

生活在水域沿岸的生物如翠鸟可以从空中俯冲入水中捕鱼,随后利用翅膀拍打返回空中. 这种捕食方式可以快速跨越水空介质,具有较大的参考价值,因而引起研究人员的广泛关注[2].
目前国内外已有学者对水域沿岸生物的跨介行为进行研究,并据此设计水空跨介航行器. 姜琬等[6]提出仿旗鱼倾转旋翼两栖飞行器和仿飞鱼可旋转组合机翼飞行器的布局概念,前者利用倾转旋翼实现飞行器的垂直出入水,后者利用可折叠空用螺旋桨实现空中推进,2种方案均通过水用螺旋桨实现水下推进. Gao等[7]仿生飞鱼设计可实现水空两栖作业的机器鱼,并对机构设计、驱动方式和控制方式等进行系统研究,为相关仿生器的研究提供了一定的理论基础. Lock等[8-12]仿海鸥设计可用于水下推进的扑翼式航行器,并验证了扑翼式方案的可行性. Siddall等[13]仿鲣鸟设计了2种采用溅落入水和喷水出水的两栖无人飞行器,并验证了该入水方式的可行性. Yang等[14-16]仿鲣鸟设计采用气囊辅助调控装置姿态的水空跨介飞行器,并通过仿真和试验分析航行器入水冲击力的影响因素及其对装置结构强度的要求. Yao等[17]借鉴飞鱼和鸟类的特点设计水空两栖跨介质航行器,分别采用折叠螺旋桨和水泵实现在空中和水下的推进. Liang等[18-20]在分析塘鹅体型、骨架和入水时翅膀姿态的基础上,设计可以跳水和垂直出水的仿生跨介航行器,并通过实验分析其入水冲击力的影响因素. Stewart等[21]仿海鸦提出分别采用四旋翼/固定翼混合驱动、立式垂直起降驱动和喷水辅助驱动的3种概念水空跨介两栖无人机,并仿真比较3种驱动方式的优缺点,为水空跨介两栖无人机驱动方式的设计提供了更多的选择.
目前虽然有不少关于水空跨介航行器的设计方案,但大多仅停留在概念设计阶段,并且存在推进系统体积占比大、水空动力系统切换复杂的问题. 本研究仿翠鸟捕鱼方式设计由单一动力源驱动的水空跨介航行器,可以根据工况实现空中和水下动力系统的快速切换,在精简航行器动力系统的同时能满足其水下和空中推进的需求,为水空跨介质航行器动力系统的设计提供了新的可选方案;此外,本研究对入水高度、入水角度和航行器密度等关键因素对航行器入水过程的影响进行仿真分析,为航行器跨介时运动参数的设置提供了一定的理论基础.
1. 仿生跨介质航行器的概念设计
1.1. 气动布局
翠鸟是擅长捕鱼的生活在水域沿岸的鸟类,其细长的尖嘴和流线型的身体外形使其能够以较小的阻力高速冲入水中捕捉鱼类. 翠鸟在捕鱼时,收拢翅膀俯冲入水,依靠翅膀调节身体姿态捕鱼,最后拍打翅膀离开水面.
图 1
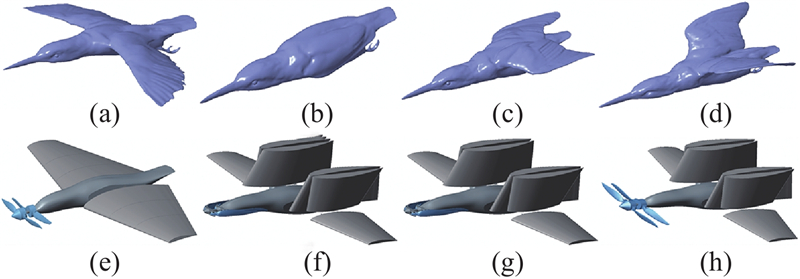
图 1 航行器与翠鸟气动布局的对应关系
Fig.1 Correspondence of aerodynamic layout between aircraft and kingfisher
1.2. 工作模式
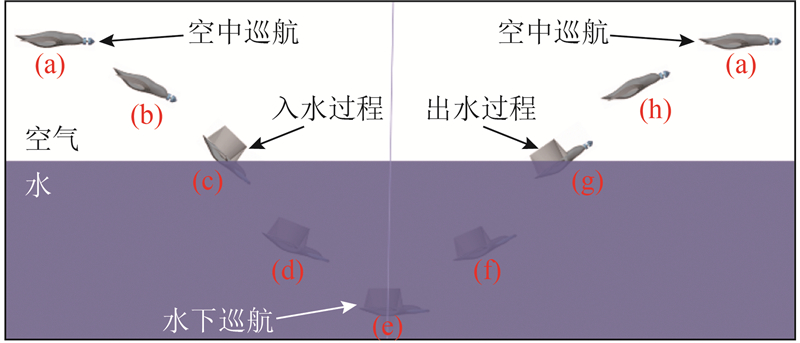
仿翠鸟捕鱼过程进行航行器设计,航行器在空中飞行时采用前端空用可折叠共轴双桨提供拉力,在水下航行时采用后端喷水推进泵提供推力,并且可以根据工作环境进行水下和空中动力系统的切换.
