|
|
|
| Comprehensive error modeling and compensation of a large gantry automatic fiber placement machine |
Jian-bo WU( ),Jun LI,Cheng-gan ZHENG,Liang CHENG*() ),Jun LI,Cheng-gan ZHENG,Liang CHENG*() |
| Key Laboratory of Advanced Manufacturing Technology of Zhejiang Province, Zhejiang University, Hangzhou 310027, China |
|
|
|
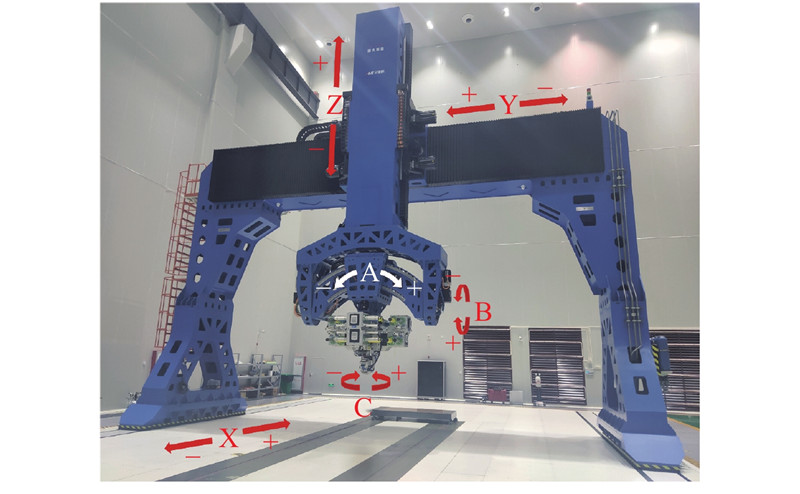
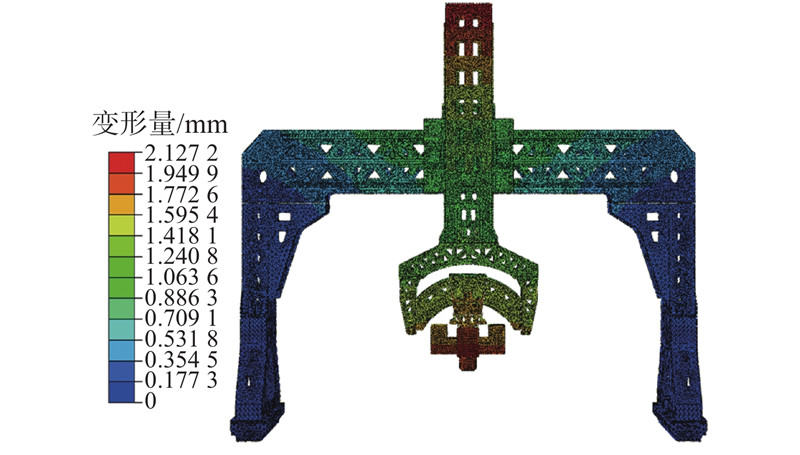
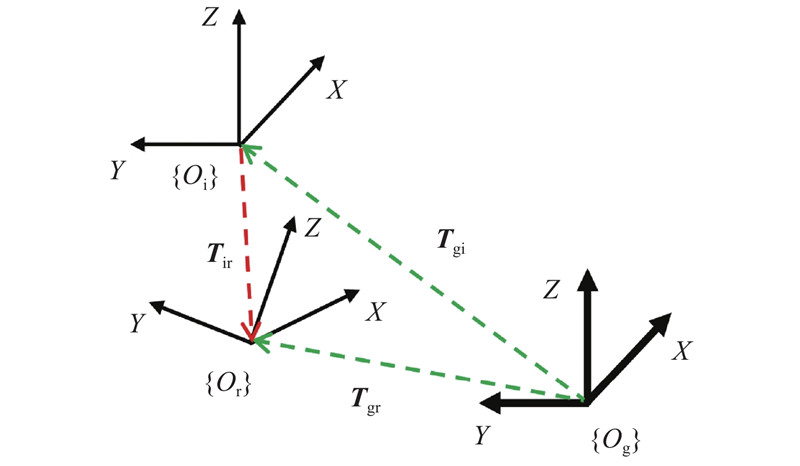
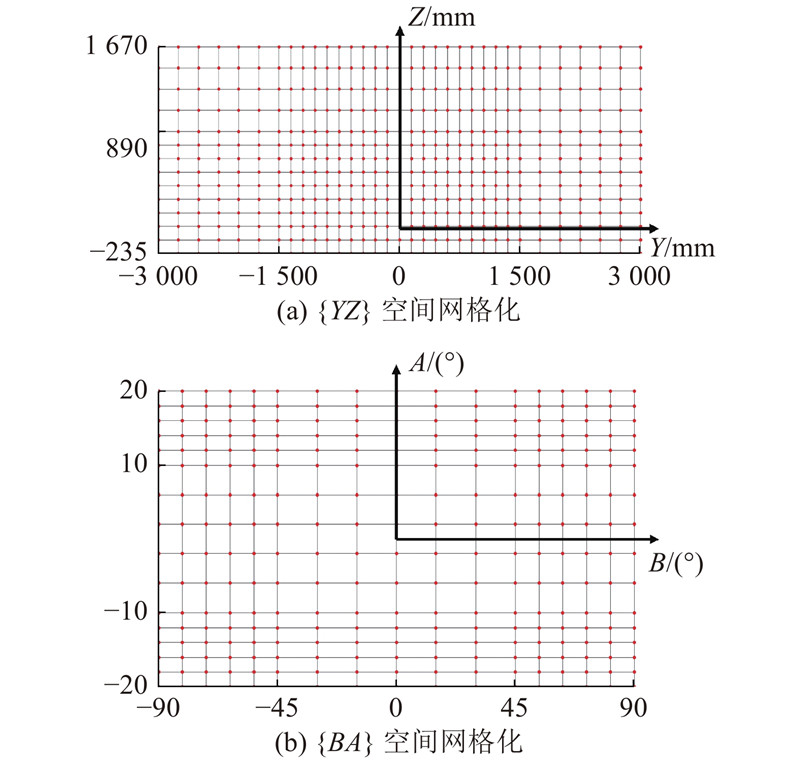
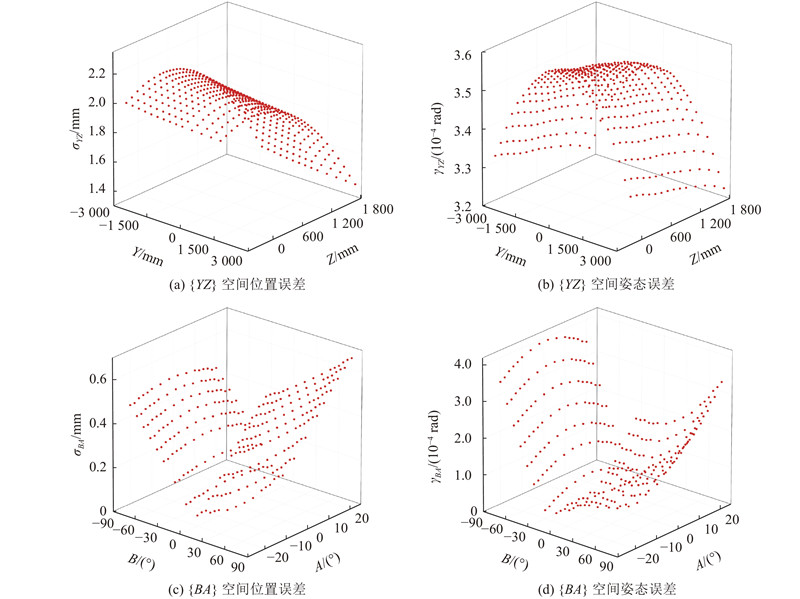
