

在国内外众多企业和科研机构的不断努力下,自动驾驶技术在近10年获得了前所未有的高速发展. 由于自动驾驶在安全、效率、环保等方面的巨大优势,很多国家将自动驾驶作为重要的发展战略. 随着车联网技术的进步和人们对于自动驾驶的接受程度的不断提高,自动驾驶汽车的大规模应用或将成为可能. 搭载车联网技术的自动驾驶汽车,成为网联自动车(connected and autonomous vehicle, CAV). 网联自动车驾驶能给城市交通的管理与控制带来巨大的改进空间,例如:可以提供更丰富精准的交通信息便于实时交通流控制,可以精确控制每辆车的行驶轨迹以提高通行效率,可以控制车辆的出发时刻和行驶路径以实现削峰填谷.
许多学者已从多方面对自动驾驶进行研究. 部分学者在自动驾驶条件下,提出新的交叉口管理策略. 如Dresner等[1]提出自动交叉口管理(automatic intersection management,AIM)的单交叉口控制策略,用于替代传统的交叉口信号控制. 自动驾驶车辆在抵达交叉口前向交叉口控制器发送信号预定交叉口通行权,控制器按照先到先得的规则为各方向车辆分配通行权. Hausknecht等[2]将自动交叉口管理控制策略由单个交叉口扩展到多个交叉口,研究基于自动交叉口管理的控制策略对多交叉口网络通行效率的影响. Sun等[3]考虑在自动驾驶条件下,在交叉口采用移位左转的交通组织方式,某方向进口道的车辆可以利用出口车道,从而尽可能多地同时利用车道资源以最大化交叉口通行能力.
部分学者专注于自动驾驶车辆轨迹优化工作. 如Au等[4]在自动交叉口管理下引入设定点算法,为自动车辆生成速度控制点来控制车辆的加减速变化,使汽车能够在给定的时间内以给定的速度到达指定地点,进一步提高使用自动交叉口管理策略交叉口的通行效率. Zhang等[5]将自动驾驶车辆轨迹分解为车道变换和车道保持2个基本操作,针对动态交通环境,提出基于二次优化的静态轨迹规划和动态轨迹规划方法. Luo等[6]根据车辆换道对空间和时间的要求将车辆换道的轨迹规划问题转换为带约束的最优化问题,在保证安全、舒适和效率的前提下对车辆的换道轨迹进行规划,并且可在换道完成前进行实时计算以对换道轨迹进行更新. Li等[7]研究通过多车协同实现多车同时换道的问题,提出多车运行规划方法,该方法分为两阶段,在第1阶段,对所有车辆只进行纵向的速度调整,使所有车辆在纵向上分离,保持较稀疏的车辆分布状态;在第2阶段,在所有车辆纵向分离保证横向换道不发生碰撞的前提下,所有车辆同时进行换道. Lu等[8]在自动驾驶小区域内优化车辆的纵横向轨迹,建立混合整数规划模型,并采用基于滚动时域的方法进行求解.
部分学者沿用现有信号控制,对信号的配时和车辆轨迹进行联合优化. Li等[9]考虑双向冲突的单交叉口,采用滚动时域方法对信号配时和车辆轨迹进行优化,优化目标为平均延误最小. Li等[10]考虑在自动驾驶车辆和人工驾驶汽车并存时,如何合理分配绿灯时间及优化自动车辆轨迹使车辆能够在预定时刻通过交叉口. Feng等[11]对问题进行两阶段建模,在第1阶段,以总延误最小为目标为信号配时优化建立动态规划模型;在第2阶段,优化车辆纵向轨迹,将车流划分为车队,同一车队内的车辆在同一信号周期通过交叉口. Yu等[12]进一步考虑自动车辆的换道行为,建立混合整数线性规划模型以同时优化车辆轨迹和信号配时参数. 模型根据可以接收换道车辆的车道、可以换道的最小间隙等约束给出车辆换道行为的确定方法,在车辆实施换道行为时假设换道是瞬时完成的. 车辆轨迹优化是自动驾驶研究的核心任务之一,在上述研究中,在对车辆的轨迹优化中,大多只考虑纵向轨迹,对于横向轨迹考虑不多或假设横向换道瞬时完成.
