

目前关于换道决策的建模研究已有较多的研究成果. 起初换道决策模型是用于进行微观交通流仿真模型的研究,最早提出的针对换道决策行为的建模方法是基于规则的方法. 由Gipps[3]在1986年提出的一种基于规则的换道决策模型,主要从换道行为的必要性、倾向性和安全性三方面进行考虑,并为多种影响因素制定了不同的优先级规则,由此进行换道行为判断,但未给出严密的模型参数估计方法,并且固定规则没有考虑到驾驶员行为特征之间的随机性差异. Yang等[4]对固定规则的换道决策模型进行了改进,引入了换道概率因素,提高了模型的灵活性. Ahmed[5]提出了一种基于效用选择理论的概率模型,分换道意图产生、车道选择和是否接受换道后的间距三步判断换道行为,采用概率表达的形式对换道条件进行描述. Toledo等[6]深入研究了效用选择概率模型,提出了一种强制性换道和自主性换道相统一的换道决策模型,该模型具有严密的理论基础,但模型过于复杂,而导致参数标定困难. 虽然这些研究取得了一定的成果,但大多数模型在进行换道可行性分析时仍是基于相对速度或距离阈值进行的判断,无法对驾驶员的换道决策行为进行精确建模,并且难以挖掘出潜在的换道决策影响因素. 近年来应用广泛的机器学习方法能够很好地捕捉到隐性关系,利用机器学习建模的方法逐渐在换道决策研究领域得到应用. Schubert等[7]提出通过贝叶斯网络(Bayesian networks)根据周围交通情况建立模型对换道行为的合理性进行评估. Wang等[8]采用支持向量机(support vector machines,SVM)模型对车辆换道行为进行预测. Motamedidehkordi等[9]引入了集成学习方法随机森林(random forest,RF)对换道决策行为进行建模. Díaz-Álvarez等[10]建立了基于神经网络的换道决策模型.
上述换道决策模型大多数关注强制性换道的决策行为建模,忽略了在驾驶过程中出现更为频繁的自由换道行为. 此外,对换道决策行为的预测精度还有待进一步提高. 因此,本文引入一种融合换道决策模型对自由换道决策行为进行建模,以进一步提升模型的预测准确率. 首先介绍融合换道决策模型的理论基础,描述数据处理及提取的过程,并对车辆换道决策变量进行分析计算,进行融合换道决策模型与常用的换道决策模型的预测效果对比,最后通过对特征变量组合进行实验讨论与分析得出结论.
1. 基于梯度提升决策树的车辆换道融合决策模型
车辆换道决策场景是具有代表性的二分类情况,驾驶员在行驶中根据车辆周围环境判断是否执行车道变换. 梯度提升决策树(gradient boosting decision tree,GBDT)是一种广泛应用于回归与分类任务的机器学习方法,以弱学习器(通常是决策树)的集合形式产生预测模型,通过迭代方式将较弱的学习器组合成一个较强的学习器[11]. 其中每一棵决策树的建立都是为了减少之前模型的残差,使得残差向梯度方向减小,在逐次的迭代中使得残差不断减小. 在GBDT的迭代过程中,后一轮迭代的目标是找到一个CART回归树模型的弱学习器,去拟合之前模型的残差,使得前一轮迭代产生的模型与本轮模型相加得到的输出值与真实值之间的损失尽量变得更小,最终将所有迭代产生的模型累加得到最终的预测模型.
2014年Facebook公司的He等[12]在研究中发现GBDT能够自动发掘出多种可区分的特征及特征组合,可以将其中各棵子树上样本的划分路径作为其他模型的输入特征进行使用,极大地简化了人工进行特征筛选与组合的工作.
逻辑斯蒂回归模型[13](logistic regression,LR)是一种在工业领域应用广泛的二分类模型,其在线性回归的基础上,在特征到结果的映射中加入了一层sigmoid函数映射,将预测值限定在[0,1],可以输出不同类别的概率. 设y为车辆的换道行为标记,y=1表示车辆执行了换道行为,y=0表示车辆未执行换道行为,
式中:
常采用梯度下降法求取参数
图 1
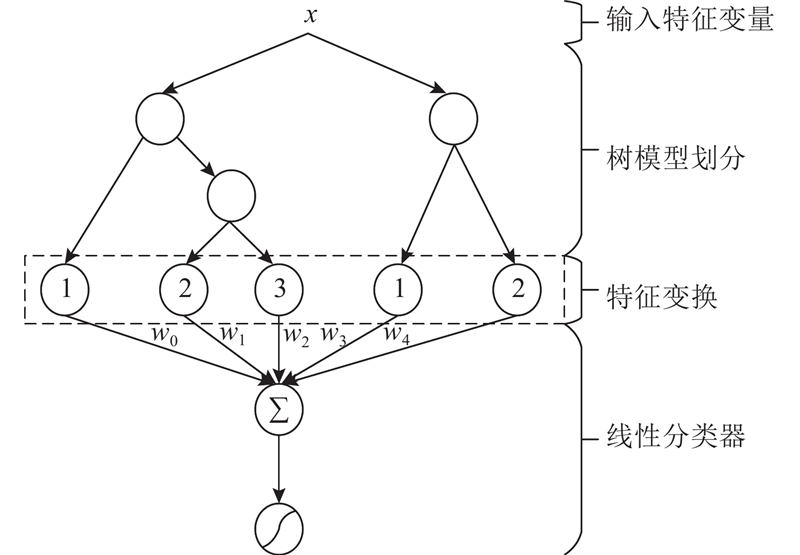
图 1 基于梯度提升决策树(GBDT)的融合决策模型结构图
Fig.1 Structure diagram of fusion decision model based on gradient boosting decision tree (GBDT)
在融合模型中,将GBDT中的所有子树的每个叶子节点对应LR模型的一维特征. 每棵树经过样本遍历后,即获得了该样本对应的所有LR模型特征. 对样本是否落入叶子节点以0和1进行编码标记,1表示样本最终落入了该叶子节点,0则表示样本没有落入该叶子节点. 例如:图1中的GBDT共有左、右2棵子树:第一棵子树包含3个叶子节点,编号为1、2、3;第二棵子树包含2个叶子节点,编号为1、2. x为一条输入样本,w0、w1、w2、w3、w4分别对应各输入的权重. 样本在遍历完2棵树后,分别落到了2棵树的叶子节点上,假设样本最终在第一棵子树上落到了2号叶子节点上,编码为[0,1,0],在第二棵子树上落到了1号叶子节点上,编码为[1,0],则该样本x对应的LR模型特征编码为[0,1,0,1,0],其中前3个元素对应左子树的叶子节点,后2个元素对应右子树的叶子节点,将这一特征编码送入到LR模型中进行分类.
