[1]
FLORENCE D, GARBAY C, RIALLE V Learning recurrent behaviors from heterogeneous multivariate time-series
[J]. Artificial Intelligence in Medicine , 2007 , 39 (1 ): 25 - 47
DOI:10.1016/j.artmed.2006.07.004
[本文引用: 1]
[2]
FUCHSBERGER V. Ambient assisted living: elderly people’s needs and how to face them[C]// Proceedings of 1st ACM International Workshop on Semantic Ambient Media Experiences . Vancouver: ACM, 2008: 27-31.
[3]
文顺菊. 我国失能老人的照护需求与照护成本测算[D]. 成都: 西南财经大学, 2016.
[本文引用: 1]
WEN Shun-ju. Calculation of care needs and care costs of disabled elderly in China[D]. Chengdu: Southwestern University of Finance and Economics, 2016.
[本文引用: 1]
[4]
WILD K, BOISE L, LUNDELL J, et al Unobtrusive in-home monitoring of cognitive and physical health: reactions and perceptions of older adults
[J]. Journal of Applied Gerontology , 2008 , 27 (2 ): 181 - 200
DOI:10.1177/0733464807311435
[本文引用: 1]
[5]
BARREET T W History of ultra wideband communications and radar
[J]. Microwave Journal , 2001 , 44 (2 ): 22 - 46
[本文引用: 1]
[6]
费元春. 超宽带雷达理论与技术[M]. 北京: 国防工业出版社, 2010.
[本文引用: 3]
[7]
周金海, 王依川, 佟鲸鲆, 等 基于慢时间分割的超宽带雷达步态识别
[J]. 浙江大学学报: 工学版 , 2020 , 54 (2 ): 283 - 290
URL
[本文引用: 1]
ZHOU Jin-hai, WANG Yi-chuan, TONG Jing-ping, et al Ultra wide band radar gait recognition based on slow-time segmentation
[J]. Journal of Zhejiang University: Engineering Science , 2020 , 54 (2 ): 283 - 290
URL
[本文引用: 1]
[8]
JOKANOVIC B, AMIN M, AHMAD F. Radar fall motion detection using deep learning[C]// 2016 IEEE Radar Conference . Philadelphia: IEEE, 2016: 1-6.
[9]
WANG Yi-chuan, ZHOU Jin-hai, TONG Jing-ping, et al UWB-radar-based synchronous motion recognition using time-varying range-Doppler images
[J]. IET Radar, Sonar and Navigation , 2019 , 13 (12 ): 2131 - 2139
DOI:10.1049/iet-rsn.2019.0240
[10]
RAHEEL M S, COYTE J, TUBBAL F, et al. Breathing and heartrate monitoring system using IR-UWB radar[C]// 2019 13th International Conference on Signal Processing and Communication Systems . Gold Coast: IEEE, 2019: 1-5.
[11]
KIM S H, GEEM Z W, HAN G T A novel human respiration pattern recognition using signals of ultra-wideband radar sensor
[J]. Sensors , 2019 , 19 (15 ): 3340
DOI:10.3390/s19153340
[本文引用: 1]
[12]
CHOI J W, NAM S S, CHO S H Multi-human detection algorithm based on an impulse radio ultra-wideband radar system
[J]. IEEE Access , 2016 , 4 : 10300 - 10309
DOI:10.1109/ACCESS.2016.2647226
[本文引用: 2]
[13]
武江涛. 雷达扩展目标跟踪算法研究[D]. 西安: 西安电子科技大学, 2014.
[本文引用: 2]
WU Jiang-tao. Research of radar extended target tracking[D]. Xi’an: Xidian University, 2014.
[本文引用: 2]
[14]
SAKAMOTO T, SATO T, AUBRY P J, et al Texture-based automatic separation of echoes from distributed moving targets in UWB radar signals
[J]. IEEE Transactions of Geoscience and Remote Sensing , 2015 , 53 (1 ): 352 - 361
DOI:10.1109/TGRS.2014.2322438
[15]
李剑菡. 基于卷积神经网络的人体生命体征和多目标检测算法研究[D]. 北京: 北京邮电大学, 2019.
[本文引用: 1]
LI Jian-han. Human vital signs and multi-targets detection based on convolutional neural network[D]. Beijing: Beijing University of Post and Telecommunications, 2019.
[本文引用: 1]
[16]
刘金超. 超宽带雷达人体目标检测与跟踪[D]. 长沙: 国防科学技术大学, 2014.
[本文引用: 5]
LIU Jin-chao. Human target detection and tracking with ultra-wideband radar[D]. Changsha: National University of Defense Technology, 2014.
[本文引用: 5]
[17]
CHANG S H, SHARAN R, WOLF M, et al People tracking with UWB radar using a multiple-hypothesis tracking of clusters (MHTC) method
[J]. International Journal of Social Robotics , 2010 , 2 (1 ): 3 - 18
DOI:10.1007/s12369-009-0039-x
[本文引用: 3]
[18]
RICHARDS M A. 雷达信号处理基础[M]. 刑孟道, 王彤, 李真芳, 等, 译. 2版. 北京: 电子工业出版社, 2017.
[本文引用: 2]
[19]
NGUYEN V, PYUN J Location detection and tracking of moving targets by a 2D IR-UWB radar system
[J]. Sensors , 2015 , 15 (3 ): 6740 - 6762
DOI:10.3390/s150306740
[本文引用: 5]
[20]
HALL D L. 多传感器数据融合手册[M]. 杨露清, 耿伯英, 译. 北京: 电子工业出版社, 2008.
[本文引用: 1]
[21]
ANDERSON N, MICHAELSEN J A, BAGGA S, et al A 118-mW pulse-based radar SoC in 55-nm CMOS for non-contact human vital signals detection
[J]. IEEE Journal of Solid-State Circuits , 2017 , 52 (12 ): 3421 - 3433
DOI:10.1109/JSSC.2017.2764051
[本文引用: 1]
[22]
CRAMER R J, SCHOLTZ R A, WIN M Z Evaluation of an ultra-wide-band propagation channel
[J]. IEEE Transactions on Antennas and Propagation , 2002 , 5 (50 ): 561 - 570
URL
[本文引用: 1]
[23]
TSAO J, PORRAT D Prediction and modeling for the time-evolving ultra-wideband channel
[J]. IEEE Journal of Selected Topics in Signal Processing , 2007 , 1 (3 ): 340 - 356
DOI:10.1109/JSTSP.2007.906662
[本文引用: 1]
[24]
RICHARD L. Quadrature signals: complex, but not complicated [EB/OL]. [2020-01-04]. https://www.ieee.li/pdf/essay/quadrature_signals.pdf.
