

提高系统容错能力的前提是实现准确的故障诊断. 故障诊断方法分为基于模型的方法和基于信号的方法[7]. 基于模型的方法需要通过物理原理或系统辨识技术获取实际系统的模型,再进行故障诊断. Lee等[8-9]基于系统的模型,将电机的测量电流与观测器电流比较,以判断电流传感器是否故障. 其中,Lee等[8]针对感应电机直接转矩系统采用自适应增益调度观测器产生冗余,以实现故障诊断;Yu等[9]基于3个自适应全阶观测器进行故障诊断,然而此方法只适用于单个电流传感器故障. Huang等[10]则构造了滑模观测器,实现了永磁同步电机(permanent magnet synchronous machine,PMSM)驱动系统中电流传感器的故障诊断. 基于模型的方法比较依赖于模型的精确性,且计算较为复杂. 基于信号的方法提取包含在测量信号中的故障信息,通过与正常系统特征的对比及对现有症状的分析作出故障判断. Berriri等[11]通过分析现场可编程门阵列中电流矢量的位置误差进行故障判断,然而该方法仅适用于电流滞环控制. Wu等[12]通过提取PMSM驱动系统中的电流和位置信息,设计了电流跟踪算法以进行合理的电流幅值估计,实现了单相或两相电流传感器的故障诊断,然而三相均故障时的情况并未讨论. Khil等[13-14]对电机驱动系统的相电流进行平均归一化处理,实现了电流传感器的故障诊断,并取得了良好成效.
电流传感器的容错控制主要从两方面进行. 一是采用冗余方式安装多个备选的传感器,当故障发生时,迅速从故障传感器切换到备选传感器. 如Meinguet等[15]通过在PMSM驱动系统的逆变器中安装额外的电流传感器以实现故障发生时的硬件冗余. 二是设计合适的观测器,在故障发生时,使用观测器替代故障的电流传感器工作,因而,观测器的可靠性及准确性成为关键. Najafabadi等[16]提出了一种带有转子电阻估计的自适应电流观测器以实现对电流传感器的容错控制,但此方法对随机的系统噪声不具有鲁棒性. Beng等[17]采用卡尔曼滤波器方法对电流和位置传感器故障进行容错,并通过龙伯格观测器来重构故障相电流.
