| Mechanical and Energy Engineering |
|


|
|
|
| Investigation on general stiffness of automatic horizontal dual-machine cooperative drilling and riveting system |
Jun-xia JIANG( ),Chen DONG,Chen BIAN,Hui-yue DONG ),Chen DONG,Chen BIAN,Hui-yue DONG |
| School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China |
|
|
|
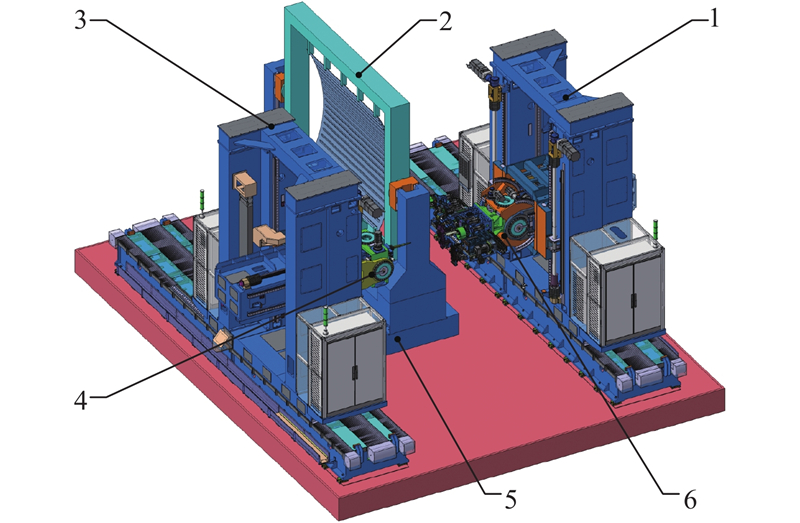
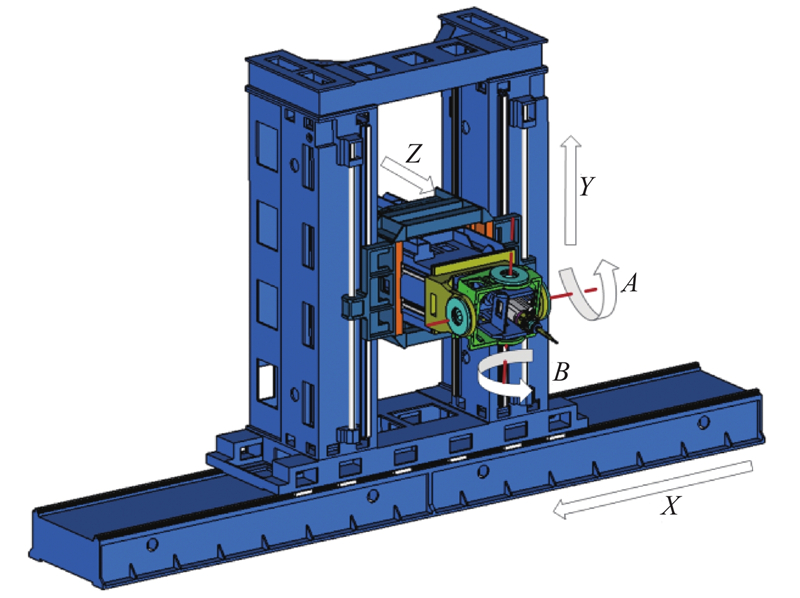
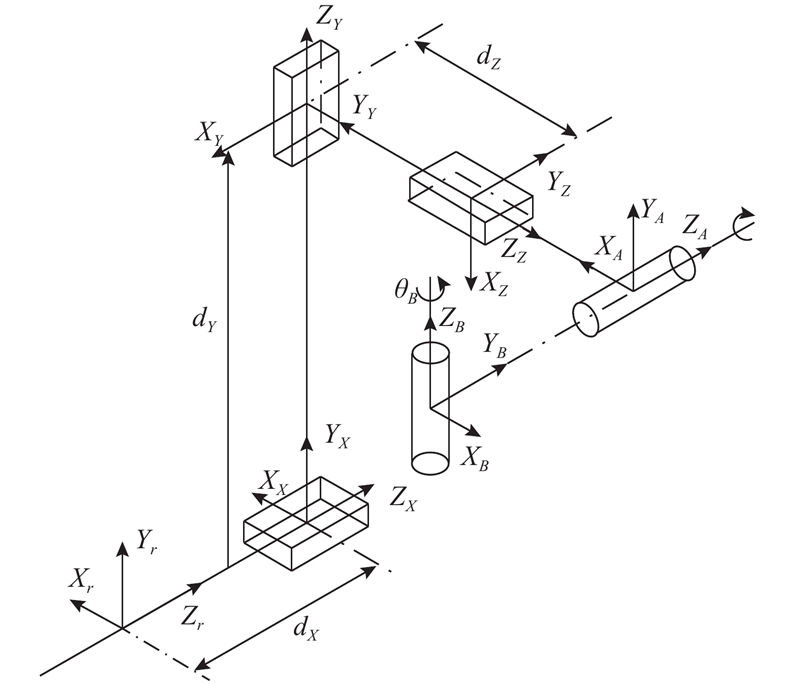
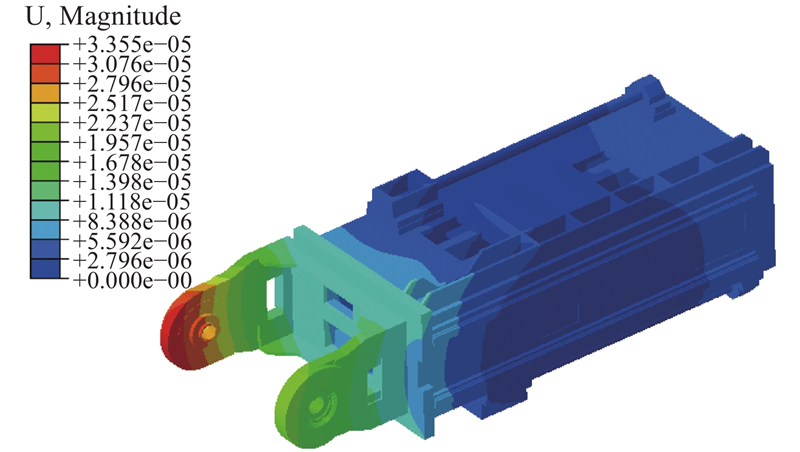
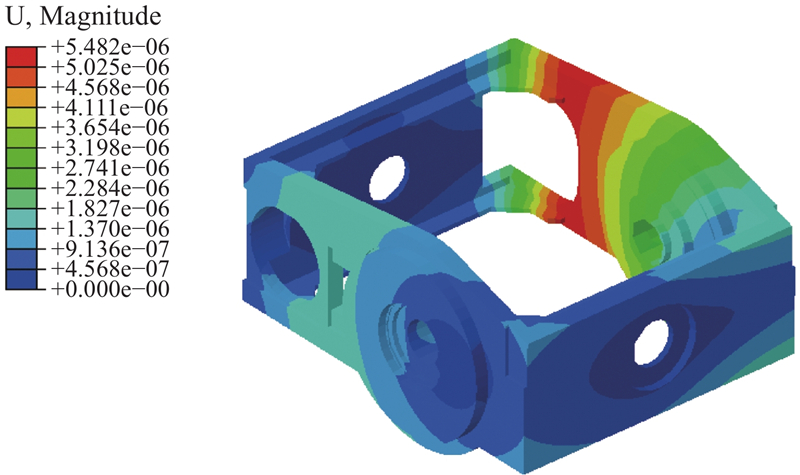
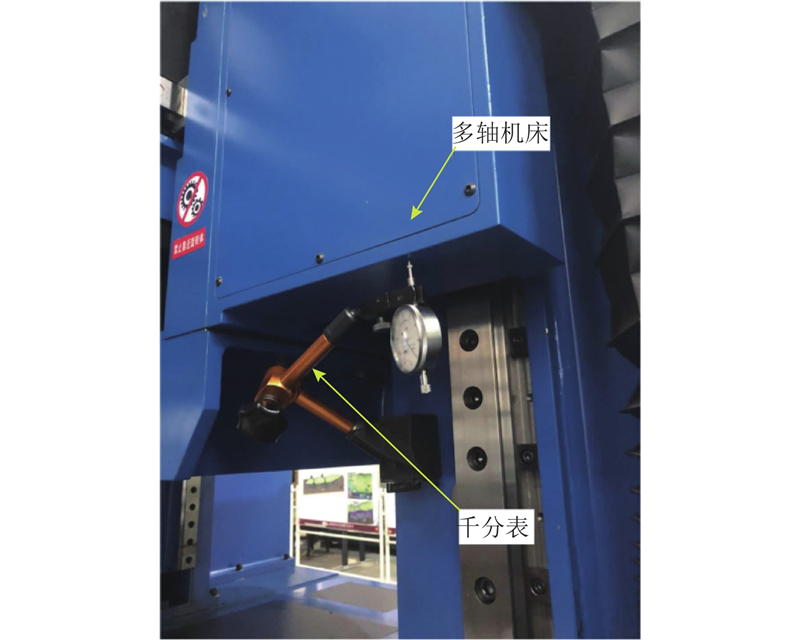
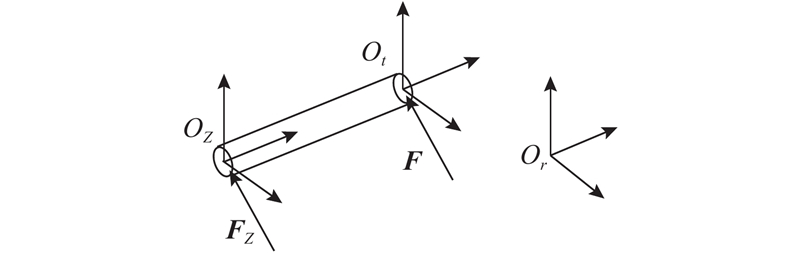
Abstract The quantitative analysis of the end elastic deformation was realized in order to analyze the distribution of stiffness performance of