航行器工作过程如图2所示. 如图2(a)所示为空中航行过程,折叠机翼处于展开状态,前端空用折叠螺旋桨转动提供动力;如图2(b)所示为从空中到水下的准备过程,机翼和空用螺旋桨开始折叠,航行器向水面俯冲;如图2(c)所示为入水过程,机翼和空用螺旋桨折叠完成,航行器以一定角度冲入水中,并依靠机翼外翼调节航行器姿态;如图2(d) 所示为水下姿态调整过程,后端喷水推进泵开始工作,机翼外翼转动逐渐调整航行器姿态至巡航姿态;如图2(e) 所示为水下航行过程,机翼和前端空用螺旋桨为折叠状态,后端喷水推进泵工作以提供动力,并依靠机翼外翼调节航行器姿态;如图2(f) 所示为从水下到空中的准备过程,机翼外翼转动以调整航行器姿态,使航行器冲向水面;如图2(g) 所示为出水过程,后端喷水推进泵停止工作,前端空用折叠螺旋桨开始工作,逐渐将航行器拉出水面;如图2(h) 所示为空中姿态调整过程,机翼展开以提供航行器空中飞行所需升力,并通过机翼外翼逐渐调整航行器姿态至平飞状态.
图 2
2. 仿生跨介质航行器的结构设计
2.1. 推进系统
在根据设计要求对翠鸟模型进行比例放大,并综合考虑能量消耗、工作时长和工作载荷等因素后,确定航行器的设计参数如表1所示.
表 1 仿生跨介质航行器设计参数
Tab.1
| 参数 | 数值 | 参数 | 数值 | |
| 质量 | 2.03 kg | 密度 | 0.35 g/cm3 | |
| 体长 | 600 mm | 翼展 | 1 055 mm | |
| 空中飞行最大速度 | 18 m/s | 水下航行最大速度 | 0.5 m/s | |
| 空中最大飞行时长 | 10 min | 水下最大航行时长 | 10 min | |
| 最大起飞时长 | 30 s | 最大降落时长 | 10 s |
为了满足水空跨介质航行器的需求,本研究采用前端空用可折叠共轴双桨机构进行空中推进,后端喷水推进泵进行水下推进,并采用动力切换模块进行水空动力的切换. 航行器推进系统的主体结构如图3所示.
图 3
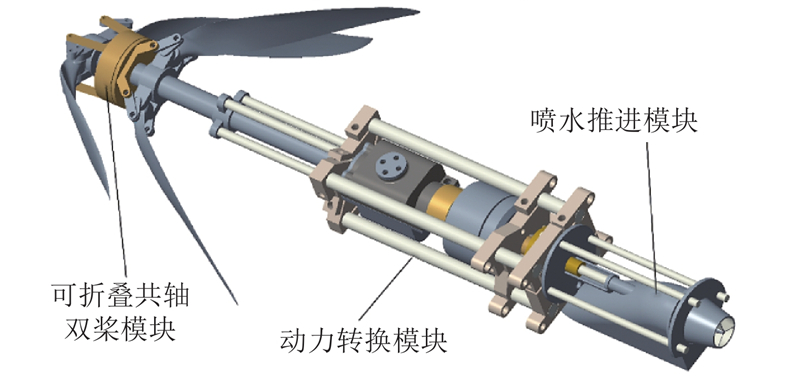
动力转换模块结构可以通过电机的正反转控制2个单向离合器的通断,从而分别实现向空用可折叠共轴双桨和水用喷水推进泵的传动,最终实现空中和水下动力系统的切换;在模块内使用锥齿轮系将从电机传来的单向转动转换为共轴双桨机构的正反向转动.