一些工业驱动系统中采用两相电流传感器取代三相传感器,有效削减成本. 然而在如电力牵引、变速风力发电等对安全性和可维护性要求高的场合,与可靠性相比,电流传感器的成本基本可以忽略,因而需要在每一相安装一个电流传感器. 近年,Chakraborty等[18]针对感应电机控制系统中的电流传感器故障,提出了一种新颖的矢量旋转的概念,通过
为此,本文对基于矢量旋转的容故障诊断及错控制方案进行改进,将其应用到带有三相电流传感器的SPMSM驱动系统中,同时采用自适应反推观测器进行电流估计以避免上述问题的产生. 主要思路如下:基于3个不同轴定向的
1. 不同轴定向的坐标变换
假设SPMSM三相绕组对称,将电流传感器安装在
1)按定子
当定子
图 1
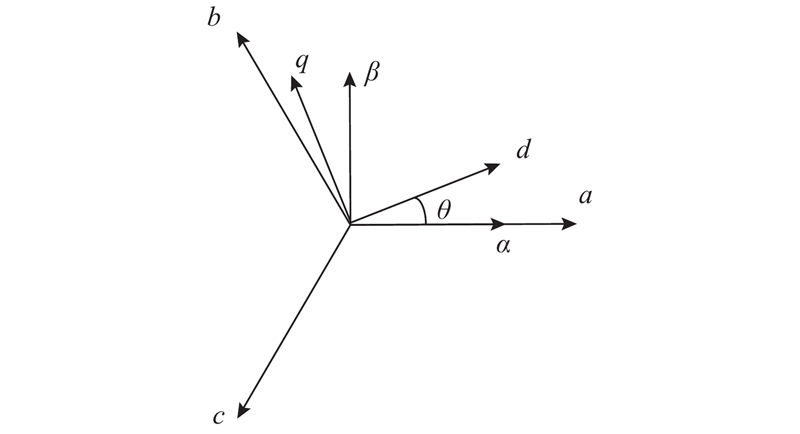
式中:
从式(1)可以发现,
2)按定子
将
图 2
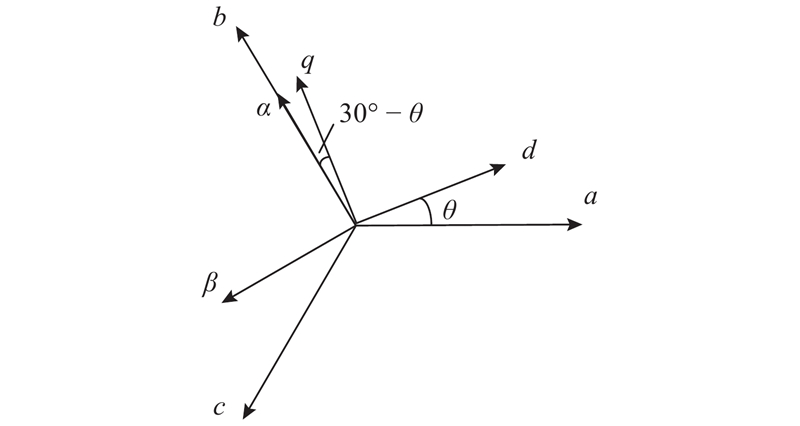
式中:
从式(3)可以发现,
3)按定子
将
图 3
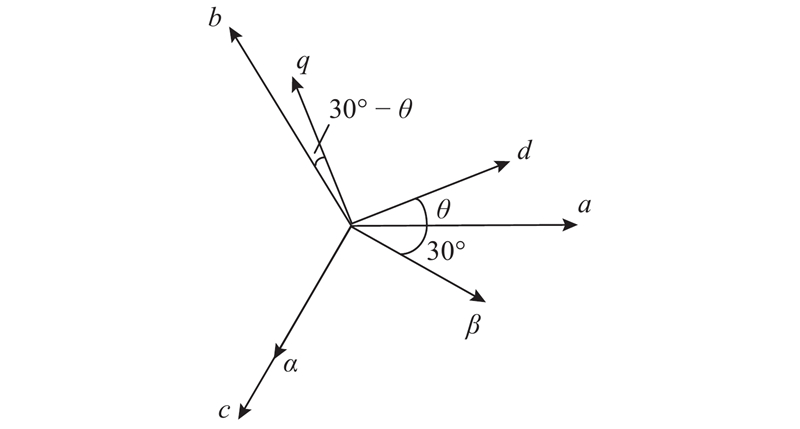
式中:
从式(5)可以发现,
由以上分析可知,当只有一相电流传感器发生故障时,只要从上述3个坐标系中选取1个恰当的坐标系就能够避免故障的影响;当两相故障时,
2. 定子电流观测器设计
2.1. 表贴式永磁同步电机数学模型
在
式中:
电磁转矩方程和机械运动方程分别为
式中:
2.2. 自适应反推观测器
由式(8)和(9)可得转速估计方程为
式中:
由式(7)构造
式中:
将式(10)和(9)及式(11)和(7)分别作差,可得转速估计和电流估计误差方程为