[本文引用: 1]
[25]
XeThru explorer [EB/OL]. [2020-01-04]. https://www.xethru.com/community/resources/categories/xethru-explorer.3/.
[本文引用: 1]
[26]
CHIO J W, YIM D H, CHO S H People counting based on an IR-UWB radar sensor
[J]. IEEE Sensors Journal , 2017 , 17 (17 ): 5717 - 5727
DOI:10.1109/JSEN.2017.2723766
[本文引用: 1]
Learning recurrent behaviors from heterogeneous multivariate time-series
1
2007
... 在环境辅助生活(ambient assisted living,AAL)领域中,人体目标跟踪是非常重要的环节. 通过跟踪可以计算得到目标的位置和速度,结合环境先验知识,能够实现行为识别、活动量估计及失能程度评估[1 -3 ] . ...
1
... 在环境辅助生活(ambient assisted living,AAL)领域中,人体目标跟踪是非常重要的环节. 通过跟踪可以计算得到目标的位置和速度,结合环境先验知识,能够实现行为识别、活动量估计及失能程度评估[1 -3 ] . ...
1
... 在环境辅助生活(ambient assisted living,AAL)领域中,人体目标跟踪是非常重要的环节. 通过跟踪可以计算得到目标的位置和速度,结合环境先验知识,能够实现行为识别、活动量估计及失能程度评估[1 -3 ] . ...
Unobtrusive in-home monitoring of cognitive and physical health: reactions and perceptions of older adults
1
2008
... 目前,人体目标感知主要基于摄像头和可穿戴设备,但前者因亮度要求和隐私暴露的缺陷无法在家庭敏感区域内使用,后者的侵入性使得很多人(尤其老年人)没有佩戴和学习使用的意愿[4 ] . 超宽带雷达是特殊的新型雷达,工作带宽不小于中心频率的20%或瞬时带宽大于500 MHz[5 -6 ] . 虽然作为室内传感的起步时间较晚,但超宽带雷达具有非侵入性和隐私保护的优点,在步态识别、动作识别和呼吸心跳检测[7 -11 ] 等方面展现出一定的应用潜力. ...
History of ultra wideband communications and radar
1
2001
... 目前,人体目标感知主要基于摄像头和可穿戴设备,但前者因亮度要求和隐私暴露的缺陷无法在家庭敏感区域内使用,后者的侵入性使得很多人(尤其老年人)没有佩戴和学习使用的意愿[4 ] . 超宽带雷达是特殊的新型雷达,工作带宽不小于中心频率的20%或瞬时带宽大于500 MHz[5 -6 ] . 虽然作为室内传感的起步时间较晚,但超宽带雷达具有非侵入性和隐私保护的优点,在步态识别、动作识别和呼吸心跳检测[7 -11 ] 等方面展现出一定的应用潜力. ...
3
... 目前,人体目标感知主要基于摄像头和可穿戴设备,但前者因亮度要求和隐私暴露的缺陷无法在家庭敏感区域内使用,后者的侵入性使得很多人(尤其老年人)没有佩戴和学习使用的意愿[4 ] . 超宽带雷达是特殊的新型雷达,工作带宽不小于中心频率的20%或瞬时带宽大于500 MHz[5 -6 ] . 虽然作为室内传感的起步时间较晚,但超宽带雷达具有非侵入性和隐私保护的优点,在步态识别、动作识别和呼吸心跳检测[7 -11 ] 等方面展现出一定的应用潜力. ...
... 在超宽带雷达感知系统中,不同于传统的雷达目标检测,人体的相对大尺度及多散射点特性使其具有距离扩展性[6 , 12 ] . 目前,人体目标检测主要有以下2种方式. 1)通过相似性度量,将距离扩展目标退化成点目标. 2)根据雷达回波和计算得到的时间-距离-多普勒图像,通过人工标注特征或者机器学习实现目标检测,但这种检测往往针对单目标,对多目标则难以得到每个目标所在的位置[13 -15 ] . 第2种方法需要消耗大量的计算资源,不适用于目标跟踪这种对实时性要求高的持续过程. ...
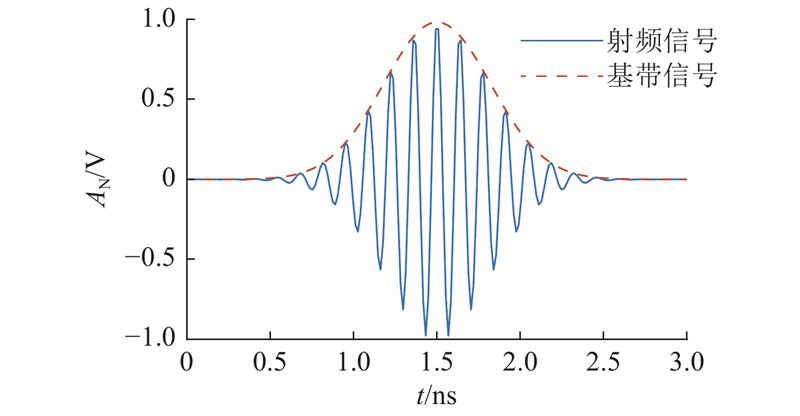
... 常用的超宽带雷达分为连续波体制(FMCW)和极窄脉冲体制(IR)两大类,后者具有穿透性强、功耗低、抗多径等特点,更适合引入室内AAL系统,因此本研究所讨论的超宽带雷达都基于极窄脉冲体制. 发射的脉冲波形可以有多种形式,其中频移高斯脉冲具有相对良好的频谱分布且容易在CMOS上实现,在工程上更常应用[6 , 21 ] . 归一化的频移高斯脉冲可以表示为 ...
