|
|
|
| Vehicle’s four-wheel steering and direct yaw moment control considering driving styles |
Shu WANG( ),Haichuan ZHANG,Cangyan GUO,Xuan ZHAO*(),Huixin GUO ),Haichuan ZHANG,Cangyan GUO,Xuan ZHAO*(),Huixin GUO |
| School of Automobile, Chang’an University, Xi’an 710000, China |
|
|
|
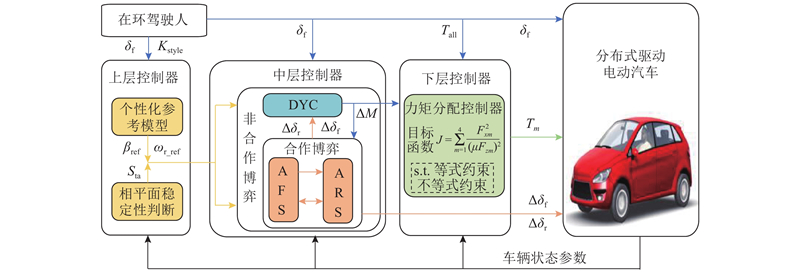
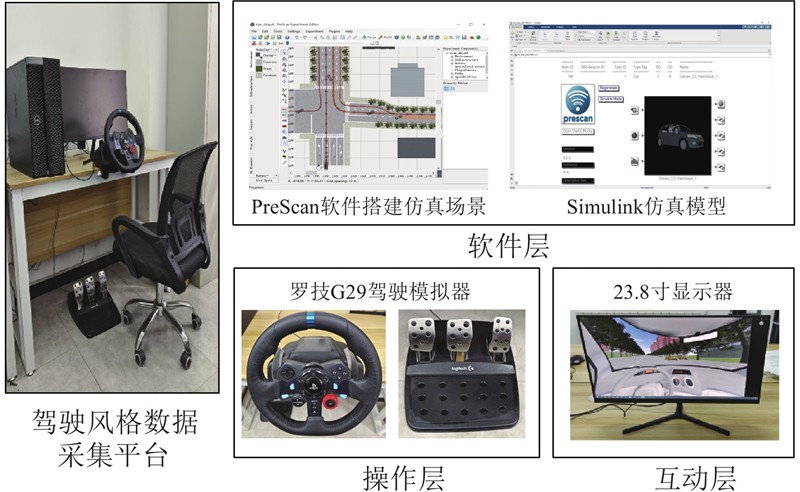
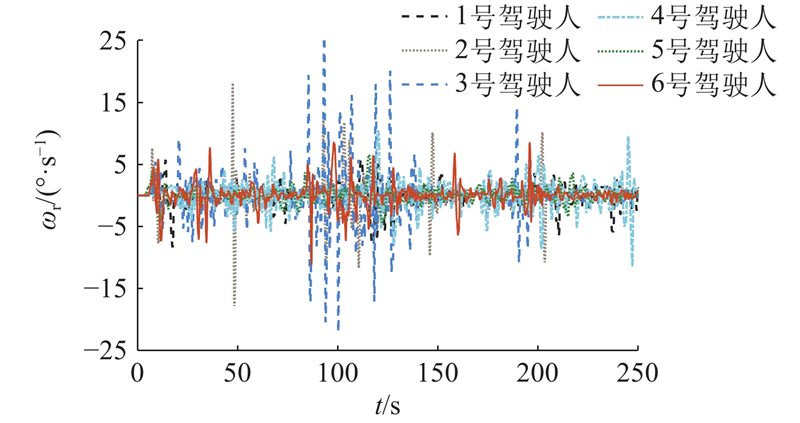
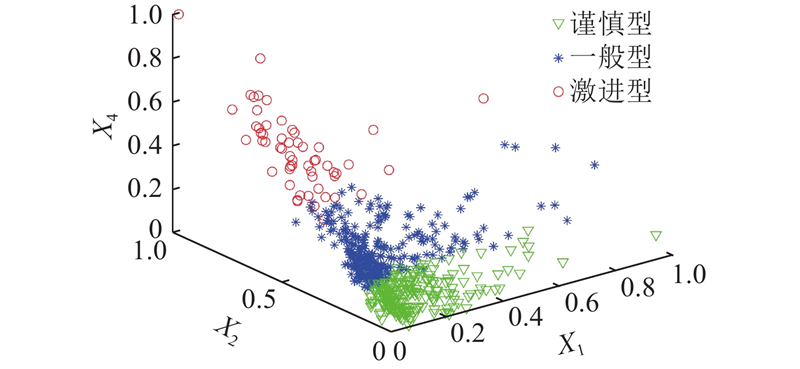
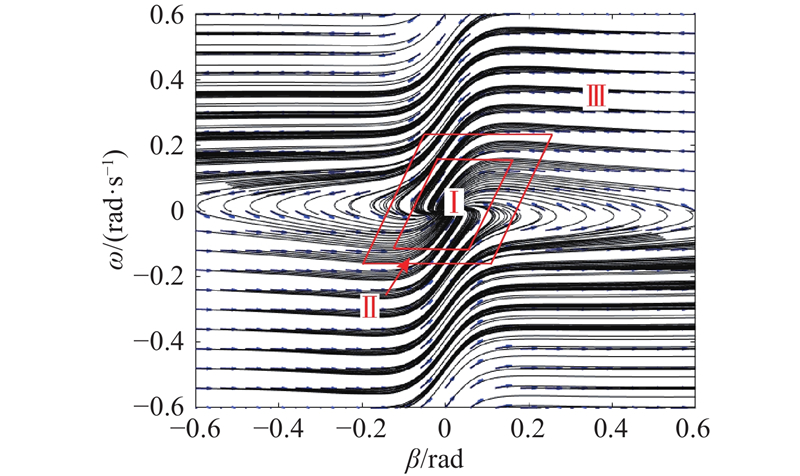
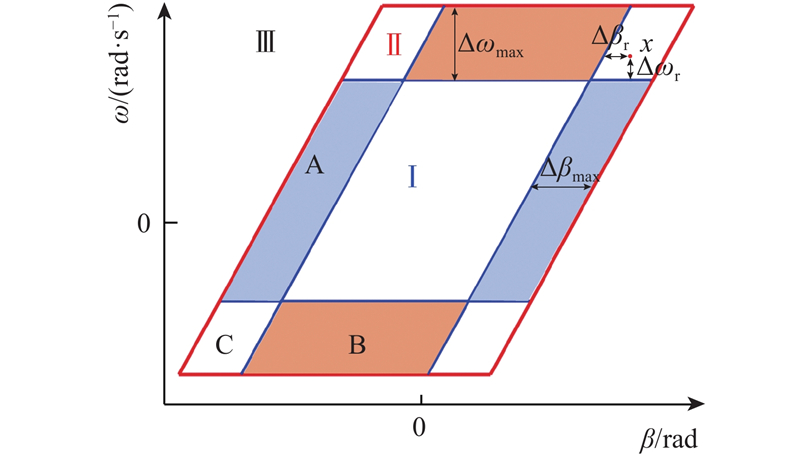
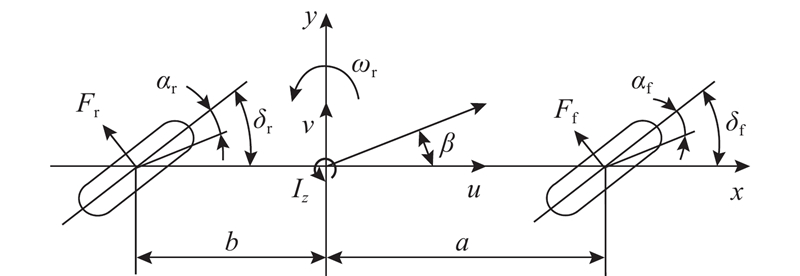