式中:
为使式(12)和(13)收敛,构造Lyapunov函数:
式中:
对式(14)和(15)求导,并分别代入式(12)和式(13)可得
根据Lyapunov稳定性理论,当满足
式中:
由式(18)~(20)可得转速估计和电流估计误差能收敛的条件为
式中:
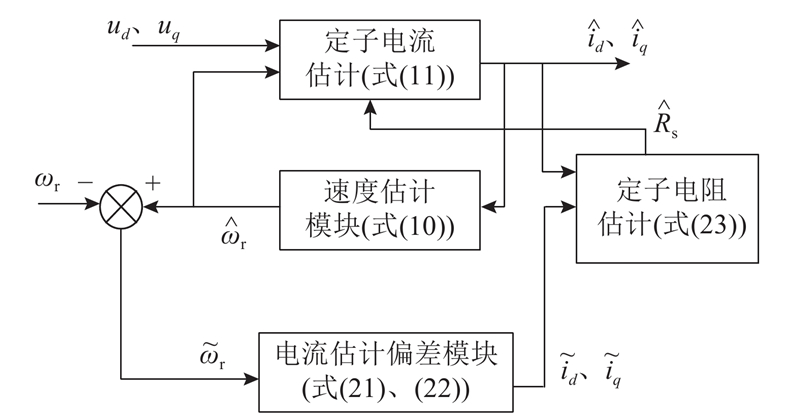
自适应反推观测器的结构框图如图4所示. 对
图 4
1)在坐标系Ⅰ下,
2)在坐标系Ⅱ下,
3)在坐标系Ⅲ下,
3. 故障诊断及容错控制方案
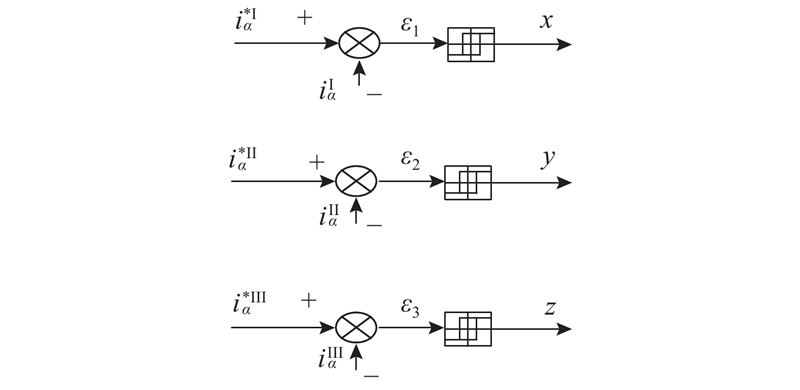
3.1. 定子电流传感器故障诊断策略
令
进行如下判断:
判断1:若
判断2:若
判断3:若
式中:
1)当电流传感器正常时,
式中:
2)当电流传感器故障时,
上述
综合考虑各种可能造成的误差因素后,选取安全阈值约为0.13
图 5
3.2. 容错控制策略
当单相或两相电流传感器故障时,通过
图 6
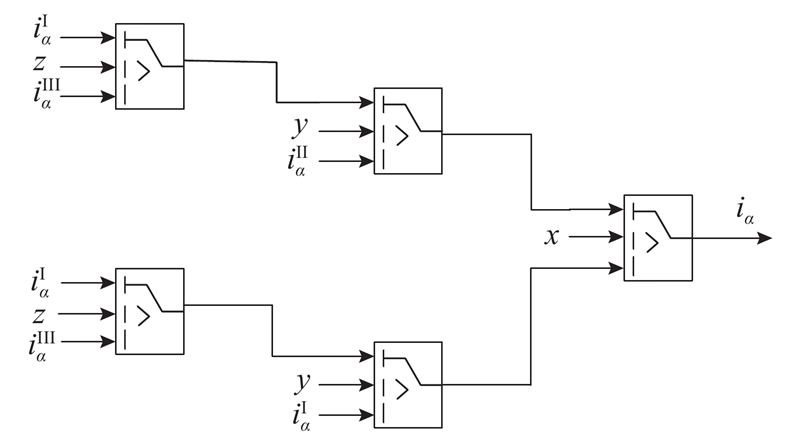
图 6
Fig.6
Diagram of
单相或两相电流传感器故障时,由于
首先对
图 7
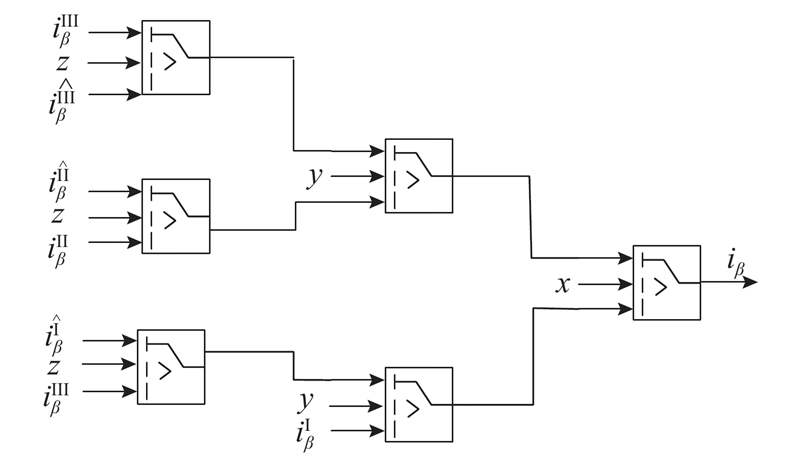
图 7
Fig.7
Diagram of
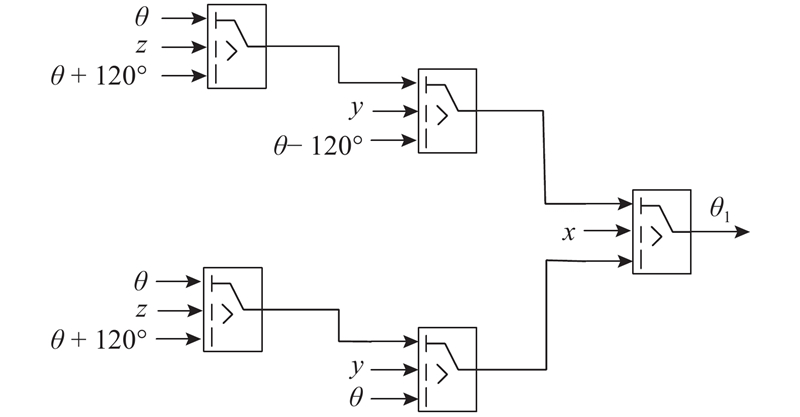
电角度逻辑判断图如图8所示. 其逻辑判断过程与前述
图 8
令
图 9
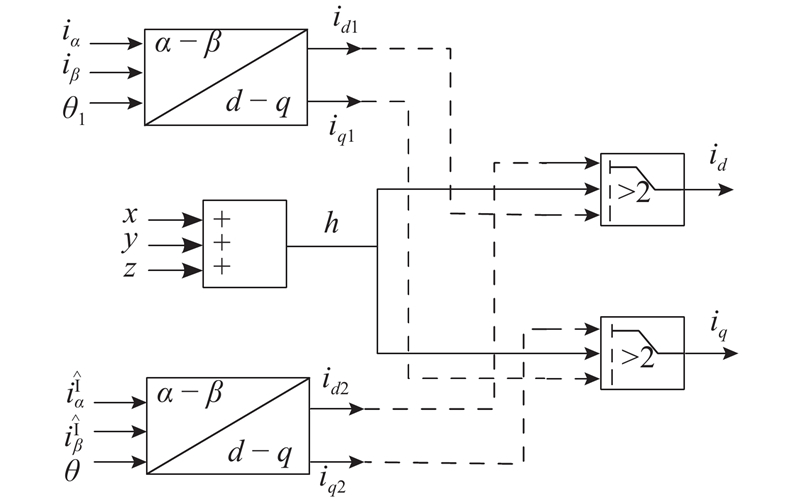
图 9
Fig.9
Diagram of
表 1 容错策略逻辑判断表
Tab.1
| x | y | z | a相 | b相 | c相 | α轴 | β轴 | 电角度 |
| 0 | 0 | 0 | 正常 | 正常 | 正常 | | | |