基于慢时间分割的超宽带雷达步态识别
1
2020
... 目前,人体目标感知主要基于摄像头和可穿戴设备,但前者因亮度要求和隐私暴露的缺陷无法在家庭敏感区域内使用,后者的侵入性使得很多人(尤其老年人)没有佩戴和学习使用的意愿[4 ] . 超宽带雷达是特殊的新型雷达,工作带宽不小于中心频率的20%或瞬时带宽大于500 MHz[5 -6 ] . 虽然作为室内传感的起步时间较晚,但超宽带雷达具有非侵入性和隐私保护的优点,在步态识别、动作识别和呼吸心跳检测[7 -11 ] 等方面展现出一定的应用潜力. ...
基于慢时间分割的超宽带雷达步态识别
1
2020
... 目前,人体目标感知主要基于摄像头和可穿戴设备,但前者因亮度要求和隐私暴露的缺陷无法在家庭敏感区域内使用,后者的侵入性使得很多人(尤其老年人)没有佩戴和学习使用的意愿[4 ] . 超宽带雷达是特殊的新型雷达,工作带宽不小于中心频率的20%或瞬时带宽大于500 MHz[5 -6 ] . 虽然作为室内传感的起步时间较晚,但超宽带雷达具有非侵入性和隐私保护的优点,在步态识别、动作识别和呼吸心跳检测[7 -11 ] 等方面展现出一定的应用潜力. ...
UWB-radar-based synchronous motion recognition using time-varying range-Doppler images
0
2019
A novel human respiration pattern recognition using signals of ultra-wideband radar sensor
1
2019
... 目前,人体目标感知主要基于摄像头和可穿戴设备,但前者因亮度要求和隐私暴露的缺陷无法在家庭敏感区域内使用,后者的侵入性使得很多人(尤其老年人)没有佩戴和学习使用的意愿[4 ] . 超宽带雷达是特殊的新型雷达,工作带宽不小于中心频率的20%或瞬时带宽大于500 MHz[5 -6 ] . 虽然作为室内传感的起步时间较晚,但超宽带雷达具有非侵入性和隐私保护的优点,在步态识别、动作识别和呼吸心跳检测[7 -11 ] 等方面展现出一定的应用潜力. ...
Multi-human detection algorithm based on an impulse radio ultra-wideband radar system
2
2016
... 在超宽带雷达感知系统中,不同于传统的雷达目标检测,人体的相对大尺度及多散射点特性使其具有距离扩展性[6 , 12 ] . 目前,人体目标检测主要有以下2种方式. 1)通过相似性度量,将距离扩展目标退化成点目标. 2)根据雷达回波和计算得到的时间-距离-多普勒图像,通过人工标注特征或者机器学习实现目标检测,但这种检测往往针对单目标,对多目标则难以得到每个目标所在的位置[13 -15 ] . 第2种方法需要消耗大量的计算资源,不适用于目标跟踪这种对实时性要求高的持续过程. ...
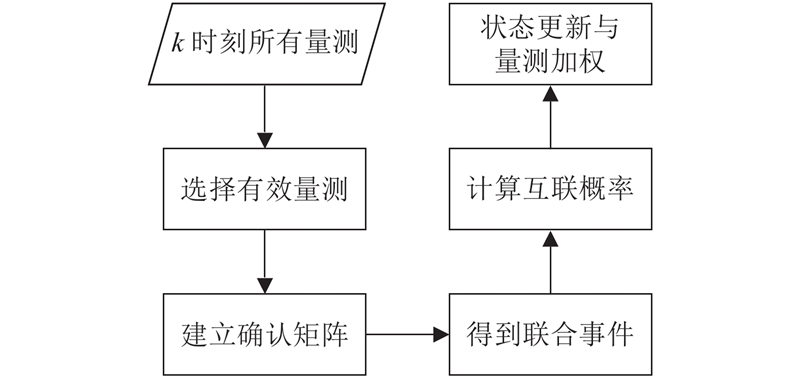
... 在多人目标跟踪方面,Choi等[12 ] 实现了对不同目标的检测,未对轨迹进行关联和划分. 刘金超[16 ] 运用联合概率数据互联算法(joint probabilistic data association,JPDA)实现了轨迹交叉情况下的多目标跟踪,但没有对目标初始状态的确定进行说明,只跟踪了速度反向、轨迹只交叉一次的情况. Chang等[17 ] 运用多假设跟踪算法(multiple-hypothesis tracking,MHT)实现了目标数量可变的跟踪,但实验是在室外空旷环境进行的,对于室内多杂波的情况,可能会导致计算量爆炸. ...
2
... 在超宽带雷达感知系统中,不同于传统的雷达目标检测,人体的相对大尺度及多散射点特性使其具有距离扩展性[6 , 12 ] . 目前,人体目标检测主要有以下2种方式. 1)通过相似性度量,将距离扩展目标退化成点目标. 2)根据雷达回波和计算得到的时间-距离-多普勒图像,通过人工标注特征或者机器学习实现目标检测,但这种检测往往针对单目标,对多目标则难以得到每个目标所在的位置[13 -15 ] . 第2种方法需要消耗大量的计算资源,不适用于目标跟踪这种对实时性要求高的持续过程. ...
... 传统的点目标跟踪理论主要包括航迹起始、数据关联和跟踪滤波3部分. 在实际目标数目在过程中保持不变的前提下,针对检测得到的量测,要确定各目标的初始航迹并进行跟踪预测,对下一时刻的量测进行数据关联并滤波,从而形成稳定的跟踪轨迹. 对于超宽带雷达下的人体目标跟踪,基带CLEAN检测降低了距离扩展性,但每个目标仍可能有多个量测. 若采用传统点目标的跟踪方法,则会产生目标分裂和虚假航迹,后续数据关联的计算量大幅增加. 本文在检测簇[26 ] 和逻辑法航迹起始[13 ] 的基础上,提出基于凝聚和跳窗的状态起始法,旨在辨识来源于同一个人体目标的多个量测的同一性,快速、稳定地确定目标个数和起始航迹. 量测本身是无标识的,但来自于同一个目标的量测,在距离单元上表现得比较集中,因此凝聚时采用欧式距离作为相似度度量方式. 在凝聚之前对每1帧的所有量测进行从小到大排序,将每个量测作为一类;从前往后开始遍历,对类间距处在阈值内的所有类合并为新类,取平均值作为新的量测. 凝聚的伪代码如下. ...