the multi-axis machine tool in automatic horizontal dual-machine cooperative drilling and riveting system. The kinematic model of the multi-axis machine tool was established. Machine joints, end effector and flexible links were determined to be the main sources of the end deformation in the multi-axis machine tool. Stiffness matrixes of flexible links and end effector in their respective coordinate systems were obtained by the finite element method based on their mechanical properties. The stiffness matrix of machine joints in the joint space was obtained by the test method. The enhanced end stiffness matrix of machine joints was established by the Jacobian matrix method, and the end stiffness matrixes of flexible links were established by the point transformation method. Based on the small elastic deformation theory, the end stiffness matrixes of all end deformation sources were integrated to establish the general end stiffness model of the multi-axis machine tool. Through the actual test, the error between the general end stiffness model and the experimental results was less than 10%, which proves the accuracy of the general stiffness model.
|
|
Received: 26 October 2018
Published: 22 May 2019
|
|
|
卧式双机联合自动钻铆系统综合刚度研究
为分析卧式双机联合自动钻铆系统中多轴机床的刚度特性分布规律,定量分析该机床末端弹性变形. 建立多轴机床的运动学模型,确定运动关节、柔性运动轴和末端执行器为其末端变形主要来源;针对柔性运动轴与末端执行器的力学特性,采用有限元法得到其对应坐标系内的刚度矩阵;针对运动关节,采用试验法得到关节空间内的刚度矩阵;通过雅克比矩阵法建立运动关节的增强型末端刚度矩阵,通过点传递法建立柔性运动轴的末端刚度矩阵;基于弹性小变形理论,综合各个变形来源的末端刚度矩阵建立多轴机床的综合末端刚度模型;通过实际测试,该刚度模型与实验结果误差小于10%,证明了该综合刚度模型的准确性.
