


经过亿万年的进化,海洋生物展现出卓越的流体形态和运动性能,为AUV的仿生设计提供了丰富的灵感来源[4-7]。海豚凭借其流线型体形和高效游动能力,成为水下机器人研究领域的重要仿生原型[8]。迄今为止,已有许多学者对仿海豚AUV开展了深入研究。Zhang等[9]开发了一款新型的仿生滑翔机器海豚,并建立了其动力学模型,进一步分析了其在游动和滑翔状态下的推进性能。Liu等[10]设计了一种基于双肌腱驱动连续体机构的机器海豚,并分析了其运动控制方法,探讨了主干形状与肌腱长度、位置和方向之间的关系。Li等[11]通过数值模拟探究了尾鳍柔韧性对机器海豚自偏航运动的影响。Wu等[12]实现了滑翔机器海豚的机电一体化设计,并通过一系列实验验证了其动力学模型的有效性。Li等[13]通过数值模拟分析了仿生海豚利用胸鳍实现自主滚转运动的性能。
然而,目前针对仿海豚AUV的研究主要集中在其运动控制上,而对于如何优化AUV外形的探讨明显不足。相关研究表明,AUV的轮廓形状对其航行阻力有巨大影响。海豚的流线型轮廓有助于降低阻力,但在实际工程应用中还需要关注AUV的内部容积是否符合要求。基于此,本文通过模仿海豚的外形轮廓,设计了一款仿海豚AUV并对其外形进行优化。为了实现低阻力和大容积,利用三维软件建立AUV的参数化模型并计算其初始阻力;随后,采用最优拉丁超立方抽样法建立样本库,构建对应的Kriging代理模型,并采用NSGA-II(non-dominated sorting genetic algorithm-II,二代非支配排序遗传算法)进行优化求解,以得到最优的AUV外形设计方案。
1 仿海豚AUV参数化建模与仿真
海豚身体呈现典型的“纺锤体”轮廓,其圆钝的头型有利于减小压差阻力,宽大的中部可提供充足的容纳空间,平滑收窄的尾部能够最大限度地减小压差阻力和摩擦阻力。这种形态是流体动力学中阻力最小的形状之一,本文旨在模仿海豚设计一款低阻力的AUV。图1所示为仿海豚AUV的简化几何模型。
图1

1.1 参数化模型
相较于普通样条曲线需要较多参数来拟合轮廓,Myring线型[14]能够以较少的参数简洁地描述轮廓。对于海豚的流线型轮廓,Myring线型具有较高的拟合精度。Myring型曲线方程可表示为:
式中:
图2
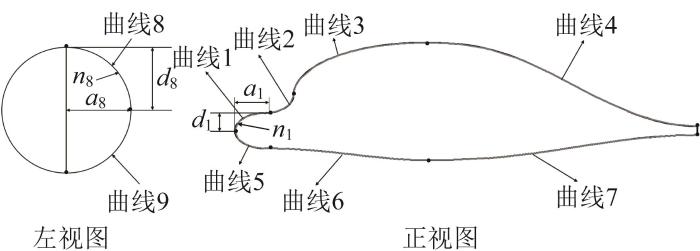
表1 设计变量的初始值和取值范围
Table 1
| 参数 | 初始值 | 上限 | 下限 | 备注 |
|---|---|---|---|---|
| 60 | 40 | 80 | 曲线1的高度 | |
| 100 | 80 | 120 | 曲线1的长度 | |
| 2 | 1 | 3 | 曲线1的饱和度 | |
| 60 | 40 | 80 | 曲线2的高度 | |
| 100 | 80 | 120 | 曲线2的长度 | |
| 2 | 1 | 3 | 曲线2的饱和度 | |
