|
|
|
| Constant torque flux-weakening control strategy of hub motor for electric drive vehicle |
Qi-jin ZHAO1( ),Zi-li LIAO1,*(),Cheng-lin MIAO2,Chun-guang LIU1,Jian-yi XIE1,Li-chun CAI1 ),Zi-li LIAO1,*(),Cheng-lin MIAO2,Chun-guang LIU1,Jian-yi XIE1,Li-chun CAI1 |
1. Weapons and Control Department, Army Academy of Armored Forces, Beijing 100072, China
2. Troop No. 96901 of PLA, Beijing 100089, China |
|
|
|
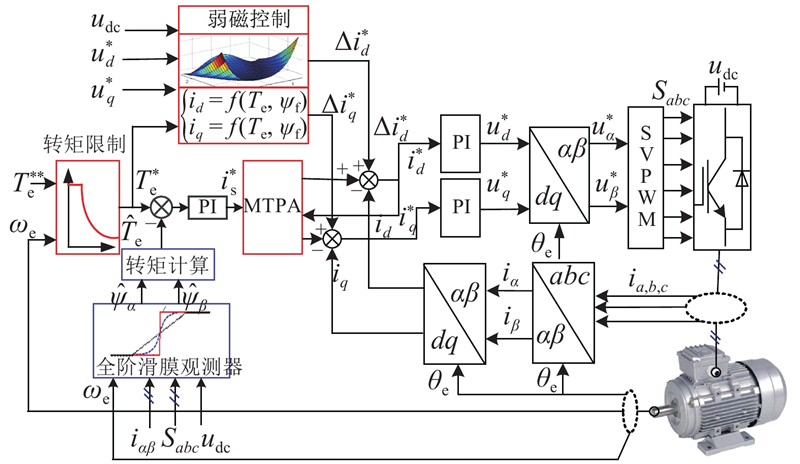
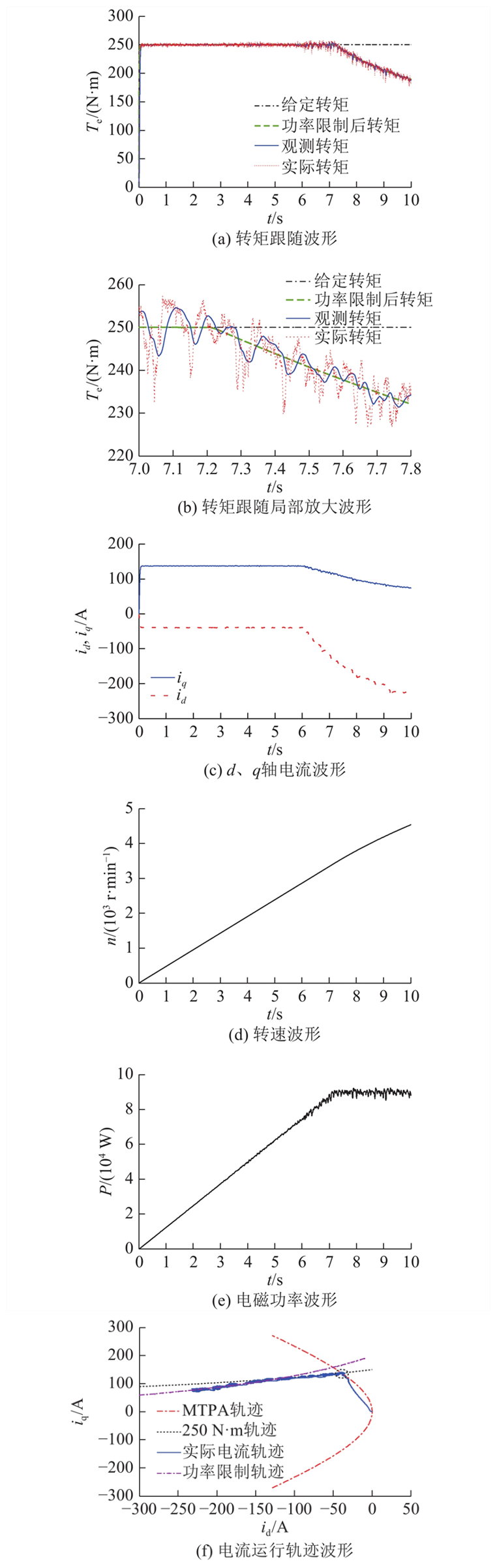
Abstract The advanced vector control scheme was analyzed in order to realize the high-performance control of hub motor for electric drive armored vehicle. The torque control mode was adopted and an electromagnetic torque estimation method based on full-order sliding mode observer was proposed in order to obtain good dynamic