

信息物理融合系统(cyber-physical systems, CPS)是计算单元与物理对象在网络空间中高度融合而成的智能系统,已广泛应用于智能电网、智慧医疗、工业控制等领域[1-3]. CPS与工业控制融合而产生的工业信息物理融合系统(industry cyber-physical system, ICPS)由于在优化生产方式、提高生产效率、精简生产流程等方面的优势,成为工控领域的新宠[4-5],典型代表即工业4.0. ICPS在提高生产效率和智能维护水平的同时,面临着众多亟待解决的问题,其中开放网络环境面临的网络攻击与恶劣工业环境导致的物理器件故障都成为ICPS安全运行和未来发展的掣肘[6-7]. 此外,ICPS更强大的感知能力、更多数据传输及智能决策,与有限计算、通讯资源间的矛盾日益突出.
就网络空间安全问题而言,ICPS面临的各类网络攻击是最大威胁,具有时空隐蔽性的虚假数据注入(false data injection, FDI)攻击通过协同篡改传感器量测与控制器指令数据,或使控制中心做出误导性决策,或使被控对象接收到错误控制指令,最终导致整个系统性能下降或崩溃. 因为FDI攻击的高隐蔽性特点,对系统的危害更大且更难防范. 目前应对FDI攻击的研究有2类:一类是采用信息安全领域中加密、解密的方法来保护数据[8-9],但复杂的加密、解密算法需要一定的运行时间,这对于实时性要求较高的ICPS不适宜;另一类是从控制角度出发应对FDI攻击,主要包括攻击检测[10-11]、容侵控制[12-13],已有成果更多关注攻击检测问题,对攻击防御、系统性能及资源节约等的综合考虑不足.
就物理系统故障而言,由于网络化控制系统(networked control system, NCS)本质上是ICPS的具体应用形式,ICPS物理故障问题的解决可以借鉴NCS相关容错控制方法. 目前就NCS容错控制已有不少成果,根据不同通讯机制和容错控制方式的常用分类方法,可以归结为周期时间触发通讯机制与离散事件触发通讯机制(discrete event triggered communication scheme,DETCS)下的被动容错[14-15]、主动容错[16-17]及主-被动混合容错控制[18-19]等. 已有NCS容错研究大多假设通信网络是可靠的,忽视了网络攻击的潜在危害. 在实际ICPS中,故障与攻击的共存是无法回避的,本文研究如何确保系统在该情形下安全、可靠运行.
针对故障与攻击共存的ICPS综合安全控制问题,目前已有一些初步成果. 基于智能广义预测控制及鲁棒控制方法,Yaseen等[20-21]研究故障主动容错、FDI攻击被动防御策略. 针对状态依赖FDI攻击与多重执行器故障共存的CPS,Ye等[22]利用自适应控制方法,研究故障主动容错、攻击主动防御的策略,但未考虑CPS有限网络资源约束. 史娅红[23]在文献[21]的基础上,除对故障主动容错外,还研究了执行侧攻击主动容侵、传感侧攻击被动容侵的主-被动混合容侵策略. 在文献[21, 23]中,估计器均置于智能传感单元的事件发生器之前,因此须对系统所有采样时刻状态、故障及攻击进行实时估计,这会使一般的智能传感器件难堪重负. 估计器所处的位置使得估计结果在经由传感侧网络传输时,再次会被攻击者篡改,从而削弱安全防御的实效. 将估计器位置移至事件发生器之后的控制单元,通过计算资源的合理分配与高效利用,更有效地实现故障主动容错、双侧网络FDI攻击主动容侵与通讯协同设计,是本研究的主要内容.
综上所述,本研究将对同时存在双侧网络FDI攻击与执行器故障的ICPS,以主动防御FDI攻击为出发点,综合考虑通讯、计算资源的高效利用,构建DETCS下的ICPS综合安全控制架构. 在统一的非均匀传输模式下,借助时滞系统理论及仿射Bessel-Legendre不等式等少保守技术,推证出ICPS鲁棒估计器、综合安全控制与通信协同设计方法,以期实现ICPS安全运行与通讯折中平衡的目标.
1. 问题描述
1.1. 系统架构及数据传输过程
在DETCS下,构建如图1所示的ICPS综合安全控制与通讯协同设计架构.