为了进行空中推进机构的设计,对比分析常见的单旋翼、多轴多旋翼和共轴双旋翼等结构方案. 单旋翼方案传动系统简单、维修方便,但无法实现螺旋桨扭矩的平衡,且在相同桨盘面下能提供的最大拉力较小;多轴多旋翼方案能够提供较大拉力并实现悬停,但其总体的桨盘面积较大,在航行器水下运动时会产生较大的阻力;共轴双旋翼方案能够提供较大的拉力,实现扭矩的平衡,而可折叠形式的使用可在保证上述优势的同时大幅度减小航行器水下运动时所受到的阻力. 综合考虑拉力、扭矩、阻力等因素,认为可折叠共轴双旋翼方案为较优的选择. 可折叠空用共轴双桨结构如图4所示. 在主电机正向转动时接通,用于在空中为航行器提供动力. 正、反向折叠桨分别接受动力转换模块传来的正、反转运动,而联动旋转机构使得正、反折叠桨同步折叠,避免可能的叶片碰撞. 可折叠共轴双桨机构的采用抵消了单桨结构的扭矩,增大了螺旋桨总体的拉力,减小了水下的阻力. 螺旋桨叶片和电机根据功率匹配分别选择APC 11×8F和飓风U3515 kv740.
图 4

为了进行水下推进机构的设计,对比分析常见的水用螺旋桨、导管螺旋桨和喷水推进泵等机构方案. 传统水用螺旋桨结构简单,在各类船舶中应用广泛,但容易因航行器的跨介过程中较大的冲击力而产生故障;导管螺旋桨相对普通水用螺旋桨效率更高,但同样会在航行器跨介时受到较大的冲击力;喷水推进泵在相同直径时有更高的载荷承受能力、较强的抗空化性能和较低的噪声,其内部流道有利于航行器跨介时推进器推力的稳定输出. 此外,喷水推进泵可以安装在机身内部以减小跨介航行器在工作过程中的阻力. 综合考虑推力、阻力和使用场合等因素,认为喷水推进泵是较优的选择. 喷水推进模块与喷水推进泵结构相似,在主电机反向转动时接通,能够提供比普通水下螺旋桨更大的推力,用于航行器在水下的推进.
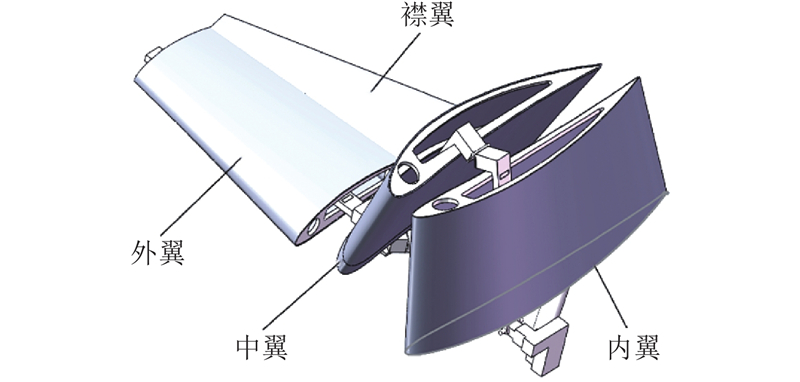
折叠机翼结构如图5所示,在空中时为展开状态,在水下及出入水过程中为折叠状态以减小阻力,可以通过襟翼的摆动调整航行器的姿态和水下航行深度. 与后掠翼相比,该结构阻力稍大,但在水下运动时两侧外翼和折叠后的内翼、中翼对称分布使航行器整体有更好的稳定性. 机翼的翼型为NACA6412.
