本文链接 :https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.04.129
在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] 。特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] 。六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] 。因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性。大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] 。
在现有六足机器人的运动控制中,通常将CPG模型中神经元细胞之间的相互抑制系数、神经元振荡器的适应系数以及CPG模型参数作为确定性参数来考虑,忽略了其不确定性对机器人运动稳定性的影响[7 ] ,导致CPG模型的节律周期信号响应与期望波形之间存在较大差异,致使机器人的控制失效,其运动稳定性难以保障。因此,需要研究一种针对CPG模型不确定性参数的优化设计方法,以提高机器人的运动稳定性,有效控制机器人姿态[8 ] 。
目前,大多数学者在研究不确定性参数对系统可靠性的影响时,倾向于采用概率模型来描述不确定性变量[9 ] ,并形成了相应的优化设计方法。然而,当缺乏足够的不确定性变量的数据样本时,就无法准确地建立相应的概率模型,导致概率模型无法准确地描述不确定性变量的信息[10 ] 。而区间模型不需要精确的概率分布[11 ] ,只需要确定其上下限,因此在一定程度上避免了概率模型的局限性。在自由度冗余、控制过程复杂的六足机器人的优化设计中,须考虑多种不同类型的设计参数,以控制机器人的运动稳定性。因此,本文采用概率-区间混合模型来描述六足机器人不确定性变量信息,并对机器人的运动稳定性进行优化设计。基于概率-区间混合模型的六足机器人运动稳定性的优化设计,本质上是一个三层嵌套的优化问题。如果采用传统的优化方法进行求解,则计算效率低下,计算成本较高。此外,计算高维、强非线性的数值模型往往会产生计算量过大和求解失败等问题。因此,本文采用Karush-Kuhn-Tucker(KKT)最优化条件[12 ] 和最大熵原理,提出了一种解耦策略,将三层嵌套的优化设计问题转化为单层嵌套的优化设计问题,以提高求解最优设计问题的效率。
综上所述,本文提出了一种基于概率-区间混合模型的六足机器人运动稳定性优化设计方法。首先,建立了六足机器人的运动控制模型和CPG模型;其次,针对六足机器人运动稳定性的优化设计问题,采用KKT最优化条件和最大熵原理进行解耦,将三层嵌套优化问题转化为单层优化问题;最后,基于径向基函数建立六足机器人运动稳定性近似优化问题,并且利用遗传算法进行高效求解。
1 六足机器人运动控制模型的建立
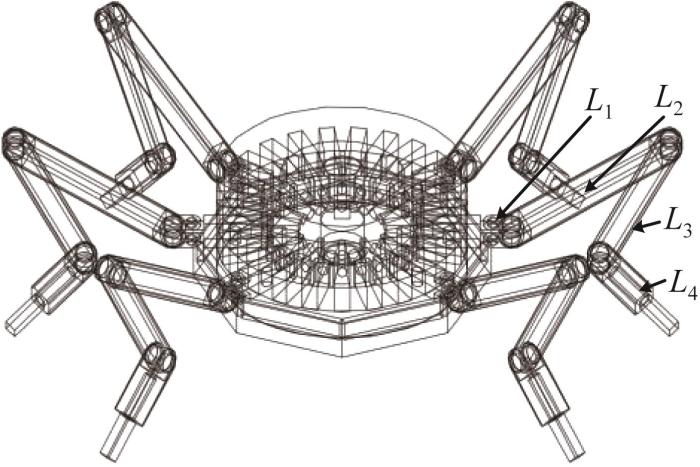
在六足机器人姿态控制过程中,机器人利用腿部关节的旋转来调整自身的运动姿态,并保持运动稳定性[13 ] 。作者利用工业建模软件构建了六足机器人的数值模型和运动仿真环境[14 ] ,为机器人的姿态控制研究提供依据。六足机器人的结构模型如图1 所示。其主要由机器人躯体、运动足以及腿部旋转关节等部件构成[15 ] ,其中:机器人躯体与6个运动足按六边形的形式相互连接;腿部关节采用内膝肘式配置方式,腿部关节之间连杆的长度分别为L 1 、L 2 、L 3 和L 4 。其结构参数如表1 所示。
图1
图1
六足机器人结构模型
Fig.1
Structure model of hexapod robot
在传统的六足机器人姿态控制研究中,通常对机器人腿部结构进行建模,并采用逆运动学方法计算其腿部关节的旋转角度[16 ] 。采用传统的方法控制六足机器人的运动稳定性存在着不少问题,如机器人建模的复杂性问题、逆运动学求解的不唯一性问题以及在复杂多变的工况下六足机器人的6个运动足与腿部旋转关节之间的协调性问题。
为了提高六足机器人的运动稳定性,本文基于Matsuoka和Kimura模型[17 ] ,构建了一种CPG模型,通过CPG模型的节律周期信号响应来控制六足机器人腿部关节的旋转。
T r μ f , i ' + μ f , i = b v f , i + a y e , i + c T r v f , i ' + v f , i ' = y f , i T r μ e , i ' + μ e , i = b v e , i + a y e , i + c T r v e , i ' + v e , i ' = y e , i y f , e , i = g μ f , e , i = μ f , i - μ e , i i = 1 , ⋯ , n g μ = m a x μ , 0
式中:T r 为节律信号的上升时间,μ v yi 为神经元振荡器节律信号的输出,a b c g ( u ) i i
采用CPG模型控制六足机器人腿部关节转动时,如果将CPG模型的不确定性参数当作确定性参数来考虑,会导致CPG模型的节律周期信号响应不稳定,且与期望的节律周期信号响应有较大差异,致使六足机器人的运动稳定性难以得到保障。因此,为了使CPG模型输出稳定、连续、平滑且具有相位关系的周期节律信号,需要研究一种针对CPG模型不确定性参数的优化设计方法。
2 六足机器人运动稳定性优化数学模型的建立