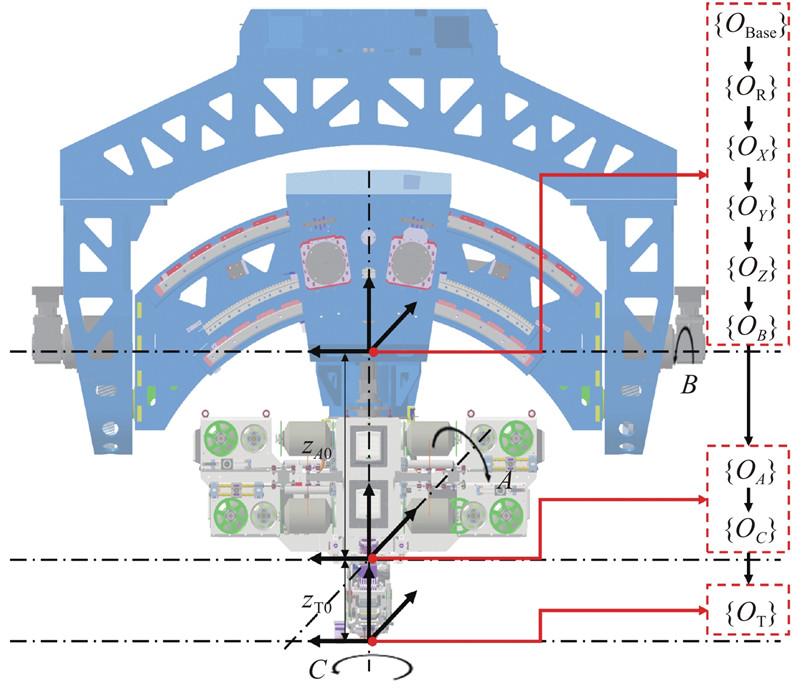
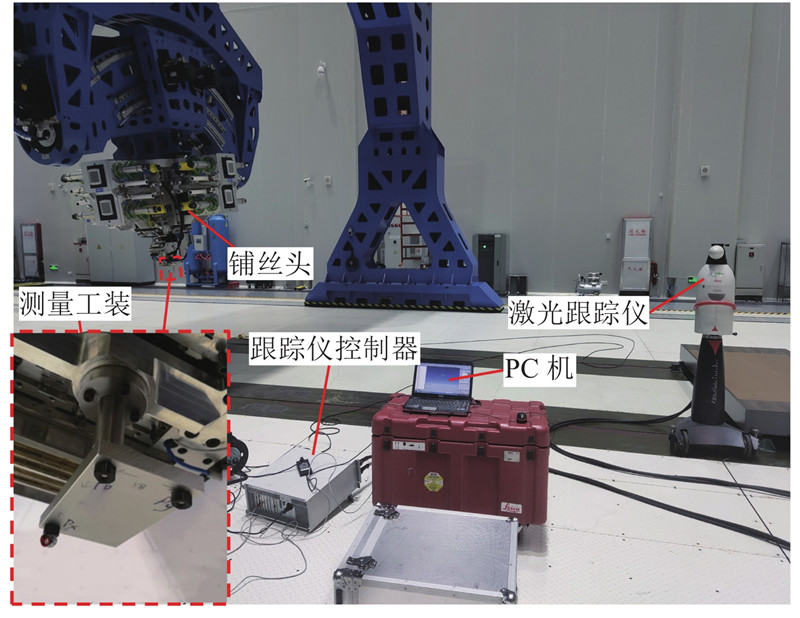
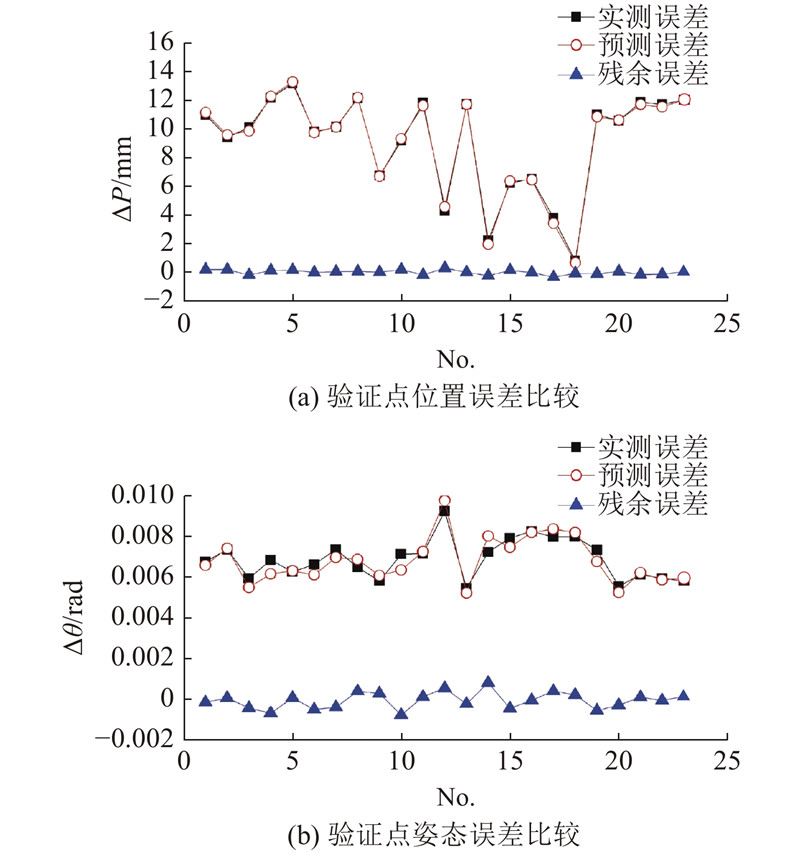
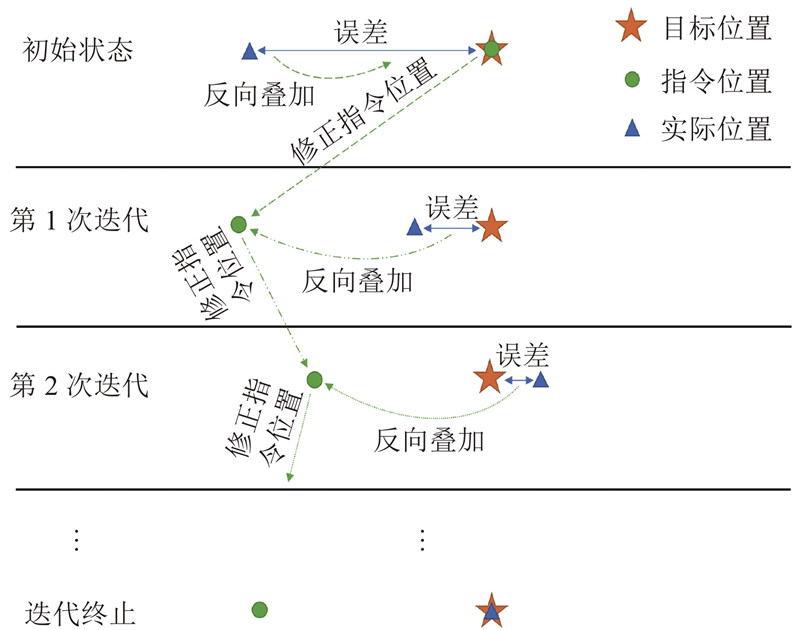
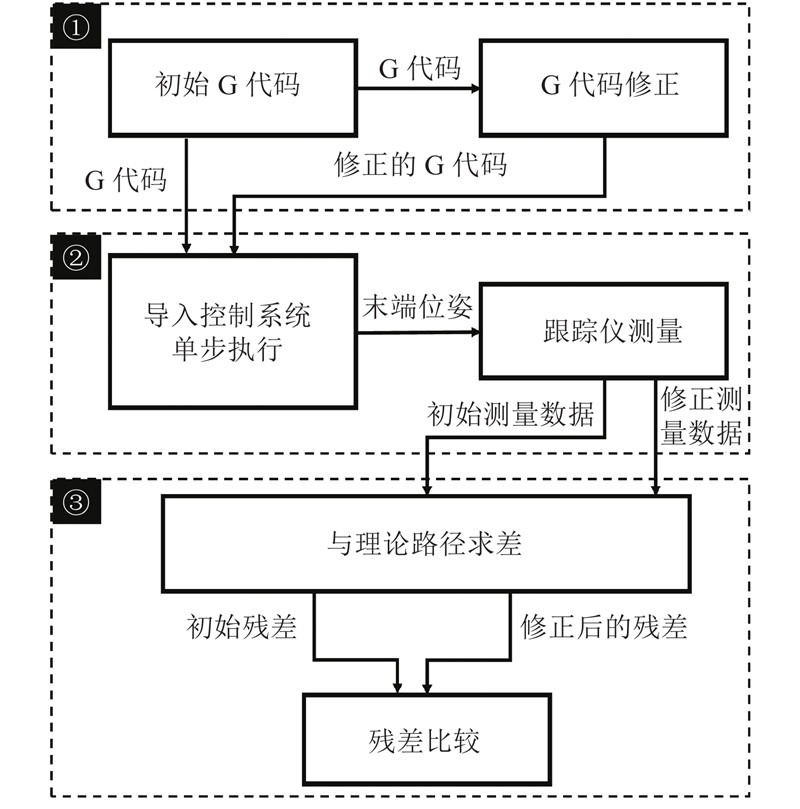
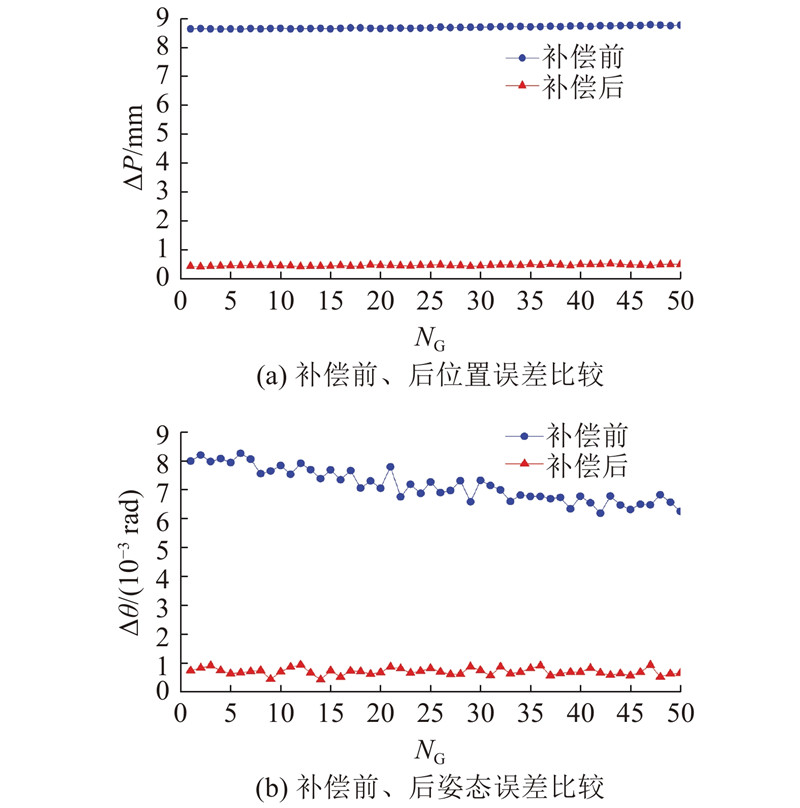
Abstract A comprehensive error modeling and compensation method of gravity deformation and geometric error was proposed, in order to improve the accuracy of a large gantry automatic fiber placement (AFP) machine. Finite element method (FEM) was used for static analysis