由GBDT对原始数据进行特征转换后,数据会变得很稀疏. 当GBDT中子数及叶子节点数量过多时,会产生转换后特征维度过大的问题,因而需要在LR模型中加入正则化项来避免过拟合,在融合决策模型中选择的是L2正则化. GBDT模型中包含多个需要确定的超参数,例如树的深度、树的数量以及单棵决策树的最大叶子节点数目,这些超参数的选择将会影响特征转换的结果. 若这些参数的值过大,则会出现组合特征冗余的情况,而当这些参数选择过小时,则会出现组合特征数量太少,影响模型的性能. 本研究在模型性能验证时采用参数寻优方法确定模型的最优参数.
2. 数据提取及处理
2.1. NGSIM数据集介绍
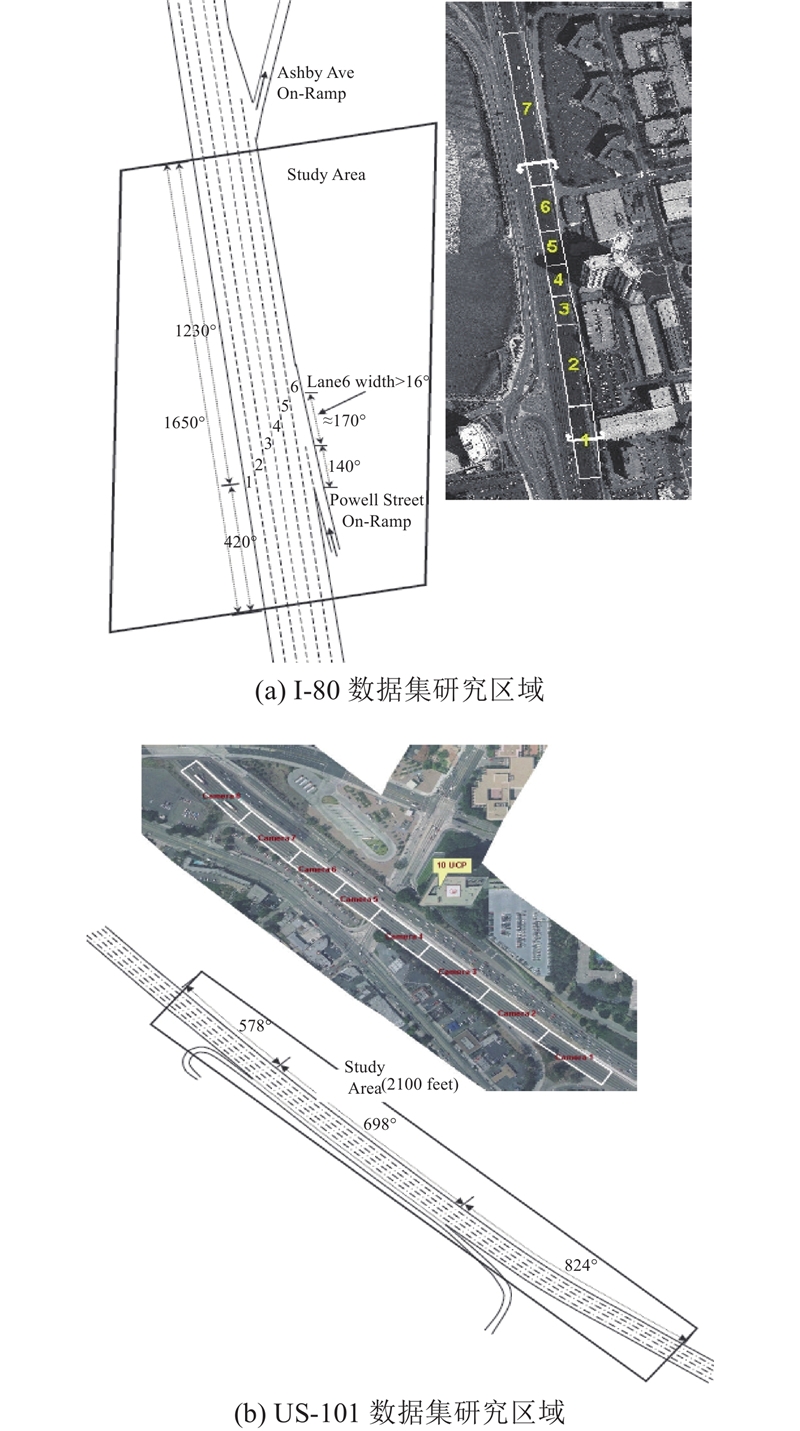
车辆轨迹数据集NGSIM(Next Generation Simulation)包含位于洛杉矶的US-101高速公路车辆轨迹数据集和位于旧金山的I-80洲际公路车辆轨迹数据集[15]. NGSIM数据集通过采用多台高空摄像机捕捉真实的交通流信息得到,摄像机每0.1 s进行1次采样,获取车辆的纵向和横向位置信息,之后通过图像处理的方法获得车辆状态信息,例如:位置、速度、加速度、车辆类型、所处车道等,是广泛应用于车辆轨迹预测研究、车辆换道特性研究的理想数据集. 因此,本文采用NGSIM数据集进行车辆自由换道决策模型研究,划分出训练集和测试集对决策模型进行性能验证. NGSIM数据集研究路段区域如图2所示.