为了确保六足机器人的运动稳定性,将机器人质心位移作为机器人稳定系统的优化目标;考虑到CPG模型输出的周期节律信号的稳定、连续、平滑的特性与模型不确定性参数中的抑制系数a 和适应系数b 的设置有关,因此将其作为设计变量X X 1 和X 2 ;同时,考虑到机器人腿部各关节旋转角度的相位关系与CPG模型中初值矩阵参数的设置有关,因此将CPG模型中初值矩阵参数分别作为概率变量和区间变量;此外,将机器人腿部关节输出角度差的可靠性指标和机器人运动速度的可靠性指标值作为约束条件。因此,得到六足机器人运动稳定性优化数学模型:
m i n f w X , μ P , μ Q s . t . β 1 g J X , P , Q = 1 - J X , P , Q ≥ 0 ≥ β t , 1 β 2 g S X , P , Q = S X , P , Q - 0.2 ≥ 0 ≥ β t , 2 X = ( X 1 X 2 ) T - 4 ≤ X 1 ≤ - 2.8 , - 15 ≤ X 2 ≤ - 8 P ∼ N ( μ P , σ P ) , Q = 0.005 , 0.015
式中:f w β 1 β 2 g J g S J 和S 分别为机器人腿部关节角度差函数和速度函数;P 为概率变量,Q 为区间变量;β t , 1 β t , 2 β t , 1 β t , 2 N ( μ P , σ P ) P 的均值和标准差。
式(2)所示的优化数学模型涉及内外层嵌套的可靠性优化[18 ] ,即:在外层,是对六足机器人质心位移可靠性指标求解的单层优化;在内层,由于极限状态功能函数中同时存在概率变量和区间变量,求解可靠性指标是双层优化设计问题。因而,六足机器人运动稳定性优化设计问题是内外三层嵌套的,如果采用传统的优化方法求解,效率低且时间成本较高,无法满足优化设计的要求[19 ] 。因此,需要采取一种解耦策略,高效求解六足机器人运动稳定性优化设计问题。
3 六足机器人运动稳定性优化问题的求解
3.1 优化问题的解耦方法
由于β 1 β 2 β 1
在六足机器人运动稳定性优化设计问题中,β 1 式(3)求解[20 ] :
β 1 = m i n U U s . t . m i n Q ∈ Ω Q G J X , U , Q = 0 (3)
式中:U 为随机变量,G J X , U , Q Ω Q Q 的集合。
由式(3)可知,β 1 式(4)求解外层可靠性指标β L ,利用式(5)求解内层极限状态功能函数G J X , U , Q * = 0
β L = m i n U U s . t . G J X , U , Q * = 0 (4)
G J X , U , Q * = m i n Q ∈ Ω Q G J X , U , Q = 0 0.005 ≤ Q ≤ 0.015 (5)
为了将求解外层可靠性指标和内层极限状态函数的双层优化设计问题转化为单层优化设计问题,本文采用KKT最优化条件,使Q 服从均匀分布u (0.005, 0.015),则g J X , P , Q
g J X , P , u = 1 - J X , P , u (6)
因此,将式(6)和(3)合并来求解可靠性指标,可表示为:
β 1 = m i n U , V U 2 + V 2 s . t . G J ' X , U , V = 0 (7)
式中:V 为随机变量u 转换成标准正态下的变量,G J ' X , U , V g J X , P , u
如式(7)所示,将求解可靠性指标的双层嵌套优化设计问题转换为仅具有概率模型的单层优化设计问题。
式(6)中极限状态功能函数g J X , P , u P 和u 都为概率变量,因此本文基于最大熵原理[21 ] ,利用求积分的方法求出式(6)中极限状态功能函数的最大失效概率p J , f β 1
y 1 = g J - μ g J σ g J (8)
式中:μ g J g J X , P , u σ g J g J X , P , u
其次,计算y 1 的前4阶矩v j , y 1 j =0, 1, …, 4),表示为:
E y j , 1 = v j , y 1 (9)
v 0 , y 1 = 1 v 1 , y 1 = 0 v 2 , y 1 = 1 v 3 , y 1 = μ 3 , g J X , P , u σ 3 , g J X , P , u v 4 , y 1 = μ 4 , g J X , P , u σ 4 , g J X , P , u
最后,建立求解p J , f 式(10)所示。
p J , f = P r g J X , P , u ≤ 0 = P r y 1 ≤ μ g J σ g J = ∫ - ∞ μ g J σ g J e x p - ∑ k = 0 4 a k 1 y k , 1 d y 1 (10)
式中:P r ( • ) g J X , P , u a k 1 k =0, 1, …, 4)可通过式(11)可求得。
∫ - ∞ + ∞ y j , 1 e x p - ∑ k = 0 4 a k 1 y k , 1 d y j = v j , y 1 (11)
β 1 = - Φ - 1 p J , f (12)
式中:Φ - 1 ·
本文采用KKT最优化条件,并基于最大熵原理,对六足机器人的运动稳定性优化设计问题进行解耦处理,从而将三层嵌套化设计问题转化为单层优化设计问题,并采用积分方法进行高效求解。