图 1
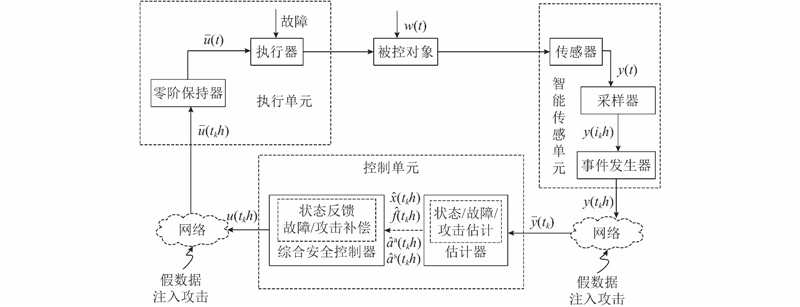
从图1可知,该系统主要包括被控对象、智能传感单元、控制单元、执行单元以及传感侧与执行侧通信网络. 日趋开放、多样性的网络使得ICPS在遭受隐蔽性网络攻击时致使其失控或崩溃的威胁更大. ICPS长时间工作在高温、高压或具有腐蚀性的环境中,作为控制信息与受控对象物理连接的执行器更易发生故障,因此考虑FDI攻击与执行器故障共存的情形.
智能传感单元主要包括传感器、采样器及事件发生器. 采样器对传感器量测值进行等周期
控制单元主要包括估计器、综合安全控制器. 估计器基于满足事件触发条件,由传感侧网络传来的数据对系统状态、故障与攻击进行实时估计. 综合安全控制器基于估计结果,根据预先设计好的控制算法计算相应的控制量,将该控制量经由执行侧网络送至执行单元. 可见,无论是估计值还是控制量的计算,均以非均匀周期方式进行.
执行单元主要包括零阶保持器(ZOH)和执行器. ZOH对传输至此的控制量进行非均匀周期保持,将保持结果传输至执行器中,执行器将该控制量作用于被控对象.
1.2. 系统描述
考虑如下具有执行器故障、FDI攻击以及外部扰动的连续时间被控对象:
式中:
在ICPS中,一方面,考虑执行器故障发生于物理器件,FDI攻击来自于信息网络,二者的生成源有本质的差异. 另一方面,不同作用部位的FDI攻击的目的和对系统的影响机理各具特征. 可以作出如下假设.
假设1 执行器故障与双侧网络FDI攻击具有可检测、可分离性.
受文献[24]的启发,设计如下触发条件来判断当前量测采样值是否需传输:
式中:
从以上事件触发条件的描述可知,经事件发生器筛选后的量测采样数据,将以非均匀周期方式传输,且传输间隔为
考虑到被控对象是连续的,传感与控制单元均通过数字量计算来实现,且经过筛选的数据,无论是估计、控制还是传输,都是以非均匀周期方式开展,因此构建的ICPS安全架构是典型的非均匀采样数据系统. 对于此类系统的分析与综合,优选方法为时滞系统分析理论[26],须将非均匀采样或非均匀传输对系统的影响转换为时延.
注2 事件触发机制的应用、5G技术的普及以及计算机CPU处理性能的显著提升,不再考虑网络传输时延、数据包丢失及计算时延等.
对于非均匀的传输问题,定义如下时延函数:
事件触发机制的最大传输间隔小于等于某一常数
该ICPS执行与传感双侧网络中均存在FDI攻击的威胁,故有
式中:
假设2 假设攻击后的系统是能控且能观测的.
2. 鲁棒估计器设计
根据传输至控制单元的输出量测采样值,设计鲁棒估计器,对连续时变故障、双侧网络FDI攻击及系统状态进行准确估计. 利用控制单元内置的ZOH,对量测采样输出进行零阶保持. 由于ICPS不再考虑数据包丢失、网络传输时延,零阶保持间隔与1.2节所描述图1中的ZOH保持间隔一致.