2
... 在超宽带雷达感知系统中,不同于传统的雷达目标检测,人体的相对大尺度及多散射点特性使其具有距离扩展性[6 , 12 ] . 目前,人体目标检测主要有以下2种方式. 1)通过相似性度量,将距离扩展目标退化成点目标. 2)根据雷达回波和计算得到的时间-距离-多普勒图像,通过人工标注特征或者机器学习实现目标检测,但这种检测往往针对单目标,对多目标则难以得到每个目标所在的位置[13 -15 ] . 第2种方法需要消耗大量的计算资源,不适用于目标跟踪这种对实时性要求高的持续过程. ...
... 传统的点目标跟踪理论主要包括航迹起始、数据关联和跟踪滤波3部分. 在实际目标数目在过程中保持不变的前提下,针对检测得到的量测,要确定各目标的初始航迹并进行跟踪预测,对下一时刻的量测进行数据关联并滤波,从而形成稳定的跟踪轨迹. 对于超宽带雷达下的人体目标跟踪,基带CLEAN检测降低了距离扩展性,但每个目标仍可能有多个量测. 若采用传统点目标的跟踪方法,则会产生目标分裂和虚假航迹,后续数据关联的计算量大幅增加. 本文在检测簇[26 ] 和逻辑法航迹起始[13 ] 的基础上,提出基于凝聚和跳窗的状态起始法,旨在辨识来源于同一个人体目标的多个量测的同一性,快速、稳定地确定目标个数和起始航迹. 量测本身是无标识的,但来自于同一个目标的量测,在距离单元上表现得比较集中,因此凝聚时采用欧式距离作为相似度度量方式. 在凝聚之前对每1帧的所有量测进行从小到大排序,将每个量测作为一类;从前往后开始遍历,对类间距处在阈值内的所有类合并为新类,取平均值作为新的量测. 凝聚的伪代码如下. ...
Texture-based automatic separation of echoes from distributed moving targets in UWB radar signals
0
2015
1
... 在超宽带雷达感知系统中,不同于传统的雷达目标检测,人体的相对大尺度及多散射点特性使其具有距离扩展性[6 , 12 ] . 目前,人体目标检测主要有以下2种方式. 1)通过相似性度量,将距离扩展目标退化成点目标. 2)根据雷达回波和计算得到的时间-距离-多普勒图像,通过人工标注特征或者机器学习实现目标检测,但这种检测往往针对单目标,对多目标则难以得到每个目标所在的位置[13 -15 ] . 第2种方法需要消耗大量的计算资源,不适用于目标跟踪这种对实时性要求高的持续过程. ...
1
... 在超宽带雷达感知系统中,不同于传统的雷达目标检测,人体的相对大尺度及多散射点特性使其具有距离扩展性[6 , 12 ] . 目前,人体目标检测主要有以下2种方式. 1)通过相似性度量,将距离扩展目标退化成点目标. 2)根据雷达回波和计算得到的时间-距离-多普勒图像,通过人工标注特征或者机器学习实现目标检测,但这种检测往往针对单目标,对多目标则难以得到每个目标所在的位置[13 -15 ] . 第2种方法需要消耗大量的计算资源,不适用于目标跟踪这种对实时性要求高的持续过程. ...
5
... 在多人目标跟踪方面,Choi等[12 ] 实现了对不同目标的检测,未对轨迹进行关联和划分. 刘金超[16 ] 运用联合概率数据互联算法(joint probabilistic data association,JPDA)实现了轨迹交叉情况下的多目标跟踪,但没有对目标初始状态的确定进行说明,只跟踪了速度反向、轨迹只交叉一次的情况. Chang等[17 ] 运用多假设跟踪算法(multiple-hypothesis tracking,MHT)实现了目标数量可变的跟踪,但实验是在室外空旷环境进行的,对于室内多杂波的情况,可能会导致计算量爆炸. ...
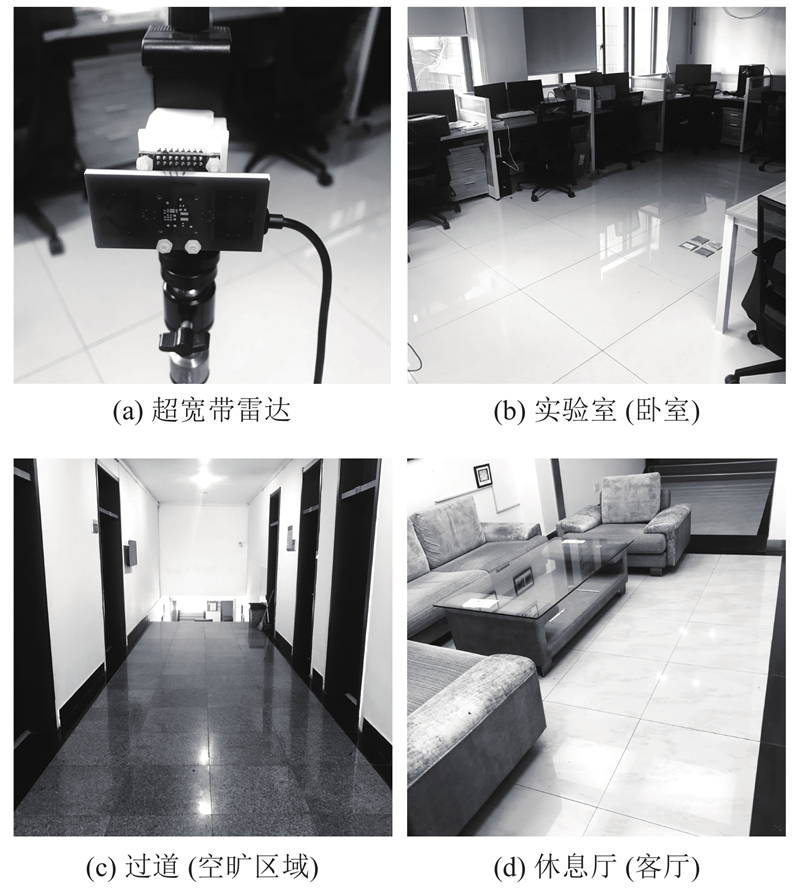
... 考虑到AAL系统的主要面向对象为空巢老年人,一户人家通常不超过2位,活动监测范围限制在室内. 为了结合目标跟踪和AAL系统达到工程化应用的目的,本文在前人工作的基础上,提出基于超宽带雷达基带信号的多人目标跟踪方法. 该方法对采集到的射频回波进行下变频和抽取,通过动目标指示(moving target indication,MTI)[18 ] 去除杂波,采用基带CLEAN检测提取得到目标散射点. 使用凝聚和跳窗方法确定目标个数及初始状态,利用JPDA和卡尔曼滤波(Kalman filter,KF)[16 , 19 -20 ] 进行关联与跟踪. 在实验室、过道和休息厅3种室内环境下进行实测实验,计算得到该方法对多人目标跟踪的准确度,验证利用该方法能够更快地完成目标检测,减少了数据存储空间. ...