图 2
2.2. 数据预处理
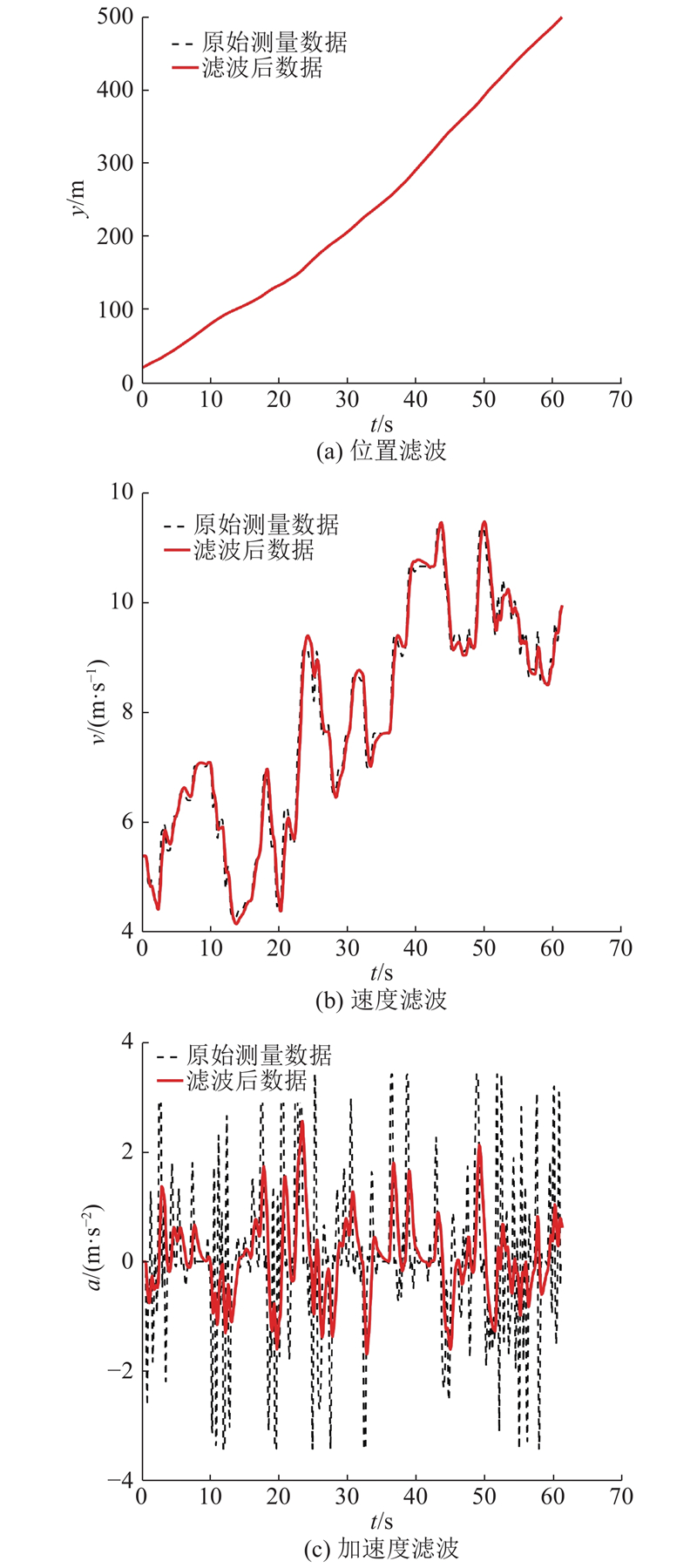
图 3
2.3. 数据筛选
基于NGSIM数据库以合适的方法进行数据筛选,构建车辆自由换道决策行为数据集,具体筛选方式如下.