根据式(3)定义的时延函数,将式(4)转化为如下形式:
式中:
为了便于估计,将执行器故障、双侧网络FDI攻击増广为一个向量,称为“増广故障向量”,则由式(1)、(5)可得如下的系统描述:
式中:
设计如下估计器:
式中:
定义:
为了便于分析,将
式中:
对于动态误差系统(9)中故障的导数
定理1 给定标量
式中:
式中:
其中
考虑动态误差系统(9)的稳定性. 在零初始条件下,令
对于式(13)中的积分项:
式中:
令
式中:
可得
式中:
若
在零初始条件下,当
将式(15)代入式(17),令
式中:
可得
式中:
由线性凸组合理论[29]可知,
矩阵不等式(19)是非线性的,无法直接利用LMI工具箱求解,须利用变量替换法,将其转化为线性矩阵不等式. 令
对式(17)从
由此可得
即
至此定理证毕.
注3 相比于邱爱兵等[27]构造的Lyapunov泛函,在构造Lyapunov泛函时增加了
3. 综合安全控制器设计
基于得到的系统状态及増广故障(执行器故障、执行侧和传感侧网络FDI攻击)估计结果,给出有针对性的执行器故障与双侧网络FDI攻击主动容错、主动容侵与通讯协同设计方法.
根据假设1可知,执行器故障与双侧网络FDI攻击具有可分离性,考虑到双侧网络中的FDI由于攻击的对象与位置不同,对系统的影响不同,因此综合安全控制器对双侧网络中的FDI攻击应采用更有针对性的防御策略,可以通过以下2种方式进行主动防御.
1)对于传感侧网络FDI攻击,可以直接在増广故障估计结果中将估计值
2)对于执行侧网络FDI攻击,借鉴故障调节的思想,采用基于估计与补偿的主动防御策略,即主动容侵.
对执行器故障采用基于估计与补偿的主动调节方式,即对执行器故障主动容错.
根据状态及増广故障估计向量
式中:
由1.2节关于ZOH更新方式的描述以及式(3)定义的时延函数
结合式(1)、(4)及(24),可得如下闭环模型:
注5 式(25)中,
定理2 对于给定的标量
式中:
考虑定理2的证明过程与定理1类似,限于篇幅,此处不再赘述.
4. 仿真实验与结果分析
4.1. 数值仿真
通过如式(1)所示的数值仿真算例,验证所提方法的有效性. 选取系统仿真参数如下:
当系统未施加故障与攻击时,特征根分别为:
假设执行器发生的连续时变故障为
执行侧和传感侧网络FDI攻击分别为
选取系统输出传感器量测值的采样周期
选取
根据
选取
图 2
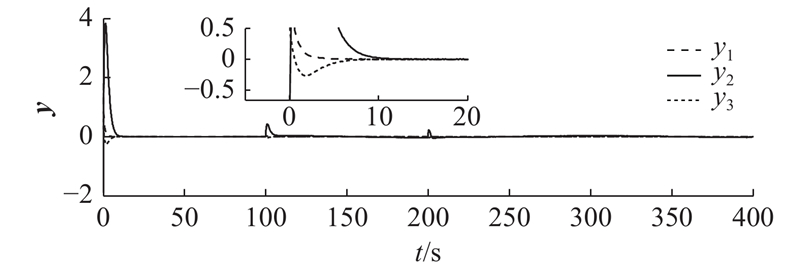
图 3
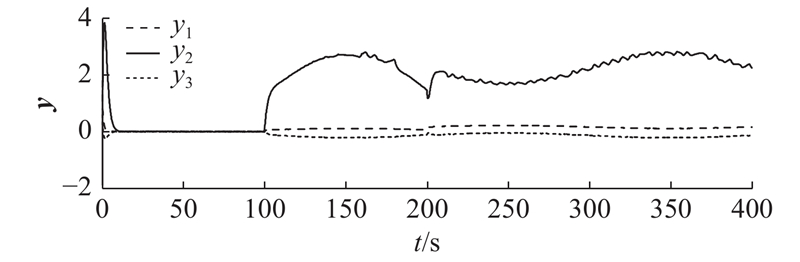
图 3 基于无容错/容侵能力方法的系统输出曲线
Fig.3 System output curve based on method of no fault and attack tolerant ability
从图2可得如下结论.
