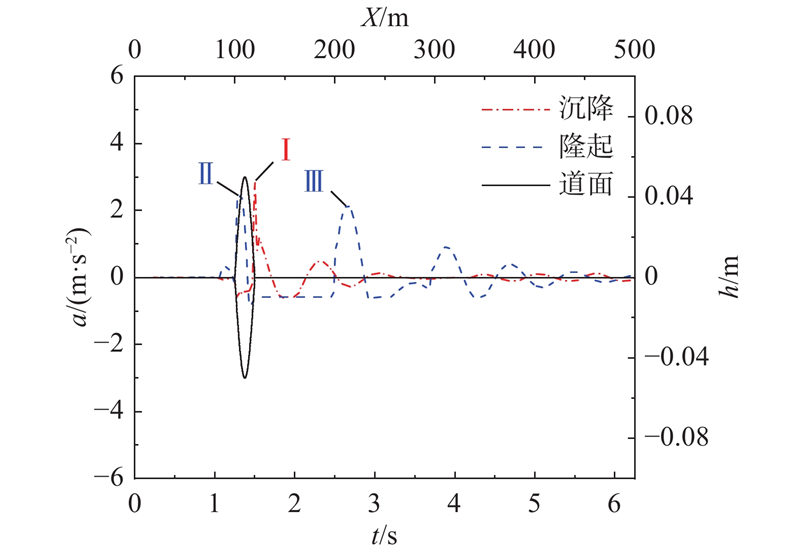
图 7 考虑单向约束时机体质心竖向加速度时程曲线
Fig.7 Vertical acceleration-time curve of aircraft′s center of mass under different unevenness modes with considering unilateral constraints
可见,在考虑道面对机轮的单向约束作用后,机轮脱离道面时间、再次撞击道面的作用点和作用力与不考虑该因素时完全不同,具有道面变形模式依赖性,形成颇为复杂的飞机动力响应.
2.2.2. 对峰值的影响
如图8、9所示分别为飞机在长波长的沉降和隆起激励下(A=0.05 m、λ=100 m,v=80 m/s)滑行时,机轮竖向位移和质心竖向加速度时程曲线. 机体正向加速度响应峰值均较不考虑单向约束时的计算结果有所提高. 图8中,当沉降变形时,考虑道面单向约束后,机轮在下降段与道面脱开,因沉降段长度较长,机轮与道面重新接触的落点仍在下降段,随后机轮与起落架进一步压缩,机体质心竖向加速度达到峰值,为未考虑单向约束时的峰值的1.29倍. 图9中,当隆起变形时,考虑道面单向约束作用后,在变形上升段,机体因惯性作用而机轮腾空,由于隆起段长度较长而机轮与道面撞击点出现在下降段,最大加速度峰值比不考虑单向约束时放大为1.09倍. 可见,单个不平整激励下,道面单向约束作用对机体振动响应是放大还是削弱,不仅与道面变形模式有关,还与变形的波长有关. 通过多组不同工况组合下的算例总结,一般表现为削弱飞机负向振动响应;道面隆起时,增大正向振动响应;道面沉降且波长较小、幅值较大,削弱飞机正向振动响应,波长较大、幅值较小时,增强正向振动响应.