图 5
2.2. 功率计算
设航行器的功率
式中:
根据文献[20]可知,航行器推进系统的推力为
式中:k为附加质量系数,k>1;α为航行器轴线与前进方向的夹角;mg为航行器的重力;Da、Dw分别为航行器在空中和水下所受到的阻力. 航行器的推进功率表达式为
最终可以得到航行器的功率:
3. 仿生跨介质航行器的入水分析
3.1. 入水过程的运动学分析
跨介质航行器在入水瞬间的受力情况较复杂,为了简化问题,本研究只分析垂直于水面方向的受力情况. 在入水过程中航行器垂直方向的受力示意图如图6所示. 图中,
图 6
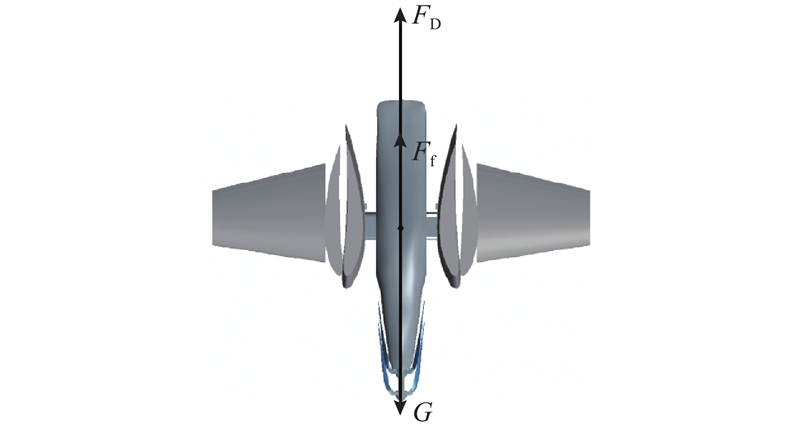
根据对航行器入水时的受力分析,可以得到如下平衡方程:
式中:m为航行器质量,a为入水过程中的冲击加速度. 可以得到航行器的a、航速v、位移S表达式分别为
航行器跨介入水过程涉及到水和空气2种介质,但空气所产生的浮力相对水而言几乎可以忽略,则浮力表达式为
式中:
冲击加速度表达式为
式中:
式中:
由式(9)可以看出,跨介航行器的入水冲击加速度a与
3.2. 评价指标
航行器入水过程中所受的冲击加速度会对航行器结构产生较大的冲击,所以航行器在入水过程中受到的最大冲击力越小,对航行器结构强度的要求越低,要求航行器的入水高度越小越好;在一定范围内航行器的入水深度越深,入水后向水下运动所需的能量就越少,因此航行器的入水深度越深越好,要求航行器的入水高度越大越好. 入水深度d与最大冲击加速度amax的比值反映航行器跨介性能增加所产生的结构强度要求提升量,可以在一定程度上反映航行器跨介过程的综合性能,有助于探索航行器入水参数设置的变化规律. 为了权衡入水冲击加速度和入水深度,取η作为评价指标:
3.3. 仿真分析