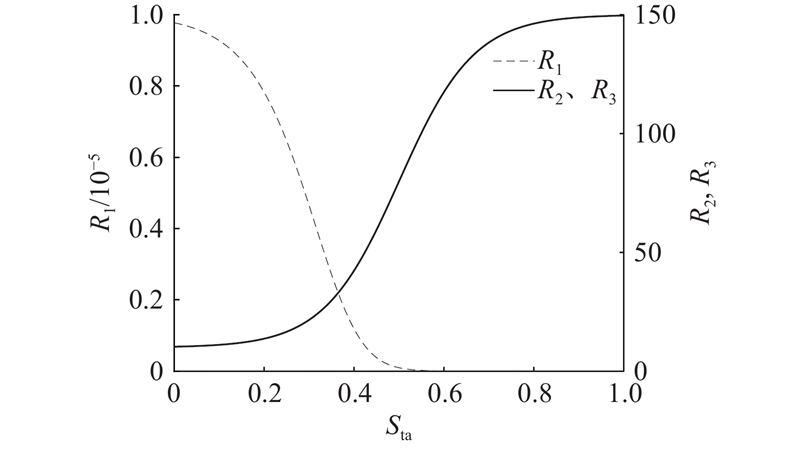
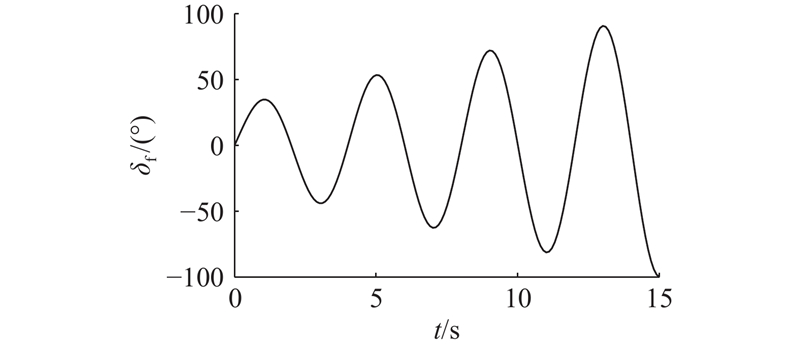
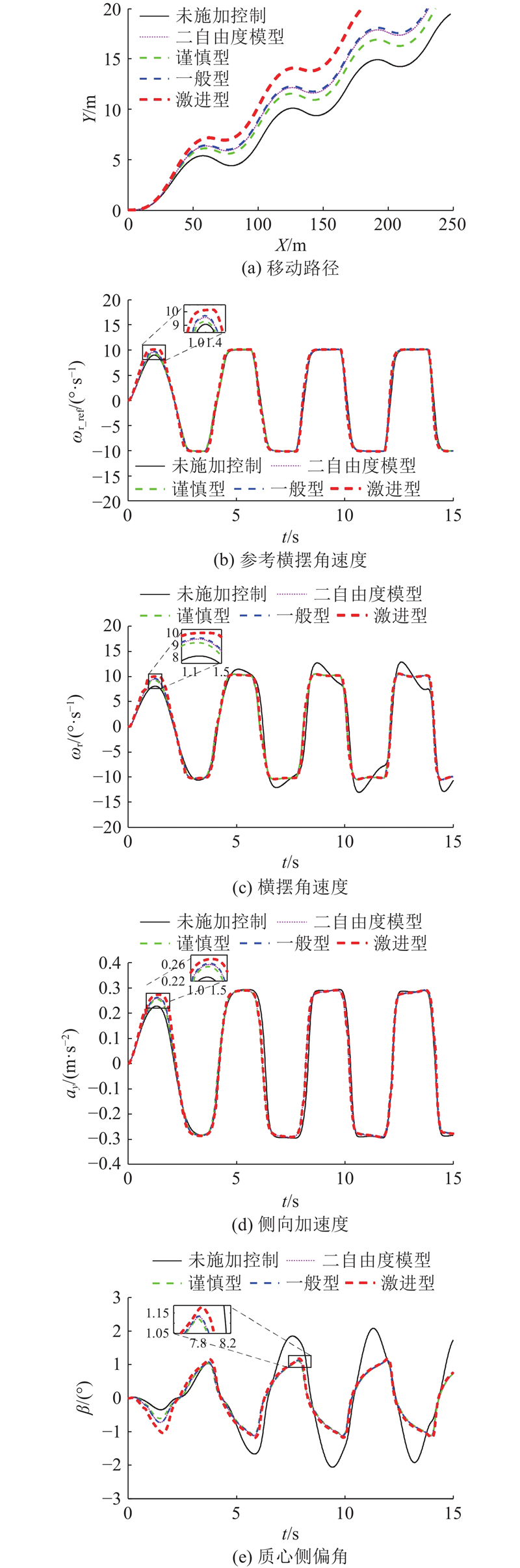
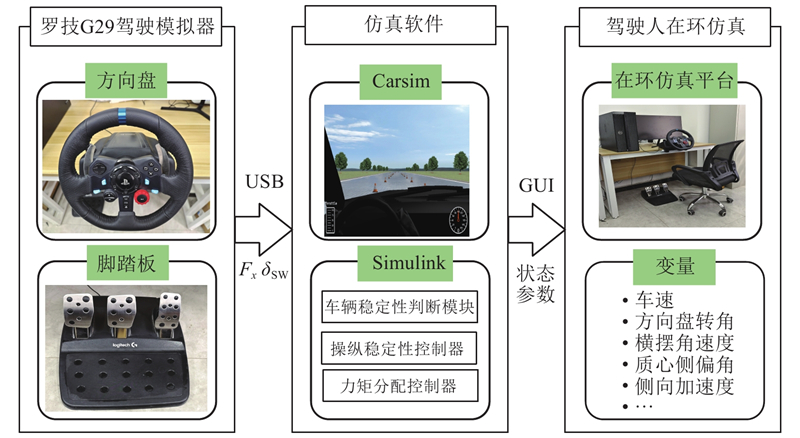
Abstract A hierarchical architecture coordinated control strategy considering driving styles for active four-wheel steering (AFWS) and direct yaw moment control (DYC) systems was proposed to improve the handling stability of distributed drive electric vehicles and accommodate the driving styles of different drivers. This strategy employed a three-layer control architecture, including the upper controller, the middle controller, and the lower controller. A reference model for handling stability considering driving styles was established in the upper controller. The stability factors of vehicles with different driving styles were determined through driver-in-the-loop experiments, and the vehicle states were categorized into stable, transitional, and unstable regions based on the phase plane theory. A hybrid game control model for AFWS and DYC based on Stackelberg leader-follower game and Pareto cooperative game was established in the middle controller to improve the vehicle’s handling stability under complex driving conditions. The lower controller was used to optimize the wheel drive torque distribution with the goal of minimizing the tire load rate. The driver-in-the-loop test platform was built based on the Simulink simulation software and the Logitech G29 driving simulator, and open-loop and in-loop tests with drivers were conducted. The results indicated that the proposed control strategy can adapt to the driving styles of different drivers and meet their personalized needs, thereby improving the vehicle’s handling stability.