1)目前在自动驾驶中受关注度更高的车辆类型为小型汽车,因而选择小汽车作为研究的主体车辆,摩托车和卡车类型由于换道方式与小汽车存在差异,筛选数据时不作考虑.
2)NGSIM数据集中的2条道路均包含6个车道,其中1车道为最里侧车道,6车道为车辆汇入汇出车道,2、3、4、5车道为中间车道. 由于在1车道和6车道的换道受到物理边界和过多的外部干扰影响,不纳入自由换道考虑范围,只选用2、3、4、5车道上的车辆进行研究.
3)多次换道行为可能受到较多强制换道因素的影响,跨越多车道换道的行为在过程中受到多个车道交通信息的影响,不适用于建立一般的车辆自由换道决策模型. 本研究对于车辆多次换道及跨越多车道进行换道的行为不作考虑.
4)车辆换道意图开始时刻选择与文献[18]一致,选择主体车辆横向速度大于0.2 m/s的时刻作为换道意图开始时间.
6)借用Yang等[20]提出的数据筛选方法,提取主体车辆换道意图开始时刻前、后5 s内车辆的状态信息进行研究,能够保证较好地覆盖整个车辆换道过程. 综合5)中的筛选方法,本文最终选择提取[ts−5,ts+1]时间段内的车辆状态信息,其中ts为换道意图开始时刻,能够在保留车辆完整换道过程的前提下,进一步精简车辆自由换道决策数据集.
7)对数据集中的样本进行标签化,将执行了换道行为的车辆样本标注为1,作为数据集中的正样本,将没有执行换道行为的车辆样本标注为0,作为数据集中的负样本.
按照上述条件筛选后,从I-80数据集中共提取到共834条样本,其中换道样本有242条,直行样本有592条,从US-101数据集中提取到528条样本,其中换道样本有147条,直行样本有381条. 选择将I-80数据集作为训练集,将US-101数据集作为测试集检验模型的性能.
在实际驾驶环境中,当无换道需求(避让前车、超车等)时,大部分车辆会保持在当前车道直行的状态,提取到的两部分数据集中直行车辆的数量多于换道车辆的数量,符合实际情况下的数据分布情况. 两部分数据集并未出现严重的样本不均衡问题,正、负样本的比例保持在1∶3以内. Estabrooks等[21]对比研究了在多个数据集上不同比例的样本不均衡带来的分类误差影响,结果显示在不同数据集下正、负样本比例为1∶1和1∶5时分类误差很接近,可以认为较小的样本不均衡不会导致分类效果有大的变化. 此外,研究还对比了分别采用过采样和欠采样方法以不同比例对样本进行采样时的分类误差情况。结果显示并非正、负样本比例为1∶1时才会获得最优分类效果. 基于以上分析,本文选择保留原始数据分布比例,未对样本进行均衡处理.
3. 特征选择
3.1. 特征变量计算
车辆自由换道决策行为会受到很多因素的影响,例如当前交通拥堵情况及主体车辆周围的车辆状况信息等. 主体车辆自由换道行为示意图如图4所示.
图 4
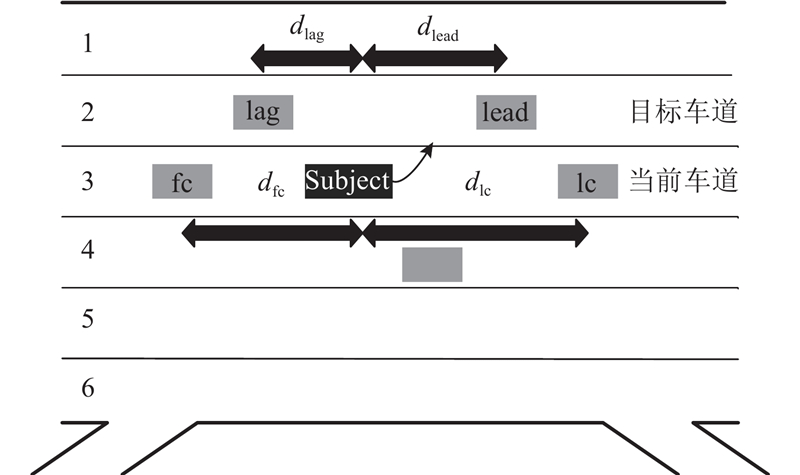
图 4 主体车辆自由换道行为示意图
Fig.4 Schematic diagram fir free lane changing behavior of main vehicle
本研究在目前已有研究中提出的换道决策变量的基础上,进一步发掘新的换道决策变量,并且在后文的分析中发现新提出的特征变量对车辆的换道决策具有更重要的影响. 以往研究人员在研究车辆换道决策行为时,主要关注的影响变量有以下7个:
1)
2)
3)
4)
5)
6)
7)
这些特征变量仅考虑了主体车辆周围的部分交通状态信息,忽略了本车道交通状态对自由换道决策的影响. 李根[22]引入了主体车辆与目标车道前车的碰撞时间特征,提升了换道决策模型的预测精度,此外,本文还考虑了目标车道后车与主体车辆间的相对运动状态对自由换道决策的影响,引入主体车辆与目标车道后车的碰撞时间特征,并补全了车辆周围的交通状态相关特征,以下为新加入的特征:
1)
2)
3)
4)
5)
6)
7)
8)
9)
10)
为方便后续特征分析,对上述特征进行编号处理,如表1所示.