为了验证所设计的航行器的性能,采用计算流体动力学(computational fluid dynamics,CFD)软件Star CCM+仿真航行器的入水过程. 将飞行器入水过程设置为具有重叠网格的六自由度体运动,采用流体体积(volume of fluid,VOF)多相流模型,湍流模型为K-Epsilon模型,顶部和底部为速度入口边界,其余为对称边界. 仿真区域网格尺寸为4 000 mm×5 000 mm×8 000 mm,在对关键部位进行加密并进行网格无关性分析后划分网格数量约为421.5万,根据最大移动距离小于重叠区域中最小网格单元尺寸的原则设置仿真步长为5×10−4 s,仿真时长根据具体模型进行调节. 航行器的流体域如图7所示.
图 7

图 8
3.3.1. 入水高度的影响
图 9
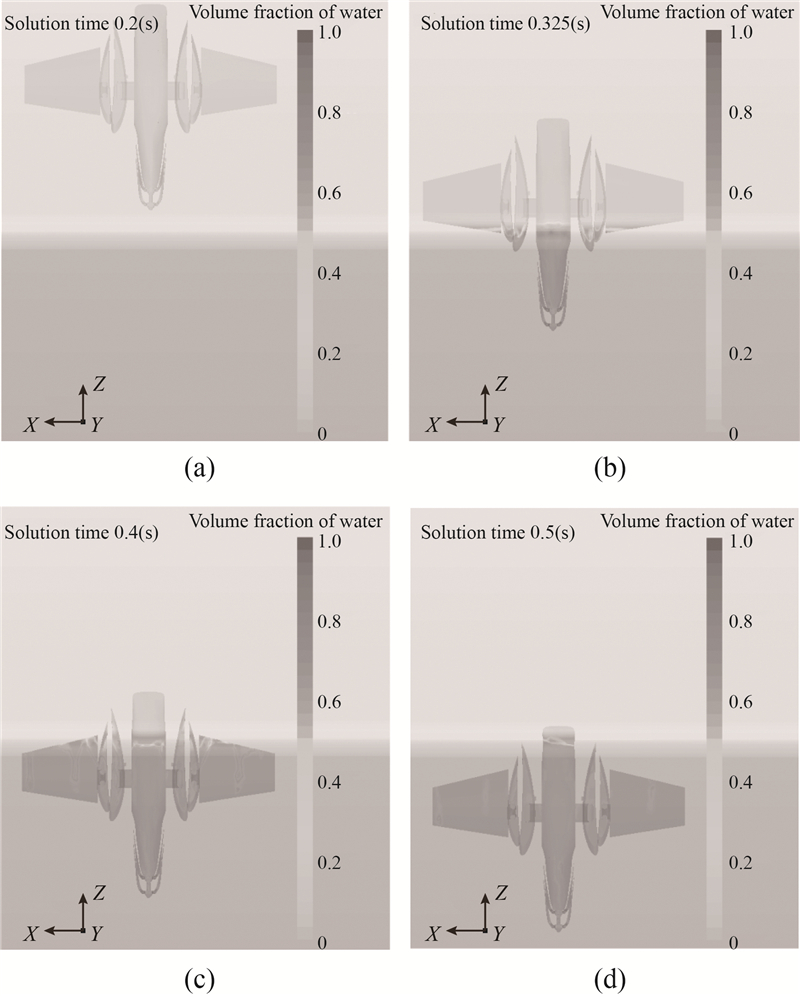
图 10
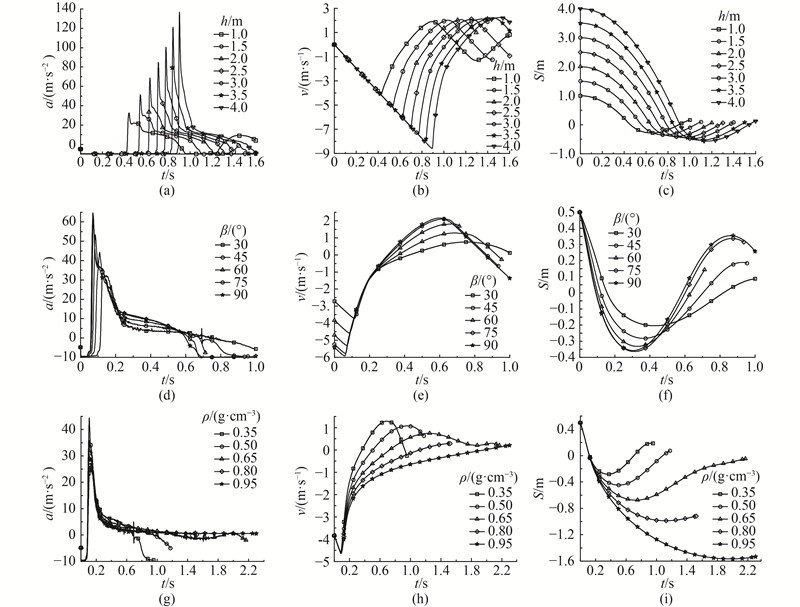
图 10 航行器加速度、速度和质心位移随时间变化的曲线
Fig.10 Acceleration, velocity and centroid displacement curves of aircraft with time
3.3.2. 入水角度的影响
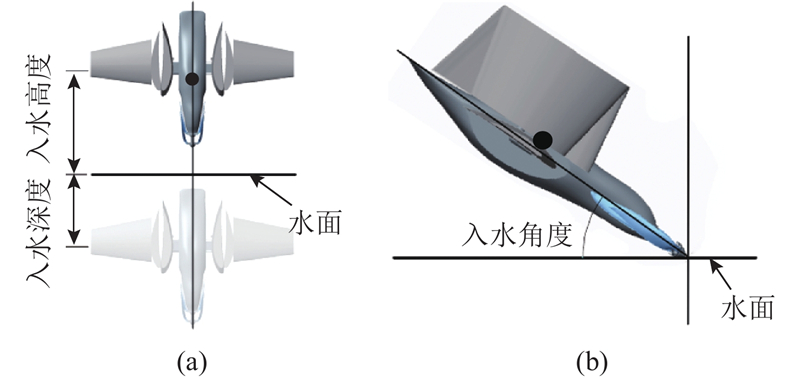
为了计算航行器入水角度β对航行器冲击加速度、水下速度和入水深度的影响,分别设置航行器轴线与水面夹角为30°、45°、60°、75°、90°的5组对照实验. 在仿真计算时,为了保证入水角度设置航行器初始位置质心距水面0.5 m,在权衡航行器初速度和入水冲击加速度后取质心下降1.5 m为标准(由自由落体公式v=
3.3.3. 航行器密度的影响
为了计算航行器密度ρa对其入水过程的影响,设置航行器轴线与水面夹角为45°时密度分别为0.35、0.50、0.65、0.80、0.95 g/cm3的5组对照实验. 在仿真计算时,初始位置质心距水面为0.5m,以质心下降1.5 m为标准计算得到初速度大小为5.425 m/s,并进一步得出各入水角度下的速度分量. 假设在仿真过程中,航行器密度不变.
