基于概率-区间混合模型的六足机器人运动稳定性优化设计方法
Optimization design method for kinematic stability of hexapod robot based on probability-interval hybrid model
基于概率-区间混合模型的六足机器人运动稳定性优化设计方法 |
| 刘鑫,李飞虎 |
|
Optimization design method for kinematic stability of hexapod robot based on probability-interval hybrid model |
| Xin LIU,Feihu LI |
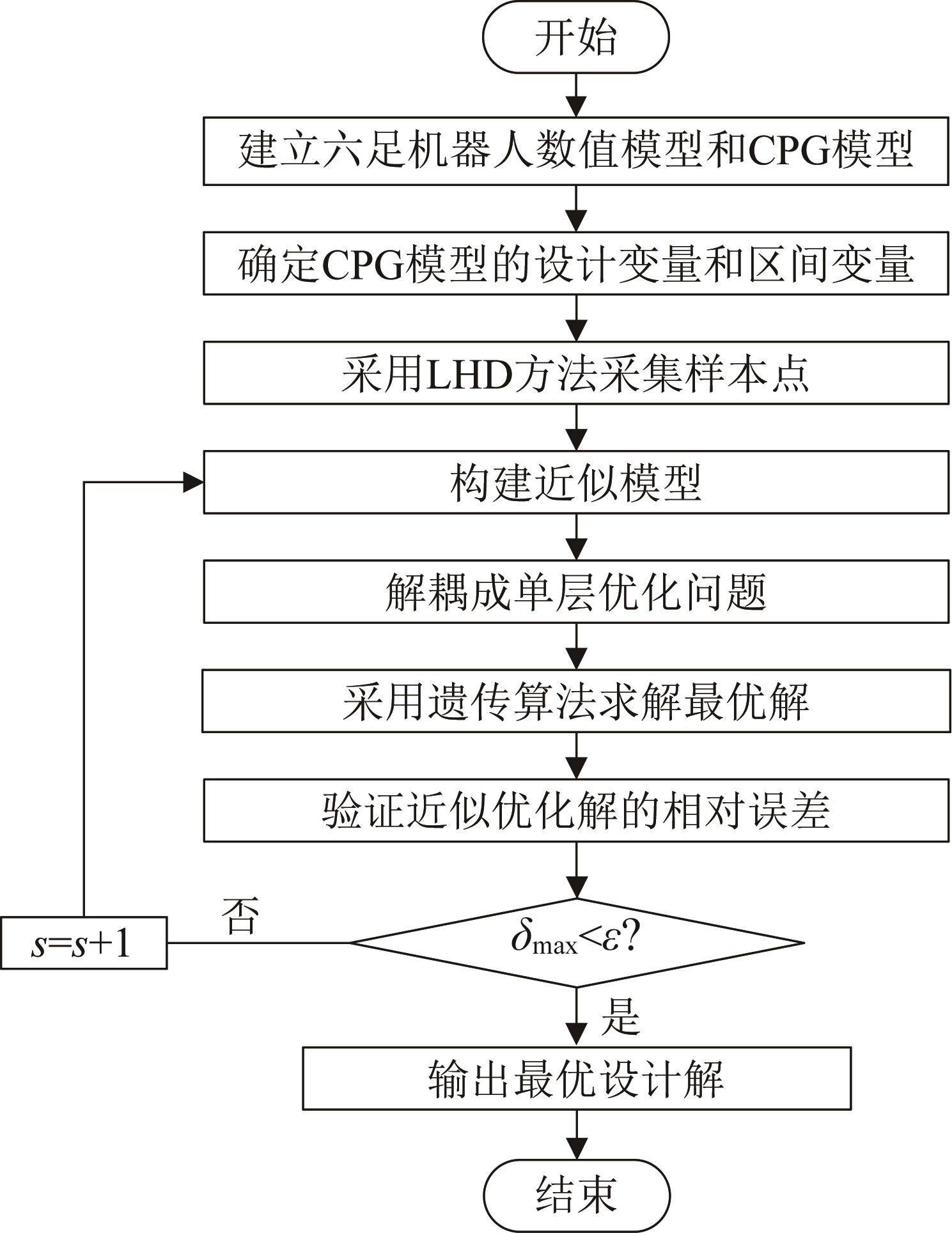
| 图2 六足机器人运动稳定性优化设计方法 |
| Fig.2 Optimization design method for kinematic stability of hexapod robot |
|
|