| Mechanical Engineering |
|


|
|
|
| Drill pipe fault diagnosis method based on one-dimensional convolutional neural network |
Lie-jun JIN1( ),Jian-ming ZHAN1,2,*(),Jun-hua CHEN1,2,Tao WANG2 ),Jian-ming ZHAN1,2,*(),Jun-hua CHEN1,2,Tao WANG2 |
1. Institute of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China
2. School of Mechanical and Energy Engineering, Ningbo Institute of Technology, Zhejiang University, Ningbo 315100, China |
|
|
|
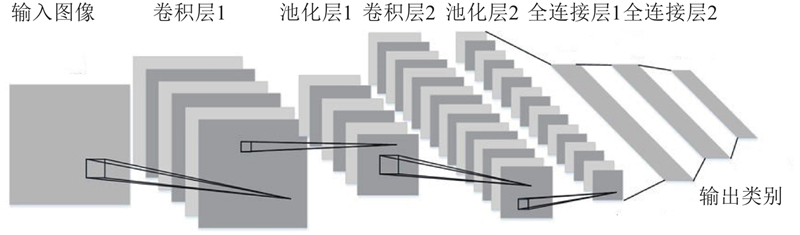
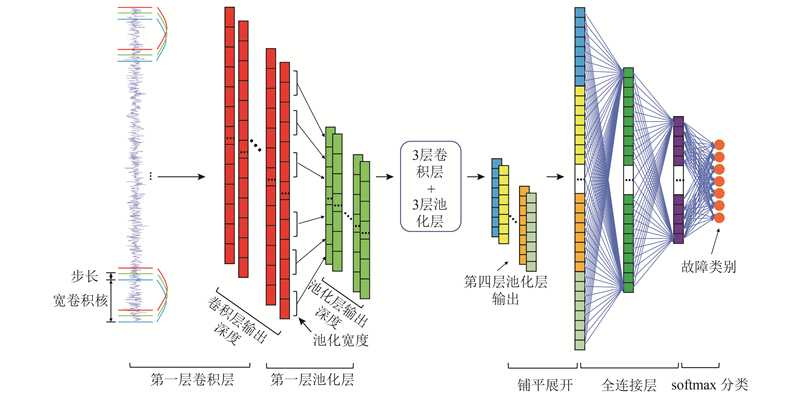
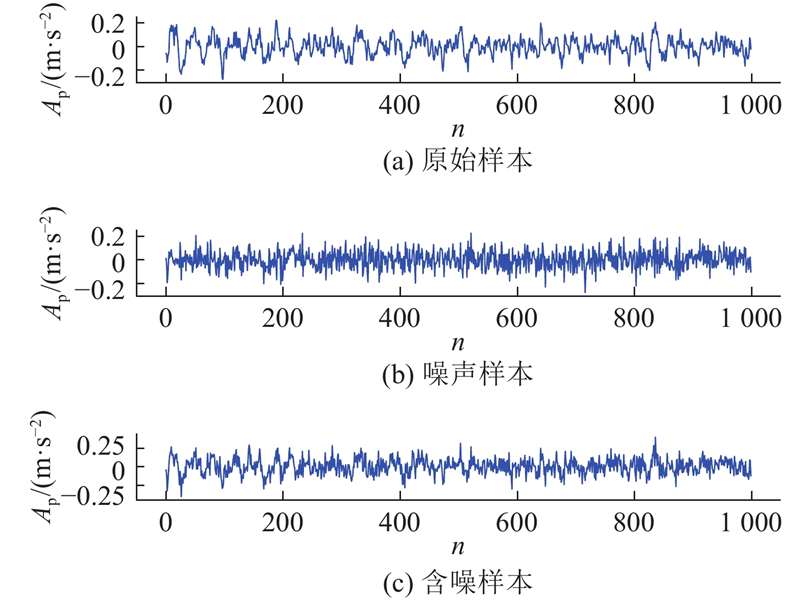
Abstract A drill pipe fault diagnosis model based on one-dimensional convolutional neural network was proposed in order to diagnose the fault type of drill pipe failure early; the structure as well as the parameter of the model were designed and analyzed in detail. Referring to the existing convolutional neural network model, the layer number of the convolutional layer as well as the pooling layer of the model, the size of the convolution kernel and the sliding step length were designed combining with the working characteristics of the drill pipe and the principle of the receptive field. The model eliminates the process of extracting fault signal features and has higher diagnostic accuracy than previous drill stem fault diagnosis. Meanwhile, the model has strong adaptability and anti-noise ability under different speed conditions and different soil conditions.
|
|
Received: 25 February 2019
Published: 05 March 2020
|
|
|
|
Corresponding Authors:
Jian-ming ZHAN
E-mail: 21725203@zju.edu.cn;zhanjm@nit.zju.edu.cn
|
基于一维卷积神经网络的钻杆故障诊断
为了在钻杆故障早期诊断出钻杆的故障类型,提出一种基于一维卷积神经网络的钻杆故障诊断模型,对模型的结构和参数进行详细地设计与分析. 参考现有的卷积神经网络模型,结合钻杆的工作特性以及感受野的原理,设计模型的卷积层和池化层的层数、卷积核的大小以及滑动步长. 该模型省去了对故障信号特征提取的过程,比先前的钻杆故障诊断有更高的诊断准确率. 该模型在不同转速工况下和不同土质工况下均具有较强的适应性和抗噪能力.
关键词:
钻杆故障诊断,
一维卷积神经网络,
感受野,
适应性,
抗噪能力
|
|
| [1] |
张震. 旋挖钻机钻杆失效研究[D]. 西安: 长安大学, 2011.
