本文链接 :https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.219
悬臂式掘进机在煤矿掘进工作面建设中占据重要地位[1 ] ,尤其在硬岩掘进方面具有独特优势。在用于煤矿巷道成形时,需要控制悬臂式掘进机的机身和截割臂以实现多自由运动,从而获得矩形、拱形、梯形等不同截面的巷道。目前,悬臂式掘进机的智能化程度较低,主要依靠操作人员手动控制。由于煤矿井下的低照度、高粉尘环境,操作人员的视线易受粉尘干扰,从而无法准确判断掘进机机身位置,导致在自动截割前机身偏离巷道规划中心线,极易造成截割面超挖、欠挖以及潜在的安全隐患[2 ] 。悬臂式掘进机机身的轨迹跟踪控制是实现煤矿巷道智能化成形的技术难题。
现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] 。悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] 。在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力。姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪。李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪。Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性。Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效。匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度。王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点。上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] 。为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性。韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果。然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求。
考虑到滑模控制具有对参数变化不敏感、对外部干扰具有高鲁棒性以及响应迅速等优点[18 ] ,本文提出了一种基于新型趋近律的改进滑模控制方法,用于悬臂式掘进机的轨迹跟踪和纠偏控制。通过在传统指数趋近律中引入掘进机机身的横向偏差与航向角偏差以及增加幂次趋近项的方式,设计了新型趋近律,并采用边界层法解决符号函数乘积项所引起的抖振问题,从而在加快轨迹偏差收敛速度的同时削弱抖振。最后,对新型趋近律进行理论分析,并通过控制仿真和轨迹跟踪实验来验证改进滑模控制方法的轨迹跟踪效果。
1 悬臂式掘进机轨迹跟踪问题描述
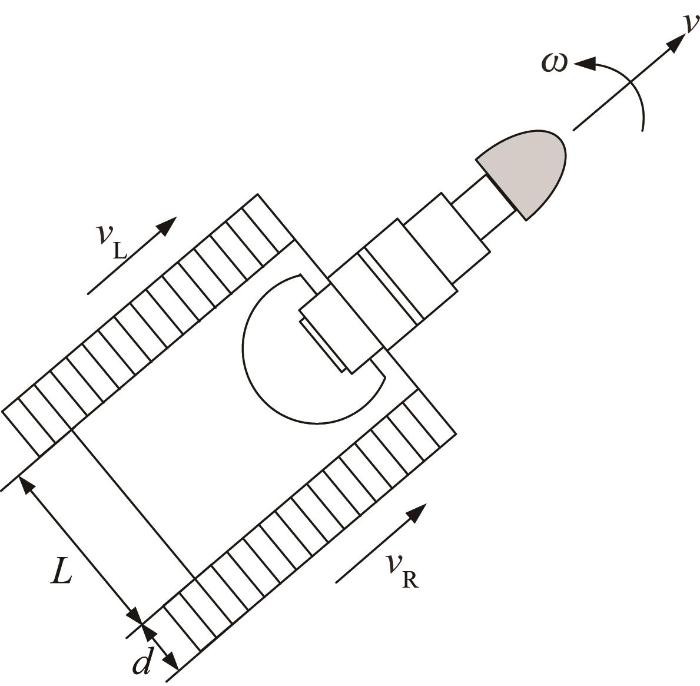
悬臂式掘进机为典型的履带式移动机器人,其行走装置由液压马达驱动的左右2条履带构成,依靠差速运动来实现机身的直行和转弯。悬臂式掘进机的几何模型如图1 所示。图中:v ω v L 为左侧履带的运行速度,v R 为右侧履带的运行速度,L d
