

干道信号协同控制是城市信号控制中非常重要的一环,而相位差优化是实现协同控制的关键技术. 根据控制思路的不同,可以将信号控制方法分为最大绿波带法和最小延误法2类[1]. 最大绿波带法被广泛认为是最经济有效的干线协调方法之一,具有概念简洁、调控效果明显等优点. 优化思路是通过调整相位差,使得车辆连续通过带的带宽最大,从而保证尽可能多的车流不停顿地通过多个连续交叉口. 此方法由Little等[2]提出,并开发为MAXBAND软件[3]. Gartner等[4]在MAXBAND的基础上进行改进,提出复合式绿波带宽控制方法. 这些方法都使用混合整数线性规划方法. 对于双向干线绿波带宽相等的情况,文献[5]介绍了图解法和数解法2种经典算法. 其中,图解法主要用于手工作业,现已较少使用;数解法由于计算简便、易于编程,适用于双向对称式干道,在不饱和的交通状态下具有很好的调控效果,已经在国内得到了广泛应用[6-8].
目前已有许多学者对数解法进行了修正或改进,以弥补其本身的不足,并拓宽其适用范围. 栗红强[9]对存在双周期交叉口或双向流量差异较大时的绿波带宽设计与计算问题进行了研究. 卢凯等[10]深入分析了绿波带宽计算、最佳理想信号间距的选取原则等方面存在的问题,提出改进方法,随后将改进方法的应用场景拓展到交叉口混合放行或双向通行条件不对称的干道[11]. 王殿海等[12]分析了实际信号与理想信号的相对位置对绿波带宽度的影响,提出可以确定所有相位差组合的可能解的改进数解法. 荆彬彬等[13]研究了双向带速不等的情况,提出同时优化双向带速和信号周期的非线性规划模型. 叶晓飞等[14]提出简化的遍历方法,可以确保得到使带宽最大的协调方案. 李小会等[15]针对进口单独放行条件设计了双向绿波数解法.
数解法仍有改进空间. 现有的研究成果中,一部分对数解法的计算步骤进行改进,如改进判定指标、优化计算步长等,但不能确保解的最优性;一部分结合数解法的思路,采用遍历穷举的方法求解,但需要较大的计算量. 针对以上不足,本文深入分析绿波带宽度与交叉口间隔、绿信比之间的数学关系,提出改进数解法.
1. 经典数解法
1.1. 基本定义
1) 以x1为起点,向前(以上行方向为前)以a为间隔取点,作为初始理想信号位置;
2) 将初始理想信号整体前后移动,记移动距离为l,满足
图1中,di为Si到最近理想信号的偏移距离;Di为Si到其后方最近初始理想信号位置的距离:
式中:mod(p,q)表示p除以q的余数,p和q是整数.
图 1

实际信号与理想信号的偏移可能会带来绿波带宽度的损失[12]. 数解法希望使实际信号与理想信号匹配程度最高. 以往的文献对 “最高匹配程度”有不同的定义,下面将介绍并比较这些定义.
1.2. 计算步骤
通过算例1说明数解法的具体步骤.
算例1 干道上行方向有5个信号交叉口,交叉口编号及相邻交叉口间距如图2所示. 各交叉口协调相位的绿信比分别为45%、50%、60%、40%、55%. 公共周期C的取值为[80,100] s,设计车速v取值为[9,11] m/s.