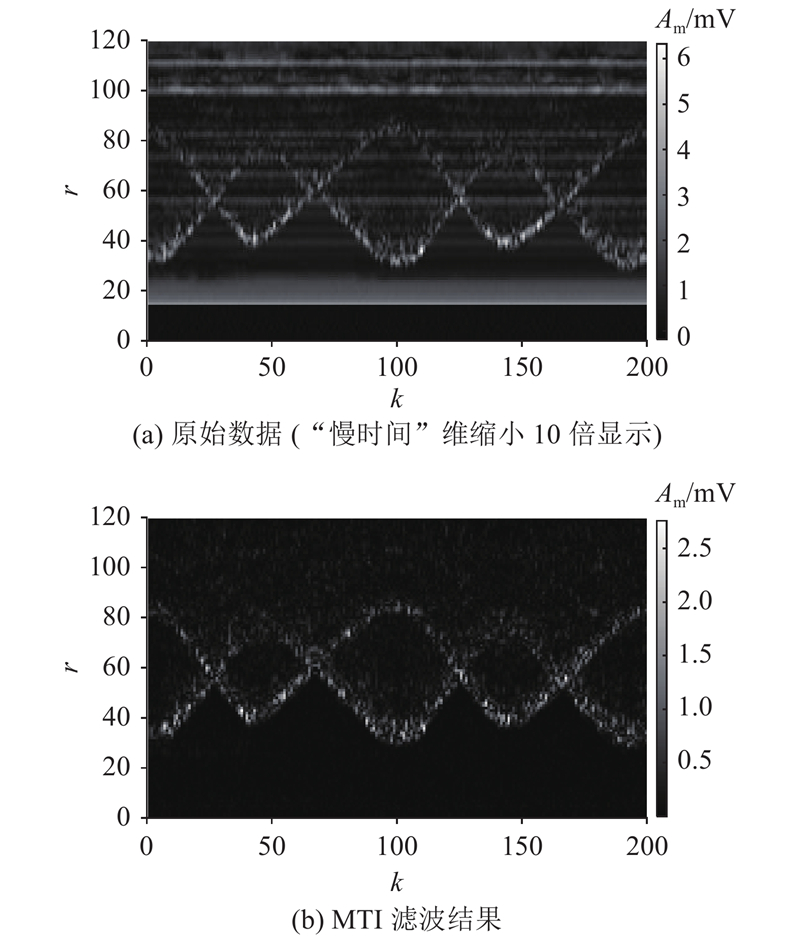
... 实际上,由于室内存在其他相对静止的物体,例如墙壁、桌子、书柜等,超宽带雷达接收到的回波中将包含很多静杂波,对目标检测造成干扰. 杂波滤除主要有简单平均法、背景消除法和基于统计的方法[16 , 19 ] . 在脉冲雷达中,更常用的方法是MTI. 通过雷达帧间差分,即 ...
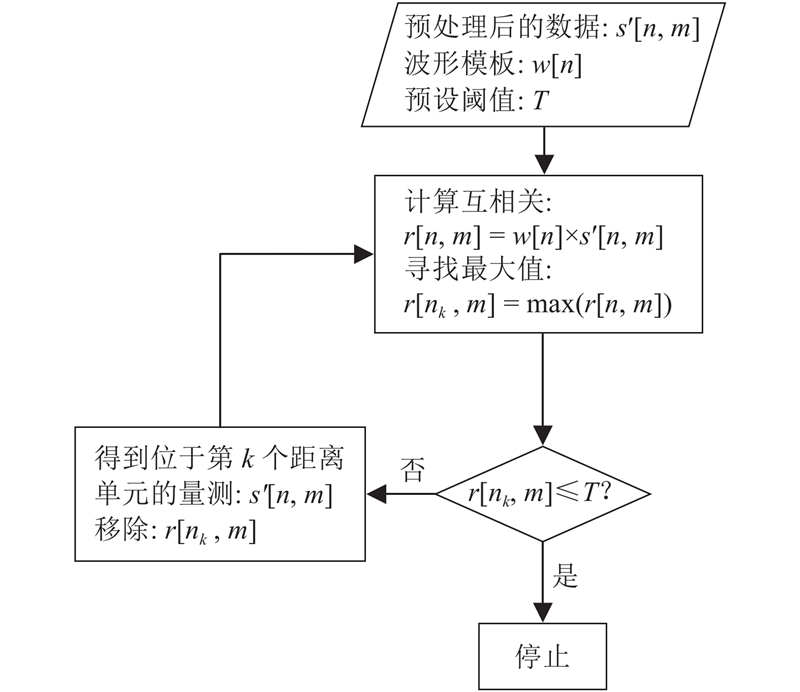
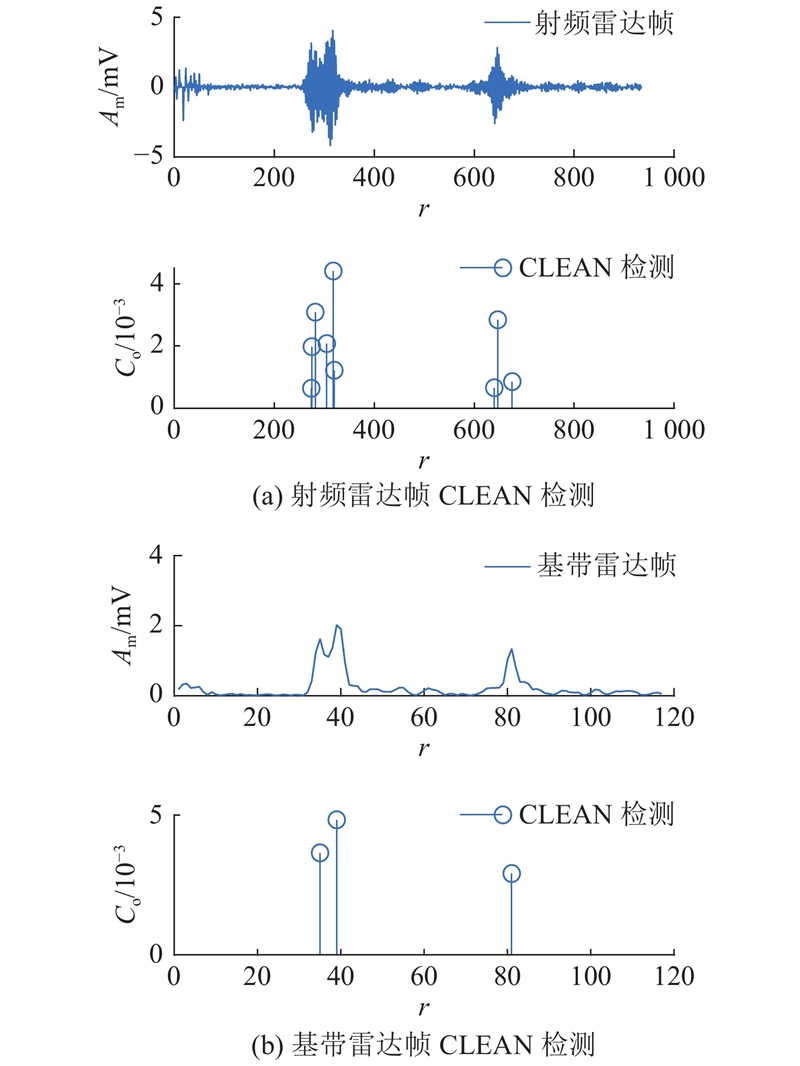
... 传统CLEAN算法的输入是波形模板和预处理后的雷达帧,通过互相关和阈值对比搜索最大值. 与恒虚警类检测器相比,CLEAN算法既保留了目标信息,也避免了目标遮蔽,被认为是人体目标检测更有效的手段[16 -17 , 19 ] . CLEAN算法逻辑如图2 所示. ...
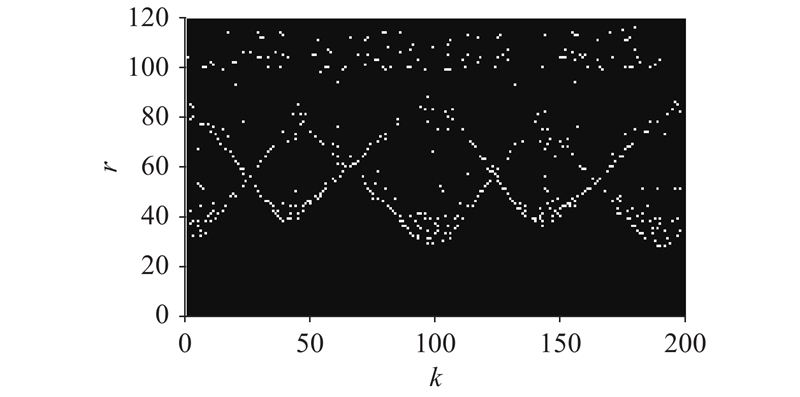
... 关于波形模板和阈值的选择,详见文献[17 , 19 ],此处不作展开. 由于本研究的输入是基带雷达帧,波形模板要作同样的处理,整个CLEAN过程建立在基带信号上. 人体目标在行走过程中,身体各部分的运动幅度以及与雷达的相对观测角度都在不断发生变化,因此即便是同一个目标,在每次检测中,得到的散射点数也可能不同,但往往集中在1~3个[16 , 19 ] . 基带CLEAN检测可以获取目标散射点的幅度和距离信息,但为了方便说明跟踪过程,本文中的“量测”均指距离,即表示该距离单元处可能存在目标. ...
5