performance of torque and speed. The maximum torque per ampere (MTPA) control strategy was used below the base speed in the driving system. When the speed is above the base speed, a novel current compensation flux-weakening control scheme combining constant torque feedforward with voltage feedback was proposed according to the control requirements of hub motor. The experiment was conducted based on a 90 kW interior permanent magnet synchronous motor (IPMSM). The experimental results showed that the designed torque observer ensured high observation accuracy and the error was controlled within 5 N·m. The motor’s torque following performance was good and the error was kept within 5%. The motor can smoothly transit from MTPA to flux-weakening mode, and strictly run according to the planned flux-weakening route. The motor has good torque following and fast speed response during operation, which can meet the control requirements of electric drive vehicles.
|
|
Received: 07 September 2019
Published: 27 January 2021
|
|
|
|
Corresponding Authors:
Zi-li LIAO
E-mail: zqj563954008@163.com;ljzjbxy_@sohu.com
|
电传动车辆轮毂电机恒转矩弱磁控制策略
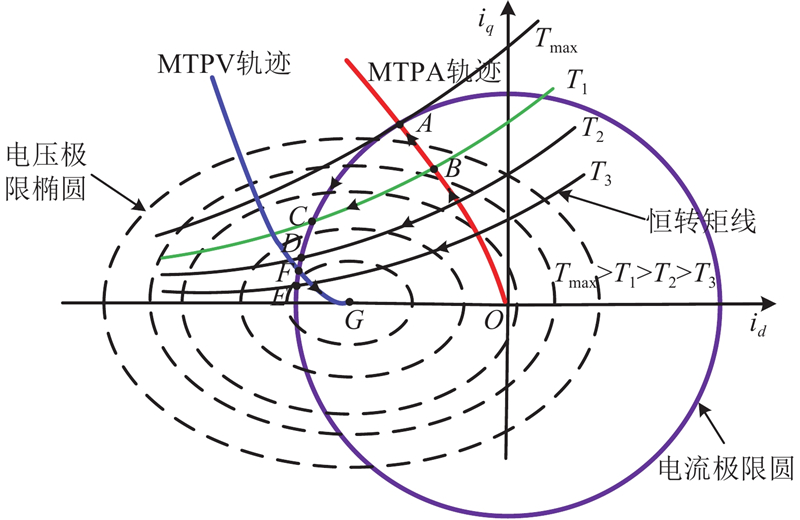
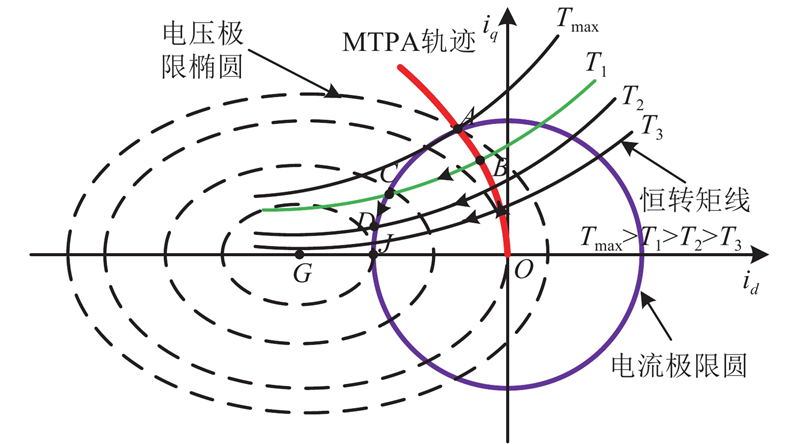
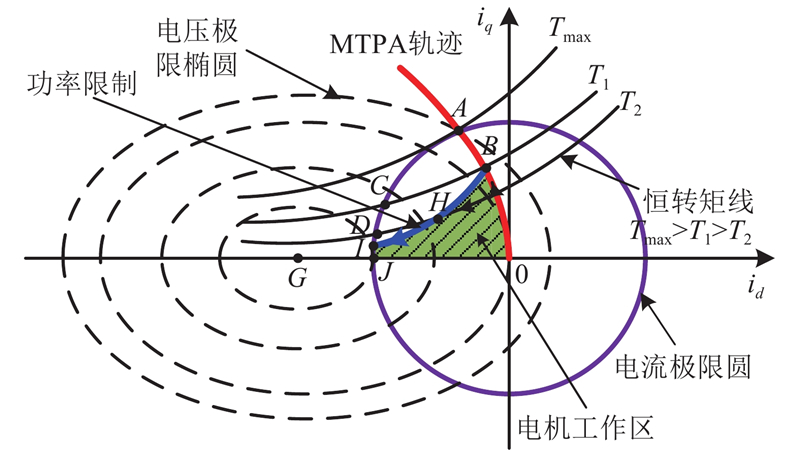
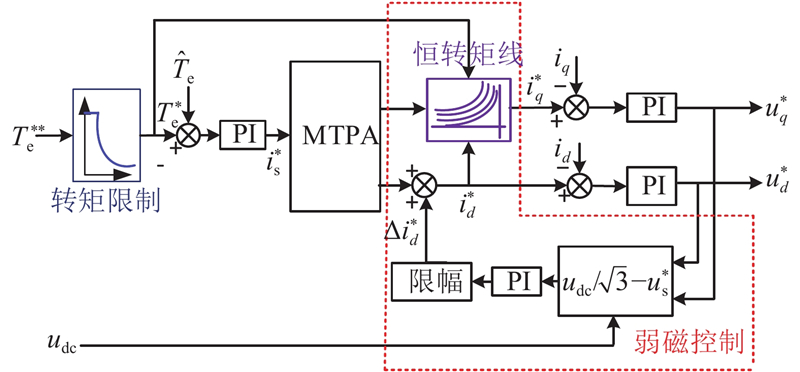
为了实现电传动装甲车用轮毂电机的高性能控制,开展先进的矢量控制方案研究. 为了获得良好的转矩、转速动态性能,采用转矩控制模式,设计基于全阶滑模观测器的电磁转矩估计方法. 基速以下,驱动系统采用最大转矩电流比(MTPA)控制策略,当转速大于基速时,结合轮毂电机的控制需求,提出并设计新颖的恒转矩前馈结合电压反馈的电流补偿弱磁控制方案. 基于90 kW内置式永磁同步电机(IPMSM)开展实验研究. 结果表明,所设计的转矩观测器能够保证较高的观测精度,误差基本小于5 N·m;电机转矩的跟随性能较好,动态误差小于5%;电机能够由MTPA运行模式平滑过渡到弱磁模式,严格按照所规划的弱磁路线运行. 在运行过程中,轮毂电机的转矩控制性能良好,转速响应快,能够满足电传动车辆的控制需求.