图 8
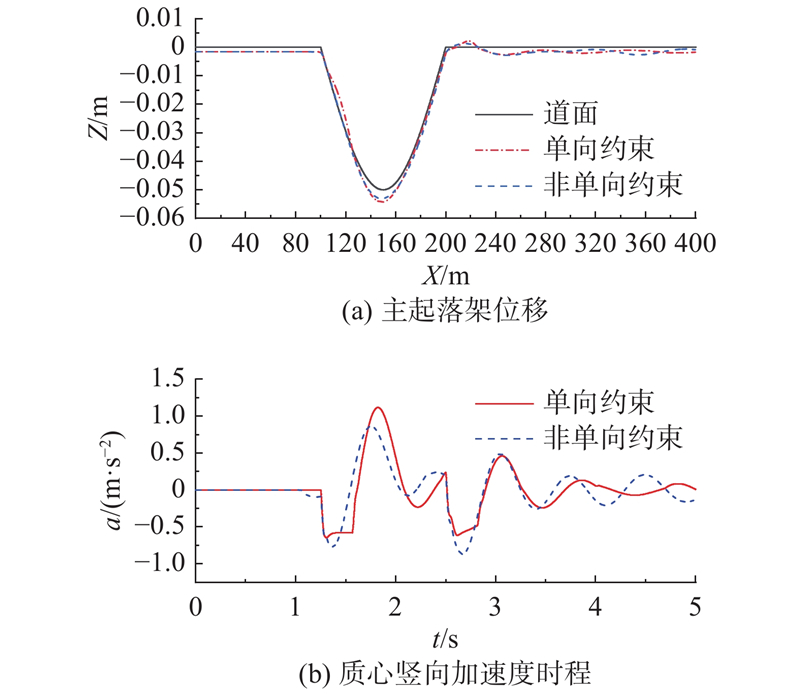
图 8 长波长、沉降变形模式下主起落架机轮位移曲线及质心竖向加速度时程曲线
Fig.8 Displacement curve of main landing gear wheel and vertical acceleration-time curve of aircraft’s center of mass with long wavelength, subsidence deformation mode
图 9
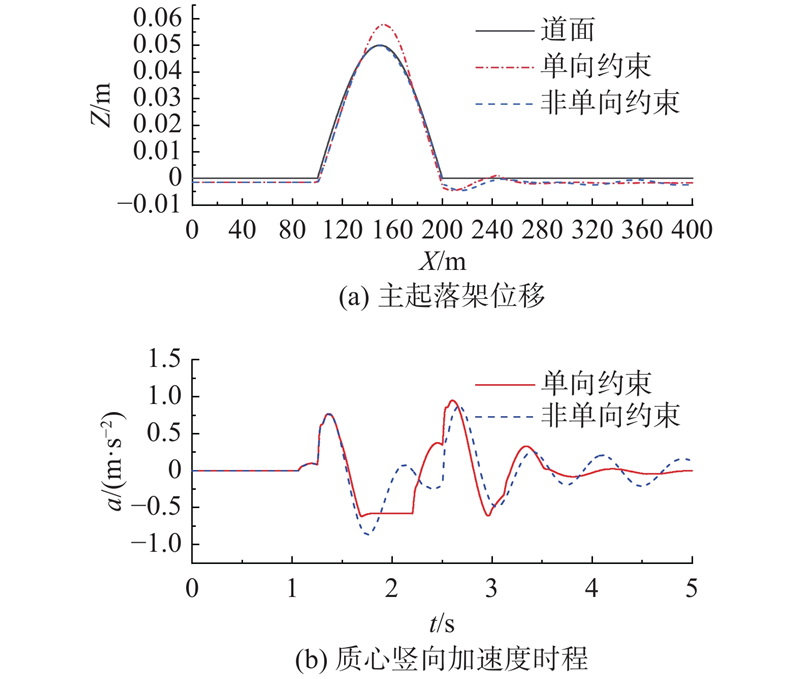
图 9 长波长、隆起变形模式下主起落架机轮位移曲线及质心竖向加速度时程曲线
Fig.9 Displacement curve of main landing gear wheel and vertical acceleration-time curve of aircraft’s center of mass with long wavelength, uplift deformation mode
2.3. 振动响应的影响因素和变化规律
本文主要考察的影响因素有道面变形模式、波长、幅值和飞机滑跑速度. 不考虑道面的单向约束作用时,飞机质心加速度响应与道面变形模式无关,与其他影响因素间单调相关,即滑跑速度越快、道面变形幅值越大,波长越短,振动响应越大[19]. 考虑单向约束后,这些因素与飞机质心加速度响应不再单调相关,响应规律变得更复杂.
为了分析考虑道面单向约束后飞机动力响应随各影响因素的变化规律,本文仿照凌建明等[8]的方法,按道面隆起、沉降变形模式,设计3类仿真场景:1)控制滑行速度v=10、80 m/s,计算飞机质心竖向最大加速度amax随道面变形幅值A=0.01~0.2 m的变化规律,其中A的仿真步长为0.01 m;2)控制A=0.05 m,计算amax随λ=2~100 m的变化规律,其中λ的仿真步长在λ<10 m时为2 m,在λ≥10 m时为10 m;3)控制A=0.05 m,计算amax随v=10~80 m范围内的变化规律,其中v的仿真步长为5 m/s.