m i n f w X , μ P , μ Q s . t . ∫ - ∞ μ g J σ g J e x p - ∑ k = 0 4 a k 1 y k , 1 d y 1 ≤ Φ - β t , 1 ∫ - ∞ μ g s σ g s e x p - ∑ k = 0 4 a k 2 y k , 2 d y 2 ≤ Φ - β t , 2 X = X 1 X 2 T - 4 ≤ X 1 ≤ - 2.8 , - 15 ≤ X 2 ≤ - 8 P ∼ N μ P , σ P , Q = 0.005 , 0.015 (13)
本文通过解耦策略,将六足机器人运动稳定性优化设计问题中的可靠性指标三层嵌套问题解耦成单层求解问题,有效提高了计算效率。
3.2 近似优化模型的建立
在六足机器人运动稳定性优化设计中,目标函数和极限状态功能函数无法通过显性函数表达式表示出来。由于目标函数和极限状态功能函数具备隐函数特征,本文首先采用拉丁超立方设计(latin hypercube design,LHD)方法[22 ] ,均匀采集初始实验样本点;然后,利用径向基函数(radial basis function, RBF)[23 ] 构建六足机器人运动稳定性优化的近似模型。因此,将六足机器人运动稳定性优化的数学模型转化为:
m i n f ˜ w X , μ P , μ Q s . t . ∫ - ∞ μ g ˜ J σ g ˜ J e x p - ∑ k = 0 4 a k 1 y ˜ k , 1 d y 1 ≤ Φ - β t , 1 ∫ - ∞ μ g ˜ s σ g ˜ s e x p - ∑ k = 0 4 a k 2 y ˜ k , 2 d y 2 ≤ Φ - β t , 2 X = X 1 X 2 T - 4 ≤ X 1 ≤ - 2.8 , - 15 ≤ X 2 ≤ - 8 P ∼ N μ P , σ P , Q = 0.005 , 0.015 (14)
3.3 优化设计过程
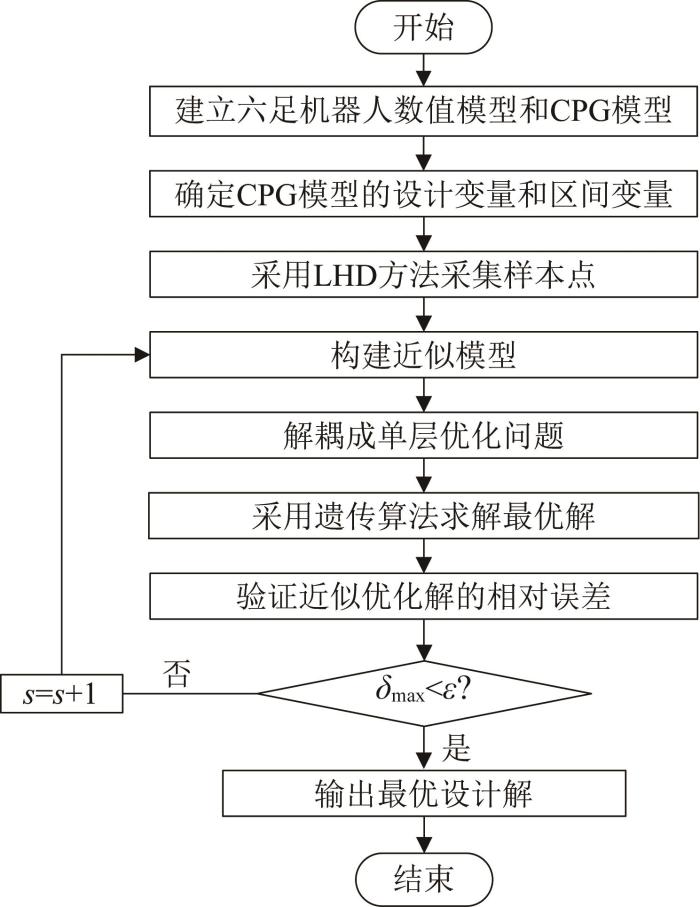
六足机器人运动稳定性优化设计的方法如图2 所示,其具体流程如下。
图2
图2
六足机器人运动稳定性优化设计方法
Fig.2
Optimization design method for kinematic stability of hexapod robot
Step 1:建立六足机器人数值模型,并基于Matsuoka和Kimura模型建立CPG模型。
Step 2:基于六足机器人CPG模型,确定设计变量X = X 1 X 2 T
Step 3:针对优化参数的随机变量,采用LHD方法均匀采样,设置初始循环次数s ,允许误差ε <10%。
Step 4:利用采集的样本点计算出响应值,并基于RBF构建目标函数和极限状态功能函数的近似模型。
Step 5:采用KKT最优化条件和基于最大熵原理的二次四阶矩方法,对六足机器人运动稳定性优化设计问题中的可靠性指标进行解耦。
Step 6:基于遗传算法对六足机器人运动稳定性优化近似模型进行求解。
Step 7:计算解得的最优设计解f w f ˜ w δ m a x δ m a x = m a x ( f w - f ˜ w ) / f w δ m a x < ε
4 六足机器人运动稳定性优化设计方法的应用
将本文提出的优化方法应用于六足机器人运动稳定性设计中。首先,基于概率-区间混合模型来描述CPG模型中的不确定性变量;其次,采用LHD方法均匀采集60个初始样本点,并通过六足机器人的运动仿真获得f ˜ w ε <10%。因此,当目标函数值f w =3.507 3 mm收敛时,求得优化设计解 X T 。
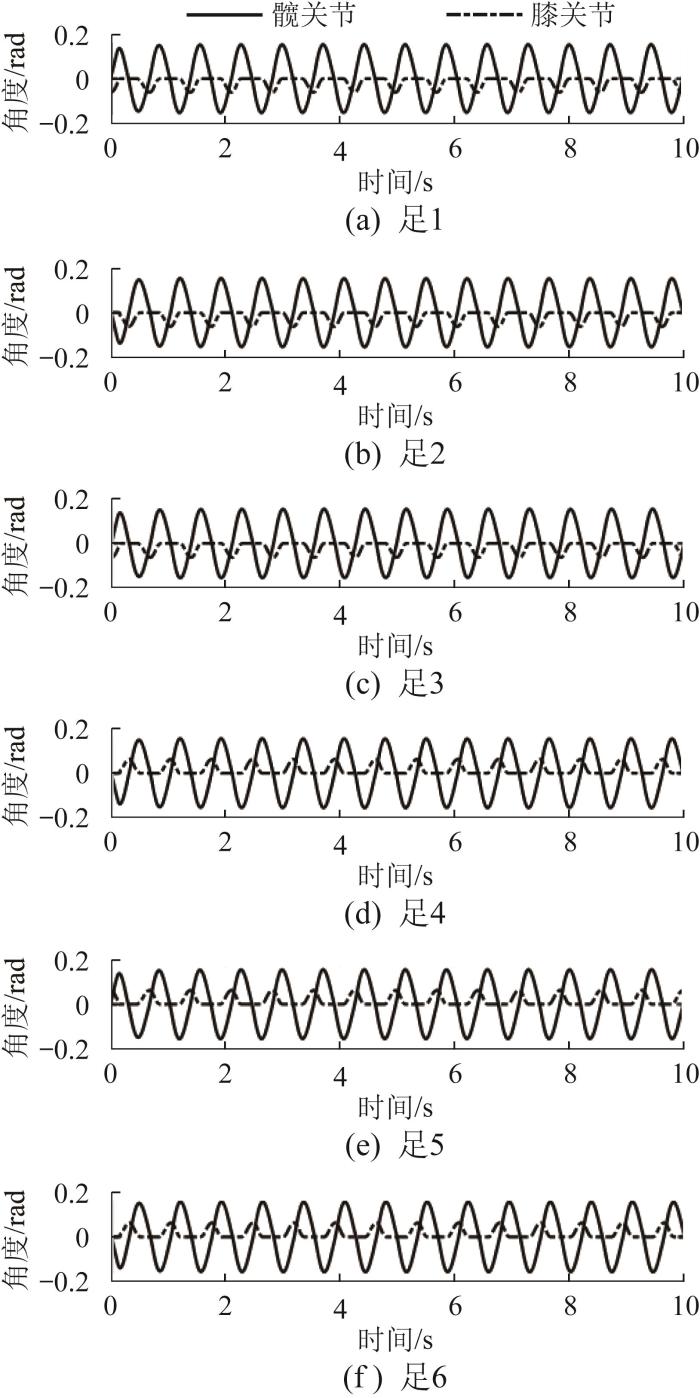
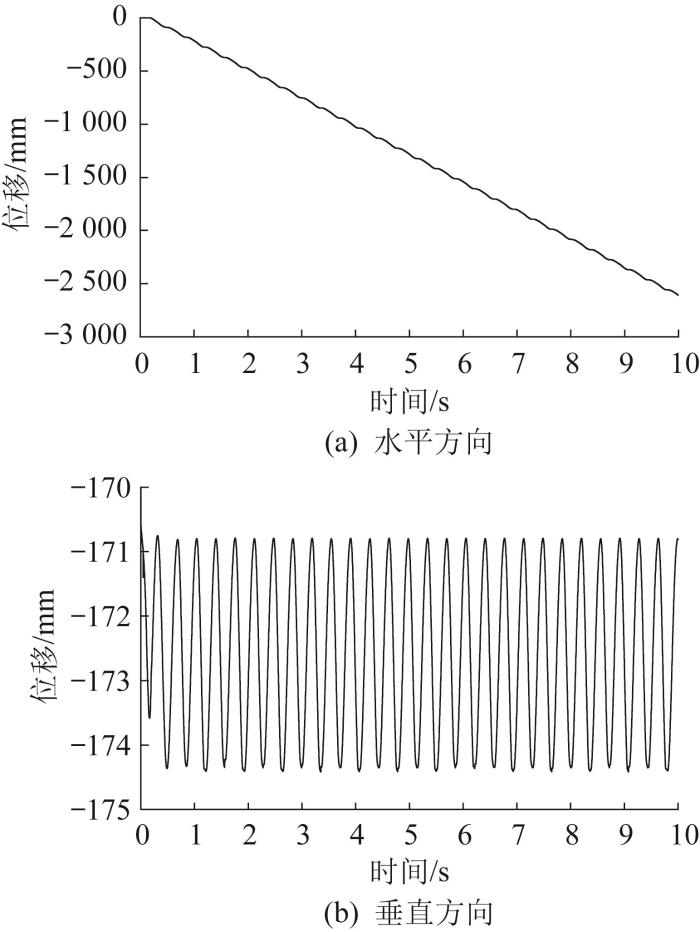
根据求出的优化设计解,再次进行六足机器人运动仿真。机器人节律周期信号如图3 所示,其质心位移变化曲线如图4 所示。
图3
图3
六足机器人节律周期信号
Fig.3
Rhythm cycle signal of hexapod robot
图4
图4
六足机器人质心位移变化曲线
Fig.4
Displacement change curve of center of mass of hexapod robot
由图3 可知:六足机器人的节律周期信号稳定且连续,并且6个运动足的信号之间具有相互对应的相位关系。可见采用CPG模型能有效控制六足机器人稳定行走。
由图4 可知:在10 s内六足机器人沿水平方向匀速前进,其平均速度为0.269 m/s,移动了2 609 mm;其质心振动非常平稳,振幅为3.6 mm,与目标函数响应值的相对误差为2.5%,小于10%。
通过分析表明,所构建的近似模型具有较高的精度,且各项设定的指标值均满足约束条件的阈值,满足了六足机器人运动稳定性优化设计的要求。
5 结 论
1)本文建立了六足机器人数值模型、运动控制模型,并搭建了机器人仿真模型。通过CPG模型的节律周期信号响应来控制机器人腿部关节的旋转,探究六足机器人的运动稳定性。
2)针对CPG模型中不确定性参数对六足机器人运动姿态的影响,本文提出了六足机器人运动稳定性优化设计方法。采用KKT最优化条件和最大熵原理,将三层优化设计问题转化成单层优化设计问题;同时,结合RBF建立近似模型,并运用遗传算法求解出最优设计解,极大地提高了求解效率。通过分析表明,该方法能有效求解六足机器人的最佳设计参数,提高机器人的运动稳定性,因此在机器人运动控制领域具有较高的应用价值。
参考文献
View Option
[13]
CAO H NIU S J WANG Y et al Structural design and simulation of assistant leg based on ADAMS
