| 航空航天技术 |
|


|
|
|
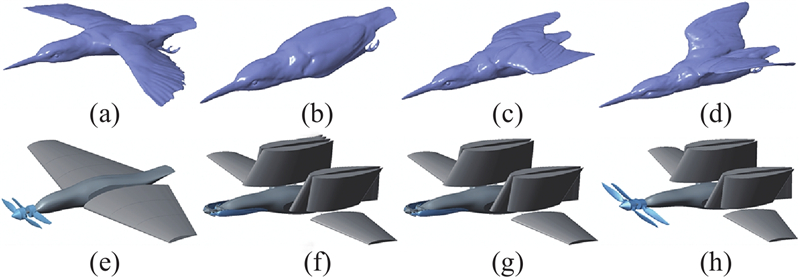
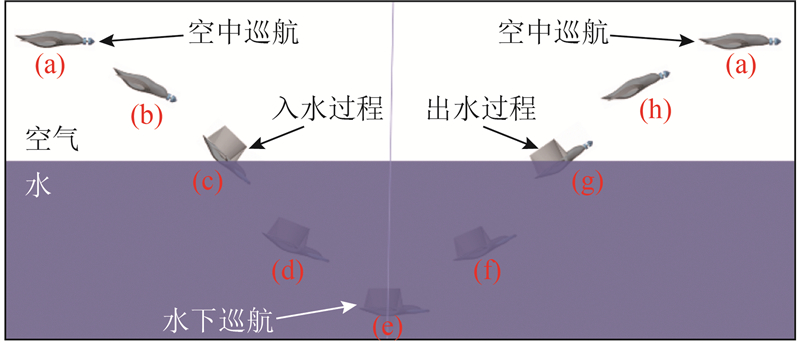
| 仿翠鸟水空跨介质航行器设计与入水分析 |
云忠1( ),温猛1(),罗自荣2,陈龙1 ),温猛1(),罗自荣2,陈龙1 |
1. 中南大学 机电工程学院,湖南 长沙 410083
2. 国防科技大学 智能科学学院,湖南 长沙 410008 |
|
| Design and plunge-diving analysis of underwater-aerial transmedia vehicle of bionic kingfisher |
| Zhong YUN1(),Meng WEN1(),Zi-rong LUO2,Long CHEN1 |
1. College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China
2. School of Intelligent Science, National University of Defense Technology, Changsha 410008, China |
引用本文:
云忠,温猛,罗自荣,陈龙. 仿翠鸟水空跨介质航行器设计与入水分析[J]. 浙江大学学报(工学版), 2020, 54(2): 407-415.
Zhong YUN,Meng WEN,Zi-rong LUO,Long CHEN. Design and plunge-diving analysis of underwater-aerial transmedia vehicle of bionic kingfisher. Journal of ZheJiang University (Engineering Science), 2020, 54(2): 407-415.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2020.02.023
或
http://www.zjujournals.com/eng/CN/Y2020/V54/I2/407
|
| 1 |
何肇雄, 郑震山, 马东立, 等 国外跨介质飞行器发展历程及启示[J]. 舰船科学技术, 2016, 38 (5): 152- 157
HE Zhao-xiong, ZHENG Zhen-shan, MA Dong-li, et al Development of foreign trans-media aircraft and its enlightenment to China[J]. Ship Science and Technology, 2016, 38 (5): 152- 157
doi: 10.3404/j.issn.1672-7619.2016.05.032
|
| 2 |
杨兴帮, 梁建宏, 文力, 等 水空两栖跨介质无人飞行器研究现状[J]. 机器人, 2018, 40 (1): 102- 114
YANY Xing-bang, LIANG Jian-hong, WEN Li, et al Research status of water-air amphibious trans-media unmanned vehicle[J]. Robot, 2018, 40 (1): 102- 114
|
| 3 |
钟宏伟 国外无人水下航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25 (3): 215- 225
ZHONG Hong-wei Review and prospect of equipment and techniques for unmanned undersea vehicle in foreign countries[J]. Journal of Unmanned Undersea Systems, 2017, 25 (3): 215- 225
|
| 4 |
潘光, 宋保维, 黄桥高, 等 水下无人系统发展现状及其关键技术[J]. 水下无人系统学报, 2017, 25 (1): 44- 51
PAN Guang, SONG Bao-wei, HUANG Qiao-gao, et al Development and key techniques of unmanned undersea system[J]. Journal of Unmanned Undersea Systems, 2017, 25 (1): 44- 51
|
| 5 |
ZIMMERMAN S, ABDELKEFI A Review of marine animals and bioinspired robotic vehicles: classifications and characteristics[J]. Progress in Aerospace Sciences, 2017, 93: 95- 119
doi: 10.1016/j.paerosci.2017.07.005
|
| 6 |
姜琬, 贾重任, 卢芳春.仿生系列跨介质新概念飞行器气水动布局设计[C]//中国航空学会青年科技论坛.沈阳: 中国学术期刊电子出版社, 2014: 54-60.