表 1 自由换道决策行为特征变量
Tab.1
| 特征编号 | 符号 | 特征含义 |
| 1 | | 主体车辆速度 |
| 2 | | 主体车辆加速度 |
| 3 | | 目标车道前车与主体车辆的距离 |
| 4 | | 目标车道前车与主体车辆速度差 |
| 5 | | 目标车道后车与主体车辆的距离 |
| 6 | | 目标车道后车与主体车辆速度差 |
| 7 | | 当前车道前车与主体车辆的距离 |
| 8 | | 当前车道前车与主体车辆速度差 |
| 9 | | 当前车道后车与主体车辆的距离 |
| 10 | | 当前车道后车与主体车辆速度差 |
| 11 | | 目标车道前车与主体车辆加速度差 |
| 12 | | 目标车道后车与主体车辆加速度差 |
| 13 | | 主体车辆与当前车道前车碰撞时间 |
| 14 | | 主体车辆与目标车道前车碰撞时间 |
| 15 | | 主体车辆与目标车道后车碰撞时间 |
| 16 | | 当前车道前车与主体车辆加速度差 |
| 17 | | 当前车道后车与主体车辆加速度差 |
3.2. 换道决策变量分析
从两方面评价提取到的特征对主体车辆自由换道决策行为的影响程度:一方面是特征变量与车辆最终是否执行换道决策行为之间的最大信息系数(maximal information coefficient,MIC),另一方面是由GBDT模型给出的特征变量在模型中的相对重要性对特征变量进行评价.
MIC是Reshef等[23]提出的一种变量间相互关系的分析方法,相比于常用的皮尔森相关系数,MIC具有更好的普适性,不仅可以找出变量间的线性函数关系,还可以找出变量间的非线性函数关系,具有低计算复杂度和高鲁棒性的特点. 互信息(mutual inforamtion):
联合概率密度分布函数p(x,y)通常较难计算,文献[23]在MIC中选择对互信息进行近似计算,对2个随机变量构成的散点图进行网格化,计算并找出使得互信息最大的网格化方案,MIC的计算公式如下:
式中:a、b分别表示x、y方向上划分网格的数量,B为变量,通常选择B的值为总数据量的0.6次方.
在python环境下完成MIC计算包安装后,分别计算3.1节中的特征变量与换道决策行为之间的最大信息系数,并按最大信息系数由高到低进行排序,结果如图5(a)所示.
图 5
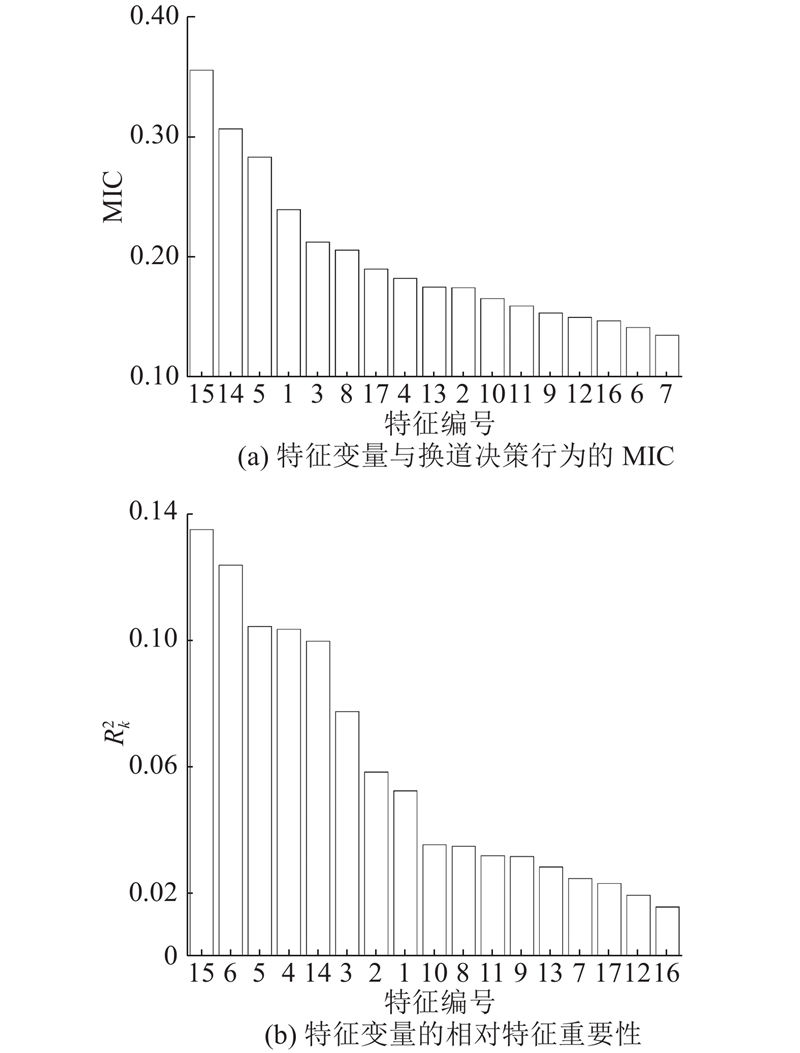
图 5 特征变量在不同评价指标下的重要程度
Fig.5 Importance of characteristic variables under different evaluation indicators
根据特征变量在GBDT模型生成过程中被选择作为分裂变量的次数以及这一次分裂带来的增益提升,给出特征变量在GBDT模型中的相对特征重要性[24]:
式中:
由于不同的特征变量评价指标各有特点,所给出的特征变量影响程度不尽相同,但是各评价指标均有各自的参考价值. 由图5可以看出,在2种不同评价指标给出的较重要的前10个特征中,有8个共同的特征变量,特征编号为15、14、8、5、4、3、2、1,其中包含了本研究补充的车辆周围交通状态特征,体现出新增特征变量的有效性. 在2种评价指标下,新提出的换道决策特征变量