[J]. Chinese Journal of Engineering Design , 2009 , 16 (5 ): 340 -343 .
[本文引用: 1]
[14]
王丹 , 赵强 , 尹伟萌 仿生可重构式机器人移动平台机构及动态特性分析
[J]. 机械设计 , 2018 , 35 (11 ): 61 -67 .
[本文引用: 1]
WANG D ZHAO Q YIN W M Mechanism and dynamic analysis on mobile platform of bionic reconfigurable robot
[J]. Journal of Machine Design , 2018 , 35 (11 ): 61 -67 .
[本文引用: 1]
[15]
李满宏 , 张明路 , 张建华 , 等 六足机器人关键技术综述
[J]. 机械设计 , 2015 , 32 (10 ): 1 -8 .
[本文引用: 1]
LI M H ZHANG M L ZHANG J H et al Review on key technology of the hexapod robot
[J]. Journal of Machine Design , 2015 , 32 (10 ): 1 -8 .
[本文引用: 1]
[16]
戚景观 , 齐向东 , 王兴 CMAC在三关节机械臂逆运动学求解中的应用研究
[J]. 工程设计学报 , 2012 , 19 (3 ): 203 -207 .
[本文引用: 1]
QI J G QI X D WANG X The application research of CMAC in the inverse kinematics solution of three joint mechanical arms
[J]. Chinese Journal of Engineering Design , 2012 , 19 (3 ): 203 -207 .
[本文引用: 1]
[17]
郑浩峻 , 张秀丽 , 关旭 , 等 基于生物中枢模式发生器原理的四足机器人
[J]. 清华大学学报(自然科学版) , 2004 , 44 (2 ): 166 -169 .
[本文引用: 1]
ZHENG H J ZHANG X L GUAN X et al Quadruped robot based on biological central pattern generator
[J]. Journal of Tsinghua University (Science and Technology) , 2004 , 44 (2 ): 166 -169 .
[本文引用: 1]
[18]
李天睿 基于概率-区间混合模型的多目标可靠性优化设计方法研究
[D]. 长沙 : 长沙理工大学 , 2022 .
[本文引用: 1]
LI T R Research on multi-objective reliability optimization design method based on probability-interval mixed model
[D]. Changsha : Changsha University of Science & Technology , 2022 .
[本文引用: 1]
[19]
LIU X WANG X Y SUN L et al An efficient multi-objective optimization method for uncertain structures based on ellipsoidal convex model
[J]. Structural and Multidisciplinary Optimization , 2019 , 59 (6 ): 2189 -2203 .
[本文引用: 1]
[1]
[本文引用: 1]
ZHANG X J WU Y Q LIU H X et al Design and analy-sis of wheel-footed magnetic adsorption wall-climbing robot with passing obstacles capability
[J]. Journal of Mechanical Engineering , 2024 , 60 (1 ): 248 -261 .
DOI:10.3901/jme.2024.01.248
[本文引用: 1]
[20]
张远洋 基于概率-区间混合模型的可靠性优化设计方法
[D]. 长沙 : 长沙理工大学 , 2020 .
[本文引用: 1]
ZHANG Y Y Reliability optimization design method based on probability-interval mixed model
[D]. Changsha : Changsha University of Science & Technology , 2020 .
[本文引用: 1]
[21]
XU J DANG C KONG F Efficient reliability analysis of structures with the rotational quasi-symmetric point- and the maximum entropy methods
[J]. Mechanical Systems and Signal Processing , 2017 , 95 : 58 -76 .