图1
图1
悬臂式掘进机几何模型
Fig.1
Geometric model of boom-type roadheader
根据图1 ,悬臂式掘进机机身速度与左右两侧履带运行速度之间的关系可表示为:
( v , ω ) T = C - 1 ( v L , v R ) T
C = 1 - L + d 4 1 L + d 4
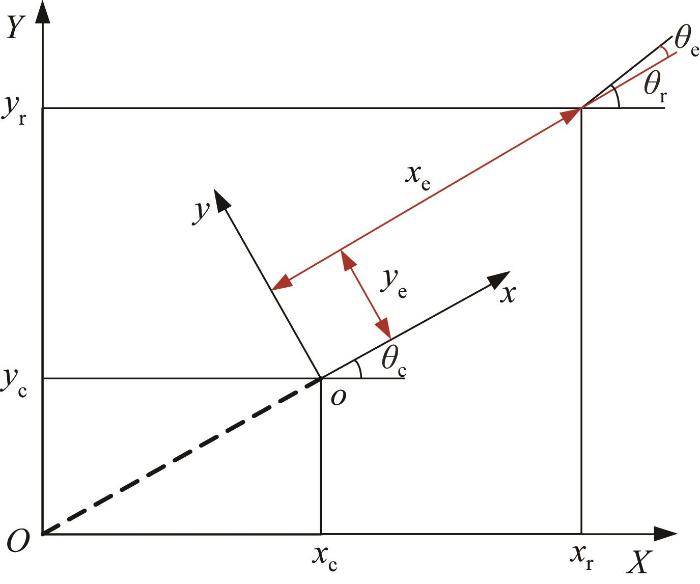
悬臂式掘进机的轨迹跟踪偏差模型如图2 所示。图中:O -XY 为全局坐标系,掘进机在坐标系O -XY 下的位姿可由向量p c = ( x c , y c , θ c ) T q c = ( v c , ω c ) T ( x c , y c ) O -XY 下的位置坐标,θ c X 轴的夹角,规定当掘进机逆时针转向X 轴时,θ c > 0 ° O -XY 下的期望位姿由向量p r = ( x r , y r , θ r ) T q r = ( v r , ω r ) T o -xy 为局部坐标系,其原点o 为掘进机质心,跟随掘进机一起运动。掘进机在坐标系o -xy 下的位姿偏差由向量 e p = ( x e , y e , θ e ) T x e y e θ e o -xy 下掘进机的横向、纵向和航向角偏差。
图2
图2
悬臂式掘进机轨迹跟踪偏差模型
Fig.2
Trajectory tracking deviation model for boom-type roadheader
根据图2 所示的几何关系,可得悬臂式掘进机的运动学模型:
x ˙ c = v c c o s θ c y ˙ c = v c s i n θ c θ ˙ c = ω c
p ˙ c = x ˙ c y ˙ c θ ˙ c = c o s θ c s i n θ c 0 0 0 1 v c ω c
在任意给定的初始误差下,悬臂式掘进机从当前位姿p c = ( x c , y c , θ c ) T p r = ( x r , y r , θ r ) T E p = p r - p c T e 可将全局坐标系下的位姿偏差 E p 转换为局部坐标系下的位姿偏差 e p ,从而建立局部坐标下的轨迹跟踪位姿偏差模型。位姿偏差变换方程可表示为:
e p = x e y e θ e = T e E p = c o s θ c - s i n θ c 0 s i n θ c c o s θ c 0 0 0 1 x r - x c y r - y c θ r - θ c
对式(4)进行微分,可进一步得到位姿偏差微分方程:
e ˙ p = x ˙ e y ˙ e θ ˙ e = ω c y e - v c + v r c o s θ e - ω c x e + v r s i n θ e ω r - ω c
x ˙ e = ( x ˙ r - x ˙ c ) c o s θ c + ( x r - x c ) ( - s i n θ c ) ω c + ( y ˙ r - y ˙ c ) s i n θ c + ( y r - y c ) ( c o s θ c ) ω c = ω c y e - v c + v r c o s θ e y ˙ e = - ( x ˙ r - x ˙ c ) s i n θ c - ( x r - x c ) ( c o s θ c ) ω c + ( y ˙ r - y ˙ c ) c o s θ c - ( y r - y c ) ( s i n θ c ) ω c = - ω c x e + v r s i n θ e θ ˙ e = θ ˙ r - θ ˙ c = ω r - ω c
