自动车轨迹优化以实现分转向车流串联交叉口控制
Trajectory optimization of connected and autonomous vehicles to achieve tandem intersection control
自动车轨迹优化以实现分转向车流串联交叉口控制 |
| 郭满,梅振宇,章立辉 |
|
Trajectory optimization of connected and autonomous vehicles to achieve tandem intersection control |
| Man GUO,Zhen-yu MEI,Li-hui ZHANG |
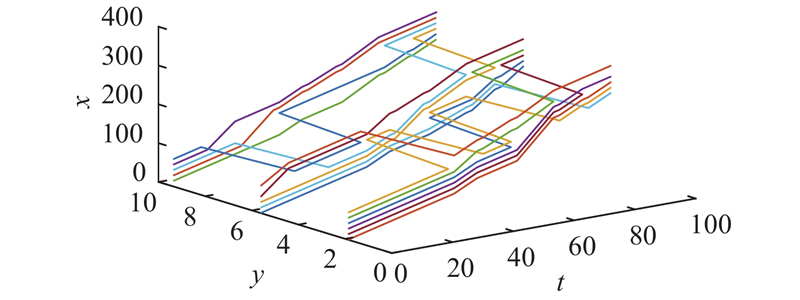
| 图 11 |
| Fig.11 Full trajectories of all vehicles in |
|
|