图 10
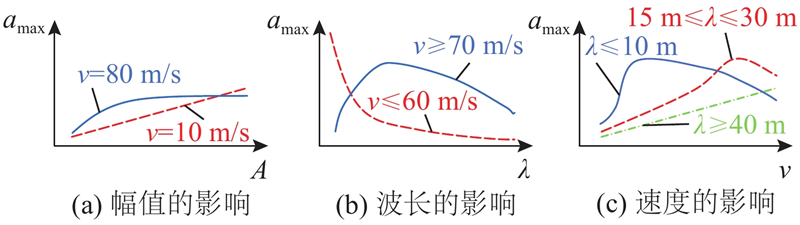
图 10 道面沉降变形多因素耦合作用下amax变化规律
Fig.10 Variation of amax under multi-factor coupling with settlement pavement
图 11
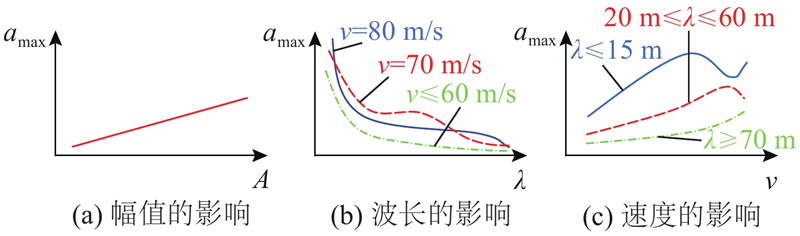
图 11 道面隆起变形多因素耦合作用下amax变化规律
Fig.11 Variation of amax under multi-factor coupling with uplifted pavement
在飞机滑跑速度较慢、不平整段长度较长、幅值较小时,无论道面变形模式为沉降或隆起,加速度响应随各影响因素的变化是单调的. 原因是对应的振动响应幅值较小,机轮与道面贴合程度好,与不考虑道面单向约束的计算结果一致.
当出现机轮脱开现象时,计算结果明显具有道面变形模式相关性的特点. 道面沉降变形时,机轮在高速、短波长和大幅值的情况下会腾空飞越过沉降段的底部,机轮落点与水平面的高度差与速度和平整段长度有关而与幅值无关,高度差决定机体振动响应程度,此时幅值进一步增大对飞机振动响应影响不大;速度增大和波长减小会导致机轮下落高度变小,使得飞机振动响应减小. 取4个代表性滑行速度10 m/s(滑行道)、30 m/s(中高速滑跑)、70 m/s(高速滑跑)和80 m/s(近起飞),以飞机质心竖向最大加速度最大值的85%对应的波段作为敏感波段,在上述速度下滑行时,竖向加速度的敏感波段分别为λ≤4 m、λ≤4 m、5≤λ≤25 m和20≤λ≤50 m. 不考虑道面单向约束时,各速度下对应的敏感波段均为λ≤4 m,可见,不平整段敏感波长有明显的速度相关性. 按国际道路协会常设委员会对路面不平整度波长的划分标准(短波0.5~5 m、中波5~15 m和长波15~50 m)[8],对沉降变形模式,低速和中高速滑跑对短波沉降更为敏感,高速滑跑对中、长波沉降更为敏感.
道面隆起时,在隆起变形的上升段,机轮始终与道面接触,机体响应与不考虑单向约束作用时相似. 进入下降段后,机体的振动响应取决于机轮是否发生脱离以及重新落地的时间和位置. 当脱离程度不大时,最大振动响应出现在加速度的谷值(图6Ⅴ);飞机滑跑速度增大、变形波长减小,机轮与道面发生严重脱离,加速度谷值逐渐消失,最大加速度响应出现在第2个峰值点处,即惯性冲高又落地带来的振动(图7Ⅲ);变形波长进一步减小、滑跑速度增大时,飞机因惯性冲高及落地产生的振动响应的增长有限,最大振动响应对应位置逐渐转移到道面抬升时出现加速度峰值处(图7Ⅱ). 同样的,进行隆起变形敏感波段分析,飞机在上述各速度下滑行时竖向加速度的敏感波段均为λ≤4 m,与不考虑道面单向约束一致. 这与前述分析吻合,隆起变形波长减小会带来最大振动响应发生位置的变化,反之则影响不大. 对隆起变形,敏感波段始终为短波.