如图11(a)~(c)所示分别为航行器入水高度(图8(a)的90°姿态、密度不变)、入水角度和密度(图8(b)的45°姿态、入水高度为0.5 m)变化时,航行器入水深度与航行器所受最大冲击加速度的比值η的变化曲线. 由图11(a)可知,在入水角度一定时,η随航行器入水高度的增大而减小,说明每增加单位入水高度,航行器所受的冲击加速度增加越大而入水深度增加越小,在相同条件下对结构强度的要求增加. 由图11(b)可知,在入水轴向速度和入水高度一定时,η在入水角度约为45°~60º时取得最大值,说明航行器的最佳入水角度为45°~60º. 由图11(c)可知,在入水高度和入水角度一定时,η随航行器密度的增大而增大,说明在一定范围内航行器的密度增加有利于入水深度的增加,在相同条件下有利于降低对结构强度的要求. 综合图11(a)~(c)可知,在入水深度满足要求的情况下,航行器的密度应适当增大、入水高度应适当减小,且航行器的最佳入水角度为45º~60º.
图 11
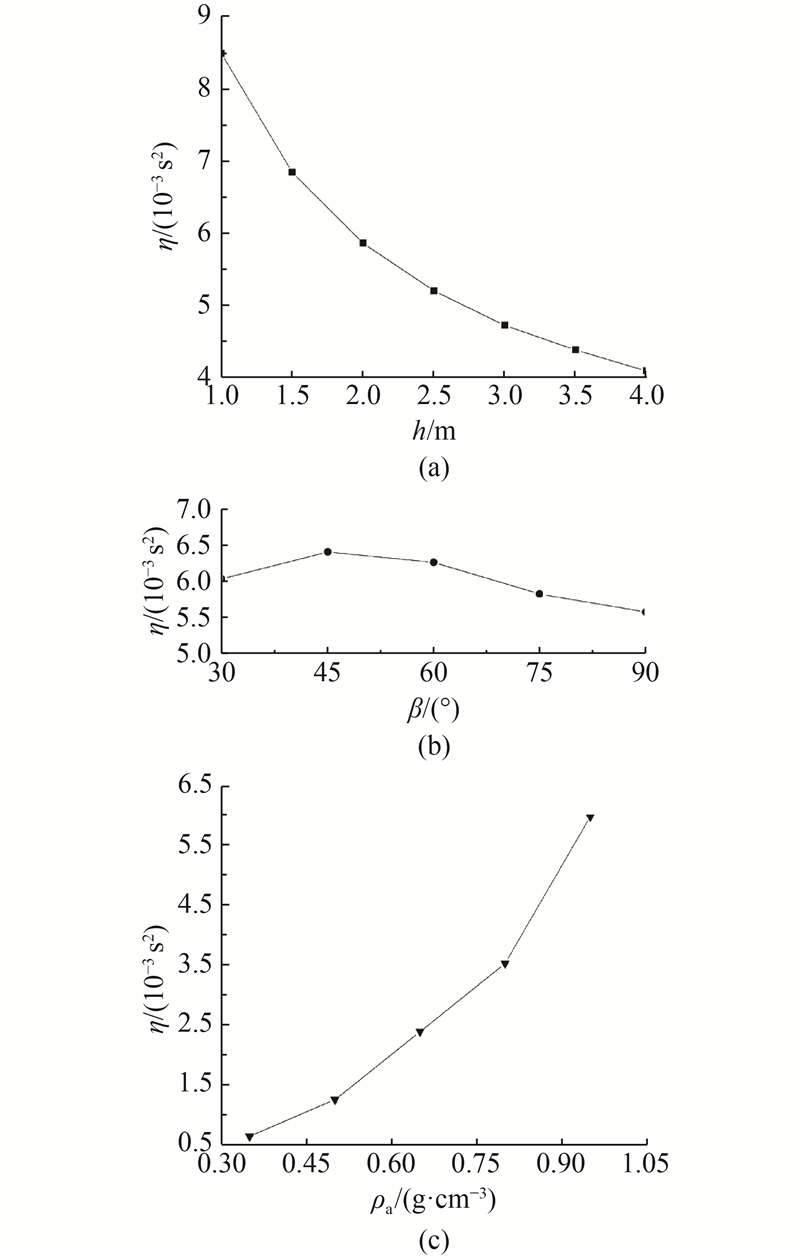