of the gantry AFP machine, and the gravity deformation model was established by workspace meshing method. A geometric error model based on homogeneous transformation matrix (HTM) and Chebyshev polynomial was established, in which the geometric error parameters were identified by combining the measurement data of gravity deformation removal and Powell algorithm. The gravity deformation model and the geometric error model were combined, and a G-code correction strategy based on comprehensive error compensation was proposed. A comprehensive error compensation experiment was performed on the gantry AFP machine, and results showed that before compensation, the error of the gantry AFP machine was large, which cannot fully meet the requirement of placement accuracy. After compensation, the position error and posture error were greatly reduced, the posture error was reduced by over 80%, and the position error was reduced by more than 90%, which met the requirement of placement accuracy, and proved the effectiveness of the proposed comprehensive error modeling and compensation method.
|
|
Received: 26 August 2021
Published: 03 March 2022
|
|
|
|
Corresponding Authors:
Liang CHENG
E-mail: wujianbo1011@zju.edu.cn;chengliang@zju.edu.cn
|
大型龙门铺丝机综合误差建模及补偿
为了提高大型龙门自动铺丝(AFP)机的精度,提出重力变形与几何误差综合建模与补偿方法. 采用有限元法对龙门铺丝机进行静力学分析,通过工作空间网格化方法建立重力变形模型;基于齐次变换矩阵与切比雪夫多项式建立几何误差模型,结合剔除重力变形的测量数据与Powell算法实现对几何误差参数的辨识;综合重力变形模型和几何误差模型,提出基于综合误差补偿的G代码修正策略. 在龙门铺丝机上开展综合误差补偿对比实验,结果表明,补偿前龙门铺丝机误差较大,不能完全满足铺放精度需求,而经过补偿后位置误差和姿态误差均大幅度降低,其中姿态误差减小80%以上,而位置误差减小90%以上,满足铺放精度需求,证明了所提出的综合误差建模和补偿方法的有效性.