关键词:
轮毂电机,
转矩控制,
全阶滑模观测器,
转矩估计,
恒转矩弱磁
|
|
| [1] |
马晓军, 袁东, 项宇, 等 陆战平台综合电力系统及其关键技术研究[J]. 兵工学报, 2017, 38 (2): 396- 406
MA Xiao-jun, YUAN Dong, XIANG Yu, et al Research on integrated power system and its key techniques of ground combat platform[J]. Acta Armamentarii, 2017, 38 (2): 396- 406
doi: 10.3969/j.issn.1000-1093.2017.02.026
|
|
|
| [2] |
廖自力, 阳贵兵, 高强, 等 多轮独立电驱动车辆转向稳定性集成控制研究[J]. 兵工学报, 2017, 38 (5): 833- 842
LIAO Zi-li, YANG Gui-bing, GAO Qiang, et al Research on integrated control of steering stability of multi-wheel independent electric drive vehicle[J]. Acta Armamentarii, 2017, 38 (5): 833- 842
doi: 10.3969/j.issn.1000-1093.2017.05.001
|
|
|
| [3] |
LIU H, ZHU Z Q, MOHAMED E, et al Flux-weakening control of nonsalient pole PMSM having large winding inductance, accounting for resistive voltage drop and inverter nonlinearities[J]. IEEE Transactions on Power Electronics, 2012, 27 (2): 942- 952
doi: 10.1109/TPEL.2011.2159398
|
|
|
| [4] |
盛义发, 喻寿益, 桂卫华, 等 轨道车辆用永磁同步电机系统效率优化智能集成控制研究[J]. 中南大学学报: 自然科学版, 2010, 41 (6): 2252- 2257
SHENG Yi-fa, YU Shou-yi, GUI Wei-hua, et al Efficiency optimization of permanent magnet synchronous motor for rail vehicles based on intelligent integrated control[J]. Journal of Central South University: Science and Technology, 2010, 41 (6): 2252- 2257
|
|
|
| [5] |
INOUE Y, MORIMOTO S, SANADA M Comparative study of PMSM drive systems based on current control and direct torque control in flux-weakening control region[J]. IEEE Transactions on Industry Applications, 2013, 48 (6): 2382- 2389
|
|
|
| [6] |
赵凯辉, 陈特放, 张昌凡, 等 IPMSM非奇异快速终端滑模无速度传感器转矩控制[J]. 仪器仪表学报, 2015, 36 (2): 294- 303
ZHAO Kai-hui, CHEN Te-fang, ZHANG Chang-fan, et al Sensorless and torque control of IPMSM applying NFTSMO[J]. Chinese Journal of Scientific Instrument, 2015, 36 (2): 294- 303
|
|
|
| [7] |
VAN M, GE S S, REN H Finite time fault tolerant control for robot manipulators using time delay estimation and continuous nonsingular fast terminal sliding mode control[J]. IEEE Transactions on Cybernetics, 2016, 47 (7): 1681- 1693
|
|
|
| [8] |
杨淑英, 占琦, 张兴, 等 基于扩展磁链观测的永磁同步电机转矩闭环矢量控制[J]. 电力系统自动化, 2014, 38 (6): 80- 84
YANG Shu-ying, ZHAN Qi, ZHANG Xing, et al Torque closed-loop vector control based extended flux linkage observer of permanent magnet synchronous motor[J]. Automation of Electric Power System, 2014, 38 (6): 80- 84
doi: 10.7500/AEPS20130622006
|
|
|
| [9] |
XU Z, RAHMAN M F Comparison of a sliding observer and a Kalman filter for direct-torque-controlled IPM synchronous motor drives[J]. IEEE Transactions on Industrial Electronics, 2012, 59 (11): 4179- 4188
doi: 10.1109/TIE.2012.2188252
|
|
|
| [10] |
王永军, 靳添絮, 刘立 基于最小二乘支持向量机的混合动力地下铲运机电机输出转矩预测[J]. 煤炭学报, 2017, 42 (Suppl. 2): 619- 625
WANG Yong-jun, JIN Tian-xu, LIU Li Output torque prediction of hybrid underground LHD motor based on least square support vector machine[J]. Journal of China Coal Society, 2017, 42 (Suppl. 2): 619- 625
|
|
|
| [11] |