| 180 | 160 | 200 | 曲线3的高度 | |
| 440 | 340 | 540 | 曲线3的长度 | |
| 2 | 1 | 3 | 曲线3的饱和度 | |
| 960 | 800 | 1 200 | 曲线4的长度 | |
| 3 | 1 | 5 | 曲线4的饱和度 | |
| 60 | 40 | 80 | 曲线5的高度 | |
| 2 | 1 | 3 | 曲线5的饱和度 | |
| 40 | 30 | 50 | 曲线6的高度 | |
| 2 | 1 | 3 | 曲线6的饱和度 | |
| 3 | 1 | 5 | 曲线7的饱和度 | |
| 200 | 100 | 300 | 曲线8的高度 | |
| 200 | 160 | 240 | 曲线8的长度 | |
| 2 | 1 | 3 | 曲线8的饱和度 | |
| 2 | 1 | 3 | 曲线9的饱和度 |
1.2 控制方程
通过求解雷诺平均纳维-斯托克斯(Reynolds- averaged Navier-Stokes, RANS)方程[15]来模拟AUV周围的流体运动,方程如下:
式中:
为了求解RANS方程,需要引入湍流模型[15]。本文选择标准
式中:
为匹配标准
式中:
标准壁面函数法要求第1层网格节点布置在对数律层内,因此需保证边界层网格高度满足30<
1.3 计算域和边界条件
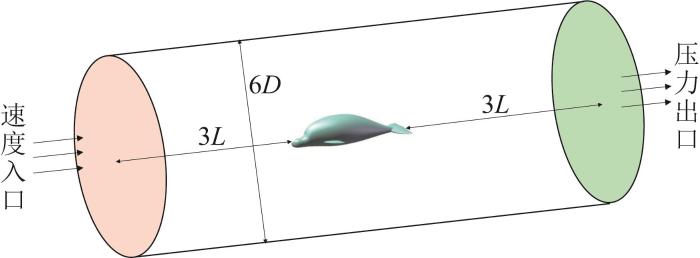
本文使用Fluent软件对AUV的阻力进行计算。首先,需要确定一个合适的计算域。较大的计算域需要更多的计算资源,而计算域过小可能会导致计算不准确。此外,计算域的设计应确保可以忽略阻塞效应。计算域的阻塞效应可通过阻塞比(blocking ratio, BR)来评估,当计算域中的BR小于6%时,说明阻塞对压力分布和阻力系数的影响可忽略不计[16]。如图3所示,AUV艏部与计算域入口的距离为3L(L为AUV的总长度),艉部与计算域出口的距离为3L;AUV与计算域上、下壁面的距离为3D(D为AUV的最大直径)。经分析,所建立的计算域的BR约为1.05%,这意味着可忽略阻塞效应。将计算域前壁面设为速度入口,初始速度设置为2 m/s,后壁面设为压力出口;在计算域两侧施加对称边界条件,并在AUV的表面施加无滑移条件。
图3
1.4 网格独立性分析
图4
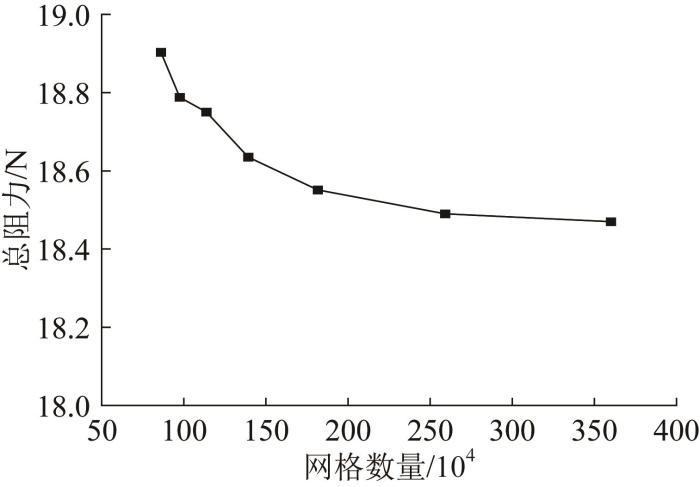
图4
AUV总阻力与网格数量的关系
Fig.4
Relationship between total resistance of AUV and number of grids
为了减小由网格数量引起的误差,需要验证网格独立性。以网格收敛指数r作为网格收敛的指标,当r<1和
由
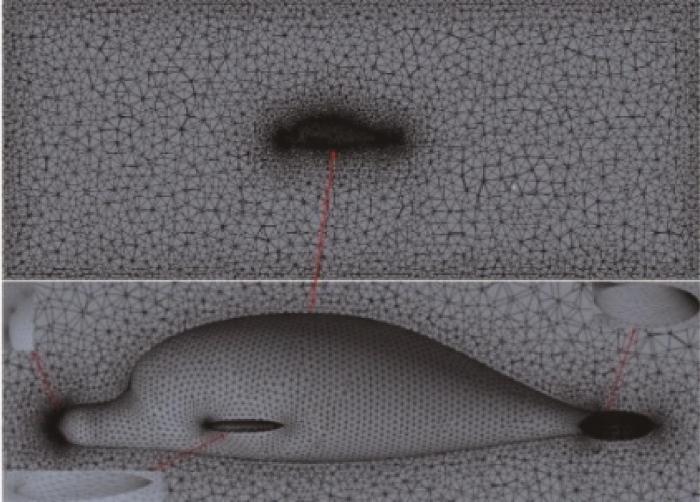
图5