关键词:
龙门自动铺丝(AFP)机,
重力变形,
工作空间网格化,
几何误差,
误差辨识,
综合误差补偿
|
|
| [1] |
杜善义 先进复合材料与航空航天[J]. 复合材料学报, 2007, 24 (1): 1- 12
DU Shan-yi Advanced composite materials and aerospace engineering[J]. Acta Materiae Compositae Sinica, 2007, 24 (1): 1- 12
doi: 10.3321/j.issn:1000-3851.2007.01.001
|
|
|
| [2] |
王显峰, 严飙, 薛柯, 等 机器人高效自动铺丝技术研究进展[J]. 航空制造技术, 2019, 62 (16): 14- 20
WANG Xian-feng, YAN Biao, XUE Ke, et al Research progress of robot automatic placement technology with high efficiency[J]. Aeronautical Manufacturing Technology, 2019, 62 (16): 14- 20
|
|
|
| [3] |
黄文宗, 孙容磊, 张鹏, 等 国内复合材料自动铺放技术发展[J]. 航空制造技术, 2014, 460 (16): 84- 89
HUANG Wen-zong, SUN Rong-lei, ZHANG Peng, et al Development of automated placement technology for composite material[J]. Aeronautical Manufacturing Technology, 2014, 460 (16): 84- 89
doi: 10.3969/j.issn.1671-833X.2014.16.020
|
|
|
| [4] |
文立伟, 肖军, 王显峰, 等 中国复合材料自动铺放技术研究进展[J]. 南京航空航天大学学报, 2015, 47 (5): 637- 649
WEN Li-wei, XIAO Jun, WANG Xian-feng, et al Progress of automated placement technology for composites in China[J]. Journal of Nanjing University of Aeronautics Astronautics, 2015, 47 (5): 637- 649
|
|
|
| [5] |
杨建国 数控机床误差补偿技术现状与展望[J]. 航空制造技术, 2012, 401: 32- 37
YANG Jian-guo Present situation and prospect of error compensation technology for NC machine tool[J]. Aeronautical Manufacturing Technology, 2012, 401: 32- 37
doi: 10.3969/j.issn.1671-833X.2012.03.002
|
|
|
| [6] |
杨建国, 范开国, 杜正春. 数控机床误差实时补偿技术 [M]. 北京: 机械工业出版社, 2013.
|
|
|
| [7] |
刘焕牢, 李曦, 李斌, 等 数控机床几何误差和误差补偿关键技术[J]. 机械工程师, 2003, (1): 16- 18
LIU Huan-lao, LI Xi, LI Bin, et al Measurement methods and key technology of CNC machine tool error compensation[J]. Mechanical Engineer, 2003, (1): 16- 18
doi: 10.3969/j.issn.1002-2333.2003.01.006
|
|
|
| [8] |
HE Z Y, FU J Z, ZHANG L C, et al A new error measurement method to identify all six error parameters of a rotational axis of a machine tool[J]. International Journal of Machine Tools and Manufacture, 2015, 88: 1- 8
doi: 10.1016/j.ijmachtools.2014.07.009
|
|
|
| [9] |
李海涛, 郭俊杰, 邓玉芬, 等 数控机床几何精度的位姿测量原理[J]. 西安交通大学学报, 2016, 50 (11): 62- 68
LI Hai-tao, GUO Jun-jie, DENG Yu-fen, et al Pose measuring principle of geometric accuracy of numerical control machine tools[J]. Journal of Xi’an Jiaotong University, 2016, 50 (11): 62- 68
doi: 10.7652/xjtuxb201611010
|
|
|
| [10] |
付国强, 傅建中, 沈洪垚 五轴数控机床旋转轴几何误差辨识新方法[J]. 浙江大学学报:工学版, 2015, 49 (5): 848- 857
FU Guo-qiang, FU Jian-zhong, SHEN Hong-yao One novel geometric error identification of rotary axes for five-axis machine tool[J]. Journal of Zhejiang University: Engineering Science, 2015, 49 (5): 848- 857
|
|
|
| [11] |
LEE K I, LEE D M, YANG S H Parametric modeling and estimation of geometric errors for a rotary axis using double ball-bar[J]. The International Journal of Advanced Manufacturing Technology, 2012, 62: 741- 750
doi: 10.1007/s00170-011-3834-0
|
|
|
| [12] |
凡志磊, 杨建国, 李中华 一种数控机床几何误差多项式模型的阶数选择方法[J]. 机床与液压, 2009, 37 (10): 49- 50
FAN Zhi-lei, YANG Jian-guo, LI Zhong-hua The polynomial order selection for the geometric errors modeling of NC machine tool[J]. Machine Tool and Hydraulics, 2009, 37 (10): 49- 50