图 2

1) 确定a的可行值. 以
表 1 Di邻项差计算表
Tab.1
| 信号 | Di/m | 邻项差/m |
| S1 | 0 | − |
| S4 | 40 | 40 |
| S3 | 60 | 20 |
| S2 | 300 | 240 |
| S5 | 320 | 20 |
| S1 | 380 | 60 |
图 3
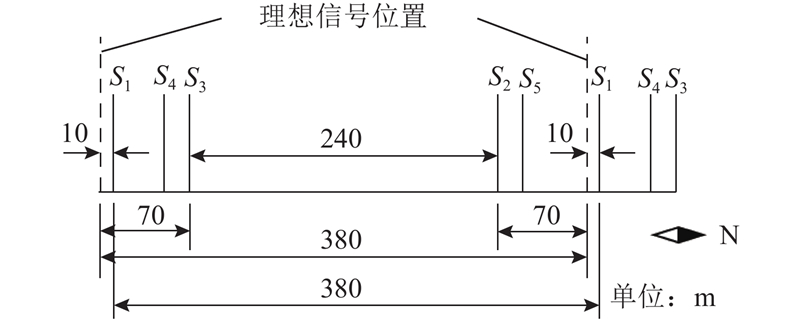
图 3 经典数解法得到的算例1理想信号布置位置
Fig.3 Ideal signal placement of example 1 using original numerical method
表 2 算例1各理想信号间距与匹配程度指标对应关系
Tab.2
| a/m | b/m | (b∶a)/% | dmax/m |
| 注:“▲”为最优解标记符号. | |||
| 360 | 200 | 56 | 80 |
| 370 | 220 | 59 | 75 |
| 380 | 240 | 63 | 70▲ |
| 390 | 240 | 62 | 75 |
| 400 | 220 | 55 | 90 |
| 410 | 170 | 41 | 120 |
| 420 | 140 | 33 | 140 |
| 430 | 180 | 42 | 125 |
| 440 | 220 | 50 | 110 |
| 450 | 210 | 47 | 120 |
| 460 | 180 | 39 | 140 |
| 470 | 150 | 32 | 160 |
| 480 | 180 | 38 | 150 |
| 490 | 230 | 47 | 130 |
| 500 | 280 | 56 | 110 |
| 510 | 330 | 65 | 90 |
| 520 | 360▲ | 69▲ | 80 |
| 530 | 350 | 66 | 90 |
| 540 | 340 | 63 | 100 |
| 550 | 330 | 60 | 110 |
3) 确定最佳周期与带速. 以aopt=380 m为例,若测得实际干道平均车速为9.5 m/s,可设置最佳周期Copt=2×380÷9.5=80 s.
4) 确定相位差和绿波带宽度. 将实际信号与最近理想信号同步,得到以绿灯中心时刻计算的相位差和绿波带宽度,结果见表3. 表中,λ为协调相绿信比,绿时损失λloss=di/a;有效绿信比λe=λ−λloss.
表 3 算例1中a=380 m时的相位差计算
Tab.3
| 信号 编号 | 最近理想 信号编号 | 相位 差/% | 实际信号所处方位 | λ /% | λloss /% | λe /% | B /% |
| S1 | ① | 0 | 前 | 45 | 2.63 | 42.37 | 26.85/2+ 31.58/2= 29.21 |
| S2 | ③ | 0 | 后 | 50 | 18.42 | 31.58 | |
| S3 | ④ | 50 | 前 | 60 | 18.42 | 41.58 | |
| S4 | ⑤ | 0 | 前 | 40 | 13.15 | 26.85 | |
| S5 | ⑦ | 0 | 后 | 55 | 13.15 | 41.85 |
1.3. 存在的问题
在算例1中,取aopt=380 m时,B=29.21%;取aopt=520 m时,B=29.62%,两者计算结果非常接近. 可以验证,当取aopt=510 m时,B=30.84%,略优于数解法的计算结果.
当干道存在瓶颈时,解的误差可能会增大. 将算例1中各信号的协调相位绿信比设为45%、30%、60%、30%、55%,生成算例2. 由于数解法求解aopt时不考虑绿信比,因此“b最大”、“
经分析可以发现,经典数解法将求解过程分为2个阶段:第一阶段(步骤1、2)确定最佳理想信号间距,第二阶段(步骤3、4)确定绿波带宽. 其中,第一阶段没有考虑各信号的绿信比,在干道规模小、绿信比普遍较大的情况下,最优解与数解法得到的解相近. 对于交叉口数量多或存在瓶颈路口的情况,绿信比成为影响最优解的重要因素,最优解不再是数解法得到的结果.
2. 改进数解法
2.1. 基本概念
给出几个基本概念及其计算式.
1)偏移绿信比与投影绿信比.