(1)当
2)当
3)当
从图3可以看出,当
综上结果可以看出,即使原系统不稳定,无论是否存在异常(故障、攻击)以及外部扰动,采用所设计的综合安全控制器均可以使ICPS稳定,能够主动有效应对故障与攻击对系统的影响,且具有期望的
4.2. 四容水箱仿真实验
4.2.1. 实例描述
通过具体的四容水箱实例来验证所提方法的有效性,实例中的相关参数与文献[27]所选的参数相同.
针对双侧网络中存在的FDI攻击,假设攻击者对每个传感器或执行器通道注入相同大小的攻击量,且攻击量为连续时变的,即
且
所选传感器的采样周期
4.2.2. 状态、故障及攻击估计实验研究
选择
图 4
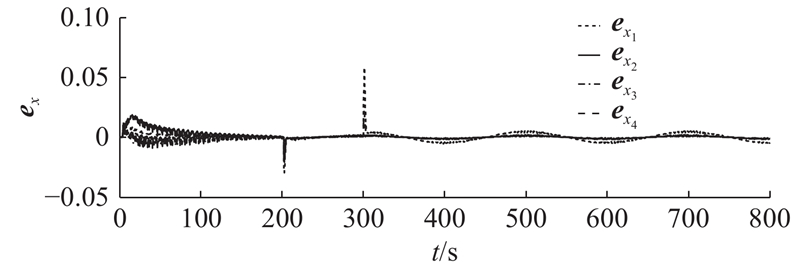
图 5
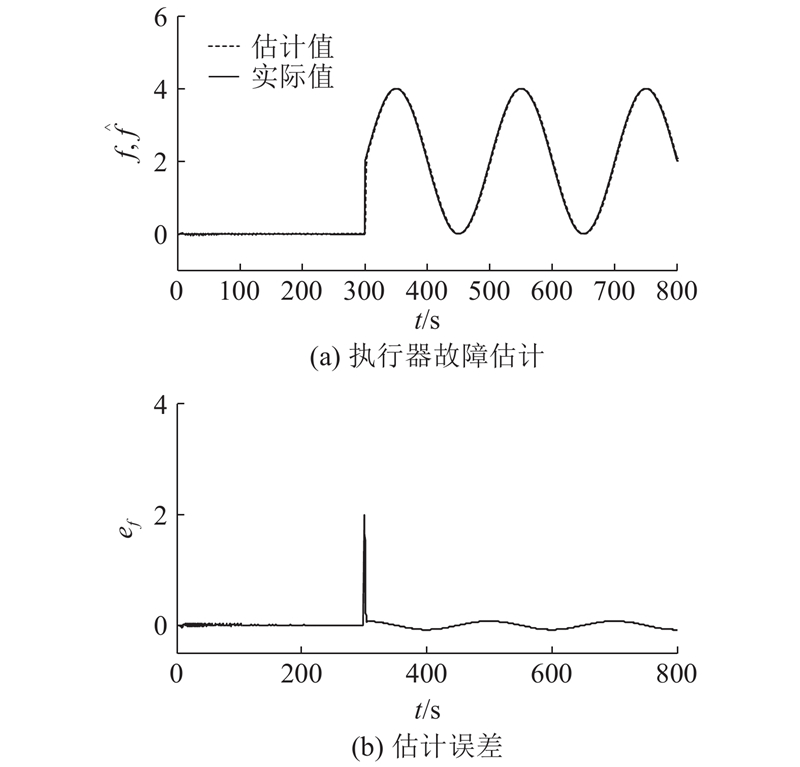