doi: 10.3969/j.issn.1001-3881.2009.10.016
|
|
|
| [13] |
XIANG S T, DENG M, LI H M, et al Cross-rail deformation modeling, measurement and compensation for a gantry slideway grinding machine considering thermal effects[J]. Measurement Science and Technology, 2019, 30 (6): 065007
doi: 10.1088/1361-6501/ab1232
|
|
|
| [14] |
WU J B, CHENG L, BI Y B, et al Kinematic modeling and parameter identification for a heavy gantry-type automated fiber placement machine considering gravity deformation[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2021, 235 (8): 1418- 1431
doi: 10.1177/0954406220945728
|
|
|
| [15] |
WANG Z H, CHEN W L, WANG M, et al Kinematic calibration of bracket type parallel posture alignment mechanism considering the gravity effect[J]. Industrial Robot, 2019, 46 (5): 581- 598
doi: 10.1108/IR-09-2018-0183
|
|
|
| [16] |
HE G Y, SHI P P, GUO L Z, et al A linear model for the machine tool assembly error prediction considering roller guide error and gravity-induced deformation[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2020, 234 (15): 2939- 2950
doi: 10.1177/0954406220911401
|
|
|
| [17] |
刘又午, 章青, 赵小松, 等 数控机床全误差模型和误差补偿技术的研究[J]. 制造技术与机床, 2003, 74 (7): 46- 50
LIU You-wu, ZHANG Qin, ZHAO Xiao-song, et al Research on total error model and error compensation of CNC machine tool[J]. Manufacturing Technology Machine Tool, 2003, 74 (7): 46- 50
doi: 10.3969/j.issn.1005-2402.2003.07.016
|
|
|
| [18] |
CUI G W, LU Y, LI J G, et al Geometric error compensation software system for CNC machine tools based on NC program reconstructing[J]. International Journal of Advanced Manufacturing Technology, 2012, 63 (1): 169- 180
|
|
|
| [19] |
杨建国. 数控机床误差综合补偿技术及应用[D]. 上海: 上海交通大学, 1998.
YANG Jian-guo. Error synthetic compensation technique and application for NC machine tools[D]. Shanghai: Shanghai Jiao Tong University, 1998.
|
|
|
| [20] |
王维, 杨建国, 姚晓栋, 等 数控机床几何误差与热误差综合建模及其实时补偿[J]. 机械工程学报, 2012, 48 (7): 165- 170
WANG Wei, YANG Jian-guo, YAO Xiao-dong, et al Synthesis modeling and real-time compensation of geometric error and thermal error for CNC machine tools[J]. Journal of Mechanical Engineering, 2012, 48 (7): 165- 170
doi: 10.3901/JME.2012.07.165
|
|
|
| [21] |
HSU Y Y, WANG S S A new compensation method for geometry errors of five-axis machine tools[J]. International Journal of Machine Tools and Manufacture, 2007, 47 (2): 352- 360
doi: 10.1016/j.ijmachtools.2006.03.008
|
|
|
| [22] |
ZHAO D, BI Y B, KE Y L An efficient error compensation method for coordinated CNC five-axis machine tools[J]. International Journal of Machine Tools and Manufacture, 2017, 123: 105- 115
doi: 10.1016/j.ijmachtools.2017.08.007
|
|
|
| [23] |
AGUADO S, SAMPER D, SANTOLARIA J, et al Identification strategy of error parameter in volumetric error compensation of machine tool based on laser tracker measurements[J]. International Journal of Machine Tools and Manufacture, 2012, 53 (1): 160- 169
doi: 10.1016/j.ijmachtools.2011.11.004
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|