JIANG WAN, JIA Zhong-ren, LU Fang-chun. Aerodynamic and hydrodynamic configuration design of bionic series transmedia new concept aircraft [C]// China Aviation Society Youth Science and Technology Forum. Shenyang: China Academic Journal Electronic Publishing House, 2014: 54-60.
|
| 7 |
GAO A, TECHET A H. Design considerations for a robotic flying fish [C]// Oceans. Waikoloa: IEEE, 2011: 1-8.
|
| 8 |
LOCK R J, VAIDYANATHAN R, BURGESS S C, et al Development of a biologically inspired multi-modal wing model for aerial-aquatic robotic vehicles through empirical and numerical modelling of the common guillemot, Uria aalge[J]. Bioinspiration and Biomimetics, 2010, 5 (4): 1- 15
|
| 9 |
LOCK R J, PEIRIS B H P M, BATES S, et al. Quantification of the benefits of a compliant foil for underwater flapping wing propulsion [C]// ASME International Conference on Advanced Intelligent Mechatronics. Budapest: IEEE, 2011: 898-903.
|
| 10 |
RICHARD J. A biologically-inspired multi-modal wing for aerial-aquatic robotic vehicles [D]. Bristol: University of Bristol, 2011.
|
| 11 |
LOCK R J, VAIDYANATHAN R, BURGESS S C. Design and experimental verification of a biologically inspired multi-modal wing for aerial-aquatic robotic vehicles [C]// The 4th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics. Rome: IEEE, 2012: 681-687.
|
| 12 |
LOCK R J, VAIDYANATHAN R, BURGESS S C Impact of marine locomotion constraints on a bio-inspired aerial-aquatic wing: experimental performance verification[J]. Journal of Mechanisms and Robotics, 2014, 6 (1): 1- 10
|
| 13 |
SIDDALL R, ANCEL A O, KOVA? M Wind and water tunnel testing of a morphing aquatic micro air vehicle[J]. Interface Focus, 2017, 7 (1): 20160085
doi: 10.1098/rsfs.2016.0085
|
| 14 |
YANG X, LIANG J, WANG T, et al. Computational simulation of a submersible unmanned aerial vehicle impacting with water [C]// IEEE International Conference on Robotics and Biomimetics. Shenzhen: IEEE, 2013: 1138-1143.
|
| 15 |
WANG T M, YANG X B, LIANG J H, et al CFD based investigation on the impact acceleration when a gannet impacts with water during plunge diving[J]. Bioinspiration and Biomimetics, 2013, 8 (3): 036006
doi: 10.1088/1748-3182/8/3/036006
|
| 16 |
YANG X, WANG T, LIANG J, et al. Numerical analysis of biomimetic gannet impacting with water during plunge-diving [C]// IEEE International Conference on Robotics and Biomimetics. Guangzhou: IEEE, 2012: 569-574.
|
| 17 |
YAO G, LIANG J, WANG T, et al. Submersible unmanned flying boat: design and experiment [C]// IEEE International Conference on Robotics and Biomimetics. Bali: IEEE, 2014: 1308-1313.
|
| 18 |
LIANG J, YANG X, WANG T, et al Design and experiment of a bionic gannet for plunge-diving[J]. Journal of Bionic Engineering, 2013, 10 (3): 282- 291
doi: 10.1016/S1672-6529(13)60224-3
|
| 19 |
LIANG J H, YAO G C, WANG T M, et al Wing load investigation of the plunge-diving locomotion of a gannet morus inspired submersible aircraft[J]. Science China: Technological Sciences, 2014, 57 (2): 390- 402
doi: 10.1007/s11431-013-5437-5
|
| 20 |
YANG X, WANG T, LIANG J, et al. Submersible unmanned aerial vehicle concept design study [C]// the Aviation Technology, Integration, and Operations Conference. Los Angeles: American Institute of Aeronautics and Astronautics, 2013: 4422.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|