|
|
|
| Gait planning of quadruped robot based on divergence component of motion |
Ming-min LIU1,2,3( ),Dao-kui QU1,2,4,Fang XU1,2,4,*(),Feng-shan ZOU1,2,4,Kai JIA1,2,4,Ji-lai SONG4 ),Dao-kui QU1,2,4,Fang XU1,2,4,*(),Feng-shan ZOU1,2,4,Kai JIA1,2,4,Ji-lai SONG4 |
1. State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
2. Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110016, China
3. University of Chinese Academy of Sciences, Beijing 100049, China
4. Shenyang SIASUN Robot and Automation Co. Ltd, Shenyang 110168, China |
|
|
|
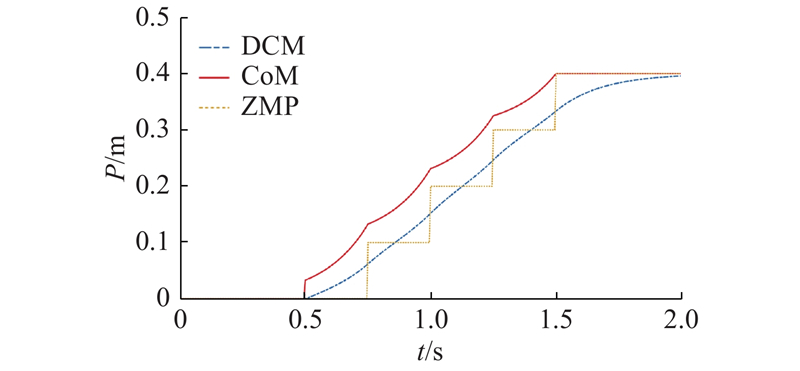
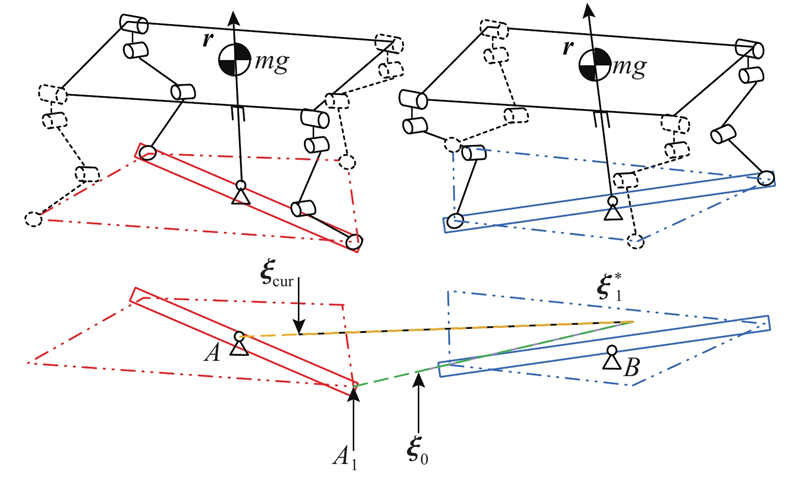
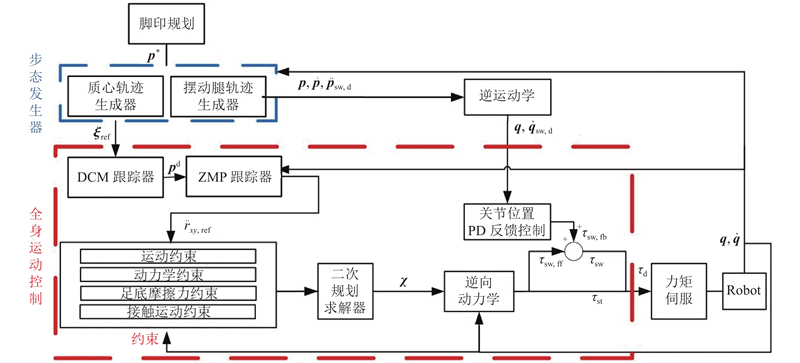
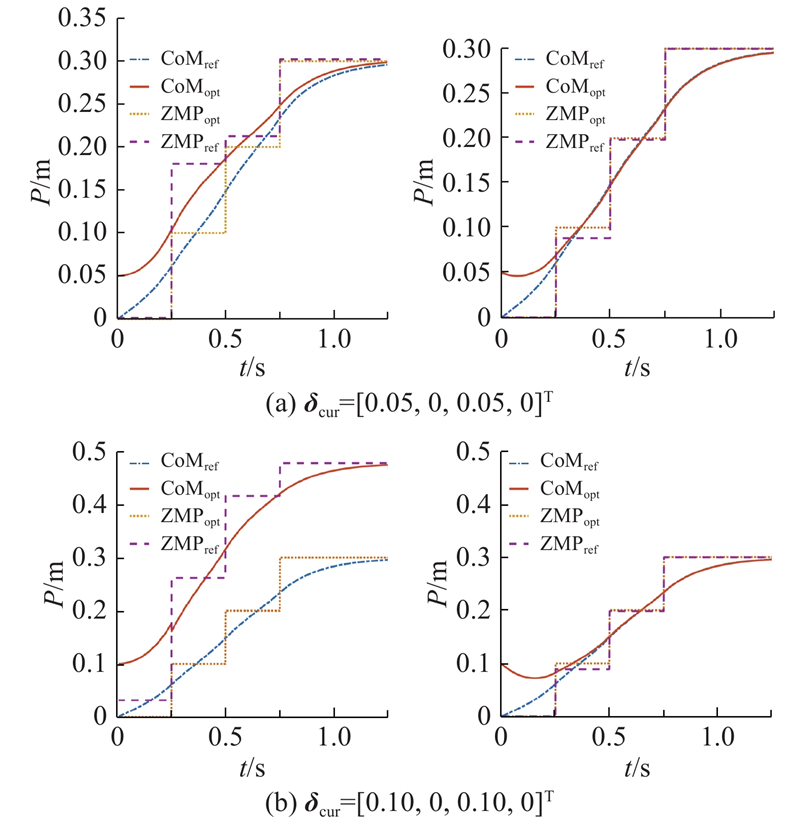
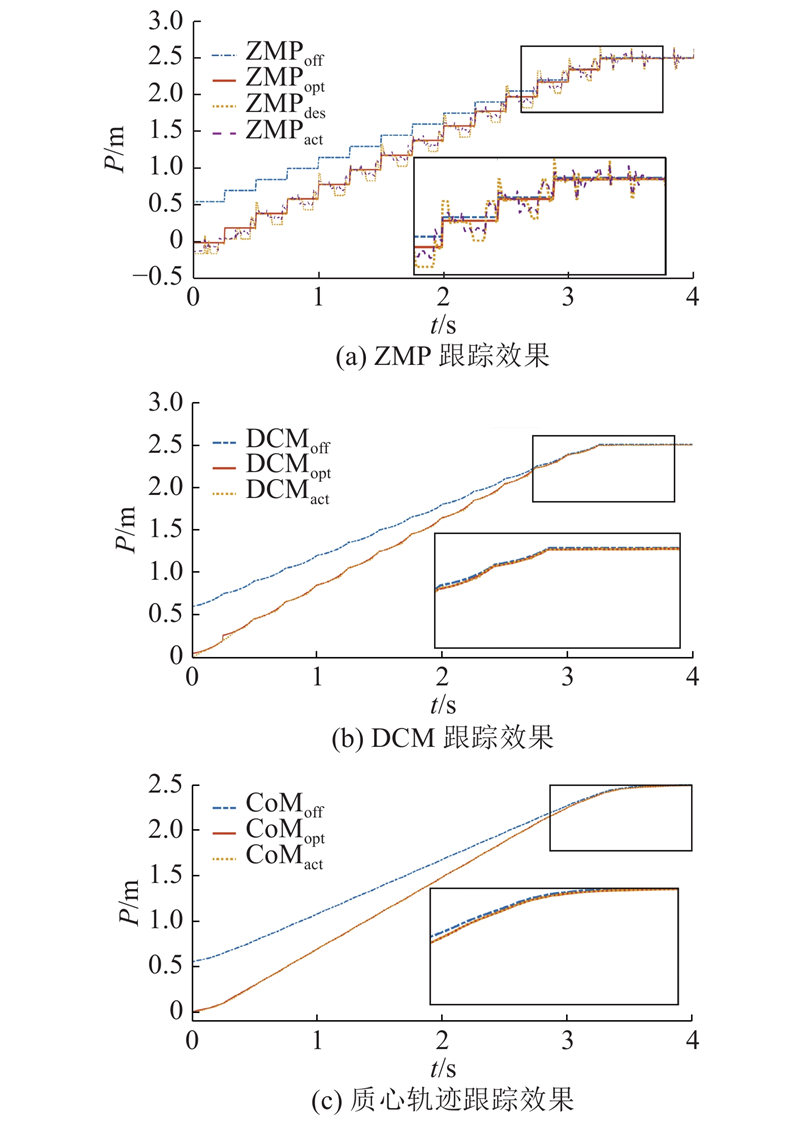
Abstract An online gait planning method based on the divergence component of motion (DCM) was proposed in order to make the quadruped robot move stably when a large trajectory tracking error occurs. The quadruped robot was simplified into a 3D linear inverted pendulum model (LIPM). The DCM methodology was used to calculate the reference trajectory that keeps the DCM bounded according to the footprint of offline planning. Gait planning applied loose