3. 随机不平整激励下考虑道面单向约束的飞机动力响应
3.1. 机轮与道面脱开时间
为了进一步模拟真实跑道情况,模拟道面长度1000 m、平整度为1、2、3、4、5 m/km的各20组随机道面轮廓,在v=80 m/s工况下,计算机体振动响应. 因篇幅所限,仅代表性地给出飞机在IRI=3 m/km时的某随机道面上滑跑时主起落架机轮竖向位移和质心竖向加速度时程及功率谱曲线,如图12所示. 由图可知,考虑道面单向约束后的竖向最大位移明显大于未考虑单向约束作用时,且当道面差异变形较大时,机轮容易与道面脱开. 根据计算结果,统计v=80 m/s飞机在不同IRI道面上滑跑时机轮与道面脱开的时间占总滑跑时间的比例Tr,如表3所示. 道面越不平整,机轮与道面脱开的时间越长. 当道面不平整程度被评为良时,Tr=1/3;当道面不平整程度被评为次时(IRI=5),Tr>1/2. 为了保证飞机滑跑安全性,盖利庆[22]曾建议,机轮可能出现“跳跃”的滑行距离应控制在总滑行距离的1/4以内,按此标准,计算得到IRI=3 m/km时的最大安全滑行速度为71 m/s. 考虑机场道面的一般情况,本文以70 m/s作为高速滑跑的分界,大于该速度时,不考虑道面的单向约束,会造成滑跑过程机体振动响应计算的严重偏差,无法为道面设计、维护与结构动力响应分析提供有效参考.
图 12
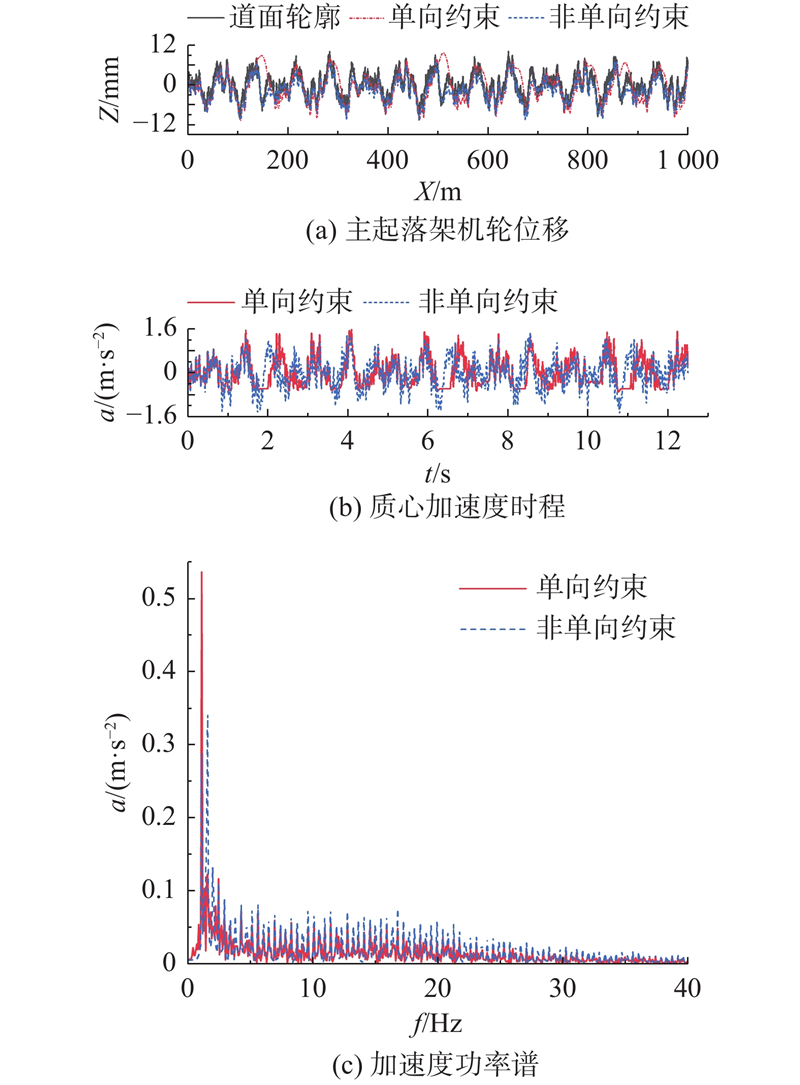
图 12 飞机在随机道面滑跑时主起落架机轮位移曲线、质心加速度时程及功率谱曲线
Fig.12 Displacement curve of main landing gear wheel, vertical acceleration-time curve and acceleration power spectrum curve of mass center when airplane taxiing on random pavement
表 3 飞机在不同IRI道面上滑跑时机轮Tr
Tab.3
| IRI/(m·km−1) | 道面评价[1] (水泥混凝土道面) | Tr/% |