通过上述分析可知,悬臂式掘进机的轨迹跟踪问题即为寻找有界输入——机身控制速度 u = ( v , ω ) T e p 均可收敛到0,即l i m t → ∞ ( x e , y e , θ e ) T = 0
2 悬臂式掘进机轨迹跟踪控制器设计
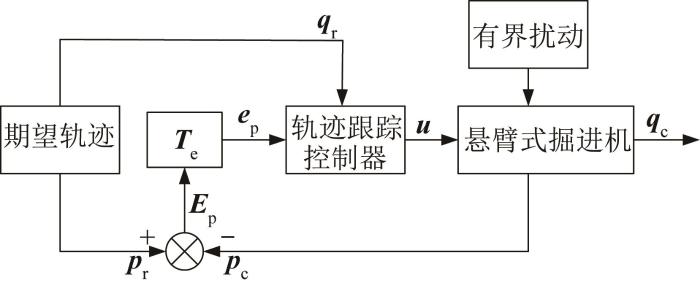
由于悬臂式掘进机机身运动受限,采用2个控制输入来减小3个方向上的跟踪误差;另外,掘进机易受巷道环境等因素干扰,导致其机身轨迹偏离预设路线。滑模控制是一类特殊的非线性控制方法,无须获取被控对象的精确模型,且对外加不确定扰动不敏感,其可根据系统实时状态(如轨迹偏差),以跃变的控制方式迫使系统轨迹按设计好的“滑动模态”运动。为了实现更为有效的轨迹跟踪,本文设计了一种基于改进滑模控制的悬臂式掘进机轨迹跟踪控制器,其控制过程如图3 所示。
图3
图3
悬臂式掘进机轨迹跟踪控制框图
Fig.3
Trajectory tracking control block diagram of boom-type roadheader
悬臂式掘进机轨迹跟踪控制系统的全局输入为期望位姿 p r 和期望速度 q r ,全局输出为掘进机当前时刻的位姿 p c 。首先,基于期望位姿 p r 和当前位姿 p c ,利用式(4)计算得到当前的位姿偏差 e p 。随后,轨迹跟踪控制器基于输入的位姿偏差 e p 和期望速度 q r 实时计算得到掘进机的控制速度u = ( v , ω ) T u q c 。由于掘进机在煤矿井下工作时不可避免地会受到内部与外部的干扰,因此其实际速度 q c 与控制速度 u q c = u
2.1 滑模切换函数设计
反步(back-stepping)法又称反演法,其是一种用于设计不确定非线性系统控制器的系统化方法,可将控制律的设计与Lyapunov理论相结合,从而将复杂的高阶系统拆分为低阶子系统。基于此,本文采用反步法来设计滑模控制的切换函数。
引理1 对于任意x ∈ R x < ∞ ϕ ( x ) = x s i n ( a r c t a n x ) ≥ 0 x = 0 [19 ] 。
根据上述引理,基于反步法设计滑模切换函数,具体步骤如下。
当x e = 0 V y = 1 2 y e 2 θ e = - a r c t a n ( v r y e )
V ˙ y = y e y ˙ e = y e ( - ω x e + v r s i n θ e ) = - ω x e y e - v r y e s i n a r c t a n ( v r y e ) (7)
由引理1可知,v r y e s i n a r c t a n ( v r y e ) ≥ 0 v r y e = 0 V ˙ y ≤ 0 x e θ e - a r c t a n ( v r y e ) y e
根据上述结论,本文改进滑模控制的切换函数可设计为:
s = s 1 s 2 = x e θ e + a r c t a n ( v r y e ) (8)
由Lyapunov稳定性判定可知,所设计的滑模切换函数满足系统稳定的条件。通过设计悬臂式掘进机轨迹跟踪滑模控制器,使得s i → 0 ( i = 1 , 2 ) x e θ e 收敛至- a r c t a n ( v r y e ) y e 收敛至0。由于期望线速度v r 不为0,因此当y e 收敛至0时,θ e 收敛至0,进而可实现悬臂式掘进机在轨迹跟踪过程中的偏差收敛。
2.2 新型趋近律设计
滑模运动可分为趋近过程和滑动模态两个阶段,而趋近过程即为滑模切换函数s → 0 [20 ] 提出了基于趋近律的滑模控制设计方法,有效缩短了趋近过程所需的时间并削弱了系统抖振,极大改善了趋近运动的实时动态性能[21 ] 。指数趋近律是一种典型的趋近律,当系统初始状态远离滑模面(即s
s ˙ = - k 1 s α s g n ( s ) - k 2 x s g n ( s ) - k 3 s (9)
式中:x l i m t → ∞ x = 0 α k 1 、k 2 、k 3 为增益系数,满足0 < α < 1 k 1 >0,k 2 >0,k 3 >0。
新型趋近律在传统指数趋近律的基础上引入了状态变量x s 从初始状态运动至滑模面s = 0 s > 1 s < 1 x 进入滑模面并不断向平衡原点移动,k 2 x s g n ( s )
定理1 系统可在新型趋近律的作用下于有限时间内到达滑模面。
取Lyapunov函数V = 1 / 2 s 2
V ˙ = s s ˙ = s ( - k 1 s α s g n ( s ) - k 2 x s g n ( s ) - k 3 s ) = - ( k 1 s α + 1 + k 2 x s + k 3 s 2 ) ≤ 0 (10)
由式(10)可知,有且仅当s = 0 V ˙ = s s ˙ = 0
2.3 新型趋近律稳态误差界分析
由于煤矿巷道环境复杂,悬臂式掘进机在运行时易受到不确定干扰,从而导致机身轨迹偏离预定路线。在系统存在不确定性以及外加干扰的情况下,新型趋近律能够使系统于有限时间内收敛至平衡原点附近的一个邻域内,将该区域称为稳态误差区间。为了证明上述结论,定义系统出现有界干扰d ( t ) s ˙
s ˙ = - k 1 s α s g n ( s ) - k 2 x s g n ( s ) - k 3 s + d ( t ) (11)
引理2 令x ∈ D ⊂ R n x ˙ = f ( x ) f : R n → R n D V [22 ] :
3)存在实数ε > 0 λ ∈ ( 0,1 ) N ⊂ D V ˙ + ε V λ ≤ 0
则函数x ˙ = f ( x )
定理2 对于存在不确定外界扰动的趋近律,假设d ( t ) ≤ δ δ > 0 s s ˙
s ≤ m i n δ / k 1 1 / α , δ / k 3 (12)
s ˙ ≤ m i n δ , k 1 ( δ / k 3 ) α + m i n k 3 δ / k 1 1 / α , δ + δ (13)
为证明上述定理,取Lyapunov函数V = 1 / 2 s 2