关键词:
自动钻铆,
多轴机床,
综合刚度,
雅克比矩阵,
弹性小变形理论
|
|
| [1] |
杜兆才, 姚艳彬, 王健 机器人钻铆系统研究现状及发展趋势[J]. 航空制造技术, 2015, (4): 26- 31
DU Zhao-cai, YAO Yan-bin, WANG Jian Research status and development trends of robot drilling and riveting system[J]. Aeronautical Manufacturing Technology, 2015, (4): 26- 31
|
|
|
| [2] |
卜泳, 许国康, 肖庆东 飞机结构件的自动化精密制孔技术[J]. 航空制造技术, 2009, (24): 61- 64
BU Yong, XU Guo-kang, XIAO Qing-dong Automatic precision drilling technology of aircraft structural part[J]. Aeronautical Manufacturing Technology, 2009, (24): 61- 64
doi: 10.3969/j.issn.1671-833X.2009.24.011
|
|
|
| [3] |
张辉 飞机装配设备及供应商一览[J]. 航空制造技术, 2008, (11): 71- 73
ZHANG Hui Introduction of aircraft assembly equipment and suppliers[J]. Aeronautical Manufacturing Technology, 2008, (11): 71- 73
doi: 10.3969/j.issn.1671-833X.2008.11.014
|
|
|
| [4] |
LUM N, LUO Q E7000 ARJ-manual flexible tooling for horizontal riveting system[J]. SAE International Journal of Aerospace, 2014, 7 (2): 241- 245
doi: 10.4271/2014-01-2250
|
|
|
| [5] |
王珉, 陈文亮, 郝鹏飞, 等 飞机数字化自动钻铆系统及其关键技术[J]. 航空制造技术, 2013, (Z1): 80- 83
WANG Min, CHEN Wen-liang, HAO Peng-fei, et al Lightweight automatic drilling system and key technology for aircraft[J]. Aeronautical Manufacturing Technology, 2013, (Z1): 80- 83
|
|
|
| [6] |
喻龙, 章易镰, 王宇晗, 等 飞机自动钻铆技术研究现状及其关键技术[J]. 航空制造技术, 2017, (9): 16- 25
YU Long. ZHANG Yi-lian, WANG Yu-han, et al. Research status of aircraft automatic drilling and riveting system and its key technology[J]. Aeronautical Manufacturing Technology, 2017, (9): 16- 25
|
|
|
| [7] |
赵辉. 基于UMAC的自动钻铆机控制系统研究与开发[D]. 南京: 南京航空航天大学, 2014: 3–13.
ZHAO Hui. Research automatic control system of drilling and riveting machine based on UMAC[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014: 3–13.
|
|
|
| [8] |
KIM B H, YI B J, OH S R, et al Non-dimensionalized performance indices based optimal grasping for multi-fingered hands[J]. Mechatronics, 2004, 14: 255- 280
doi: 10.1016/S0957-4158(03)00039-4
|
|
|
| [9] |
SALGADO M A, LACALLE L N L D, LAMIKIZ A, et al Evaluation of the stiffness chain on the deflection of end-mills under cutting forces[J]. International Journal of Machine Tools and Manufacture, 2005, 45 (6): 727- 739
|
|
|
| [10] |
闫蓉, 陈威, 彭芳瑜, 等 多轴加工系统闭链刚度场建模与刚度性能分析[J]. 机械工程学报, 2012, 48 (1): 177- 184
YAN Rong, CHEN Wei, PENG Fang-yu, et al Closed-loop stiffness modeling and stiffness index analysis for multi-axis machining system[J]. Journal of Mechanical Engineering, 2012, 48 (1): 177- 184
|
|
|
| [11] |
GAO X, LI B, HONG J, et al Stiffness modeling of ma-chine tools based on machining space analysis[J]. The International Journal of Advanced Manufacturing Technology, 2016, 86 (5-8): 1- 14
|
|
|
| [12] |
吴石, 李荣义, 刘献礼, 等 复杂曲面模具加工系统综合刚度场建模与分析[J]. 机械工程学报, 2016, 52 (23): 189- 198
WU Shi, LI Rong-yi, LIU Xian-li, et al The Modeling and analysis about comprehensive stiffness field of complex curved surface mould processing system[J]. Journal of Mechanical Engineering, 2016, 52 (23): 189- 198
|
|
|
| [13] |
张启祥. 飞机壁板自动钻铆机送钉系统技术研究[D]. 杭州: 浙江大学, 2018: 7–13.
ZHANG Qi-xiang. Research of the rivet feeding system technology of aircraft panel drilling and riveting ma-chine[D]. Hangzhou: Zhejiang University, 2018: 7–13.
|
|
|
| [14] |
吴少帅. 飞机壁板自动钻铆过程变形分析[D]. 杭州: 浙江大学, 2017: 53–59.
WU Shao-shuai. Research on deformation analysis of automatic drilling and riveting technology of aircraft sheet [D]. Hangzhou: Zhejiang University, 2017: 53–59.
|
|
|
| [15] |
蔡自兴. 机器人学[M]. 北京: 清华大学出版社, 2000: 38-105.
|
|
|
| [16] |
熊有伦, 丁汉, 刘恩沧, 等. 机器人学[M]. 北京: 机械工业出版社. 1993: 54–81.
|
|
|
| [17] |
ALICI G, SHIRINAZDEH B Enhanced stiffness modeling, identification and characterization for robot manipulators[J]. IEEE Transactions on Robotics, 2005, 21 (4): 554- 564
doi: 10.1109/TRO.2004.842347
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|