本研究采用Xuan等[13]提出的分转向车流串联控制进行全自动驾驶环境下的交叉口车流控制. 开发启发式轨迹优化算法,通过调节车辆的纵横向行驶轨迹,使不同转向的车辆在到达下游交叉口前在纵向上前后分离,并使同一转向的车辆均匀分布在所有进口道上. 分转向车流串联排列可使任一转向的车辆利用所有车道驶离交叉口,从而大幅提高交叉口运行效率.
1. 轨迹控制算法
本研究开发启发式轨迹控制算法. 给定上游来车分布及其转向信息,通过一系列规则确定各车辆在交通流中的相对位置演变过程,直到分转向车流串联排列;基于车辆纵横向行驶规则,计算位置演变过程中每一步骤所需时间;计算从初始状态开始每辆自动车的行驶轨迹.
如图1所示为行驶过程中车辆间的相对位置. 图中,车1、2、3分别表示左转、直行、右转车辆,0表示空位. 不同转向车辆分离的最终目标是所有的车1位于车2前方,所有的车2位于车3前方.
图 1

在轨迹优化算法中定义名词:分隔行. 从第1行开始逐个遍历所有行,当出现车2或车3,停止遍历,将该行作为车1分隔行. 图1中的车1分隔行为第3行. 所有的车1在轨迹优化后应至少行驶至车1分隔行的前一行. 同样可以定义所有车2与所有车3之间的车2分隔行.
1.1. 分转向车流串联排列总体实现过程
1)所有前方无直行车(车2)和右转车(车3)遮挡的左转车(车1)沿本车道行驶至当前车1分隔行前.
2)所有的前方有遮挡的车1前进至所有非车1的前方,并位于本车道前方的最后一辆车1后. 具体分为以下4个步骤:a)从前至后、从左至右逐个遍历直至前方有阻碍的车1;b)车1前方的阻碍车辆为该车1让行,使该车1成为无阻碍车辆;c)该车1前进至所有非车1的前方,并位于本车道前方的最后一辆车1后(若该车1驶离后出现空行,后方车辆向前行驶消除空行);d)重复步骤a)~c),直至所有的车1位于非车1之前.
3)与车1过程相同,使所有的车2位于所有的车3前方(在最后一部分车2前进与车3分离的过程中,所有车3应尽可能的向前行驶,以确保车3在各自车道内紧密排列).
4)伴随车2、3的分离过程,完成所有车1的均匀分布;
5)完成所有车2、3的均匀分布.
1.2. 详细规则
以车1为例介绍关键过程的详细规则,这些规则也同样适用于车2、3.
1.2.1. 无阻碍车辆确定规则
图 2
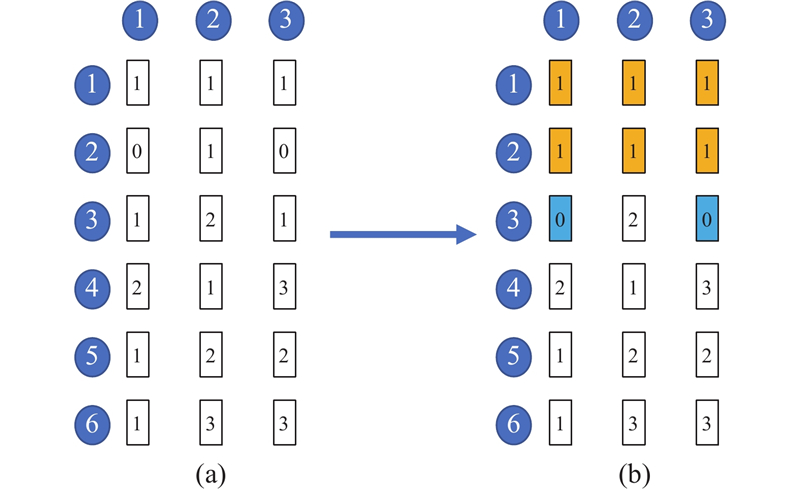
1.2.2. 无阻碍车辆的前进规则
让这些无阻碍的车1前进至所有的非车1的前方,具体前进规则如下. 1)确定基准车道:计算每个车道上无阻碍车1的数量. 将车1数量最大的车道作为基准车道(若有多个车道的车1数量并列最大,则随机抽取其一作为基准车道);2)基准车道车辆排列:将基准车道上的车1紧密逐行排列,且将最后一辆车1位于车1分隔行的前一行;3)非基准车道车辆排列:非基准车道上的车1向前行驶至与基准车道上的车1依次对齐.