AHMADI M A, BAHADORI A Prediction performance of natural gas dehydration units for water removal efficiency using a least-square support vector machine[J]. International Journal of Ambient Energy, 2016, 37 (5): 486- 494
doi: 10.1080/01430750.2015.1004105
|
|
|
| [12] |
XIE W, WANG X, WANG F, et al Finite-control-set model predictive torque control with a deadbeat solution for PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2015, 62 (9): 5402- 5410
doi: 10.1109/TIE.2015.2410767
|
|
|
| [13] |
WU Z, LU K, ZHU Y A practical torque estimation method for interior permanent magnet synchronous machine in electric vehicles[J]. PloS One, 2015, 10 (6): 1- 16
|
|
|
| [14] |
何亚屏, 文宇良, 许峻峰, 等 基于多模式SVPWM算法的永磁同步牵引电机弱磁控制策略[J]. 电工技术学报, 2012, 27 (3): 92- 99
HE Ya-ping, WEN Yu-liang, XU Jun-feng, et al High-power permanent magnet fiux-weakening strategy based on multi-mode SVPWM[J]. Transactions of China Electrotechnical Society, 2012, 27 (3): 92- 99
|
|
|
| [15] |
MIYAJIMA T, FUJIMOTO H, FUJITSUNA M A precise model based design of voltage phase controller for IPMSM[J]. IEEE Transactions on Power Electronics, 2013, 28 (12): 5655- 5664
doi: 10.1109/TPEL.2013.2259262
|
|
|
| [16] |
SANDULESCU P, MEINGUET F, KESTELYN X, et al Control strategies for open-end winding drives operating in the flux-weakening region[J]. IEEE Transactions on Power Electronics, 2013, 29 (9): 4829- 4842
|
|
|
| [17] |
年珩, 胡伟, 周义杰 共直流母线开绕组永磁同步电机的弱磁控制策略[J]. 中国电机工程学报, 2018, 38 (21): 6461- 6469
NIAN Yan, HU Wei, ZHOU Yi-jie Field-weakening control strategy of open-winding permanent magnet synchronous moto with common DC bus[J]. Proceedings of the Chinese Society for Electrical Engineering, 2018, 38 (21): 6461- 6469
|
|
|
| [18] |
盛义发, 喻寿益, 桂卫华, 等 轨道车辆用永磁同步电机系统弱磁控制策略[J]. 中国电机工程学报, 2010, 30 (9): 74- 79
SHENG Yi-fa, YU Shou-yi, GUI Wei-hua, et al Field weakening operation control strategies of permanent magnet synchronous motor for railway vehicles[J]. Proceedings of the Chinese Society for Electrical Engineering, 2010, 30 (9): 74- 79
|
|
|
| [19] |
方晓春, 胡太元, 林飞, 等 基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制[J]. 电工技术学报, 2015, 30 (2): 140- 147
FANG Xiao-chun, HU Tai-yuan, LIN Fei, et al Single current regulator flux-weakening control of PMSM based on current cross-coupling effect[J]. Transactions of China Electrotechnical Society, 2015, 30 (2): 140- 147
doi: 10.3969/j.issn.1000-6753.2015.02.019
|
|
|
| [20] |
陈宁, 张跃, 桂卫华, 等 内埋式永磁同步电机驱动系统的弱磁控制[J]. 控制理论与应用, 2013, 30 (6): 717- 723
CHEN Ning, ZHANG Yue, GUI Wei-hua, et al Flux-weakening control for interior permanent magnet synchronous motor[J]. Control Theory and Application, 2013, 30 (6): 717- 723
|
|
|
| [21] |
赵其进, 廖自力, 张运银, 等 轮毂电机全速度范围无位置传感器控制研究[J]. 兵工学报, 2019, 40 (5): 915- 926
ZHAO Qi-jin, LIAO Zi-li, ZHANG Yun-yin, et al Research on position sensorless control of hub motor in full speed range[J]. Acta Armamentarii, 2019, 40 (5): 915- 926
doi: 10.3969/j.issn.1000-1093.2019.05.003
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|