图 6
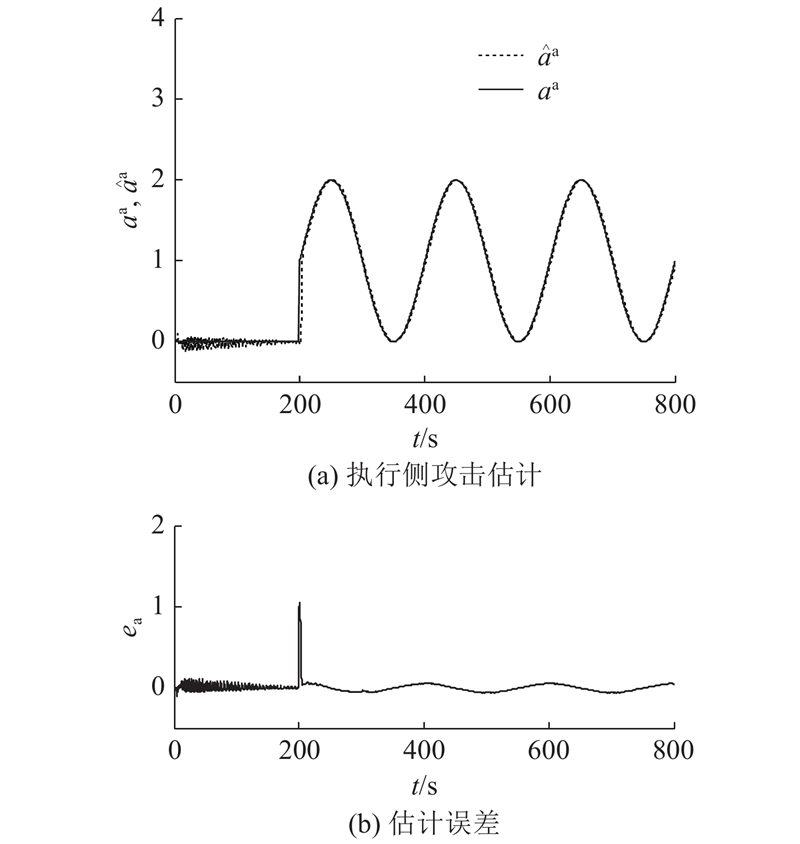
图 6 执行侧攻击估计及估计误差
Fig.6 Estimation of actuating side attack and its estimation error
图 7
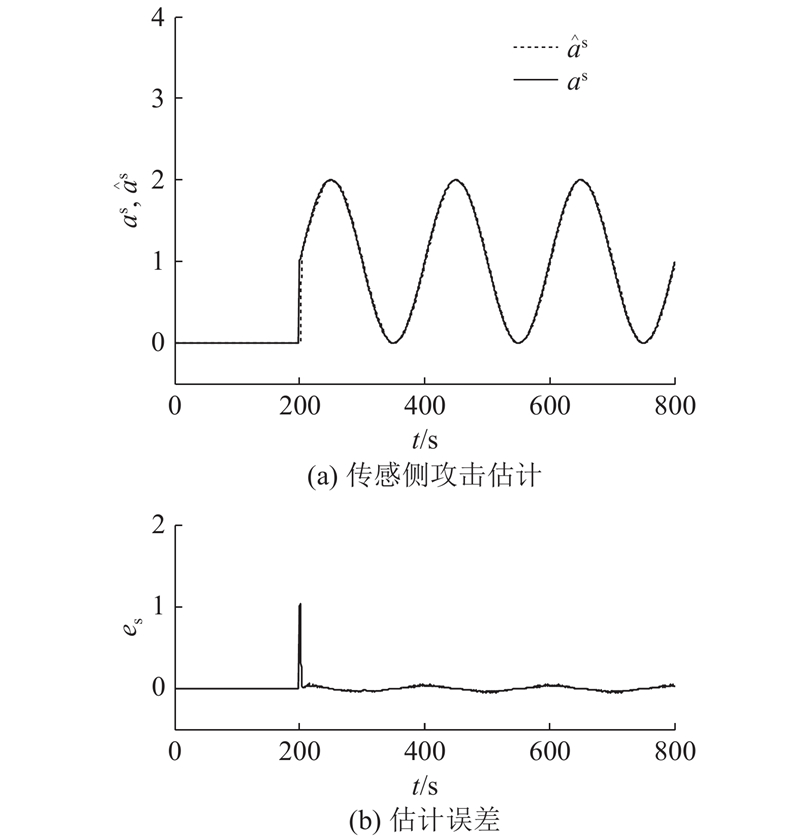
图 7 传感侧攻击估计及估计误差
Fig.7 Estimation of sensing side attack and its estimation error
1)当
综上可知,设计的鲁棒估计器对系统状态、连续时变故障及双侧网络中的FDI攻击均可以快速、准确地估计,且具有较强的鲁棒性,这为综合安全控制器的设计奠定了基础.