| 1 | 0 | 0 | 故障 | 正常 | 正常 | | | |
| 0 | 1 | 0 | 正常 | 故障 | 正常 | | | |
| 0 | 0 | 1 | 正常 | 正常 | 故障 | | | |
| 1 | 1 | 0 | 故障 | 故障 | 正常 | | | |
| 1 | 0 | 1 | 故障 | 正常 | 故障 | | | |
| 0 | 1 | 1 | 正常 | 故障 | 故障 | | | |
| 1 | 1 | 1 | 故障 | 故障 | 故障 | | | |
4. 仿真及实验研究
4.1. 仿真结果
图 10
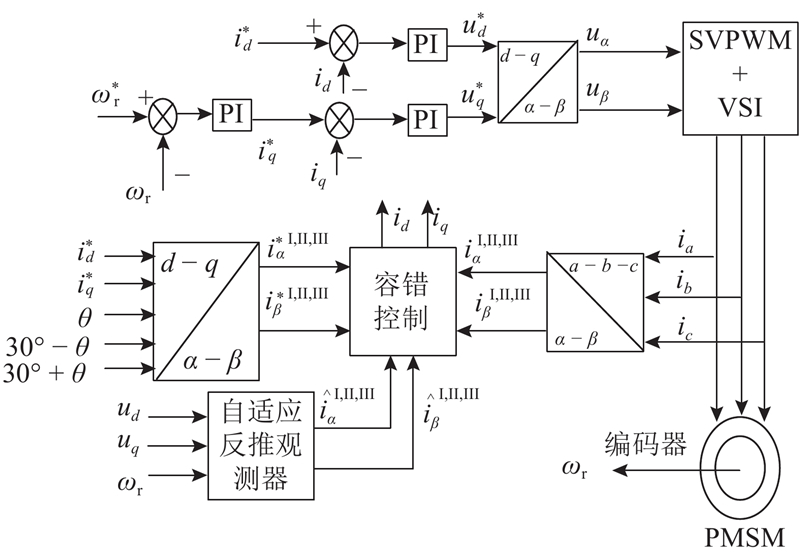
表 2 表贴式永磁同步电机(PMSM)参数
Tab.2
| 参数 | 含义 | 数值 | 单位 |
| | 额定功率 | 1.5 | |
| | 额定转速 | 1 000 | |
| | 额定相电流 | 6.76 | |
| | 额定转矩 | 14.32 | |
| | 定子电阻 | 1.79 | |
| | 交轴电感 | 6.68 | |
| | 直轴电感 | 6.68 | |
| | 转动惯量 | 17.92 | |
| | 极对数 | 4 | − |
系统空载启动,在0.2 s时加入5
图 11

图 11 三相电流传感器故障仿真效果
Fig.11 Simulation results under fault in three-phase current sensors
由图11表明,在0.4 s时,
4.2. 实验结果
为了进一步验证理论分析的正确性和电流重构策略的合理性,构建以dSPACE1007为核心的实验平台. 为测试电机的带载能力,将2台永磁同步电机组成对拖装置,并用2台伺服驱动器分别控制. 图12为基于dSPACE1007的表贴式永磁同步电机实验平台.