initial state model predictive control to optimize the footprint and desired state trajectory that can quickly converge to the reference trajectory online, under the condition of satisfying the stride constraints and zero moment point (ZMP) constraints. The whole body control was used to optimize the torque to track the trajectory of the desired state under the conditions of motion constraints, dynamic constraints, and friction constraints by constructing a quadratic program. The above algorithm was verified by simulation and results show that loose initial state model predictive control can tolerate larger trajectory tracking errors compared with traditional model predictive control and the quadruped robot can move steadily in troting gait and converge to the reference trajectory as soon as possible when a large trajectory tracking error of DCM occurs.
|
|
Received: 17 March 2020
Published: 09 March 2021
|
|
|
| Fund: 国家重点研发计划资助项目(2017YFC0806700);山东省重大科技创新工程资助项目(2019JZZY010128) |
|
Corresponding Authors:
Fang XU
E-mail: liumingmin@siasun.com;xufang@sia.cn
|
基于运动发散分量的四足机器人步态规划
为了使四足机器人在出现较大的轨迹跟踪误差时仍然可以稳定运动,提出基于运动发散分量(DCM)的在线步态规划方法. 将四足机器人抽象成三维线性倒立摆模型(LIPM),根据离线规划的落脚点,应用DCM方法论递推出保持DCM有界的参考轨迹;在满足步幅约束、零力矩点(ZMP)约束的条件下,步态规划运用宽松初始状态模型预测控制在线优化出可快速收敛到参考轨迹上的落脚点以及期望状态轨迹;全身运动控制器通过构建二次规划优化出满足运动约束、动力学约束、摩擦力约束等条件下跟踪期望状态轨迹的力矩. 通过仿真验证以上算法,仿真结果表明:与经典模型预测控制相比,宽松初始状态模型预测控制可以承受较大的轨迹跟踪误差,四足机器人可以在出现较大的轨迹跟踪误差时以troting步态稳定运动并尽快收敛到离线规划的轨迹上.
关键词:
四足机器人,
步态规划,
运动发散分量(DCM),
线性倒立摆模型(LIPM),
零力矩点(ZMP)
|
|
| [1] |
JOE H M, OH J H Balance recovery through model predictive control based on capture point dynamics for biped walking robot[J]. Robotics and Autonomous Systems, 2018, 105: 1- 10
doi: 10.1016/j.robot.2018.03.004
|
|
|
| [2] |
KAJITA S, KANEHIRO F, KANEKO K, et al. The 3D linear inverted pendulum mode: a simple modeling for a biped walking pattern generation [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Maui: IEEE, 2001, 1: 239-246.
|
|
|
| [3] |
易江, 朱秋国, 吴俊, 等 基于最优控制的仿人机器人行走振动抑制[J]. 机器人, 2018, 40 (2): 129- 135
YI Jiang, ZHU Qiu-guo, WU Jun, et al Walking vibration suppression for humanoid robot based on optimal control[J]. Robot, 2018, 40 (2): 129- 135
|
|
|
| [4] |
KAJITA S, KANEHIRO F, KANEKO K, et al. Biped walking pattern generation by using preview control of zero-moment point [C]// IEEE International Conference on Robotics and Automation. Taipei: IEEE, 2003, 2: 1620-1626.