[本文引用: 1]
[22]
郑鹏 , 刘健 , 宋维 , 等 拉丁超立方抽样评估方法改进研究
[J]. 核电子学与探测技术 , 2017 , 37 (7 ): 734 -738 .
[本文引用: 1]
ZHENG P LIU J SONG W et al Preliminary study on improved Latin hypercube sampling
[J]. Nuclear Electronics & Detection Technology , 2017 , 37 (7 ): 734 -738 .
[本文引用: 1]
[23]
LIU X LIU X ZHOU Z H et al An efficient multi-objective optimization method based on the adaptive approximation model of the radial basis function
[J]. Structural and Multidisciplinary Optimization , 2021 , 63 (3 ): 1385 -1403 .
[本文引用: 1]
[2]
惠记庄 , 魏芳胜 , 高凯 , 等 基于ADAMS的冗余驱动并联机器人动力学仿真研究
[J]. 工程设计学报 , 2012 , 19 (5 ): 362 -365 .
[本文引用: 1]
HUI J Z WEI F S GAO K et al Study on dynamics simulation of redundantly actuated parallel robot based on ADAMS
[J]. Chinese Journal of Engineering Design , 2012 , 19 (5 ): 362 -365 .
[本文引用: 1]
[3]
丁杨 , 张明路 , 焦鑫 , 等 关节电机驱动六足机器人仿生结构设计与柔顺运动控制
[J]. 工程设计学报 , 2023 , 30 (2 ): 154 -163 .
[本文引用: 1]
DING Y ZHANG M L JIAO X et al Biomimetic structure design and compliant motion control for hexapod robot driven by joint motors
[J]. Chinese Journal of Engineering Design , 2023 , 30 (2 ): 154 -163 .
[本文引用: 1]
[4]
WEI S X WU H B LIU L et al A CPG-based gait planning and motion performance analysis for quadruped robot
[J]. Industrial Robot—The International Journal of Robotics Research and Application , 2022 , 49 (4 ): 779 -797 .
[本文引用: 1]
[5]
ZHANG W GONG Q S YANG H Y et al CPG modulates the omnidirectional motion of a hexapod robot in unstructured terrain
[J]. Journal of Bionic Engineering , 2023 , 20 (2 ): 558 -567 .
[本文引用: 1]
[6]
王健美 , 付成龙 , 黄元林 , 等 基于CPG的仿人机器人运动控制方法及研究进展
[J]. 机械设计与制造 , 2009 (9 ): 1 -3 .
[本文引用: 1]
WANG J M FU C L HUANG Y L et al CPG-Based locomotion control on biped robot and its development
[J]. Machinery Design & Manufacture , 2009 (9 ): 1 -3 .
[本文引用: 1]
[7]
ZHANG Y N CUI R X LI H Q et al CPG-fuzzy heading control for a hexapod robot with arc-shaped blade legs
[J]. Journal of Intelligent & Robotic Systems , 2024 , 110 (1 ): 12 .
[本文引用: 1]
[8]
张春燕 , 丁兵 , 何志强 , 等 转盘式多足仿生机器人的运动学分析及优化
[J]. 工程设计学报 , 2022 , 29 (3 ): 327 -338 .
[本文引用: 1]
ZHANG C Y DING B HE Z Q et al Kinematics analysis and optimization of rotary multi-legged bionic robot
[J]. Chinese Journal of Engineering Design , 2022 , 29 (3 ): 327 -338 .
[本文引用: 1]
[9]
[本文引用: 1]
LIU X HE Z B ZHOU Z H et al Hybrid reliability approach for airbag seat protection performance based on probability and probability box models
[J]. Journal of Mechanical Engineering , 2022 , 58 (24 ): 324 -333 .
DOI:10.3901/jme.2022.24.324
[本文引用: 1]
[10]
刘鑫 , 陈德 , 周振华 , 等 基于概率-区间混合模型的汽车乘员约束系统可靠性优化设计
[J]. 振动与冲击 , 2021 , 40 (20 ): 240 -246 .
[本文引用: 1]
LIU X CHEN D ZHOU Z H et al Reliability-based design optimization for an occupant restraint system based on a probability and interval hybrid model
[J]. Journal of Vibration and Shock , 2021 , 40 (20 ): 240 -246 .
[本文引用: 1]
[11]
ZAEIMI M GHODDOSIAN A System RBDO of truss structures considering interval distribution parameters
[J]. Structural Engineering and Mechanics , 2019 , 70 (1 ): 81 -96 .
[本文引用: 1]
[12]
JIANG C LU G Y HAN X et al A new reliability analysis method for uncertain structures with random and interval variables
[J]. International Journal of Mechanics and Materials in Design , 2012 , 8 (2 ): 169 -182 .
[本文引用: 1]
[13]
曹恒 , 牛思捷 , 王瑜 , 等 基于ADAMS的助力机械腿结构设计与仿真
[J]. 工程设计学报 , 2009 , 16 (5 ): 340 -343 .
[本文引用: 1]
基于ADAMS的助力机械腿结构设计与仿真
1
2009
... 在六足机器人姿态控制过程中,机器人利用腿部关节的旋转来调整自身的运动姿态,并保持运动稳定性[13 ] .作者利用工业建模软件构建了六足机器人的数值模型和运动仿真环境[14 ] ,为机器人的姿态控制研究提供依据.六足机器人的结构模型如图1 所示.其主要由机器人躯体、运动足以及腿部旋转关节等部件构成[15 ] ,其中:机器人躯体与6个运动足按六边形的形式相互连接;腿部关节采用内膝肘式配置方式,腿部关节之间连杆的长度分别为L 1 、L 2 、L 3 和L 4 .其结构参数如表1 所示. ...
仿生可重构式机器人移动平台机构及动态特性分析
1
2018
... 在六足机器人姿态控制过程中,机器人利用腿部关节的旋转来调整自身的运动姿态,并保持运动稳定性[13 ] .作者利用工业建模软件构建了六足机器人的数值模型和运动仿真环境[14 ] ,为机器人的姿态控制研究提供依据.六足机器人的结构模型如图1 所示.其主要由机器人躯体、运动足以及腿部旋转关节等部件构成[15 ] ,其中:机器人躯体与6个运动足按六边形的形式相互连接;腿部关节采用内膝肘式配置方式,腿部关节之间连杆的长度分别为L 1 、L 2 、L 3 和L 4 .其结构参数如表1 所示. ...