4. 模型验证及结果分析
4.1. 模型参数优化
由于不同特征变量之间存在量纲不同的情况,不同的数据维度之间存在较大的数值差异,需要进行数据归一化处理. 具有大变化范围的特征可能会影响模型对小变化范围特征的关注度,进而影响模型的预测效果. 此外,特征变量归一化后能够使得最优解的寻优过程变得平缓,更容易正确的收敛到最优解. 本文采用的是min-max归一化方法,将特征变量的取值都转换到[0,1],则
式中:
本研究主要对4种换道决策模型进行模型训练及性能测试,包括支持向量机(SVM)、随机森林(RF)、GBDT及基于GBDT进行特征变换的融合决策模型,这些模型基本涵盖了常用的换道决策模型. 这些模型中都有超参数需要确定,而超参数的取值对换道决策模型的预测性能有较大的影响,并且参数的数量也会影响参数寻优的效率,因此一种高效准确的参数寻优方法十分必要. 在机器学习领域中的调参方法主要包括网格搜索(Grid Search)[25]、随机搜索(Random Search)[26]、贝叶斯优化(Bayesian Optimization)[27]和梯度优化(Gradient-based Optimization)[28]方法. 其中,贝叶斯优化方法在实验中相较于其他参数优化方法能够获得更加稳定和高效的参数优化结果,因此选择采用贝叶斯优化方法对模型进行参数寻优,在python环境下完成贝叶斯优化工具包Bayesian-Optimization后即可对模型进行参数优化. 设置贝叶斯优化工具包的参数为用10个参数点进行初始化,迭代30次,对全部的17个换道决策变量在训练集上进行模型参数优化. 对于整型的超参数由实数转换为整数后送入到模型中,SVM、RF和GBDT模型的参数寻优范围如表2所示,各模型的贝叶斯参数优化过程如图6所示,i为迭代次数,AUC为接受者操作特征曲线(receiver operating characteristic curve, ROC)的线下面积. 基于GBDT的融合决策模型中GBDT模型参数使用贝叶斯优化法进行参数寻优,LR模型参数使用网格搜索法进行参数寻优.
表 2 不同换道决策模型的参数寻优范围
Tab.2
| 换道决策模型 | 参数寻优范围 | 参数说明 |
| SVM | “C”:(0.001,60) | C:误差惩罚项参数 |
| “gamma”:(0.000 1,2) | Gamma:高斯核函数的参数 | |
| RF | “n_estimators”:(100,1 000) | n_estimators:树的数量 |
| “max_depth”:(3,10) | max_depth:树的最大深度 | |
| “max_features”:(0.1,0.999) | max_features:寻找最佳分裂点时属性数量占比 | |
| “min_samples_split”:(2,10) | min_samples_split:分裂节点所需最少样本数 | |
| GBDT | “learning_rate”:(0.001,0.2) | learning_rate:算法学习率 |