|
|
|
| [5] |
WIEBER P B. Trajectory free linear model predictive control for stable walking in the presence of strong perturbations [C]// IEEE-RAS International Conference on Humanoid Robots. Genova: IEEE, 2006: 137-142.
|
|
|
| [6] |
FENG S, WHITMAN E, XINJILEFU X, et al Optimization-based full body control for the DARPA robotics challenge[J]. Journal of Field Robotics, 2015, 32 (2): 293- 312
doi: 10.1002/rob.21559
|
|
|
| [7] |
KAMIOKA T, KANEKO H, TAKENAKA T, et al. Simultaneous optimization of ZMP and footsteps based on the analytical solution of divergent component of motion [C]// IEEE International Conference on Robotics and Automation. Brisbane: IEEE, 2018: 1763-1770.
|
|
|
| [8] |
HOF A L The ‘extrapolated center of mass’ concept suggests a simple control of balance in walking[J]. Human Movement Science, 2008, 27 (1): 112- 125
doi: 10.1016/j.humov.2007.08.003
|
|
|
| [9] |
PRATT J, CARFF J, DRAKUNOV S, et al. Capture point: a step toward humanoid push recovery [C]// IEEE-RAS International Conference on Humanoid Robots. Genova: IEEE, 2006: 200-207.
|
|
|
| [10] |
LANARI L, HUTCHINSON S, MARCHIONNI L. Boundedness issues in planning of locomotion trajectories for biped robots [C]// IEEE-RAS International Conference on Humanoid Robots. Madrid: IEEE, 2014: 951-958.
|
|
|
| [11] |
WANG H, ZHAO M. A robust biped gait controller using step timing optimization with fixed footprint constraints [C]// IEEE International Conference on Robotics and Biomimetics. Macau: IEEE, 2017: 1787-1792.
|
|
|
| [12] |
KHADIV M, KLEFF S, HERZOG A, et al. Stepping stabilization using a combination of dcm tracking and step adjustment [C]// International Conference on Robotics and Mechatronics. Tehran: IEEE, 2016: 130-135.
|
|
|
| [13] |
ENGLSBERGER J, OTT C. Integration of vertical com motion and angular momentum in an extended capture point tracking controller for bipedal walking [C]// IEEE-RAS International Conference on Humanoid Robots. Osaka: IEEE, 2012: 183-189.
|
|
|
| [14] |
VUKOBRATOVI M, BOROVAC B Zero-moment point: thirty five years of its life[J]. International Journal of Humanoid Robotics, 2004, 1 (1): 157- 173
doi: 10.1142/S0219843604000083
|
|
|
| [15] |
BELLICOSO C D, JENELTEN F, GEHRING C, et al Dynamic locomotion through online nonlinear motion optimization for quadrupedal robots[J]. IEEE Robotics and Automation Letters, 2018, 3 (3): 2261- 2268
doi: 10.1109/LRA.2018.2794620
|
|
|
| [16] |
MISTRY M, BUCHLI J, SCHAAL S. Inverse dynamics control of floating base systems using orthogonal decomposition [C]// IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 3406-3412.
|
|
|
| [17] |
陈腾, 李贻斌, 荣学文 四足机器人动步态下实时足底力优化方法的设计与验证[J]. 机器人, 2019, 41 (3): 307- 316
CHEN Teng, LI Yi-bin, RONG Xue-wen Design and verification of real-time plantar force optimization for quadruped robots in dynamic gait[J]. Robot, 2019, 41 (3): 307- 316
|
|
|
| [18] |
张国腾, 荣学文, 李贻斌, 等 基于虚拟模型的四足机器人对角小跑步态控制方法[J]. 机器人, 2016, 38 (1): 64- 74
ZHANG Guo-teng, RONG Xue-wen, LI Yi-bin, et al Control of the quadrupedal trotting based on virtual model[J]. Robotics, 2016, 38 (1): 64- 74
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|