仿生可重构式机器人移动平台机构及动态特性分析
1
2018
... 在六足机器人姿态控制过程中,机器人利用腿部关节的旋转来调整自身的运动姿态,并保持运动稳定性[13 ] .作者利用工业建模软件构建了六足机器人的数值模型和运动仿真环境[14 ] ,为机器人的姿态控制研究提供依据.六足机器人的结构模型如图1 所示.其主要由机器人躯体、运动足以及腿部旋转关节等部件构成[15 ] ,其中:机器人躯体与6个运动足按六边形的形式相互连接;腿部关节采用内膝肘式配置方式,腿部关节之间连杆的长度分别为L 1 、L 2 、L 3 和L 4 .其结构参数如表1 所示. ...
六足机器人关键技术综述
1
2015
... 在六足机器人姿态控制过程中,机器人利用腿部关节的旋转来调整自身的运动姿态,并保持运动稳定性[13 ] .作者利用工业建模软件构建了六足机器人的数值模型和运动仿真环境[14 ] ,为机器人的姿态控制研究提供依据.六足机器人的结构模型如图1 所示.其主要由机器人躯体、运动足以及腿部旋转关节等部件构成[15 ] ,其中:机器人躯体与6个运动足按六边形的形式相互连接;腿部关节采用内膝肘式配置方式,腿部关节之间连杆的长度分别为L 1 、L 2 、L 3 和L 4 .其结构参数如表1 所示. ...
六足机器人关键技术综述
1
2015
... 在六足机器人姿态控制过程中,机器人利用腿部关节的旋转来调整自身的运动姿态,并保持运动稳定性[13 ] .作者利用工业建模软件构建了六足机器人的数值模型和运动仿真环境[14 ] ,为机器人的姿态控制研究提供依据.六足机器人的结构模型如图1 所示.其主要由机器人躯体、运动足以及腿部旋转关节等部件构成[15 ] ,其中:机器人躯体与6个运动足按六边形的形式相互连接;腿部关节采用内膝肘式配置方式,腿部关节之间连杆的长度分别为L 1 、L 2 、L 3 和L 4 .其结构参数如表1 所示. ...
CMAC在三关节机械臂逆运动学求解中的应用研究
1
2012
... 在传统的六足机器人姿态控制研究中,通常对机器人腿部结构进行建模,并采用逆运动学方法计算其腿部关节的旋转角度[16 ] .采用传统的方法控制六足机器人的运动稳定性存在着不少问题,如机器人建模的复杂性问题、逆运动学求解的不唯一性问题以及在复杂多变的工况下六足机器人的6个运动足与腿部旋转关节之间的协调性问题. ...
CMAC在三关节机械臂逆运动学求解中的应用研究
1
2012
... 在传统的六足机器人姿态控制研究中,通常对机器人腿部结构进行建模,并采用逆运动学方法计算其腿部关节的旋转角度[16 ] .采用传统的方法控制六足机器人的运动稳定性存在着不少问题,如机器人建模的复杂性问题、逆运动学求解的不唯一性问题以及在复杂多变的工况下六足机器人的6个运动足与腿部旋转关节之间的协调性问题. ...
基于生物中枢模式发生器原理的四足机器人
1
2004
... 为了提高六足机器人的运动稳定性,本文基于Matsuoka和Kimura模型[17 ] ,构建了一种CPG模型,通过CPG模型的节律周期信号响应来控制六足机器人腿部关节的旋转. ...
基于生物中枢模式发生器原理的四足机器人
1
2004
... 为了提高六足机器人的运动稳定性,本文基于Matsuoka和Kimura模型[17 ] ,构建了一种CPG模型,通过CPG模型的节律周期信号响应来控制六足机器人腿部关节的旋转. ...
基于概率-区间混合模型的多目标可靠性优化设计方法研究
1
2022
... 式(2) 所示的优化数学模型涉及内外层嵌套的可靠性优化[18 ] ,即:在外层,是对六足机器人质心位移可靠性指标求解的单层优化;在内层,由于极限状态功能函数中同时存在概率变量和区间变量,求解可靠性指标是双层优化设计问题.因而,六足机器人运动稳定性优化设计问题是内外三层嵌套的,如果采用传统的优化方法求解,效率低且时间成本较高,无法满足优化设计的要求[19 ] .因此,需要采取一种解耦策略,高效求解六足机器人运动稳定性优化设计问题. ...
基于概率-区间混合模型的多目标可靠性优化设计方法研究
1
2022
... 式(2) 所示的优化数学模型涉及内外层嵌套的可靠性优化[18 ] ,即:在外层,是对六足机器人质心位移可靠性指标求解的单层优化;在内层,由于极限状态功能函数中同时存在概率变量和区间变量,求解可靠性指标是双层优化设计问题.因而,六足机器人运动稳定性优化设计问题是内外三层嵌套的,如果采用传统的优化方法求解,效率低且时间成本较高,无法满足优化设计的要求[19 ] .因此,需要采取一种解耦策略,高效求解六足机器人运动稳定性优化设计问题. ...
An efficient multi-objective optimization method for uncertain structures based on ellipsoidal convex model
1
2019
... 式(2) 所示的优化数学模型涉及内外层嵌套的可靠性优化[18 ] ,即:在外层,是对六足机器人质心位移可靠性指标求解的单层优化;在内层,由于极限状态功能函数中同时存在概率变量和区间变量,求解可靠性指标是双层优化设计问题.因而,六足机器人运动稳定性优化设计问题是内外三层嵌套的,如果采用传统的优化方法求解,效率低且时间成本较高,无法满足优化设计的要求[19 ] .因此,需要采取一种解耦策略,高效求解六足机器人运动稳定性优化设计问题. ...
轮足式磁吸附越障爬壁机器人设计与分析
1
2024
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
轮足式磁吸附越障爬壁机器人设计与分析
1
2024
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
基于概率-区间混合模型的可靠性优化设计方法
1
2020
... 在六足机器人运动稳定性优化设计问题中,β 1 式(3) 求解[20 ] : ...
基于概率-区间混合模型的可靠性优化设计方法
1
2020
... 在六足机器人运动稳定性优化设计问题中,β 1 式(3) 求解[20 ] : ...
Efficient reliability analysis of structures with the rotational quasi-symmetric point- and the maximum entropy methods
1
2017
... 式(6) 中极限状态功能函数g J X , P , u P 和u 都为概率变量,因此本文基于最大熵原理[21 ] ,利用求积分的方法求出式(6) 中极限状态功能函数的最大失效概率p J , f β 1
拉丁超立方抽样评估方法改进研究
1
2017
... 在六足机器人运动稳定性优化设计中,目标函数和极限状态功能函数无法通过显性函数表达式表示出来.由于目标函数和极限状态功能函数具备隐函数特征,本文首先采用拉丁超立方设计(latin hypercube design,LHD)方法[22 ] ,均匀采集初始实验样本点;然后,利用径向基函数(radial basis function, RBF)[23 ] 构建六足机器人运动稳定性优化的近似模型.因此,将六足机器人运动稳定性优化的数学模型转化为: ...