... 在多人目标跟踪方面,Choi等[12 ] 实现了对不同目标的检测,未对轨迹进行关联和划分. 刘金超[16 ] 运用联合概率数据互联算法(joint probabilistic data association,JPDA)实现了轨迹交叉情况下的多目标跟踪,但没有对目标初始状态的确定进行说明,只跟踪了速度反向、轨迹只交叉一次的情况. Chang等[17 ] 运用多假设跟踪算法(multiple-hypothesis tracking,MHT)实现了目标数量可变的跟踪,但实验是在室外空旷环境进行的,对于室内多杂波的情况,可能会导致计算量爆炸. ...
... 考虑到AAL系统的主要面向对象为空巢老年人,一户人家通常不超过2位,活动监测范围限制在室内. 为了结合目标跟踪和AAL系统达到工程化应用的目的,本文在前人工作的基础上,提出基于超宽带雷达基带信号的多人目标跟踪方法. 该方法对采集到的射频回波进行下变频和抽取,通过动目标指示(moving target indication,MTI)[18 ] 去除杂波,采用基带CLEAN检测提取得到目标散射点. 使用凝聚和跳窗方法确定目标个数及初始状态,利用JPDA和卡尔曼滤波(Kalman filter,KF)[16 , 19 -20 ] 进行关联与跟踪. 在实验室、过道和休息厅3种室内环境下进行实测实验,计算得到该方法对多人目标跟踪的准确度,验证利用该方法能够更快地完成目标检测,减少了数据存储空间. ...
... 实际上,由于室内存在其他相对静止的物体,例如墙壁、桌子、书柜等,超宽带雷达接收到的回波中将包含很多静杂波,对目标检测造成干扰. 杂波滤除主要有简单平均法、背景消除法和基于统计的方法[16 , 19 ] . 在脉冲雷达中,更常用的方法是MTI. 通过雷达帧间差分,即 ...