图 3
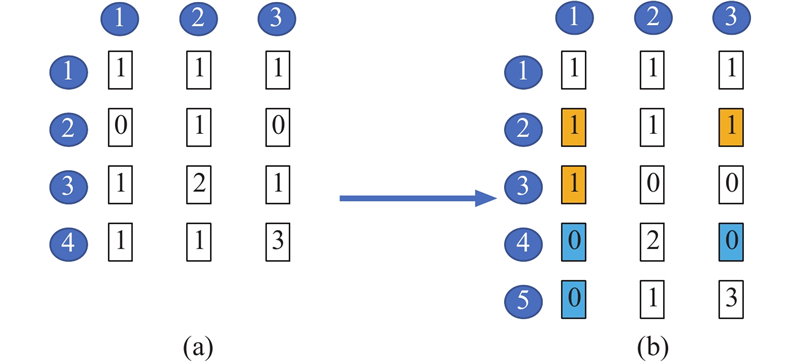
1.2.3. 阻碍车辆的换道规则
为了给车1腾挪出向前行驶的通道,前方阻碍车辆须进行换道操作. 1)阻碍车辆所在行有空间的换道规则. 换道优先级考虑距离和方向两方面,距离近的优先于距离远的,向右的优先于向左的. 以此优先规则搜索行内空位. 将阻碍车辆至该空位之间的所有车辆向空位协同更换一个车道. 如图4(b)所示,第1行第1车道的车2须为后面的车1让出行驶空间. 由于该车右侧有车辆阻挡,且该车位于最左侧车道,无法直接向右侧或左侧更换一个车道;进而向右搜寻空位,发现右侧的第3车道处有空间,于是第1、2车道上的2辆车2同时向右更换一个车道,形成如图4(b)所示的分布. 2)阻碍车辆所在行没有空间的换道规则. 仍然采用向右优先于向左的优先规则. 根据该规则,搜寻与阻碍车辆相邻的车辆. 让该相邻车辆及其前方的所有车辆前进一行,使车1分隔行前多出1行更新为新的车1分隔行,进而阻碍车辆换道填补相邻空位,为车1腾出行驶空间.
图 4

图 4 阻碍车辆所在行有换道空间的示例
Fig.4 Example of lane changing vacancy in row with obstruction vehicle
图 5
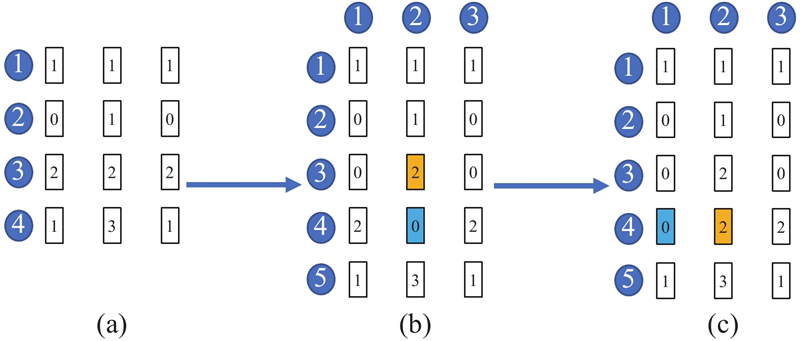
图 5 阻碍车辆所在行无换道空间的示例
Fig.5 Example of no lane changing vacancy in row with obstruction vehicle
1.2.4. 完成车辆分离后的均匀分布
在不同转向车辆完成分离后,须进行紧密排列以减少转向车队长度,从而节省所需绿灯时间. 这一过程被称为车辆在车道间的均匀分布,具体步骤如下. 1)对于标记为1的车辆,查找车1数量最少的车道l(若多个车道的车1数量并列最小,采用右侧优先规则选取最右侧车道作为车道l),将车道l末尾车辆的后一行作为当前换道行. 2)查找车1辆数最多的车道L,将当前换道行中车道L到车道l之间的车辆整体向车道l移动一个车道(若多个车道的车辆数并列最多,采用右侧优先规则选取其中最右侧的车道作为车道L). 3)车道L后方的所有车1前进一行补齐空位(若当前车1分隔行前产生空行,其后方车辆一并前进补齐空位). 4)执行步骤1)~3),直到各车道上车1数量之差小于等于1,称车1均匀分布完成.