图 4

对于Si,偏移绿信比与理想信号的移动距离l有关. 图5展示了Si与前、后方理想信号同步的情况,纵轴以Si后方最近的初始理想信号位置为原点. 当
图 5

在图5(a)中,
图5(b)中Si与后方的理想信号j同步,此时
偏移绿信比可由式(5)计算:
由于Λi的取值以
2)理想绿灯中心线左/右侧绿信比.
在图4中,理想绿灯中心时刻线将实际信号的绿信比分割为左右2个部分,分别称为左侧绿信比λi,L和右侧绿信比λi,R. Si的左(右)侧绿信比等于
2.2. 绿波带宽度计算表设计
绿波带宽度B为所有信号左侧绿信比的最小值与右侧绿信比的最小值之和:
将式(5)~(7)代入式(8),得到
注意到等式右边两项关于l的斜率为相反数,且l独立于i,可相互抵消,因此将式(9)化简为
式(10)有2个关键参数λi和Λi,两者决定了在给定理想信号位置下的绿波带宽度. 其中λi为常数,Λi会在理想信号向前移动并经过临界位置li,cr时由Λi,f突变为Λi,b. 据此可以得出推论1.
推论1 对于一条干道上的n个信号S1,S2,
根据推论1,设计计算表(如表4所示),用于计算在理想信号移动的过程中投影绿信比和绿波带宽度的变化. 在表4中,第2、3列分别为信号的投影绿信比和绿信比,第4、5列分别为式(10)的MIN函数中的值. 按式(1)、(4)计算各信号的前投影绿信比
表 4 改进数解法的绿波带宽度计算表
Tab.4
| 信号 | Λi | λi | | |
| | | | | |
| | | | | |
| | | | | |
| | | | | |
| | | | | |
| | | | | |
| | | | | |
| | | | | |
2.3. 计算步骤
下面结合算例2展示改进数解法的具体步骤.
1) 计算a行. 如前所述,a在[360,550] m以10 m为步长取值,填入表5.
表 5 算例2各理想信号间距与绿波带宽度对应关系
Tab.5
| a/m | B/% | a/m | B/% | a/m | B/% | ||
| 注:“▲”为最优解标记符号. | |||||||
| 360 | 7.78 | 430 | 13.43 | 500 | 18.00 | ||
| 370 | 11.08 | 440 | 14.77 | 510 | 16.28 | ||
| 380 | 14.21 | 450 | 11.95 | 520 | 14.62 | ||
| 390 | 17.18 | 460 | 9.89 | 530 | 13.02 | ||
| 400 | 20.00 | 470 | 13.83 | 540 | 11.48 | ||
| 410 | 20.42▲ | 480 | 16.66 | 550 | 10.00 | ||
| 420 | 14.28 | 490 | 18.11 | ||||
表 6 算例2中a=410 m时改进数解法绿波带宽计算表
Tab.6
| 信号 | Λi | λi | | |
| S5 | −29.27 | 55 | −1.77 | 56.77 |
| S2 | −17.08 | 30 | −2.08 | 32.08 |
| S4 | −9.76 | 30 | 5.25 | 24.76 |
| S3 | −3.66 | 60 | 26.34 | 33.66 |
| S1 | 0 | 45 | 22.50 | 22.50 |
| S5 | 20.73 | 55 | 48.23 | 6.77 |
| S2 | 32.93 | 30 | 47.93 | −17.93 |
| S4 | 40.25 | 30 | 55.25 | −25.25 |
| S3 | 46.34 | 60 | 76.34 | −16.34 |
表 7 算例2中a=410 m时各理想信号位置下的绿波带宽
Tab.7
| 理想信号位置 | | | B /% |
| 注:“▲”为各方法最优解标记符号 | |||
| l1,cr<l≤l5,cr | −2.08 | 22.5 | 20.42▲ |
| l5,cr<l≤l2,cr | −2.08 | 6.77 | 4.69 |
| l2,cr<l≤l4,cr | 5.24 | −17.92 | −12.68 |
| l4,cr<l≤l3,cr | 22.5 | −25.24 | −2.74 |
| l3,cr<l≤l1,cr+a | 22.5 | −25.24 | −2.74 |
图 6
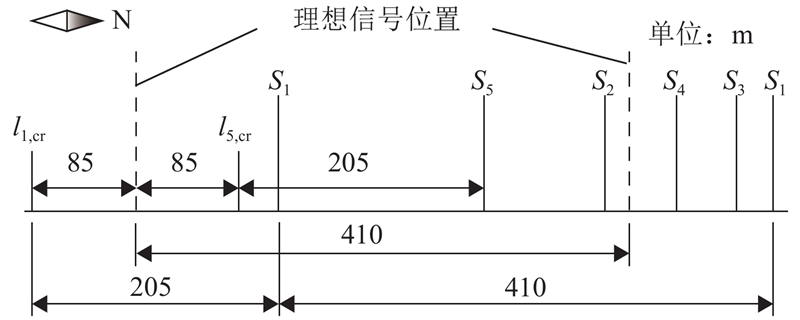
图 6 改进数解法得到的算例2理想信号布置位置
Fig.6 Ideal signal placement of example 2 using improved numerical method
3) 确定最佳周期与带速. 由表5可知,aopt=410 m;取带速为9.5 m/s时,可以设置最佳周期Copt=2×410÷9.5≈86 s.