拉丁超立方抽样评估方法改进研究
1
2017
... 在六足机器人运动稳定性优化设计中,目标函数和极限状态功能函数无法通过显性函数表达式表示出来.由于目标函数和极限状态功能函数具备隐函数特征,本文首先采用拉丁超立方设计(latin hypercube design,LHD)方法[22 ] ,均匀采集初始实验样本点;然后,利用径向基函数(radial basis function, RBF)[23 ] 构建六足机器人运动稳定性优化的近似模型.因此,将六足机器人运动稳定性优化的数学模型转化为: ...
An efficient multi-objective optimization method based on the adaptive approximation model of the radial basis function
1
2021
... 在六足机器人运动稳定性优化设计中,目标函数和极限状态功能函数无法通过显性函数表达式表示出来.由于目标函数和极限状态功能函数具备隐函数特征,本文首先采用拉丁超立方设计(latin hypercube design,LHD)方法[22 ] ,均匀采集初始实验样本点;然后,利用径向基函数(radial basis function, RBF)[23 ] 构建六足机器人运动稳定性优化的近似模型.因此,将六足机器人运动稳定性优化的数学模型转化为: ...
基于ADAMS的冗余驱动并联机器人动力学仿真研究
1
2012
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
基于ADAMS的冗余驱动并联机器人动力学仿真研究
1
2012
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
关节电机驱动六足机器人仿生结构设计与柔顺运动控制
1
2023
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
关节电机驱动六足机器人仿生结构设计与柔顺运动控制
1
2023
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
A CPG-based gait planning and motion performance analysis for quadruped robot
1
2022
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
CPG modulates the omnidirectional motion of a hexapod robot in unstructured terrain
1
2023
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
基于CPG的仿人机器人运动控制方法及研究进展
1
2009
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
基于CPG的仿人机器人运动控制方法及研究进展
1
2009
... 在机器人姿态控制过程中,腿部关节的旋转角度直接影响着机器人的运动稳定性与安全性[1 ] .特别在六足机器人具有冗余自由度的情况下,对其腿部关节旋转角度的有效控制成为提升机器人运动稳定性的关键一环[2 ] .六足机器人的腿部连杆之间装有旋转电机,作为机器人的旋转关节[3 ] ,并通过中枢模式发生器(central pattern generator, CPG)模型控制该关节电机的转动[4 -5 ] .因此,CPG模型的可靠性直接影响着六足机器人的运动稳定性与安全性.大量研表明,可靠的CPG模型能够最大限度地提升六足机器人的运动稳定性[6 ] . ...
CPG-fuzzy heading control for a hexapod robot with arc-shaped blade legs
1
2024
... 在现有六足机器人的运动控制中,通常将CPG模型中神经元细胞之间的相互抑制系数、神经元振荡器的适应系数以及CPG模型参数作为确定性参数来考虑,忽略了其不确定性对机器人运动稳定性的影响[7 ] ,导致CPG模型的节律周期信号响应与期望波形之间存在较大差异,致使机器人的控制失效,其运动稳定性难以保障.因此,需要研究一种针对CPG模型不确定性参数的优化设计方法,以提高机器人的运动稳定性,有效控制机器人姿态[8 ] . ...
转盘式多足仿生机器人的运动学分析及优化
1
2022
... 在现有六足机器人的运动控制中,通常将CPG模型中神经元细胞之间的相互抑制系数、神经元振荡器的适应系数以及CPG模型参数作为确定性参数来考虑,忽略了其不确定性对机器人运动稳定性的影响[7 ] ,导致CPG模型的节律周期信号响应与期望波形之间存在较大差异,致使机器人的控制失效,其运动稳定性难以保障.因此,需要研究一种针对CPG模型不确定性参数的优化设计方法,以提高机器人的运动稳定性,有效控制机器人姿态[8 ] . ...
转盘式多足仿生机器人的运动学分析及优化
1
2022
... 在现有六足机器人的运动控制中,通常将CPG模型中神经元细胞之间的相互抑制系数、神经元振荡器的适应系数以及CPG模型参数作为确定性参数来考虑,忽略了其不确定性对机器人运动稳定性的影响[7 ] ,导致CPG模型的节律周期信号响应与期望波形之间存在较大差异,致使机器人的控制失效,其运动稳定性难以保障.因此,需要研究一种针对CPG模型不确定性参数的优化设计方法,以提高机器人的运动稳定性,有效控制机器人姿态[8 ] . ...
基于概率-概率盒混合模型的气囊座椅防护特性可靠性分析方法
1
2022
... 目前,大多数学者在研究不确定性参数对系统可靠性的影响时,倾向于采用概率模型来描述不确定性变量[9 ] ,并形成了相应的优化设计方法.然而,当缺乏足够的不确定性变量的数据样本时,就无法准确地建立相应的概率模型,导致概率模型无法准确地描述不确定性变量的信息[10 ] .而区间模型不需要精确的概率分布[11 ] ,只需要确定其上下限,因此在一定程度上避免了概率模型的局限性.在自由度冗余、控制过程复杂的六足机器人的优化设计中,须考虑多种不同类型的设计参数,以控制机器人的运动稳定性.因此,本文采用概率-区间混合模型来描述六足机器人不确定性变量信息,并对机器人的运动稳定性进行优化设计.基于概率-区间混合模型的六足机器人运动稳定性的优化设计,本质上是一个三层嵌套的优化问题.如果采用传统的优化方法进行求解,则计算效率低下,计算成本较高.此外,计算高维、强非线性的数值模型往往会产生计算量过大和求解失败等问题.因此,本文采用Karush-Kuhn-Tucker(KKT)最优化条件[12 ] 和最大熵原理,提出了一种解耦策略,将三层嵌套的优化设计问题转化为单层嵌套的优化设计问题,以提高求解最优设计问题的效率. ...
基于概率-概率盒混合模型的气囊座椅防护特性可靠性分析方法
1
2022
... 目前,大多数学者在研究不确定性参数对系统可靠性的影响时,倾向于采用概率模型来描述不确定性变量[9 ] ,并形成了相应的优化设计方法.然而,当缺乏足够的不确定性变量的数据样本时,就无法准确地建立相应的概率模型,导致概率模型无法准确地描述不确定性变量的信息[10 ] .而区间模型不需要精确的概率分布[11 ] ,只需要确定其上下限,因此在一定程度上避免了概率模型的局限性.在自由度冗余、控制过程复杂的六足机器人的优化设计中,须考虑多种不同类型的设计参数,以控制机器人的运动稳定性.因此,本文采用概率-区间混合模型来描述六足机器人不确定性变量信息,并对机器人的运动稳定性进行优化设计.基于概率-区间混合模型的六足机器人运动稳定性的优化设计,本质上是一个三层嵌套的优化问题.如果采用传统的优化方法进行求解,则计算效率低下,计算成本较高.此外,计算高维、强非线性的数值模型往往会产生计算量过大和求解失败等问题.因此,本文采用Karush-Kuhn-Tucker(KKT)最优化条件[12 ] 和最大熵原理,提出了一种解耦策略,将三层嵌套的优化设计问题转化为单层嵌套的优化设计问题,以提高求解最优设计问题的效率. ...