图 6
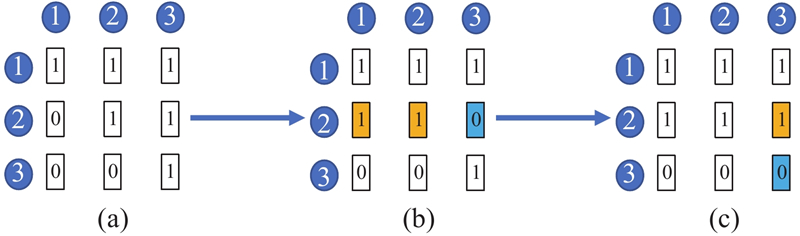
图 6 车辆均匀分布过程示意图
Fig.6 Schematic diagram of even distribution process of vehicles
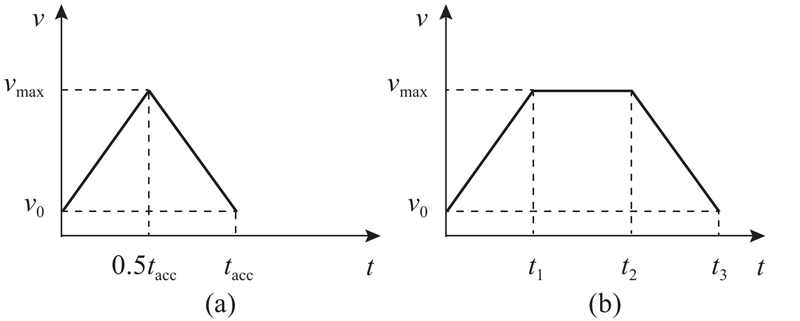
1.2.5. 车辆行驶和计时规则
车辆的排列过程是在车流向前运行过程中完成的. 为了尽量减少车辆排列过程的纵向前进距离,给车流中所有车辆较小的纵向初速度
前后2行车之间的安全车头距离设为
图 7
为了降低排列复杂度,保证行车安全,在算法中横向换道操作和纵向前进操作不能同时发生. 同一次横向换道操作可有多辆车同时进行. 假设单车道宽度为
轨迹控制器根据轨迹控制算法在车流进入路段前计算好各自动车的行驶轨迹,并发送相应指令给自动车. 自动车自上游进入后开始按指令行驶,在达到下游停车线之前尽快完成分转向串联排列.
2. 算 例
双交叉口路网如图8所示,假设所有路段均为双向三车道. 在每个控制周期(信号周期),上游交叉口3个方向的来车在驶入中间路段时汇合为一股车流,数字1、2、3代表在下游交叉口的不同转向. 须将不同转向的车辆在路段中完成分转向串联排列,即所有车1在车2前、所有车2在车3前. 假设初始速度
图 8
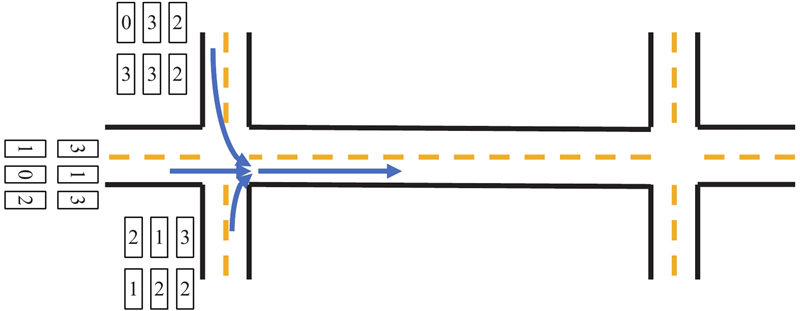
图 8 双交叉口路网驶入车辆初始分布
Fig.8 Initial inflow vehicle distribution in a two-node network
将中间路段入口记为纵向原点. 所有车辆汇入中间路段后对应的初始纵向位置(距原点的纵向距离)如表1所示. 将中间路段最右侧车道边缘记为横向原点,假设车道宽度
表 1 车流汇合后的车辆纵向位置
Tab.1
| 行数 | 车道1 | 车道2 | 车道3 |
| 第1行 | 70 | 70 | 70 |
| 第2行 | 56 | − | 56 |
| 第3行 | 42 | 42 | 42 |
| 第4行 | 28 | 28 | 28 |
| 第5行 | 14 | 14 | 14 |
| 第6行 | − | 0 | 0 |
图 9

表 2 图9(b)中车辆纵向位置
Tab.2
| 行数 | 车道1 | 车道2 | 车道3 |
| 第1行 | − | 116.34 | − |
| 第2行 | − | 102.34 | − |
| 第3行 | 88.34 | − | 88.34 |
| 第4行 | 74.34 | − | 74.34 |
| 第5行 | 60.34 | − | 60.34 |
| 第6行 | 46.34 | 46.34 | 46.34 |
| 第7行 | 32.34 | 32.34 | 32.34 |
| 第8行 | − | 18.34 | 18.34 |
表 3 图9(c)中车辆纵向位置
Tab.3
| 行数 | 车道1 | 车道2 | 车道3 |
| 第1行 | − | 120.34 | − |
| 第2行 | − | 106.34 | − |
| 第3行 | − | 92.34 | 92.34 |
| 第4行 | 78.34 | − | 78.34 |
| 第5行 | 64.34 | − | 64.34 |
| 第6行 | 50.34 | 50.34 | 50.34 |
| 第7行 | 36.34 | 36.34 | 36.34 |