图 7
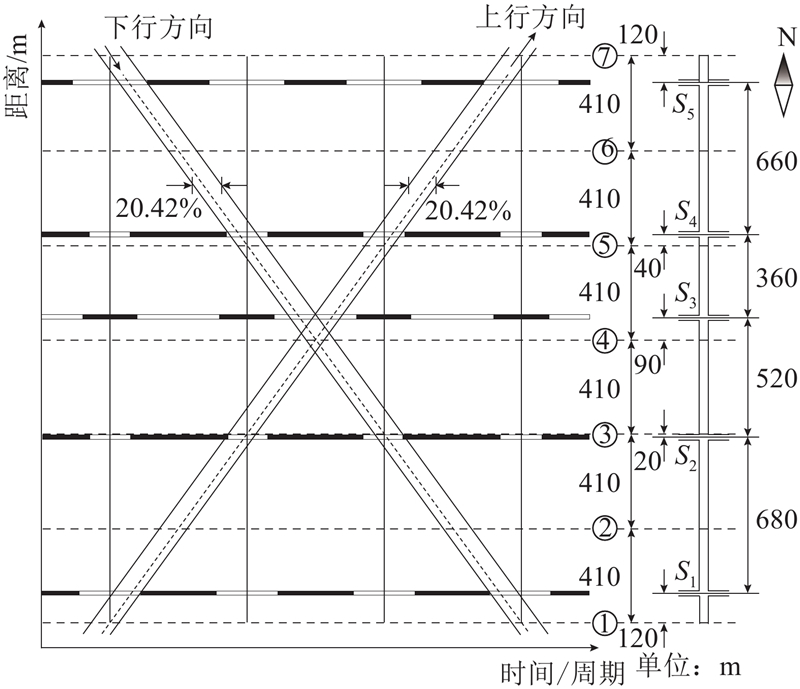
图 7 算例2理想信号位置与绿波控制时距图
Fig.7 Ideal signal position and time-space diagram of example 2
表 8 算例2中a=410 m时的相位差计算
Tab.8
| 信号编号 | 最近理想信号编号 | 相位差/% |
| S1 | ① | 0 |
| S2 | ③ | 0 |
| S3 | ④ | 50 |
| S4 | ⑤ | 0 |
| S5 | ⑦ | 0 |
3. 讨 论
3.1. 与经典数解法的对比
对于算例2,经典数解法与改进数解法实际上得到的相位差结果是相同的,但是绿波带宽度却相差很大. 这是由于两者得到的最佳理想信号间距不同,从而导致设计带速或周期时长不同,使得线控效果出现了显著的区别.
算例3 某干道上有S1~S8共8个信号交叉口,相邻信号间距依次为350、400、160、540、280、280、270 m,各信号协调相位的绿信比分别为65%、60%、65%、65%、60%、55%、50%、70%,初始公共周期C=80 s,设计带速v=11.1 m/s(40 km/h).