2 面向AUV外形优化的Kriging代理模型构建
2.1 最优拉丁超立方抽样法
通过参数化建模生成仿海豚AUV的三维几何模型,再利用本文的CFD仿真框架(RANS方程、标准
2.2 Kriging代理模型
Kriging代理模型是一种根据设计变量的相关性和变异性对有限区域中目标变量进行无偏和最优估计的方法[19],它是一种常用于确定性数据插值的技术。与其他近似建模技术相比,Kriging代理模型仅依赖估计点邻近的样本信息,对复杂的高度非线性响应面具有优异的拟合能力,且具有局部和全局统计属性,在样本点处可实现精确插值。基于此,本文采用Kriging代理模型建立AUV总阻力和包络体积这2个目标函数的数学模型。Kriging代理模型的基本表达式如下:
式中:
高斯随机过程
式中:
2.3 代理模型的拟合精度验证
图6
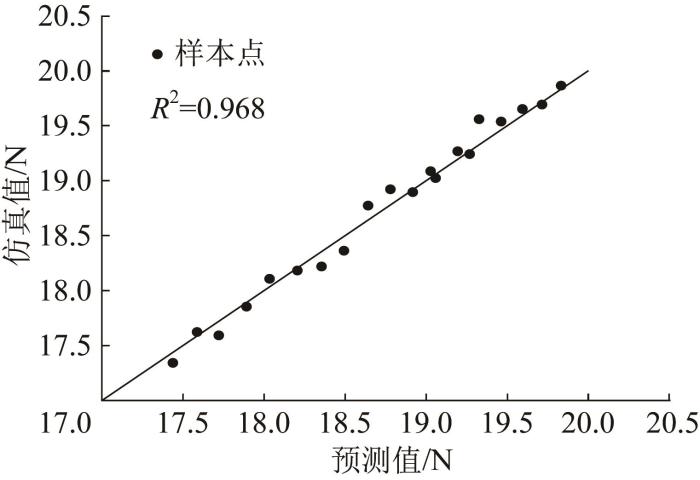
图6
AUV总阻力的仿真值与预测值对比
Fig.6
Comparison of simulated and predicted values of total resistance of AUV
图7
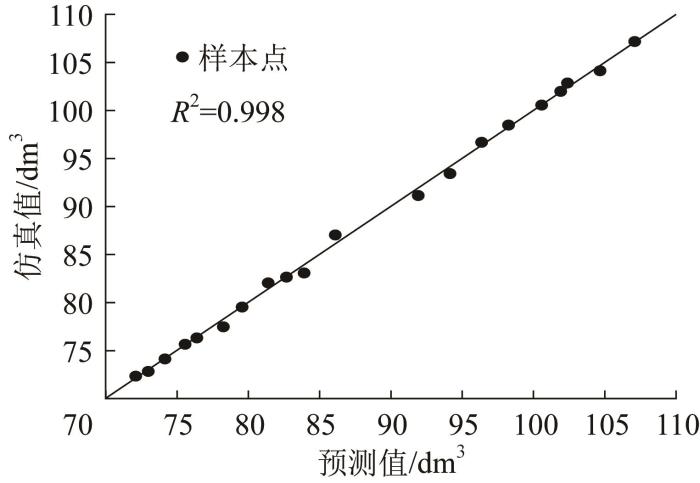
图7
AUV包络体积的仿真值与预测值对比
Fig.7
Comparison of simulated and predicted values of envelope volume of AUV
3 AUV外形多目标优化
3.1 NSGA-II介绍
图8
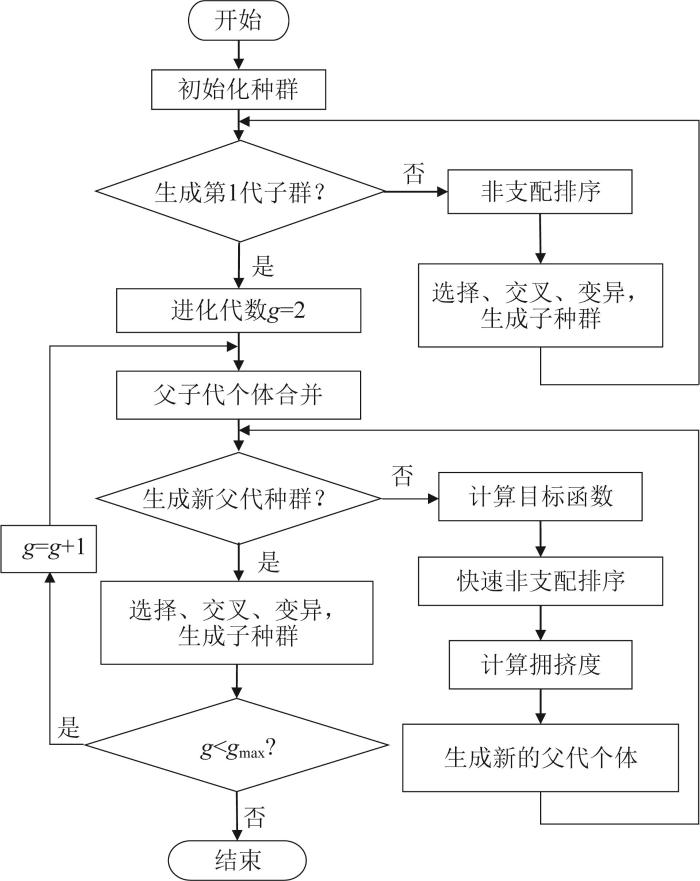
本文利用NSGA-II的全局优化特性,以AUV总阻力最小化、包络体积最大化为目标,寻找最优的AUV几何形状参数。针对上述多目标优化问题,建立相应的数学模型,具体如下:
式中:
NSGA-II的控制参数设置如下:种群规模为200,交叉概率为0.9,最大进化代数为200。由此得到100个Pareto最优解,如图9所示。考虑到2个优化目标之间存在冲突,即在总阻力减小的同时包络体积也减小,无法同时达到最优,从Pareto最优解集中选取4个特殊的最优解作为候选方案。从图9中可以看出,方案A对应的总阻力最小,但包络体积也最小;方案D对应的包络体积最大,但总阻力也最大。与方案A相比,方案B对应的总阻力仅增大0.46%,但包络体积增大了5.87%。与方案D相比,方案C对应的包络体积减小了4.27%,总阻力减小了6.17%。相比之下,方案B和C为较优方案,这2个方案中的设计变量取值如表2所示。由表2可知,相较于方案C,方案B对应的总阻力较小,而包络体积仅减小了0.77%,即方案B可在显著增大包络体积的同时保持相对较低的总阻力,更好地平衡了两者的矛盾。因此,本文选择方案B作为最终的AUV外形优化方案。
图9
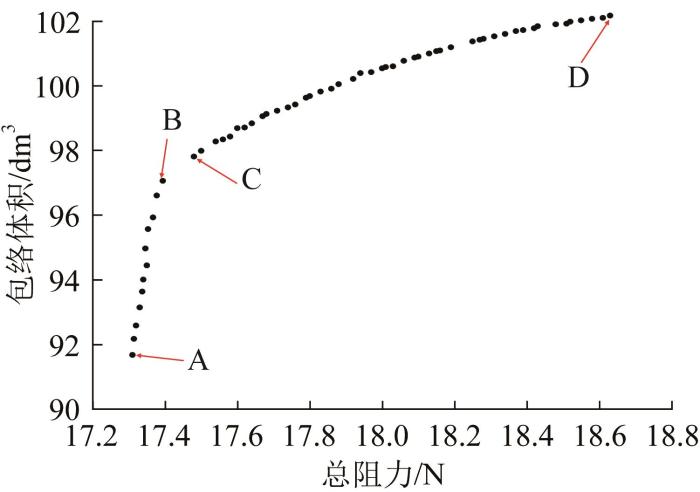