| 第8行 | − | 22.34 | 22.34 |
表 4 图9(g)中车辆纵向位置
Tab.4
| 行数 | 车道1 | 车道2 | 车道3 |
| 第1行 | 312.18 | 312.18 | 312.18 |
| 第2行 | 298.18 | − | − |
| 第3行 | 284.18 | 284.18 | 284.18 |
| 第4行 | 270.18 | 270.18 | − |
| 第5行 | − | − | 256.18 |
| 第6行 | 242.18 | 242.18 | 242.18 |
| 第7行 | 228.18 | − | 228.18 |
| 第8行 | − | 214.18 | − |
表 5 图9(h)中车辆纵向位置
Tab.5
| 行数 | 车道1 | 车道2 | 车道3 |
| 第1行 | 327.16 | 327.16 | 327.16 |
| 第2行 | 313.16 | − | − |
| 第3行 | 299.16 | 299.16 | 299.16 |
| 第4行 | 285.16 | 285.16 | 285.16 |
| 第5行 | 271.16 | 271.16 | 271.16 |
| 第6行 | 257.16 | 257.16 | 257.16 |
图 10
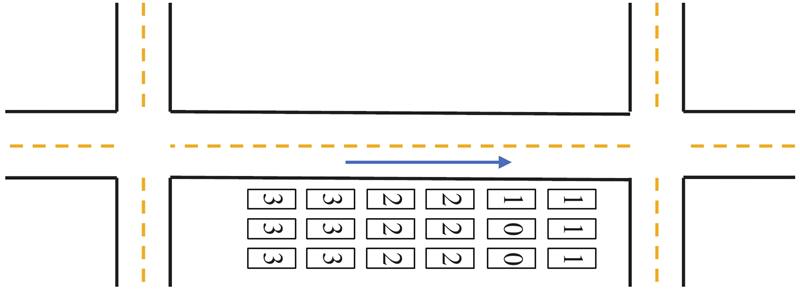
图 11
在车辆从当前车道驶向目标车道的过程中,如果当前车道的车道数(假设为
图 12
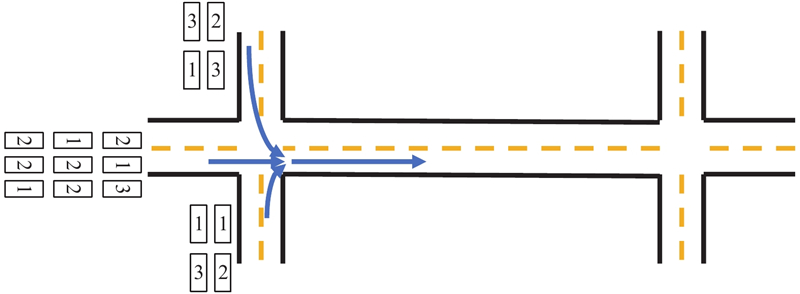
图 12 车道数不同情况下的车辆初始分布
Fig.12 Initial vehicle distribution with different numbers of lanes
图 13

图 13 车道数不同情况下最终分转向串联排列
Fig.13 Final tandem arrangement with different numbers of lanes
图 14
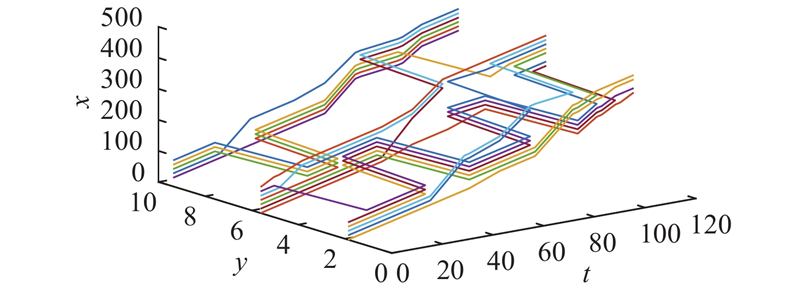
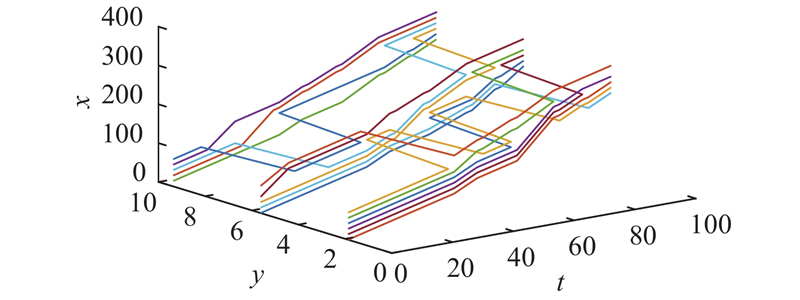
车辆完成目标分转向串联排列所需的行驶距离、行驶时间与车辆速度、车辆数、车辆初始分布等有关. 在车辆数较少、车辆初始分布较简单的情况下,可以在较短的行驶距离和行驶时间内到达目标分布状态;在车辆数较多、车辆初始分布较复杂的情况下,需要较长的行驶距离和行驶时间. 当车辆速度较低时,可以在较短的行驶距离内实现分转向串联排列;车辆速度较高,对路段长度的要求也越高.
3. 结 语
在全自动驾驶环境下,提出启发式的车辆轨迹控制算法,可在上游车辆达到下游停车线之前,在路段中实现分转向车流串联排列,从而实现车流分转向串联控制. 该算法以单条路段上的交通流为优化对象,对于整个交通路网,可采用分布式架构,分别针对每条路段进行并行优化. 算法本身的优势如下:1)计算工作可由位于路侧的轨迹控制器完成,计算速度较快可满足交通流实时控制需求;2)自动车只须按照控制器的轨迹指令完成驾驶任务,无须根据自身实时检测的周遭交通情况计算复杂运动过程,可提高运行效率,且更好地保证车流安全.
本研究侧重于为实现交叉口分转向串联控制而对路段上的CAV车流进行轨迹优化的研究. 在实现不同转向车流串联排列后,即可根据各转向流量,按比例对有效绿灯时间进行分配. 具体方法可以参考Xuan等[13]提出的线性规划方法.