设定理想信号间距a的取值为[440−100,440+100] m,步长取10 m,计算结果如表9所示. 当aopt取350 m时,B取到最大值33.6%. 以“b最大”和以“
表 9 算例3各理想信号间距与匹配程度指标对应关系
Tab.9
| a/m | b/m | ba−1/% | dmax/m | B/% |
| 注: “▲”为各方法最优解标记符号. | ||||
| 340 | 140 | 29.4 | 100▲ | 33.1 |
| 350 | 130 | 31.4 | 110 | 33.6▲ |
| 360 | 90 | 37.5 | 135 | 30.0 |
| 370 | 100 | 36.5 | 135 | 24.3 |
| 380 | 110 | 35.5 | 135 | 22.0 |
| 390 | 110 | 35.9 | 140 | 21.6 |
| 400 | 120 | 35.0 | 140 | 22.5 |
| 410 | 130 | 34.1 | 140 | 23.4 |
| 420 | 140 | 33.3 | 140 | 24.2 |
| 430 | 130 | 34.9 | 150 | 24.9 |
| 440 | 120 | 29.4 | 100▲ | 23.2 |
| 450 | 110 | 37.8 | 170 | 22.5 |
| 460 | 120 | 37.0 | 170 | 20.9 |
| 470 | 150 | 34.0 | 160 | 22.7 |
| 480 | 180 | 31.2 | 150 | 23.3 |
| 490 | 210 | 28.6 | 140 | 23.9 |
| 500 | 220▲ | 28.0▲ | 140 | 24.5 |
| 510 | 200 | 30.4 | 155 | 25.1 |
| 520 | 170 | 33.7 | 175 | 25.6 |
| 530 | 140 | 36.8 | 195 | 24.8 |
| 540 | 150 | 36.1 | 195 | 24.2 |
将算例3中初始公共周期设为100 s,其他参数保持不变,生成算例4. 此时a的取值变为[560−100,560+100] m,计算结果见表10. 在这种情况下,经典数解法各求解原则的表现大致相等,与改进数解法得到的最大绿波带之差为3%~5%. 由此可见,经典数解法的3种匹配原则没有绝对的优劣之分,都不能确保找到最优解. 本文提出的改进数解法的效果优于经典数解法.
表 10 算例4各理想信号间距与匹配程度指标对应关系
Tab.10
| a /m | b /m | ba−1 /% | dmax /m | B/% |
| 注:“▲”为各方法最优解标记符号. | ||||
| 460 | 120 | 26.1 | 170 | 20.9 |
| 470 | 150 | 31.9 | 160 | 22.7 |
| 480 | 180 | 37.5 | 150 | 23.3 |
| 490 | 210 | 42.9 | 140▲ | 23.9 |
| 500 | 220 | 44.0▲ | 140▲ | 24.5 |
| 510 | 200 | 39.2 | 155 | 25.1 |
| 520 | 170 | 32.7 | 175 | 25.6 |
| 530 | 140 | 26.4 | 195 | 24.8 |
| 540 | 150 | 27.8 | 195 | 24.2 |
| 550 | 190 | 34.5 | 180 | 24.8 |
| 560 | 210 | 37.5 | 175 | 27.5 |
| 570 | 220 | 38.6 | 175 | 27.9▲ |
| 580 | 190 | 32.8 | 195 | 26.5 |
| 590 | 160 | 27.1 | 215 | 26.2 |
| 600 | 150 | 25.0 | 225 | 25.0 |
| 610 | 140 | 23.0 | 235 | 22.3 |
| 620 | 130 | 21.0 | 245 | 20.5 |
| 630 | 160 | 25.4 | 235 | 22.7 |
| 640 | 190 | 29.7 | 225 | 24.4 |
| 650 | 220 | 33.8 | 215 | 24.0 |
| 660 | 250▲ | 37.9 | 205 | 23.7 |
3.2. 与以往改进数解法的对比
对于一条有n个交叉口的干道,卢凯等[10]提出计算2n−1种绿信比组合下的绿波带宽度并取最大值;王殿海等[12]以车辆每秒行驶的距离(即v)为步长,在0≤l<a下移动理想信号并求最佳位置,移动次数为m(m数值上等于
为了更直观地进行比较,对n的一些取值情况,各方法的运算次数如表11所示(m取40).