| 1 | 优 | 0.01~0.62 |
| 2 | 优 | 11.11~13.67 |
| 3 | 良 | 28.72~39.81 |
| 4 | 中 | 44.42~50.04 |
| 5 | 次 | 50.44~56.10 |
3.2. 加速度及其频响特性
3.3. 对平整度评价指标的影响
除amax外,ISO2631-1采用人体加权加速度均方根值arms评价人体的舒适度,计算公式[19] 如下。
式中:aF为通过傅里叶变换得到的频域加速度,w(f)为频域加权函数.
如图13所示为IRI=1~5 m/km对应的各20组随机道面输入下,是否考虑单向约束时amax、arms变化范围. 由图可以看出amax、arms均随着IRI的增大而增加,反映飞机振动响应随道面劣化程度增大的规律. 但是,这2个指标在反映道面单向约束作用的影响时,有较大区别. amax在IRI=1 m/km时,因机轮与道面贴合程度好,考虑道面单向约束与否对amax几乎无影响外,其余情况下均呈现考虑道面单向约束时的amax比未考虑单向约束时有所增大. 在IRI=3位置处,这种差异最大,两者间均值之比为1.07. 相比之下,arms较不考虑道面单向约束作用有所减小,并随道面平整度的劣化而差异增大,这是机轮脱离道面时负向加速度幅值显著降低,计算arms时,加权平均考虑了负向加速度的缘故. 因此,在考虑道面单向约束作用进行机场跑道平整度评价标准修订时,对amax、arms应采用不同的修正原则.
图 13
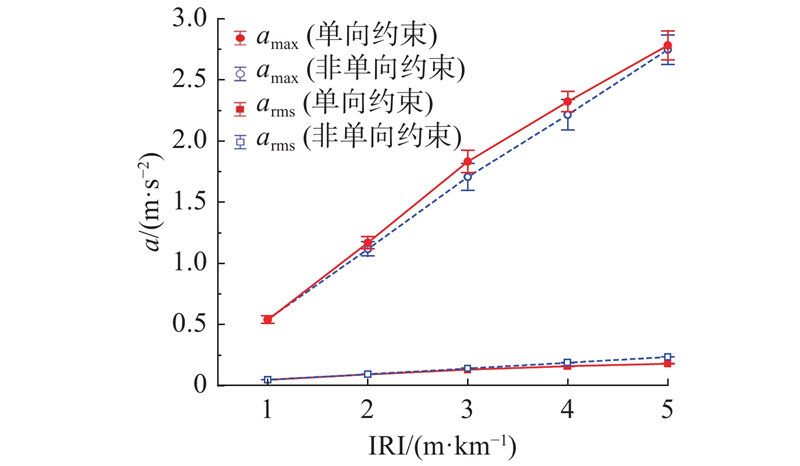
图 13 考虑和不考虑单向约束时amax、arms随IRI的变化
Fig.13 Changes of amax, arms with IRI with and without considering unilateral constraints
4. 结 论
(1)基于B737-800机型,建立考虑机场道面对机轮单向约束作用的六自由度模型,采用本文提出的接触状态改变法求解变刚度矩阵和变力矩阵的飞机滑跑问题,在不影响精度的前提下,求解速度更快,起落架组数越多,优势越明显.