| “n_estimators”:(100,2 000) | n_estimators:树的数量 | |
| “subsample”:(0.1,1) | subsample:训练样本下采样比例 | |
| “max_depth”:(5,10) | max_depth:树的最大深度 | |
| “min_samples_leaf”:(1,12) | min_samples_leaf:分裂节点所需最少样本数 |
图 6
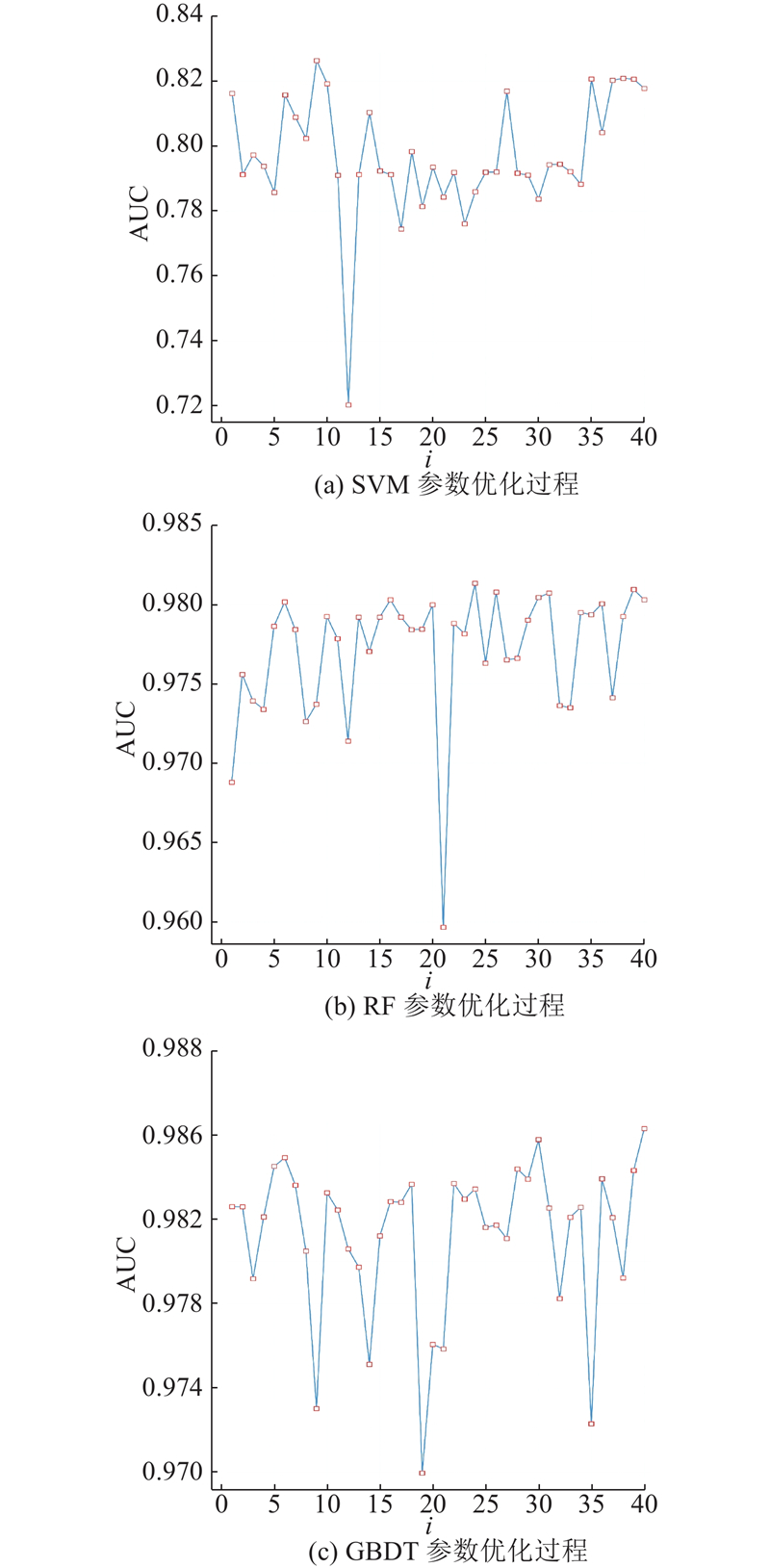
图 6 不同换道决策模型的参数优化过程
Fig.6 Parameter optimization process of different lane changing decision models
4.2. 不同换道决策模型性能对比分析
合适的评价指标有助于更好地进行模型性能分析,本文中主要选择的模型评价指标为分类准确率
式中:
确定好各个换道决策模型的超参数后,使用各模型参数寻优的结果在测试集上进行模型验证,结果如表3所示. 由表3可以看出,融合决策模型相比于其他单一的决策模型获得了更高的分类准确率,也有更高的真正类率
表 3 不同决策模型在测试集上的表现
Tab.3
| 决策模型 | | | |
| SVM | 81.82 | 72.79 | 85.30 |
| RF | 92.99 | 93.20 | 92.91 |
| GBDT | 93.56 | 91.84 | 94.23 |
| 融合决策模型 | 95.45 | 95.24 | 95.54 |
为了进一步挖掘新特征变量对自由换道决策行为的影响能力,使用融合决策模型进行不同特征变量组之间的对比实验,特征变量组中的数字即为特征编号,实验结果如表4所示.
表 4 不同特征变量组对比实验
Tab.4
| 特征变量组 | | | |
| [1,3,4,5,6,11,12] | 85.42 | 89.12 | 83.99 |
| [1,3,4,5,6,11,12,14] | 88.64 | 89.12 | 88.45 |
| [1,2,···,17] | 95.45 | 95.24 | 95.54 |
在表4中采用的变量组中,第一组变量是大多数研究人员主要考虑的换道决策变量,第二组变量是在第一组的基础上加入了主体车辆与目标车道前车的碰撞时间变量
图 7
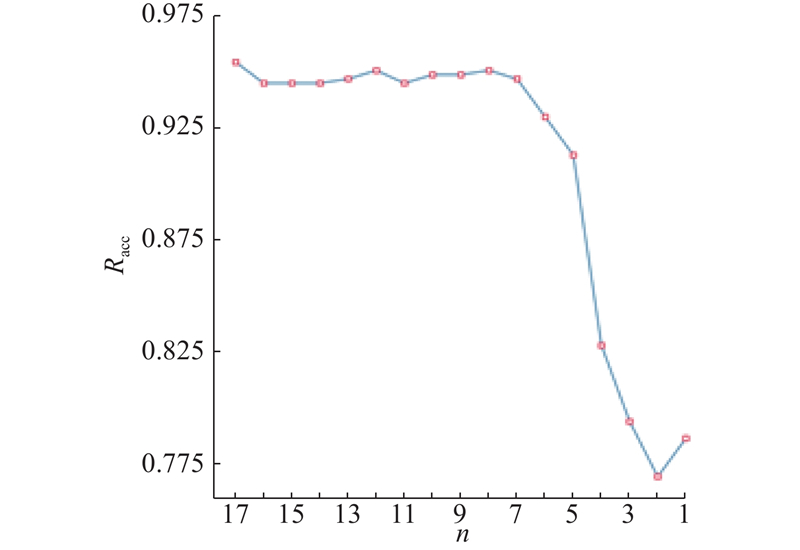
图 7 基于GBDT的融合决策模型特征选择过程
Fig.7 Feature selection process of fusion decision model based on GBDT
由图7可以看出,在删减特征的初期,由于删减的是相对特征重要性较低的特征,去除这些不太重要的特征对于模型的预测准确率没有太大的影响;当删减特征到只剩7个特征之后,再删减特征时会出现预测准确率的大幅下降. 采用[15,6,5,4,14,3,2]这7个特征建立融合决策模型时仍能够获得94.70%的预测准确率,虽然相比于由全部17个换道决策变量建立的融合决策模型,在预测准确率上略有下降,但是经过特征选择后的融合决策模型降低了模型复杂度,提高了模型的泛化能力,同时提升了模型的计算效率.