ZHANG Zhen. Failure of the drill pipe rotary drilling rig [D]. Xi’an: Chang’an University, 2011.
|
|
|
| [2] |
YU X, DONG F, DING E, et al Rolling bearing fault diagnosis using modified LFDA and EMD with sensitive feature selection[J]. IEEE Access, 2018, 6: 3715- 3730
doi: 10.1109/ACCESS.2017.2773460
|
|
|
| [3] |
RAFIEE J, RAFIEE M A, TSE P W Application of mother wavelet functions for automatic gear and bearing fault diagnosis[J]. Expert Systems with Applications, 2010, 37 (6): 4568- 4579
doi: 10.1016/j.eswa.2009.12.051
|
|
|
| [4] |
SINGH D S, ZHAO Q Pseudo-fault signal assisted EMD for fault detection and isolation in rotating machines[J]. Mechanical Systems and Signal Processing, 2016, 81: 202- 218
doi: 10.1016/j.ymssp.2016.03.007
|
|
|
| [5] |
LI H, ZHANG Y. Bearing faults diagnosis based on EMD and Wigner-Ville distribution [C] // World Congress on Intelligent Control and Automation. Dalian: IEEE, 2006: 5447-5451.
|
|
|
| [6] |
GAN M, WANG C, ZHU C Multiple-domain manifold for feature extraction in machinery fault diagnosis[J]. Measurement, 2015, 75: 76- 91
doi: 10.1016/j.measurement.2015.07.042
|
|
|
| [7] |
唐赛, 何荇兮, 张家悦, 等 基于长短期记忆网络的轴承故障识别[J]. 汽车工程学报, 2018, 8 (4): 297- 303
TANG Sai, HE Xing-xi, ZHANG Jia-yue, et al Bearing fault identification based on long short-term memory networks[J]. Chinese Journal of Automotive Engineering, 2018, 8 (4): 297- 303
doi: 10.3969/j.issn.2095-1469.2018.04.09
|
|
|
| [8] |
HINCHI A Z, TKIOUAT M Rolling element bearing remaining useful life estimation based on a convolutional long-short-term memory network[J]. Procedia Computer Science, 2018, 127: 123- 132
doi: 10.1016/j.procs.2018.01.106
|
|
|
| [9] |
ZHAO R, YAN R, WANG J, et al Learning to monitor machine health with convolutional bi-directional LSTM networks[J]. Sensors, 2017, 17 (2): 273
doi: 10.3390/s17020273
|
|
|
| [10] |
杜振. 基于EMD原理与BP神经网络的旋挖钻机钻杆故障识别方法[D]. 杭州: 浙江大学, 2018.
DU Zhen. Drill pipe fault identification method of rotaty drilling rig based on EMD principle and BP neural network [D]. Hangzhou: Zhejiang University, 2018.
|
|
|
| [11] |
张少奇. 基于小波变换与SVM的钻杆故障诊断[D]. 杭州: 浙江大学, 2018.
ZHANG Shao-qi. Drill pipe fault diagnosis based on wavelet transform and SVM [D]. Hangzhou: Zhejiang University, 2018.
|
|
|
| [12] |
LE C Y, BOSER B E, DENKER J S, et al Handwritten digit recognition with a back-propagation network[J]. Advances in neural information processing systems, 1990, 396- 404
|
|
|
| [13] |
HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition [C] // Proceedings of the IEEE conference on computer vision and pattern recognition. Las Vegas: IEEE, 2016: 770-778.
|
|
|
| [14] |
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C] // Proceedings of the IEEE conference on computer vision and pattern recognition. Columbus: IEEE, 2014: 580-587.
|
|
|
| [15] |
GOODFELLOW I, POUGET-ABADIE J, MIRZA M, et al. Generative adversarial nets [C] // Advances in Neural Information Processing Systems. Montreal: [s. n.] 2014: 2672-2680.
|
|
|
| [16] |
KRIZHEVSKY A, SUTSKEYER I, HINTON G E. Imagenet classification with deep convolutional neural networks [C] // Advances in neural information processing systems. Lake Tahoe: IEEE, 2012: 1097-1105.
|
|
|
| [17] |
BOUVRIE J. Notes on convolutional neural networks[R/OL]. Massachusetts Institute of Technology. (2016-09-15)[2018-04-20]. http://cogprints.org/5869/1/cnn_tutorial.pdf.
|
|
|
| [18] |
LECUN Y, BOTTOU L, BENGIO Y, et al Gradient-based learning applied to document recognition[J]. Proceedings of the IEEE, 1998, 86 (11): 2278- 2324
doi: 10.1109/5.726791
|
|
|
| [19] |
HUBEL D H, WIESEL T N Receptive fields, binocular interaction and functional architecture in the cat's visual cortex[J]. The Journal of physiology, 1962, 160 (1): 106- 154
doi: 10.1113/jphysiol.1962.sp006837
|
|
|
| [20] |
SIMONYAN K, ZISSERMAN A. very deep convolutional networks for large-scale image recognition [C] // Computer Vision and Pattern Recognition. Columbus: CVPR, 2014: 1409-1556.
|
|
|
| [21] |
SHEIKH N, KEFATO Z T, MONTRESOR A. Semi-Supervised heterogeneous information network embedding for node classification using 1D-CNN [C] // 2018 Fifth International Conference on Social Networks Analysis, Management and Security (SNAMS). Valencia: IEEE, 2018: 177-181.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|