为了验证所得结果的少保守性,考虑到利用仿射Bessel-Legendre不等式处理泛函导数项的少保守性优势在文献[28]中得到证明,此处不再赘述. 仅就构造的Lyapunov泛函(即较文献[27]增加了
4.2.3. 综合安全控制实验研究
根据
选取
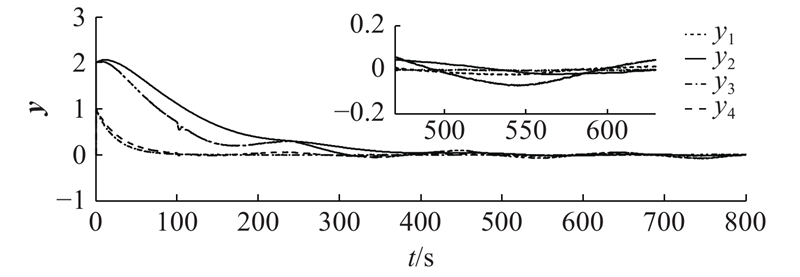
如图8所示为利用该方法设计的综合安全控制器,即采用式(23)的执行器故障主动容错、执行与传感侧FDI攻击主动容侵控制时的系统输出曲线,可得如下结论.
图 8
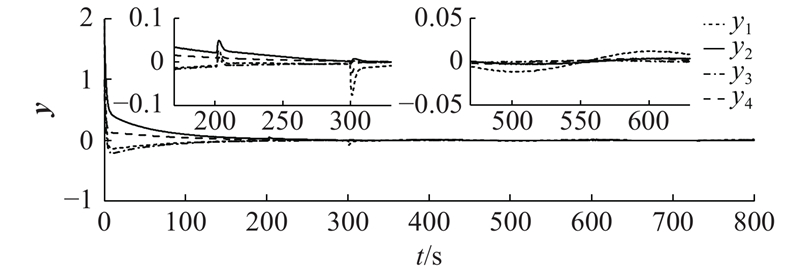
1)当
2)当
3)当
综上可知,设计的综合安全控制器可以使得ICPS在执行器故障、FDI攻击共存时,均以较小的误差收敛于平衡位置,且对外部扰动具有较强的鲁棒性,说明利用提出的方法可以有效地应对物理系统故障、FDI攻击及扰动对系统的影响,具有较高的安全可靠性.
图 9
对于通讯资源,图10给出DETCS下,在仿真时间800 s内的数据发送时刻及发送间隔Δt情况.
图 10
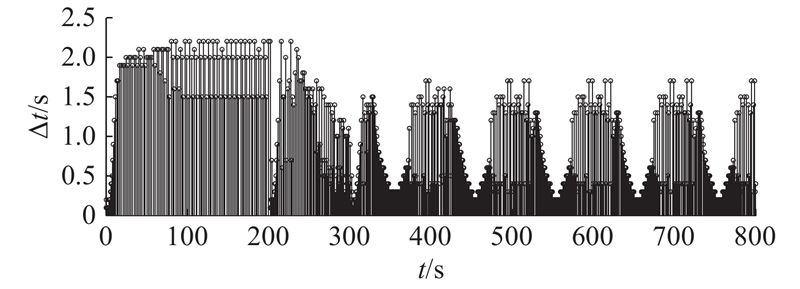
图 10 DETCS下的数据发送时刻与传输间隔
Fig.10 Data transmission instant and its period under DETCS
5. 结 论
(1)从主动防御执行和传感双侧网络FDI攻击着眼,通过对计算资源与通讯资源的合理分配与有效利用,在DETCS下构建ICPS综合安全控制架构. 将估计器与综合安全控制器的设计统一于同一非均匀数据传输机制下,为利用时滞系统理论对ICPS进行分析与设计提供了便利.
(2)将故障与攻击増广为同一向量,设计相应的鲁棒估计器,实现了状态、执行器故障及双侧FDI攻击及时、准确的估计,具有较强的鲁棒性;基于筛选后的量测输出值作估计,节约了计算资源.
(3)基于估计结果,提出传感侧攻击的分离防御、执行侧攻击以及执行器故障补偿的综合安全控制策略,有效实现了攻击、故障的主动容侵、主动容错与通讯的协同优化与折中.
当系统中故障与攻击共存不具有可分离性时,如何检测故障与攻击的存在、如何设计相应的综合安全控制策略来防御攻击与故障对系统的影响等将是进一步的研究方向.