(2)考虑道面单向约束作用时,飞机振动响应具有道面变形模式依赖性,不再与滑跑速度、道面变形幅值、变形波长单调相关. 对沉降变形模式,低速和中高速滑跑对短波沉降更为敏感,高速滑跑对中、长波沉降更为敏感;对隆起变形模式,敏感波段始终为短波. 单向约束削弱了飞机负向振动响应,但对正向振动响应的作用较为复杂,与道面变形模式、机轮脱离道面程度、重新落地位置有关,具有不确定性. 一般表现为道面隆起时增强,道面沉降且波长较短时起削弱作用.
(3)飞机滑行速度越快、道面越不平整,机轮脱离道面概率越大. 当IRI=3 m/km时,飞机以超过70 m/s速度滑跑,机轮可能脱离道面的距离占比超过1/4,已对滑跑安全造成威胁;跑道性质劣化,当IRI=5 m/km时,以飞机80 m/s的速度滑跑为例,机轮脱离道面时间占比超过1/2. 道面单向约束作用增大低频振动、降低高频振动和振动卓越频率的效果,使得飞机滑跑时振动能量向更低频集中.
(4)在评价机场跑道平整度的2个指标中,机体质心竖向最大加速度比未考虑道面单向约束时有所增大,竖向加速度均方根值有所减小,因此,在考虑道面单向约束作用进行机场跑道平整度评价标准修订时,对2个指标的修正原则应是不同的.
(5)本文假定飞机匀速滑跑,实际上飞机在起降过程中总是变速滑行的,结合飞机起降姿态、变速过程进行飞机振动响应分析,评价道面平整度是本研究下一步的工作方向.
参考文献
Aircraft-based pavement surface roughness assessment
[J].
机场道面平整度评价技术进展及发展方向
[J].DOI:10.3969/j.issn.1674-5590.2016.02.009 [本文引用: 2]
Progress and developing trend of airport pavement roughness evaluation technology
[J].DOI:10.3969/j.issn.1674-5590.2016.02.009 [本文引用: 2]
机场跑道地基差异沉降控制标准研究
[J].
Research about foundation differential settlement controlling standards for airport runway
[J].
波音平整度评价方法的局限性分析
[J].
Application limitation of Boeing bump to evaluation runway roughness
[J].
采用IRI评价机场道面平整度的适用性
[J].DOI:10.3969/j.issn.1671-1637.2017.01.003 [本文引用: 3]
Applicability of IRI based evaluation of airport pavement roughness
[J].DOI:10.3969/j.issn.1671-1637.2017.01.003 [本文引用: 3]
不平整激励下机场道面和公路路面平整度评价综合分析
[J].
Comprehensive analysis of pavement roughness evaluation for airport and road with different roughness excitation
[J].
Evaluation of airport runway pavement based on pilots' subjective judgement
[J].
基于ADAMS的机场道面平整度评价方法
[J].
An evaluation method for roughness of airport pavement based on ADAMS
[J].
Airport pavement roughness evaluation based on cockpit and center of gravity vertical accelerations
[J].DOI:10.14295/transportes.v28i1.1932 [本文引用: 1]
Comparison of methods for evaluating airport pavement roughness
[J].DOI:10.1080/10298436.2017.1345554 [本文引用: 1]
The impact of road roughness on the duration of contact between a vehicle wheel and road surface
[J].DOI:10.3846/16484142.2014.984330 [本文引用: 1]
高填方机场工后沉降监测及数据分析
[J].DOI:10.3969/j.issn.1674-5590.2017.03.007 [本文引用: 1]
Post-construction settlement monitoring and data analysis of high filling engineering of airport
[J].DOI:10.3969/j.issn.1674-5590.2017.03.007 [本文引用: 1]
机场跑道破损坑槽对飞机滑跑动力的影响
[J].
Dynamic influence of distress runway pothole on aircraft running
[J].
基于MATLAB的机场道面不平度模拟技术研究
[J].DOI:10.3969/j.issn.1674-0610.2016.03.002 [本文引用: 1]
Research of airport pavement roughness simulation technology based on Matlab
[J].DOI:10.3969/j.issn.1674-0610.2016.03.002 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}