|
|
Received: 12 October 2024
Published: 25 August 2025
|
|
|
| Fund: 国家自然科学基金资助项目(52472397,52372375);陕西省重点研发计划资助项目(2024GX-YBXM-260);陕西省科技成果转化计划资助项目(2024CG-CGZH-19). |
|
Corresponding Authors:
Xuan ZHAO
E-mail: shuwang@chd.edu.cn;zhaoxuan@chd.edu.cn
|
考虑驾驶风格的车辆四轮转向和直接横摆力矩控制
为了改善分布式驱动电动汽车的操纵稳定性,并考虑不同驾驶人的驾驶风格,针对主动四轮转向(AFWS)和直接横摆力矩控制(DYC)系统,提出基于分层架构的考虑驾驶风格的协调控制策略,包含上、中、下3层控制器. 在上层控制器建立考虑驾驶风格的操纵稳定性参考模型,通过驾驶人在环试验确定不同驾驶风格的车辆稳定性因数,并依据相平面理论将车辆工作区间划分为稳定域、过渡域与失稳域;在中层控制器建立基于Stackelberg主从博弈和Pareto合作博弈的AFWS和DYC混合博弈控制模型,提高车辆在复杂行驶工况下的操纵稳定性;在下层控制器以轮胎负荷率最小化为目标,优化车轮驱动转矩分配. 利用Simulink仿真软件和罗技G29驾驶模拟器搭建驾驶人在环试验平台,进行驾驶人开环和在环试验,结果表明,提出的控制策略能够适应不同驾驶人的驾驶风格,满足其个性化需求,从而提高了车辆的操纵稳定性.
关键词:
分布式驱动电动汽车,
驾驶风格,
主动四轮转向,
直接横摆力矩,
相平面
|
|
| [1] |
HANG P, XIA X, CHEN G, et al Active safety control of automated electric vehicles at driving limits: a tube-based MPC approach[J]. IEEE Transactions on Transportation Electrification, 2022, 8 (1): 1338- 1349
doi: 10.1109/TTE.2021.3100843
|
|
|
| [2] |
MOK Y M, ZHAI L, WANG C, et al A post impact stability control for four hub-motor independent-drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2022, 71 (2): 1384- 1396
doi: 10.1109/TVT.2021.3136186
|
|
|
| [3] |
赵轩, 王姝, 马建, 等 分布式驱动电动汽车底盘集成控制技术综述[J]. 中国公路学报, 2023, 36 (4): 221- 248
ZHAO Xuan, WANG Shu, MA Jian, et al Review of chassis integrated control technology for distributed drive electric vehicles[J]. China Journal of Highway and Transport, 2023, 36 (4): 221- 248
doi: 10.3969/j.issn.1001-7372.2023.04.018
|
|
|
| [4] |
WU Y, LI B, ZHANG N, et al Rear-steering based decentralized control of four-wheel steering vehicle[J]. IEEE Transactions on Vehicular Technology, 2020, 69 (10): 10899- 10913
doi: 10.1109/TVT.2020.3020154
|
|
|
| [5] |
LIU H, LIU C, HAN L, et al Handling and stability integrated control of AFS and DYC for distributed drive electric vehicles based on risk assessment and prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (12): 23148- 23163
doi: 10.1109/TITS.2022.3193891
|
|
|
| [6] |
SHI M, HE H, LI J, et al Path planning and following control of autonomous bus under time-varying parameters against parametric uncertainties and external disturbances[J]. IEEE Transactions on Vehicular Technology, 2022, 71 (7): 7057- 7070
doi: 10.1109/TVT.2022.3170440
|
|
|
| [7] |
CHEN J, SHUAI Z, ZHANG H, et al Path following control of autonomous four-wheel-independent-drive electric vehicles via second-order sliding mode and nonlinear disturbance observer techniques[J]. IEEE Transactions on Industrial Electronics, 2021, 68 (3): 2460- 2469
doi: 10.1109/TIE.2020.2973879
|
|
|
| [8] |
WU X, ZHOU B, WU T, et al Research on intervention criterion and stability coordinated control of AFS and DYC[J]. International Journal of Vehicle Design, 2022, 90 (1/2/3/4): 116- 141
|
|
|
| [9] |
SUN C, XU Z, DENG S, et al Integration sliding mode control for vehicle yaw and rollover stability based on nonlinear observation[J]. Transactions of the Institute of Measurement and Control, 2022, 44 (15): 3039- 3056
doi: 10.1177/01423312221099414
|
|
|
| [10] |