V ˙ = s s ˙ = - k 1 s α + 1 - k 2 x s - k 3 s 2 + s d ( t ) ≤ - k 1 s α + 1 - k 2 x s - k 3 s 2 + d ( t ) s ≤ - k 1 s α + 1 - k 2 x s - k 3 s 2 + δ s (14)
V ˙ + k 2 x s ≤ - k 1 s α + 1 - k 3 s 2 + δ s (15)
V ˙ + 2 k 2 x V 1 / 2 ≤ 0 (16)
由引理2可得,若满足k 1 s α ≥ δ k 3 s ≥ δ 式(16)成立,即系统可在有限时间内收敛,对应区域分别为:
s = ( δ / k 1 ) 1 / α (17)
s = ( δ / k 1 ) 1 / α (18)
s ≤ m i n δ / k 1 1 / α , δ / k 3 (19)
s ˙ = k 1 s α + k 2 x + k 3 s + d ( t ) ≤ k 1 m i n δ / k 1 1 / α , δ / k 3 α + k 2 x + k 3 m i n δ / k 1 1 / α , δ / k 3 + δ = m i n δ , k 1 ( δ / k 3 ) α + k 2 x + m i n k 3 δ / k 1 1 / α , δ + δ (20)
s ˙ ≤ m i n δ , k 1 ( δ / k 3 ) α + m i n k 3 δ / k 1 1 / α , δ + δ
2.4 滑模控制器设计
为进一步减弱系统抖振,采用边界层法,即引入光滑连续的饱和函数s a t ( ⋅ ) s g n ( ⋅ ) ( s )
s a t ( s ) = 1 , k s , - 1 , s > Δ s ≤ Δ s < - Δ (21)
k = 1 Δ
式中:Δ Δ > 0
s ˙ = - k 1 s α s a t ( s ) - k 2 x s a t ( s ) - k 3 s (22)
令ξ = a r c t a n v r y e 式(8)、式(21)和式(22),可得:
s ˙ = s ˙ 1 s ˙ 2 = x ˙ e θ ˙ e + ∂ ξ ∂ v r v ˙ r + ∂ ξ ∂ y e y ˙ e = ω y e - v + v r c o s θ e ω r - ω + ∂ ξ ∂ v r v ˙ r + ∂ ξ ∂ y e ( - ω x e + v r s i n θ e ) = - k 11 s 1 α 1 s a t ( s 1 ) - k 12 x e s a t ( s 1 ) - k 13 s 1 - k 21 s 2 α 2 s a t ( s 2 ) - k 22 θ e s a t ( s 2 ) - k 23 s 2 (23)
对于式(23)中系统状态变量的选取,主要结合滑模切换函数的设计来确定。对于趋近律s ˙ 1 x e s ˙ 2 y e 不受直接控制,航向角偏差θ e 对轨迹偏差的控制精度有显著影响,同时由滑模切换函数可知,若θ e 收敛至0,则y e 必然收敛至0。因此,对于趋近律s ˙ 2 θ e ,当系统状态进入滑动模态后,切换增益随状态变量θ e 的变化而动态调节,可有效抑制切换抖振。
对式(23)进行整理,可得基于新型趋近律的滑模控制律为:
u = v ω = ω y e + v r c o s θ e + k 11 s 1 α 1 s a t ( s 1 ) + k 12 x e s a t ( s 1 ) + k 13 s 1 ω r + ∂ ξ ∂ v r v ˙ r + ∂ ξ ∂ y e ( v r s i n θ e ) + k 21 s 2 α 2 s a t ( s 2 ) + k 22 θ e s a t ( s 2 ) + k 23 s 2 1 + ∂ ξ ∂ y e x e (24)
∂ ξ ∂ v r = y e 1 + ( v r y e ) 2
∂ ξ ∂ y e = v r 1 + ( v r y e ) 2
3 悬臂式掘进机轨迹跟踪仿真分析
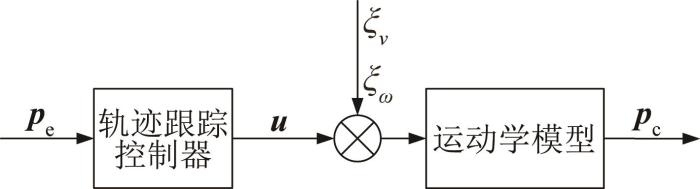
为了验证本文基于新型趋近律的改进滑模控制方法的响应特性和鲁棒性,将改进滑模控制方法与文献[23 ]中基于指数趋近律的传统滑模控制方法进行仿真对比分析。利用MATLAB/Simulink软件开展悬臂式掘进机轨迹跟踪控制仿真,仿真结构如图4 所示。鉴于在任意给定的初始位姿下,起始位置与期望位置之间仅包括直线路径和圆弧路径[24 ] ,故本文将分别针对直线轨迹和圆弧轨迹进行轨迹跟踪仿真分析。
图4
图4
悬臂式掘进机轨迹跟踪仿真结构
Fig.4
Trajectory tracking simulation structure of boom-type roadheader
考虑到悬臂式掘进机在煤矿巷道中行进时会受到各类不确定扰动,例如地质条件变化、履带打滑以及液压驱动系统存在执行误差等,因此在仿真中通过对控制系统的输出量施加不确定干扰来模拟突变工况,从而验证滑模控制方法的鲁棒性。本文改进滑模控制律中增益参数的选取如表1 所示。
3.1 直线轨迹跟踪
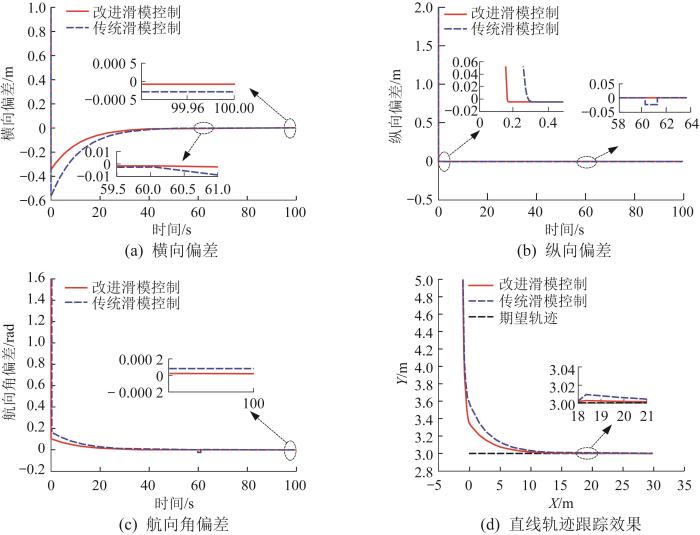
直线轨迹跟踪是轨迹跟踪问题中最基本的跟踪形式之一,通过直线轨迹跟踪仿真可验证控制方法的快速性和稳定性。本文选取的悬臂式掘进机直线期望轨迹为y r = 3 x r = 0.3 t t 为仿真时间)的水平直线。设掘进机的初始位姿为(-1 m,5 m,-π/2),期望线速度v r = 0.3 m / s ω r = 0 r a d / s t =100 s,并在t =60 s处加入扰动幅值不大于2的脉冲干扰。不同滑模控制方法下掘进机的直线轨迹跟踪仿真结果如图5 所示。
图5
图5
悬臂式掘进机直线轨迹跟踪仿真结果对比
Fig.5
Comparison of simulation results of linear trajectory tracking of boom-type roadheader
图5 所示仿真结果表明,悬臂式掘进机在2种滑模控制方法的调控下均能快速跟踪直线期望轨迹。由于本文新型趋近律引入了系统状态变量x e θ e
由图5 (a)可知,2种滑模控制方法均出现了抖振现象,但由于本文新型趋近律在到达滑模面时的趋近速度减慢,而指数趋近律在接近滑模面时仍保持较大的趋近速度,使得系统状态穿越滑模面后仍朝负向运动,故指数趋近律的负向最大偏差值大于本文新型趋近律的,表明新型趋近律降低了系统在接近滑模面时的抖振频率,有效地抑制了抖振。由图5 (a)和图5 (c)可知,当仿真结束时,改进滑模控制下掘进机的横向偏差和航向角偏差较传统滑模控制下的小。此外,从图5 (d)中可以看出,当出现随机干扰时,改进滑模控制下掘进机的轨迹波动幅值小且调整速度更快,进一步验证了改进滑模控制抑制系统抖振的有效性;传统滑模控制下掘进机的轨迹波动幅值虽也较小,但需要行驶较长距离才能使轨迹偏差收敛。相比之下,本文改进滑模控制方法的性能更优,适用于工况环境复杂且存在较多未知干扰的掘进机轨迹跟踪控制。