图9
AUV外形多目标优化的Pareto最优解集
Fig.9
Pareto optimal solution set for multi-objective optimization of AUV shape
表2 AUV外形的初始方案与优化方案对比
Table 2
| 参数 | 初始方案 | 优化方案B | 优化方案C |
|---|---|---|---|
| 60 | 40.33 | 40.41 | |
| 100 | 81.18 | 80.24 | |
| 2 | 2.99 | 2.99 | |
| 60 | 77.51 | 77.76 | |
| 100 | 119.54 | 119.53 | |
| 2 | 1.04 | 1.04 | |
| 180 | 164.58 | 171.35 | |
| 440 | 344.08 | 345.31 | |
| 2 | 2.95 | 2.77 | |
| 960 | 1 198.23 | 1 198.31 | |
| 3 | 2.67 | 2.66 | |
| 60 | 79.80 | 79.82 | |
| 2 | 1.83 | 1.46 | |
| 40 | 30.27 | 34.46 | |
| 2 | 2.48 | 2.68 | |
| 3 | 4.97 | 4.97 | |
| 200 | 299.44 | 281.37 | |
| 200 | 191.52 | 196.49 | |
| 2 | 2.98 | 2.99 | |
| 2 | 1.56 | 1.71 | |
| 总阻力/N | 18.63 | 17.39 | 17.48 |
| 包络体积/ | 91.68 | 97.06 | 97.81 |
鉴于AUV的外形由20个设计变量决定,为了研究优化目标对各设计变量的敏感性和设计变量的全局效应,基于所构建的Kriging代理模型,对所有设计变量进行灵敏度分析。图10和图11所示分别为AUV的总阻力和包络体积对20个设计变量的灵敏度分析结果。由图10可以看出,参数
图10
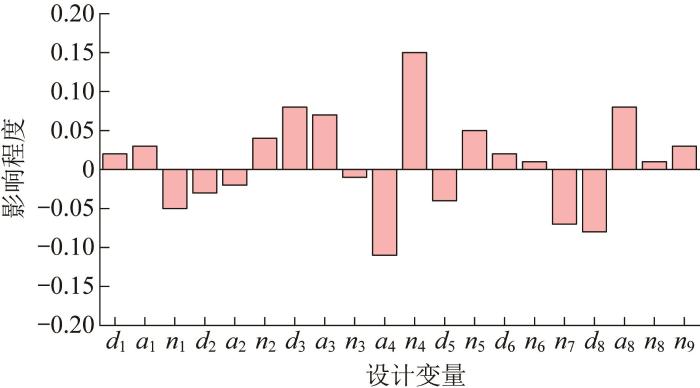
图10
AUV总阻力灵敏度分析结果
Fig.10
Sensitivity analysis result for total resistance of AUV
图11
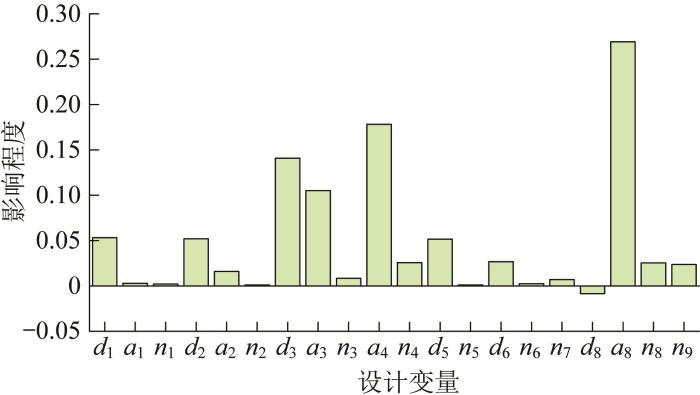
图11
AUV包络体积灵敏度分析结果
Fig.11
Sensitivity analysis result for envelope volume of AUV
3.2 优化结果与分析
图12
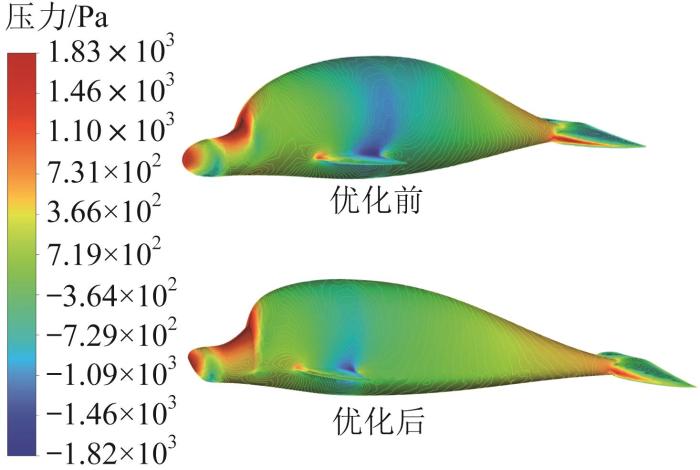
图12
优化前后AUV的压力云图
Fig.12