... 传统CLEAN算法的输入是波形模板和预处理后的雷达帧,通过互相关和阈值对比搜索最大值. 与恒虚警类检测器相比,CLEAN算法既保留了目标信息,也避免了目标遮蔽,被认为是人体目标检测更有效的手段[16 -17 , 19 ] . CLEAN算法逻辑如图2 所示. ...
... 关于波形模板和阈值的选择,详见文献[17 , 19 ],此处不作展开. 由于本研究的输入是基带雷达帧,波形模板要作同样的处理,整个CLEAN过程建立在基带信号上. 人体目标在行走过程中,身体各部分的运动幅度以及与雷达的相对观测角度都在不断发生变化,因此即便是同一个目标,在每次检测中,得到的散射点数也可能不同,但往往集中在1~3个[16 , 19 ] . 基带CLEAN检测可以获取目标散射点的幅度和距离信息,但为了方便说明跟踪过程,本文中的“量测”均指距离,即表示该距离单元处可能存在目标. ...
People tracking with UWB radar using a multiple-hypothesis tracking of clusters (MHTC) method
3
2010
... 在多人目标跟踪方面,Choi等[12 ] 实现了对不同目标的检测,未对轨迹进行关联和划分. 刘金超[16 ] 运用联合概率数据互联算法(joint probabilistic data association,JPDA)实现了轨迹交叉情况下的多目标跟踪,但没有对目标初始状态的确定进行说明,只跟踪了速度反向、轨迹只交叉一次的情况. Chang等[17 ] 运用多假设跟踪算法(multiple-hypothesis tracking,MHT)实现了目标数量可变的跟踪,但实验是在室外空旷环境进行的,对于室内多杂波的情况,可能会导致计算量爆炸. ...
... 传统CLEAN算法的输入是波形模板和预处理后的雷达帧,通过互相关和阈值对比搜索最大值. 与恒虚警类检测器相比,CLEAN算法既保留了目标信息,也避免了目标遮蔽,被认为是人体目标检测更有效的手段[16 -17 , 19 ] . CLEAN算法逻辑如图2 所示. ...
... 关于波形模板和阈值的选择,详见文献[17 , 19 ],此处不作展开. 由于本研究的输入是基带雷达帧,波形模板要作同样的处理,整个CLEAN过程建立在基带信号上. 人体目标在行走过程中,身体各部分的运动幅度以及与雷达的相对观测角度都在不断发生变化,因此即便是同一个目标,在每次检测中,得到的散射点数也可能不同,但往往集中在1~3个[16 , 19 ] . 基带CLEAN检测可以获取目标散射点的幅度和距离信息,但为了方便说明跟踪过程,本文中的“量测”均指距离,即表示该距离单元处可能存在目标. ...
2
... 考虑到AAL系统的主要面向对象为空巢老年人,一户人家通常不超过2位,活动监测范围限制在室内. 为了结合目标跟踪和AAL系统达到工程化应用的目的,本文在前人工作的基础上,提出基于超宽带雷达基带信号的多人目标跟踪方法. 该方法对采集到的射频回波进行下变频和抽取,通过动目标指示(moving target indication,MTI)[18 ] 去除杂波,采用基带CLEAN检测提取得到目标散射点. 使用凝聚和跳窗方法确定目标个数及初始状态,利用JPDA和卡尔曼滤波(Kalman filter,KF)[16 , 19 -20 ] 进行关联与跟踪. 在实验室、过道和休息厅3种室内环境下进行实测实验,计算得到该方法对多人目标跟踪的准确度,验证利用该方法能够更快地完成目标检测,减少了数据存储空间. ...
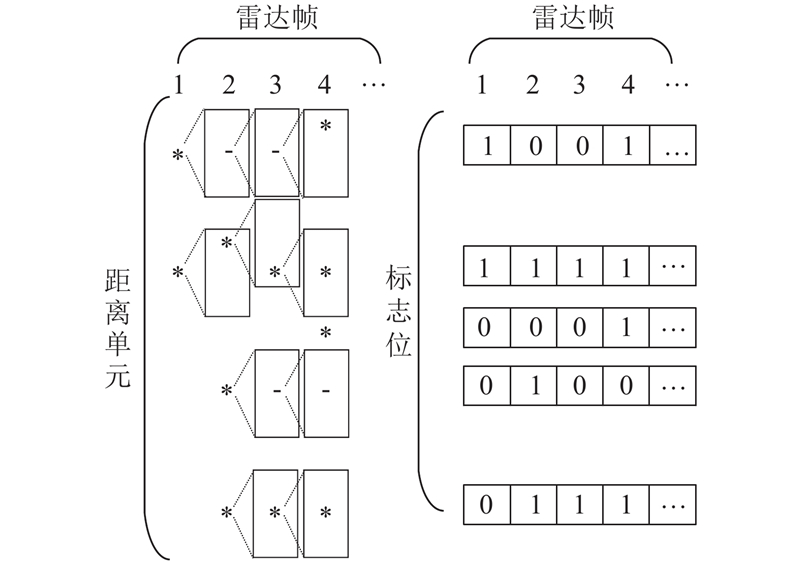
... 回波信号经过采样被存储为数字形式,这称为1次雷达扫描,或叫作1个雷达帧,用 $ s\left[n\right] $ $ n $ $ M $ $ s\left[n,m\right] $ $ m $ n 个距离单元处的信号强度[18 ] . ...
Location detection and tracking of moving targets by a 2D IR-UWB radar system
5
2015
... 考虑到AAL系统的主要面向对象为空巢老年人,一户人家通常不超过2位,活动监测范围限制在室内. 为了结合目标跟踪和AAL系统达到工程化应用的目的,本文在前人工作的基础上,提出基于超宽带雷达基带信号的多人目标跟踪方法. 该方法对采集到的射频回波进行下变频和抽取,通过动目标指示(moving target indication,MTI)[18 ] 去除杂波,采用基带CLEAN检测提取得到目标散射点. 使用凝聚和跳窗方法确定目标个数及初始状态,利用JPDA和卡尔曼滤波(Kalman filter,KF)[16 , 19 -20 ] 进行关联与跟踪. 在实验室、过道和休息厅3种室内环境下进行实测实验,计算得到该方法对多人目标跟踪的准确度,验证利用该方法能够更快地完成目标检测,减少了数据存储空间. ...