图 11 评价指标η随入水高度、入水角度和航行器密度的变化曲线
Fig.11 Curve of evaluation index η with water-inlet height, angle and density of aircraft
3.4. 与翠鸟性能的对比
图 12
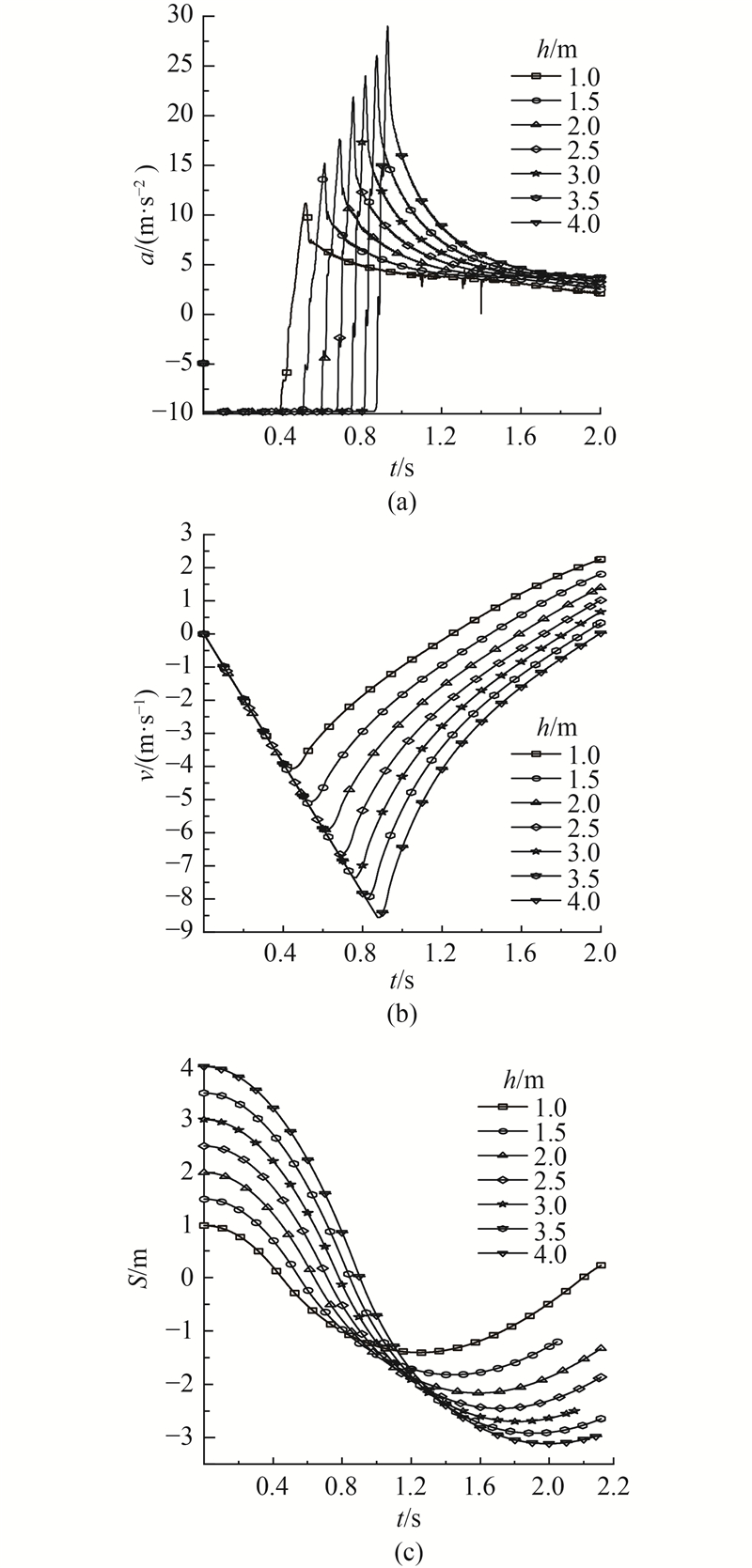
图 12 翠鸟垂直入水时加速度、速度和位移随时间变化的曲线
Fig.12 Acceleration, velocity and displacement curves when kingfisher entering water vertically
如图13所示为该航行器与自然翠鸟的压力云图. 图中,p为压强. 可以看出,航行器所受压强最大值位于螺旋桨导流罩和机翼处,而翠鸟所受压强最大值位于鸟头处. 航行器最大压强小于翠鸟,但航行器最大压强处面积远大于翠鸟,导致航行器所受的最大冲击力大于翠鸟而入水深度小于翠鸟,因而航行器的动力布局须进一步优化.