Pressure contour plots of AUV before and after optimization
图13
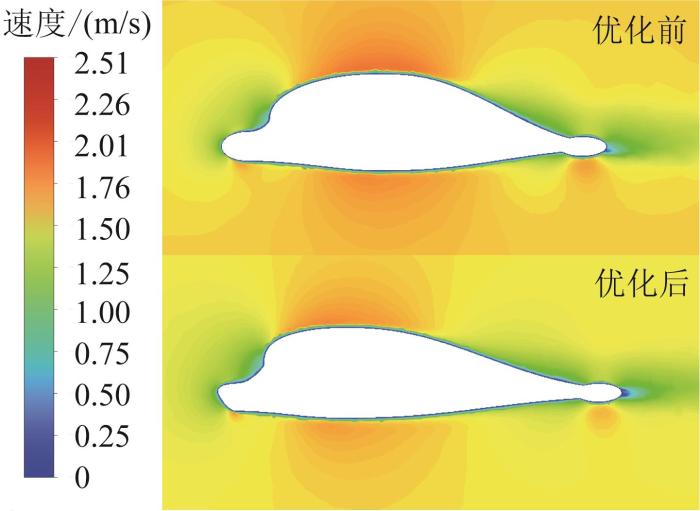
图13
优化前后AUV周围流场的速度云图
Fig.13
Velocity contour plots of flow field around AUV before and after optimization
表3 优化后AUV总阻力的仿真值与预测值对比
Table 3
| 优化方案 | 总阻力/N | 相对误差/% | |
|---|---|---|---|
| 预测值 | 仿真值 | ||
| B | 17.39 | 17.56 | 0.98 |
| C | 17.48 | 17.72 | 1.37 |
表4 优化前后AUV的总阻力构成对比
Table 4
| 阻力类型 | 初始 方案 | 优化 方案B | 变化量 | 变化率/ |
|---|---|---|---|---|
| 压差阻力/N | 10.19 | 8.91 | -1.28 | -12.56 |
| 摩擦阻力/N | 8.44 | 8.65 | +0.21 | +2.49 |
| 总阻力/N | 18.63 | 17.56 | -1.07 | -5.74 |
图14
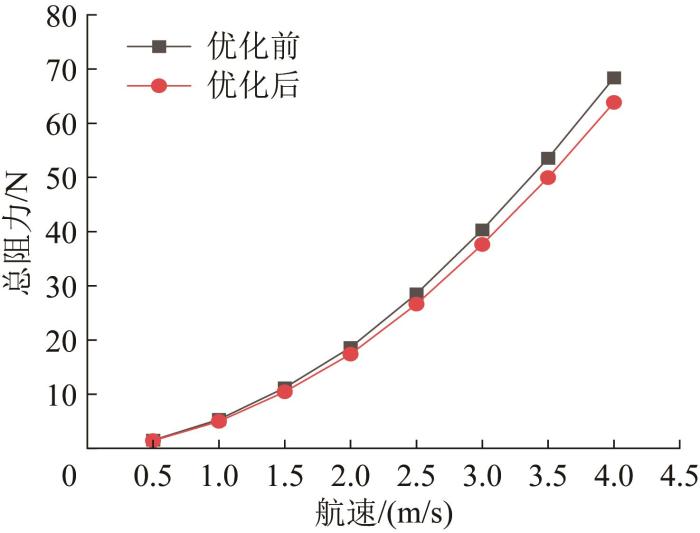
图14
优化前后AUV在不同航速下的总阻力对比
Fig.14
Comparison of total resistance of AUV before and after optimization at different navigation speeds
水平面稳定性指数
式中:
对优化后的AUV进行水动力分析,得到AUV的水动力系数,结果如表5所示。
表5 AUV的水动力系数
Table 5
| 水动力系数 | 数值 |
|---|---|
| -0.247 553 | |
| -0.007 264 | |
| -0.016 574 | |
| -0.021 381 |
将表5中的水动力系数代入
4 结 论
针对AUV外形设计中低阻力与大容积之间的矛盾,本文以海豚为仿生对象,结合参数化建模、CFD仿真、Kriging代理模型与NSGA-II,成功优化了一款仿海豚AUV的外形,主要结论如下。
1)所构建的参数化几何模型用相对较少的参数(20个设计变量)高效灵活地描述了仿海豚AUV复杂的外形轮廓,为其外形优化奠定了坚实的几何基础,显著提升了设计效率。
2)采用最优拉丁超立方抽样法生成样本点,并构建了描述AUV总阻力、包络体积与设计变量之间映射关系的Kriging代理模型,对应代理模型的决定系数分别达到0.968和0.998,具有较高的拟合精度。CFD仿真结果与Kriging代理模型预测结果的最大相对误差仅为1.37%,证明了代理模型的可靠性,大幅提高了计算效率。