表 11 不同n下各方法的运算次数
Tab.11
| n | T1(n) | T2(n) | T3(n) | T4(n) | T4(n)/T1(n) |
| 6 | 745 | 1985 | 2481 | 135 | 18.1% |
| 8 | 1313 | 10497 | 3281 | 213 | 16.2% |
| 10 | 2041 | 52225 | 4081 | 307 | 15.0% |
| 12 | 2929 | 249857 | 4881 | 417 | 14.2% |
4. 结 语
数解法是确定定时式线控系统相位差以实现最大绿波带宽度的简便方法,目标是通过尽量简单的运算解决复杂的绿波带宽度优化问题. 本文提出改进数解法,旨在用尽可能少的运算,解决数解法难以保证解的最优性的问题. 量化描述理想信号的移动方式,提出初始理想信号位置的概念;提出偏移绿信比的新定义,将信号相对于前、后方初始理想信号位置的偏移绿信比分别称为前、后投影绿信比;通过寻找绿波带宽度与前、后投影绿信比的关系,达到快速计算不同理想信号位置下的绿波带宽度的效果,将每个理想信号间距下的计算情况减少到n种;通过设计计算表,避免对绿时损失的重复计算,既减少了计算量,也可以得到最大的绿波带宽度. 数值算例的结果表明改进数解法优于经典数解法. 数解法具有计算简便、易编程等优点,在未来的研究中,如何将数解法拓展到其他场景方面值得进一步研究,如双向不对称放行或单向左转交通流量优先级较高的情况.
参考文献
Synchronizing traffic signals for maximal bandwidth
[J].DOI:10.1287/opre.12.6.896 [本文引用: 2]
MAXBAND: a versatile program for setting signals on arteries and triangular networks
[J].
A multi-band approach to arterial traffic signal optimization
[J].
基于Synchro的相位差优化方法研究——以长安街交叉口为例
[J].DOI:10.3963/j.issn1674-4861.2012.06.024 [本文引用: 1]
Synchro-based offset optimization method: a case study of intersection in Chang’an Avenue
[J].DOI:10.3963/j.issn1674-4861.2012.06.024 [本文引用: 1]
城市主干路交叉口信号协调控制系统设计研究
[J].DOI:10.3969/j.issn.1672-4747.2004.02.005
Research on the design of signal coordination control system in intersections of urban main roads
[J].DOI:10.3969/j.issn.1672-4747.2004.02.005
哈尔滨市红旗大街线控制系统设计
[J].DOI:10.3969/j.issn.1009-671X.2002.05.011 [本文引用: 1]
Design of linear control system in Hongqi Street in Harbin
[J].DOI:10.3969/j.issn.1009-671X.2002.05.011 [本文引用: 1]
经典干道协调控制信号配时数解算法的改进
[J].DOI:10.3969/j.issn.1002-0268.2009.01.022 [本文引用: 11]
Improvement of classical algebraic method of signal timing for arterial road coordinate control
[J].DOI:10.3969/j.issn.1002-0268.2009.01.022 [本文引用: 11]
非对称通行条件下的双向绿波协调控制数解算法
[J].DOI:10.3969/j.issn.1001-7372.2015.06.013 [本文引用: 1]
Algebraic method of bidirectional green wave coordinated control under asymmetric traffic conditions
[J].DOI:10.3969/j.issn.1001-7372.2015.06.013 [本文引用: 1]
交通信号干线协调控制经典数值计算法的改进
[J].
Improvement of classical numerical method for arterial road signal coordinate control
[J].
基于双向最大绿波带宽的通用干道协调控制数解算法
[J].
General algebraic algorithm for arterial coordination control based on maximum bidirectional progression bandwidth
[J].
考虑行车延误的干线协调控制信号配时数解算法
[J].
Improvement of classical algebraic method of signal timing for arterial road coordinate control considering traffic delay
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}