后续可进一步探索道路长度、车道数、道路限速、车辆的初始分布及初始速度对整体车流重新排列过程的影响,也可进一步允许车辆前进和换道操作同时进行以改进算法.
参考文献
A Multiagent approach to autonomous intersection management
[J].DOI:10.1613/jair.2502 [本文引用: 1]
A dynamic automated lane change maneuver based on vehicle-to-vehicle communication
[J].DOI:10.1016/j.trc.2015.11.011 [本文引用: 1]
Balancing computation speed and quality: a decentralized motion planning method for cooperative lane changes of connected and automated vehicles
[J].DOI:10.1109/TIV.2018.2843159 [本文引用: 1]
Trajectory-based traffic management inside an autonomous vehicle zone
[J].DOI:10.1016/j.trb.2018.12.012 [本文引用: 1]
Signal control optimization for automated vehicles at isolated signalized intersections
[J].DOI:10.1016/j.trc.2014.10.001 [本文引用: 1]
Recasting and optimizing intersection automation as a connected-and-automated-vehicle (CAV) scheduling problem: a sequential branch-and-bound search approach in phase-time-traffic hypernetwork
[J].DOI:10.1016/j.trb.2017.09.020 [本文引用: 1]
Spatiotemporal intersection control in a connected and automated vehicle environment
[J].DOI:10.1016/j.trc.2018.02.001 [本文引用: 1]
Integrated optimization of traffic signals and vehicle trajectories at isolated urban intersections
[J].DOI:10.1016/j.trb.2018.04.007 [本文引用: 1]
Increasing the capacity of signalized intersections with separate left turn phases
[J].DOI:10.1016/j.trb.2011.02.009 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}