图 12

图 12 基于dSPACE1007的永磁同步电机实验平台
Fig.12 Experimental platform of permanent magnet synchronous motor experimental based on dSPACE1007
给定电机空载起动转速为500 r/min,4 s后加入5
图 13

图 13 三相电流传感器故障实验结果
Fig.13 Experimental results under fault in three-phase current sensors
综上,实验结果和仿真结果均验证了所提出的故障诊断及容错控制策略的有效性,在三相电流传感器故障时快速而准确地检测出故障相,并依据所提容错控制策略,稳定地重构电流,使系统安全地运行.
5. 结 语
本文针对永磁同步电机矢量控制系统,提出了电流传感器故障时的容错控制方案. 基于3个不同轴定向坐标系得到了
参考文献
Steady-state and transient operation of IPMSMs under maximum-torque-per-ampere control
[J].DOI:10.1109/TIA.2009.2036665 [本文引用: 1]
Standards for efficiency of electric motors
[J].
应用滑模控制的四开关逆变器PMSM系统FCS-MPC策略
[J].
FCS-MPC strategy with sliding mode control for PMSM systems driven by four-switch inverters
[J].
A fault tolerant permanent-magnet traction module for subway applications
[J].
Design of a fault tolerant controller based on observers for a PMSM drive
[J].
Advances in diagnostic techniques for induction machines
[J].DOI:10.1109/TIE.2008.2007527 [本文引用: 1]
A survey of fault diagnosis and fault tolerant techniques. Part I: fault diagnosis with model-based and signal-based approaches
[J].
Instrument fault detection and compensation scheme for direct torque controlled induction motor drives
[J].
Speed and current sensors fault detection and isolation based on adaptive observers for induction motor drivers
[J].
Current sensor fault diagnosis based on a sliding mode observer for PMSM driven systems
[J].DOI:10.3390/s150511027 [本文引用: 1]
Field programmable gate array-based fault tolerant hysteresis current control for AC machine drives
[J].DOI:10.1049/iet-epa.2011.0053 [本文引用: 1]
A signal-based fault detection and tolerance control method of current sensor for PMSM drive
[J].
Current sensor fault detection and isolation method for PMSM drives, using average normalised currents
[J].DOI:10.1049/el.2016.2198 [本文引用: 1]
A new approach for current sensor fault diagnosis in PMSG drives for wind energy conversion systems
[J].DOI:10.1109/TIA.2013.2271992 [本文引用: 1]
Detection and isolation of speed-, dc-link voltage-, and current-sensor faults based on an adaptive observer in induction-motor drives
[J].DOI:10.1109/TIE.2010.2055775 [本文引用: 1]
A sensor fault detection and isolation method in interior permanent-magnet synchronous motor drives based on an extended Kalman filter
[J].
Speed and current sensor fault detection and isolation technique for induction motor drive using axes transformation
[J].DOI:10.1109/TIE.2014.2345337 [本文引用: 1]
基于电流估计的永磁同步电机矢量控制
[J].
Vector control of PMSM based on the current estimate
[J].
High-performance current-sensorless drive for PMSM and SynRM with only low-resolution position sensor
[J].DOI:10.1109/TIA.2003.811782 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}