... 实际上,由于室内存在其他相对静止的物体,例如墙壁、桌子、书柜等,超宽带雷达接收到的回波中将包含很多静杂波,对目标检测造成干扰. 杂波滤除主要有简单平均法、背景消除法和基于统计的方法[16 , 19 ] . 在脉冲雷达中,更常用的方法是MTI. 通过雷达帧间差分,即 ...
... 传统CLEAN算法的输入是波形模板和预处理后的雷达帧,通过互相关和阈值对比搜索最大值. 与恒虚警类检测器相比,CLEAN算法既保留了目标信息,也避免了目标遮蔽,被认为是人体目标检测更有效的手段[16 -17 , 19 ] . CLEAN算法逻辑如图2 所示. ...
... 关于波形模板和阈值的选择,详见文献[17 , 19 ],此处不作展开. 由于本研究的输入是基带雷达帧,波形模板要作同样的处理,整个CLEAN过程建立在基带信号上. 人体目标在行走过程中,身体各部分的运动幅度以及与雷达的相对观测角度都在不断发生变化,因此即便是同一个目标,在每次检测中,得到的散射点数也可能不同,但往往集中在1~3个[16 , 19 ] . 基带CLEAN检测可以获取目标散射点的幅度和距离信息,但为了方便说明跟踪过程,本文中的“量测”均指距离,即表示该距离单元处可能存在目标. ...
... , 19 ]. 基带CLEAN检测可以获取目标散射点的幅度和距离信息,但为了方便说明跟踪过程,本文中的“量测”均指距离,即表示该距离单元处可能存在目标. ...
1
... 考虑到AAL系统的主要面向对象为空巢老年人,一户人家通常不超过2位,活动监测范围限制在室内. 为了结合目标跟踪和AAL系统达到工程化应用的目的,本文在前人工作的基础上,提出基于超宽带雷达基带信号的多人目标跟踪方法. 该方法对采集到的射频回波进行下变频和抽取,通过动目标指示(moving target indication,MTI)[18 ] 去除杂波,采用基带CLEAN检测提取得到目标散射点. 使用凝聚和跳窗方法确定目标个数及初始状态,利用JPDA和卡尔曼滤波(Kalman filter,KF)[16 , 19 -20 ] 进行关联与跟踪. 在实验室、过道和休息厅3种室内环境下进行实测实验,计算得到该方法对多人目标跟踪的准确度,验证利用该方法能够更快地完成目标检测,减少了数据存储空间. ...
A 118-mW pulse-based radar SoC in 55-nm CMOS for non-contact human vital signals detection
1
2017
... 常用的超宽带雷达分为连续波体制(FMCW)和极窄脉冲体制(IR)两大类,后者具有穿透性强、功耗低、抗多径等特点,更适合引入室内AAL系统,因此本研究所讨论的超宽带雷达都基于极窄脉冲体制. 发射的脉冲波形可以有多种形式,其中频移高斯脉冲具有相对良好的频谱分布且容易在CMOS上实现,在工程上更常应用[6 , 21 ] . 归一化的频移高斯脉冲可以表示为 ...
Evaluation of an ultra-wide-band propagation channel
1
2002
... 其中 ${f}_{{\rm{B}}}$ $ f\left(t\right) $ $ h\left(t\right) $ [22 -23 ] 来描述: ...
Prediction and modeling for the time-evolving ultra-wideband channel
1
2007
... 其中 ${f}_{{\rm{B}}}$ $ f\left(t\right) $ $ h\left(t\right) $ [22 -23 ] 来描述: ...
1
... 不同于呼吸检测、动作识别、步态识别等依赖微多普勒特征的应用场景,目标跟踪更关心的是整个人体的平动,而非身体各个散射点的细节,因此过高的距离分辨率对存储空间和处理计算带来了不必要的浪费. 在接收端可以对回波信号进行下变频,提取出基带信号,即 $ h\left(t\right) $ . 在满足采样定理的条件 下,对基带信号按照一定比例进行抽取,在减少数据量的同时,不会丢失信息[24 -25 ] . 上述过程的主要步骤如下. 1)读取原始雷达帧;2)给每个原始雷达帧乘上 ${{\rm{exp}}}\;({-{\rm{j}}{\omega }_{{\rm{c}}}n)}$
1
... 不同于呼吸检测、动作识别、步态识别等依赖微多普勒特征的应用场景,目标跟踪更关心的是整个人体的平动,而非身体各个散射点的细节,因此过高的距离分辨率对存储空间和处理计算带来了不必要的浪费. 在接收端可以对回波信号进行下变频,提取出基带信号,即 $ h\left(t\right) $ . 在满足采样定理的条件 下,对基带信号按照一定比例进行抽取,在减少数据量的同时,不会丢失信息[24 -25 ] . 上述过程的主要步骤如下. 1)读取原始雷达帧;2)给每个原始雷达帧乘上 ${{\rm{exp}}}\;({-{\rm{j}}{\omega }_{{\rm{c}}}n)}$
People counting based on an IR-UWB radar sensor
1
2017
... 传统的点目标跟踪理论主要包括航迹起始、数据关联和跟踪滤波3部分. 在实际目标数目在过程中保持不变的前提下,针对检测得到的量测,要确定各目标的初始航迹并进行跟踪预测,对下一时刻的量测进行数据关联并滤波,从而形成稳定的跟踪轨迹. 对于超宽带雷达下的人体目标跟踪,基带CLEAN检测降低了距离扩展性,但每个目标仍可能有多个量测. 若采用传统点目标的跟踪方法,则会产生目标分裂和虚假航迹,后续数据关联的计算量大幅增加. 本文在检测簇[26 ] 和逻辑法航迹起始[13 ] 的基础上,提出基于凝聚和跳窗的状态起始法,旨在辨识来源于同一个人体目标的多个量测的同一性,快速、稳定地确定目标个数和起始航迹. 量测本身是无标识的,但来自于同一个目标的量测,在距离单元上表现得比较集中,因此凝聚时采用欧式距离作为相似度度量方式. 在凝聚之前对每1帧的所有量测进行从小到大排序,将每个量测作为一类;从前往后开始遍历,对类间距处在阈值内的所有类合并为新类,取平均值作为新的量测. 凝聚的伪代码如下. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}