3)使用NSGA-II求解得到了AUV外形多目标优化模型的Pareto最优解集。与优化前相比,优化后的AUV在2 m/s航速下的总阻力降低了5.74%,同时包络体积增大了5.87%。流场仿真分析表明,优化后AUV尾部的压力梯度趋于平缓,压差阻力显著降低;尾部速度梯度减小,边界层分离得到抑制,有效提升了水动力学性能。水平面稳定性指数计算结果表明,优化后的AUV具有动稳定性。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.164
参考文献
Actuation and locomotion of miniature underwater robots: a survey
[J].
Parametric geometric model and shape optimization of an underwater glider with blended-wing-body
[J].
水下机器人减阻设计研究进展
[J].
Advances in drag reduction design for underwater robots
[J].
Research status of bionic amphibious robots: a review
[J].
仿双髻鲨头部的仿生机器鱼外形设计及其流场特性
[J].
Shape design and flow field characteristics of a robotic fish imitating the head of a hammerhead
[J].
仿金枪鱼三维建模及流场受力分析
[J].
Tuna 3D-modeling and stress calculation in flow field
[J].
水下捕捞机器人耐压舱仿生造型设计
[J].
Bionic modeling design of compressive cabin of underwater fishing vehicle
[J].
Numerical simulation of bionic underwater vehicle morphology drag optimisation and flow field noise analysis
[J].
Design and analysis of a bionic gliding robotic dolphin
[J].
Design and analysis of a novel tendon-driven continuum robotic dolphin
[J].
Hydrodynamics study of dolphin's self-yaw motion realized by spanwise flexibility of caudal fin
[J].
Towards a gliding robotic dolphin: design, modeling, and experiments
[J].
The hydrodynamics of self-rolling locomotion driven by the flexible pectoral fins of 3-D bionic dolphin
[J].
A theoretical study of body drag in subcritical axisymmetric flow
[J].
三体模块化渔业监测AUV结构设计及外形优化
[J].
Structural design and shape optimization of three-body modular fishery monitoring AUV
[J].
The effects of head form on resistance performance and flow characteristics for a streamlined AUV hull design
[J].
Multi-objective optimization of an autonomous underwater vehicle shape based on an improved Kriging model
[J].
Shape optimization of autonomous underwater helicopters based on different parameter curves and various optimization algorithms
[J].
Multi-objective shape optimization of autonomous underwater vehicle by coupling CFD simulation with genetic algorithm
[J].
Multi-objective shape optimization of underwater vehicles based on an adaptive sampling algorithm
[J].
Three-dimensional configuration optimization of X semi-dynamic rudder for fully appended AUV based on response surface methodology and NSGA-II
[J].
Numerical analysis of stability and manoeuvrability of autonomous underwater vehicles (AUV) with fishtail shape
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}