参考文献
A comprehensive overview of cyber-physical systems: from perspective of feedback system
[J].DOI:10.1109/JAS.2016.7373769 [本文引用: 1]
云边智能: 电力系统运行控制的边缘计算方法及其应用现状与展望
[J].
Cloud-edge intelligence: status quo and future prospective of edge computing approaches and applications in power system operation and control
[J].
Design techniques and applications of cyber physical systems: a survey
[J].DOI:10.1109/JSYST.2014.2322503 [本文引用: 1]
工业网络系统的感知-传输-控制-体化: 挑战和进展
[J].DOI:10.3969/j.issn.1003-8930.2019.01.005 [本文引用: 1]
Towards the integration of sensing, transmission and control for industrial network systems: challenges and recent developments
[J].DOI:10.3969/j.issn.1003-8930.2019.01.005 [本文引用: 1]
孙优贤院士论工业信息物理融合系统
[J].
Academician Sun You-xian on the physical integration system of industrial information
[J].
Safety and security in cyber-physical systems and internet-of-things systems
[J].DOI:10.1109/JPROC.2017.2781198 [本文引用: 1]
信息物理融合系统综合安全威胁与防御研究
[J].
Integrated security threats and defense of cyber-physical systems
[J].
Coding schemes for securing cyber-physical systems against stealthy data injection attacks
[J].
Logarithmic encryption scheme for cyber–physical systems employing Fibonacci Q-matrix
[J].
Attack detection and identification in cyber-physical systems
[J].DOI:10.1109/TAC.2013.2266831 [本文引用: 1]
采用多尺度主成分分析的控制系统欺骗攻击检测
[J].
Deceptive attack detection of control system using multi-scale principal component analysis
[J].
A survey on security control and attack detection for industrial cyber-physical systems
[J].DOI:10.1016/j.neucom.2017.10.009 [本文引用: 1]
Event-triggered secure observer-based control for cyber-physical systems under adversarial attacks
[J].DOI:10.1016/j.ins.2017.08.057 [本文引用: 1]
Reliable fuzzy control for a class of nonlinear, networked control systems with time delay
[J].
To transmit or not to transmit: a discrete event-triggered communication scheme for networked Takagi–Sugeno fuzzy systems
[J].
Adaptive stabilization of networked control systems tolerant to unknown actuator failures
[J].DOI:10.1080/00207720903308975 [本文引用: 1]
基于离散事件触发通信机制的非均匀传输网络化控制系统故障调节与通信满意协同设计
[J].
Satisfactory integrated design between failure accommodation and communication for non-uniform transmission networked control system under discrete event-triggered communication scheme
[J].
A hybrid active–passive fault–tolerant control approach
[J].
事件触发非均匀传输NCS少保守性鲁棒
Active optimization choice of NCS less conservative robust
Cyber-attack detection with fault accommodation based on intelligent generalized predictive control
[J].DOI:10.1016/j.ifacol.2017.08.111 [本文引用: 1]
Research on secure control and communication for cyber-physical systems under cyber-attacks
[J].DOI:10.1177/0142331219826658 [本文引用: 8]
A co-design methodology for cyber-physical systems under actuator fault and cyber attack
[J].DOI:10.1016/j.jfranklin.2019.01.009 [本文引用: 1]
Event-triggered communication and control co-design for networked control systems
[J].DOI:10.1016/j.automatica.2013.01.038 [本文引用: 1]
Event-triggered decentralized dynamic output feedback control for LTI systems
[J].DOI:10.3182/20120914-2-US-4030.00057 [本文引用: 2]
A refined input delay approach to sampled-data control
[J].DOI:10.1016/j.automatica.2009.11.017 [本文引用: 1]
非均匀采样数据系统时变故障估计与调节最优集成设计
[J].
Optimal integrated design of time-varying fault estimation and accommodation for noun uniformly sampled data systems
[J].
Affine Bessel–Legendre inequality: application to stability analysis for systems with time-varying delays
[J].DOI:10.1016/j.automatica.2018.03.073 [本文引用: 3]
Reciprocally convex approach to stability of systems with time-varying delays
[J].DOI:10.1016/j.automatica.2010.10.014 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}