陈特, 陈龙, 徐兴, 等 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019, 41 (10): 1109- 1116
CHEN Te, CHEN Long, XU Xing, et al Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019, 41 (10): 1109- 1116
|
|
|
| [11] |
林程, 梁晟, 宫新乐, 等 面向极限工况的分布式驱动电动汽车动力学集成控制方法[J]. 汽车工程, 2022, 44 (9): 1372- 1385
LIN Cheng, LIANG Sheng, GONG Xinle, et al Integrated dynamic control strategy for extreme maneuvers of 4WIDEVs[J]. Automotive Engineering, 2022, 44 (9): 1372- 1385
|
|
|
| [12] |
YIN H, ZHAO C, LI M, et al A game theory approach to energy management of an engine–generator/battery/ultracapacitor hybrid energy system[J]. IEEE Transactions on Industrial Electronics, 2016, 63 (7): 4266- 4277
doi: 10.1109/TIE.2016.2539245
|
|
|
| [13] |
NA X, COLE D J Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller[J]. IEEE Transactions on Human-Machine Systems, 2015, 45 (1): 25- 38
doi: 10.1109/THMS.2014.2363124
|
|
|
| [14] |
LIANG J, LU Y, YIN G, et al A distributed integrated control architecture of AFS and DYC based on MAS for distributed drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2021, 70 (6): 5565- 5577
|
|
|
| [15] |
LIANG J, LU Y, PI D, et al A decentralized cooperative control framework for active steering and active suspension: multi-agent approach[J]. IEEE Transactions on Transportation Electrification, 2022, 8 (1): 1414- 1429
|
|
|
| [16] |
JI X, LIU Y, HE X, et al Interactive control paradigm-based robust lateral stability controller design for autonomous automobile path tracking with uncertain disturbance: a dynamic game approach[J]. IEEE Transactions on Vehicular Technology, 2018, 67 (8): 6906- 6920
|
|
|
| [17] |
NA X, COLE D J Linear quadratic game and non-cooperative predictive methods for potential application to modelling driver-AFS interactive steering control[J]. Vehicle System Dynamics, 2013, 51 (2): 165- 198
|
|
|
| [18] |
ZHU B, YAN S, ZHAO J, et al Personalized controller design for electric power steering system based on driver behavior[J]. SAE International Journal of Passenger Cars -Electronic and Electrical Systems, 2018, 11 (2): 77- 88
|
|
|
| [19] |
宗长富, 林娜, 李刚, 等 “车适应人”线控汽车理想特性参考模型神经网络建模[J]. 吉林大学学报: 工学版, 2013, 43 (S1): 514- 520
ZONG Changfu, LIN Na, LI Gang, et al Neural network modeling of ideal characteristics reference model for “car adaption for driver” x-by-wire vehicle[J]. Journal of Jilin University: Engineering and Technology Edition, 2013, 43 (S1): 514- 520
|
|
|
| [20] |
王姝, 赵轩, 余强, 等 基于驾驶人转向意图的双电机驱动电动汽车稳定性控制策略[J]. 中国公路学报, 2022, 35 (1): 334- 349
WANG Shu, ZHAO Xuan, YU Qiang, et al Vehicle stability control strategy for a dual-motor drive electric vehicle considering driver steering intention[J]. China Journal of Highway and Transport, 2022, 35 (1): 334- 349
doi: 10.3969/j.issn.1001-7372.2022.01.028
|
|
|
| [21] |
WANG Q, ZHAO Y, DENG Y, et al Optimal coordinated control of ARS and DYC for four-wheel steer and in-wheel motor driven electric vehicle with unknown tire model[J]. IEEE Transactions on Vehicular Technology, 2020, 69: 10809- 10819
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|