基于概率-区间混合模型的汽车乘员约束系统可靠性优化设计
1
2021
... 目前,大多数学者在研究不确定性参数对系统可靠性的影响时,倾向于采用概率模型来描述不确定性变量[9 ] ,并形成了相应的优化设计方法.然而,当缺乏足够的不确定性变量的数据样本时,就无法准确地建立相应的概率模型,导致概率模型无法准确地描述不确定性变量的信息[10 ] .而区间模型不需要精确的概率分布[11 ] ,只需要确定其上下限,因此在一定程度上避免了概率模型的局限性.在自由度冗余、控制过程复杂的六足机器人的优化设计中,须考虑多种不同类型的设计参数,以控制机器人的运动稳定性.因此,本文采用概率-区间混合模型来描述六足机器人不确定性变量信息,并对机器人的运动稳定性进行优化设计.基于概率-区间混合模型的六足机器人运动稳定性的优化设计,本质上是一个三层嵌套的优化问题.如果采用传统的优化方法进行求解,则计算效率低下,计算成本较高.此外,计算高维、强非线性的数值模型往往会产生计算量过大和求解失败等问题.因此,本文采用Karush-Kuhn-Tucker(KKT)最优化条件[12 ] 和最大熵原理,提出了一种解耦策略,将三层嵌套的优化设计问题转化为单层嵌套的优化设计问题,以提高求解最优设计问题的效率. ...
基于概率-区间混合模型的汽车乘员约束系统可靠性优化设计
1
2021
... 目前,大多数学者在研究不确定性参数对系统可靠性的影响时,倾向于采用概率模型来描述不确定性变量[9 ] ,并形成了相应的优化设计方法.然而,当缺乏足够的不确定性变量的数据样本时,就无法准确地建立相应的概率模型,导致概率模型无法准确地描述不确定性变量的信息[10 ] .而区间模型不需要精确的概率分布[11 ] ,只需要确定其上下限,因此在一定程度上避免了概率模型的局限性.在自由度冗余、控制过程复杂的六足机器人的优化设计中,须考虑多种不同类型的设计参数,以控制机器人的运动稳定性.因此,本文采用概率-区间混合模型来描述六足机器人不确定性变量信息,并对机器人的运动稳定性进行优化设计.基于概率-区间混合模型的六足机器人运动稳定性的优化设计,本质上是一个三层嵌套的优化问题.如果采用传统的优化方法进行求解,则计算效率低下,计算成本较高.此外,计算高维、强非线性的数值模型往往会产生计算量过大和求解失败等问题.因此,本文采用Karush-Kuhn-Tucker(KKT)最优化条件[12 ] 和最大熵原理,提出了一种解耦策略,将三层嵌套的优化设计问题转化为单层嵌套的优化设计问题,以提高求解最优设计问题的效率. ...
System RBDO of truss structures considering interval distribution parameters
1
2019
... 目前,大多数学者在研究不确定性参数对系统可靠性的影响时,倾向于采用概率模型来描述不确定性变量[9 ] ,并形成了相应的优化设计方法.然而,当缺乏足够的不确定性变量的数据样本时,就无法准确地建立相应的概率模型,导致概率模型无法准确地描述不确定性变量的信息[10 ] .而区间模型不需要精确的概率分布[11 ] ,只需要确定其上下限,因此在一定程度上避免了概率模型的局限性.在自由度冗余、控制过程复杂的六足机器人的优化设计中,须考虑多种不同类型的设计参数,以控制机器人的运动稳定性.因此,本文采用概率-区间混合模型来描述六足机器人不确定性变量信息,并对机器人的运动稳定性进行优化设计.基于概率-区间混合模型的六足机器人运动稳定性的优化设计,本质上是一个三层嵌套的优化问题.如果采用传统的优化方法进行求解,则计算效率低下,计算成本较高.此外,计算高维、强非线性的数值模型往往会产生计算量过大和求解失败等问题.因此,本文采用Karush-Kuhn-Tucker(KKT)最优化条件[12 ] 和最大熵原理,提出了一种解耦策略,将三层嵌套的优化设计问题转化为单层嵌套的优化设计问题,以提高求解最优设计问题的效率. ...
A new reliability analysis method for uncertain structures with random and interval variables
1
2012
... 目前,大多数学者在研究不确定性参数对系统可靠性的影响时,倾向于采用概率模型来描述不确定性变量[9 ] ,并形成了相应的优化设计方法.然而,当缺乏足够的不确定性变量的数据样本时,就无法准确地建立相应的概率模型,导致概率模型无法准确地描述不确定性变量的信息[10 ] .而区间模型不需要精确的概率分布[11 ] ,只需要确定其上下限,因此在一定程度上避免了概率模型的局限性.在自由度冗余、控制过程复杂的六足机器人的优化设计中,须考虑多种不同类型的设计参数,以控制机器人的运动稳定性.因此,本文采用概率-区间混合模型来描述六足机器人不确定性变量信息,并对机器人的运动稳定性进行优化设计.基于概率-区间混合模型的六足机器人运动稳定性的优化设计,本质上是一个三层嵌套的优化问题.如果采用传统的优化方法进行求解,则计算效率低下,计算成本较高.此外,计算高维、强非线性的数值模型往往会产生计算量过大和求解失败等问题.因此,本文采用Karush-Kuhn-Tucker(KKT)最优化条件[12 ] 和最大熵原理,提出了一种解耦策略,将三层嵌套的优化设计问题转化为单层嵌套的优化设计问题,以提高求解最优设计问题的效率. ...
基于ADAMS的助力机械腿结构设计与仿真
1
2009
... 在六足机器人姿态控制过程中,机器人利用腿部关节的旋转来调整自身的运动姿态,并保持运动稳定性[13 ] .作者利用工业建模软件构建了六足机器人的数值模型和运动仿真环境[14 ] ,为机器人的姿态控制研究提供依据.六足机器人的结构模型如图1 所示.其主要由机器人躯体、运动足以及腿部旋转关节等部件构成[15 ] ,其中:机器人躯体与6个运动足按六边形的形式相互连接;腿部关节采用内膝肘式配置方式,腿部关节之间连杆的长度分别为L 1 、L 2 、L 3 和L 4 .其结构参数如表1 所示. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}