5. 结 论
(1)本文首次将基于GBDT进行特征变换的融合模型引入到车辆自由换道行为预测中,对比实验结果表明融合决策模型具有突出的表现,在测试集上以95.45%的预测准确率超越了其他的单一换道决策模型,说明所建立的融合换道决策模型能够准确预测主体车辆的自由换道行为.
(2)在引入了主体车辆周围交通状态特征变量后,融合决策模型的预测准确率得到了显著的提升,表明新提取的这些特征变量有助于融合决策模型进行换道决策分析,能够进一步提升融合决策模型的预测性能.
(3)在所有特征变量中,新提取的特征变量
在之后的研究中,将会考虑挖掘更多影响换道行为的换道决策变量,例如将车辆转向灯状态及驾驶员驾驶特点等因素加入到融合决策模型中,同时,模型的性能提升是未来需要进行的工作,以进一步提高换道决策模型的预测准确率.
参考文献
基于Stackelberg博弈理论的自主性车道变换模型
[J].DOI:10.3969/j.issn.1009-6744.2014.05.010 [本文引用: 1]
Discretionary lane changing modeling based on Stackelberg game theory
[J].DOI:10.3969/j.issn.1009-6744.2014.05.010 [本文引用: 1]
A model for the structure of lane-changing decisions
[J].DOI:10.1016/0191-2615(86)90012-3 [本文引用: 1]
A microscopic traffic simulator for evaluation of dynamic traffic management systems
[J].DOI:10.1016/S0968-090X(96)00006-X [本文引用: 1]
Integrated driving behavior modeling
[J].DOI:10.1016/j.trc.2007.02.002 [本文引用: 1]
Situation assessment for automatic lane-change maneuvers
[J].DOI:10.1109/TITS.2010.2049353 [本文引用: 1]
Modeling the various merging behaviors at expressway on-ramp bottlenecks using support vector machine models
[J].DOI:10.1016/j.trpro.2017.05.157 [本文引用: 1]
Modelling the human lane-change execution behaviour through Multilayer Perceptrons and Convolutional Neural Networks
[J].DOI:10.1016/j.trf.2018.04.004 [本文引用: 1]
Greedy function approximation: a gradient boosting machine
[J].
Modeling Mandatory Lane Changing Using Bayes Classifier and Decision Trees
[J].DOI:10.1109/TITS.2013.2285337 [本文引用: 2]
A critical evaluation of the Next Generation Simulation (NGSIM) vehicle trajectory dataset
[J].DOI:10.1016/j.trb.2017.09.018 [本文引用: 1]
Validity of trajectory-based calibration approach of car-following models in presence of measurement errors
[J].
Nonstationary kalman filter for estimation of accurate and consistent car-following data
[J].DOI:10.1177/0361198105193400101 [本文引用: 1]
Investigation of Discretionary Lane-Change Characteristics Using Next-Generation Simulation Data Sets
[J].DOI:10.1080/15472450.2013.810994 [本文引用: 1]
Classification and regression tree approach for predicting drivers’ merging behavior in short-term work zone merging areas
[J].DOI:10.1061/(ASCE)TE.1943-5436.0000412 [本文引用: 1]
Modeling and analysis of the lane-changing execution in longitudinal direction
[J].
A multiple resampling method for learning from imbalanced data sets
[J].DOI:10.1111/coin.2004.20.issue-1 [本文引用: 1]
基于梯度提升决策树的高速公路交织区汇入模型
[J].
Merging model in freeway weaving section based on gradient boosting decision tree
[J].
Detecting novel associations in large data sets
[J].DOI:10.1126/science.1205438 [本文引用: 2]
Multiple additive regression trees with application in epidemiology
[J].DOI:10.1002/(ISSN)1097-0258 [本文引用: 1]
Ten quick tips for machine learning in computational biology
[J].DOI:10.1186/s13040-017-0155-3 [本文引用: 1]
Random Search for Hyper-Parameter Optimization
[J].
Choosing multiple parameters for support vector machines
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}