图 13
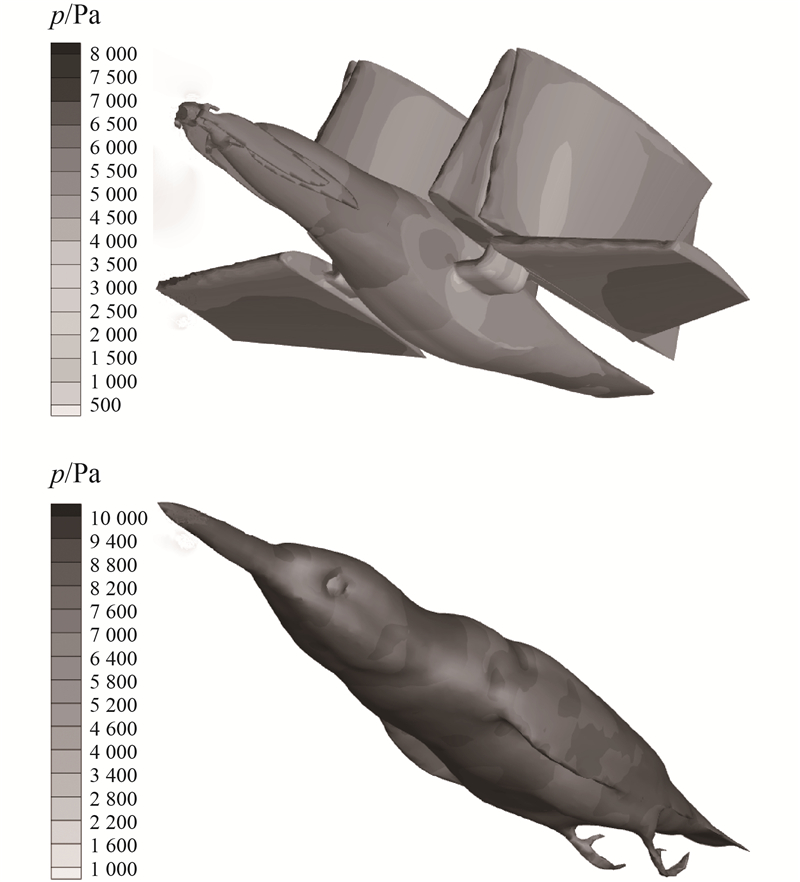
图 13 航行器和翠鸟在0.5 m/s水流中的压力云图
Fig.13 Pressure distribution of aircraft and kingfisher in 0.5 m/s water flow
4. 结 语
本研究仿翠鸟设计由单一动力源驱动的水空跨介质航行器,在空中时利用可折叠共轴双桨机构提供拉力,在水下时利用喷水推进泵提供推力,并且可以在水空跨介时快速切换动力系统,另外,折叠螺旋桨和折叠机翼的使用减小了航行器在入水及水下航行时的阻力. 通过仿真分析航行器入水过程中动力学性能的主要影响因素,可以发现,入水高度的增加将导致相同条件下对航行器结构强度的要求提高,而航行器密度的增加有利于降低对其结构强度的需求,且该航行器的最佳入水角度为45º~60º.
本研究为水空跨介质航行器动力系统的设计提供了新思路,为跨介航行器入水参数的设置提供了一定的理论依据,能够满足跨介质航行器的基本需求,具有一定的参考价值. 但是,该设计与自然翠鸟的性能还存在一定的差距,而且本研究没有涉及航行器的工作效率、稳定性等问题,下一步将围绕这些问题展开研究.
参考文献
国外跨介质飞行器发展历程及启示
[J].DOI:10.3404/j.issn.1672-7619.2016.05.032 [本文引用: 1]
Development of foreign trans-media aircraft and its enlightenment to China
[J].DOI:10.3404/j.issn.1672-7619.2016.05.032 [本文引用: 1]
水空两栖跨介质无人飞行器研究现状
[J].
Research status of water-air amphibious trans-media unmanned vehicle
[J].
国外无人水下航行器装备与技术现状及展望
[J].
Review and prospect of equipment and techniques for unmanned undersea vehicle in foreign countries
[J].
水下无人系统发展现状及其关键技术
[J].
Development and key techniques of unmanned undersea system
[J].
Review of marine animals and bioinspired robotic vehicles: classifications and characteristics
[J].DOI:10.1016/j.paerosci.2017.07.005 [本文引用: 1]
Development of a biologically inspired multi-modal wing model for aerial-aquatic robotic vehicles through empirical and numerical modelling of the common guillemot, Uria aalge
[J].
Impact of marine locomotion constraints on a bio-inspired aerial-aquatic wing: experimental performance verification
[J].
Wind and water tunnel testing of a morphing aquatic micro air vehicle
[J].DOI:10.1098/rsfs.2016.0085 [本文引用: 1]
CFD based investigation on the impact acceleration when a gannet impacts with water during plunge diving
[J].DOI:10.1088/1748-3182/8/3/036006
Design and experiment of a bionic gannet for plunge-diving
[J].DOI:10.1016/S1672-6529(13)60224-3 [本文引用: 1]
Wing load investigation of the plunge-diving locomotion of a gannet morus inspired submersible aircraft
[J].
Design and demonstration of a seabird-inspired fixed-wing hybrid UAV-UUV system
[J].DOI:10.1088/1748-3190/aad48b [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}