3.2 圆弧轨迹跟踪
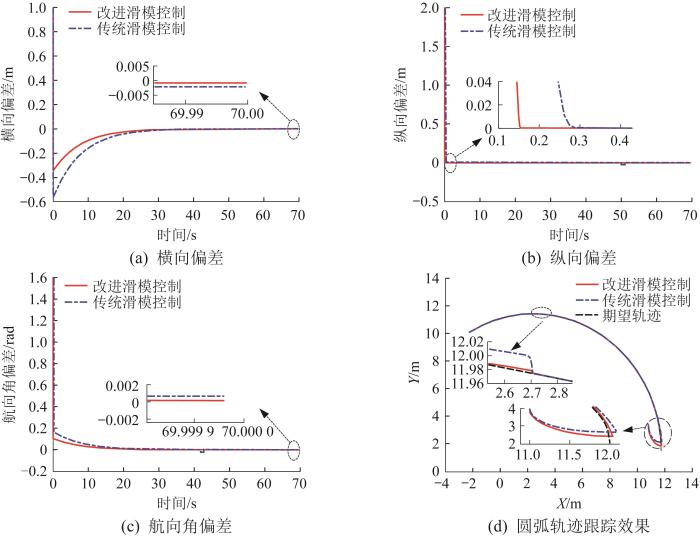
圆弧轨迹跟踪是一种典型的轨迹跟踪方式,可验证掘进机航向角实时变化时控制方法的性能。在本文中,圆弧期望轨迹设置为x r = 2 + 10 c o s 0.03 t y r = 2 + 10 s i n 0.03 t θ r = 0.03 t π v r = 0.3 m / s ω r = 0.03 r a d / s t =70 s,在t =50 s处加入扰动幅值不大于2的脉冲干扰。不同滑模控制方法下掘进机的圆弧轨迹跟踪仿真结果如图6 所示。
图6
图6
悬臂式掘进机圆弧轨迹跟踪仿真结果对比
Fig.6
Comparison of simulation results of circular arc trajectory tracking of boom-type roadheader
由图6 仿真结果可以得出,在初始偏差相同的情况下,2种滑模控制方法均可以实现圆弧轨迹的快速跟踪,但本文改进滑模控制无论是在响应速度还是在抖振抑制方面均表现出较好的控制性能,且能够保持较高的跟踪精度。由图6 (a)可知,改进滑模控制方法需要31.7 s将横向偏差缩小至0.02 m,而在相同初始偏差下,传统滑模控制方法需要37.3 s。此外,图6 (a)所示的横向偏差变化曲线同样验证了改进滑模控制的抖振抑制效果优于传统滑模控制,在改进滑模控制下,最大负向偏差为0.34 m,而在传统滑模控制下,最大负向偏差为0.56 m。由图6 (b)可知,改进滑模控制方法可以更快地将纵向偏差收敛于0 m,且无明显抖振现象。由图6 (c)可知,在相同初始偏差下,改进滑模控制方法将航向角偏差减小至0.02 rad仅需43.8 s,而传统滑模控制方法需要49.5 s。结合图6 (a)和图6 (c)可知,在仿真结束时,改进滑模控制下掘进机的横向偏差以及航向角偏差均小于传统滑模控制下的。从图6 (d)中可以看出,在出现随机干扰时,改进滑模控制下掘进机的轨迹波动幅值较小,进一步验证了该控制方法更具鲁棒性。
4 悬臂式掘进机轨迹跟踪实验研究
4.1 实验平台搭建
为了进一步验证本文改进滑模控制方法的有效性和可行性,采用电机驱动的履带式煤矿救援机器人替代悬臂式掘进机,开展轨迹跟踪实验验证。考虑到掘进机的理想行走轨迹为煤矿巷道的中心线,且通常在掘进作业前由地质部门设定,因此在本文实验中以楼道环境模拟煤矿巷道。轨迹跟踪实验平台由硬件和软件两部分组成。硬件部分由内置DSP控制器的履带式机器人、计算机、MG045捷联惯导、360°棱镜和XI-1001Q数字全站仪等构成,如图7 所示。其中,XI-1001Q数字全站仪的定位精度小于等于0.01 m,MG045捷联惯导的姿态精度小于等于0.01 (º)/h;加速度精度小于等于5 × 10 - 5 g
图7
图7
履带式机器人轨迹跟踪实验平台
Fig.7
Trajectory tracking experimental platform for tracked robot
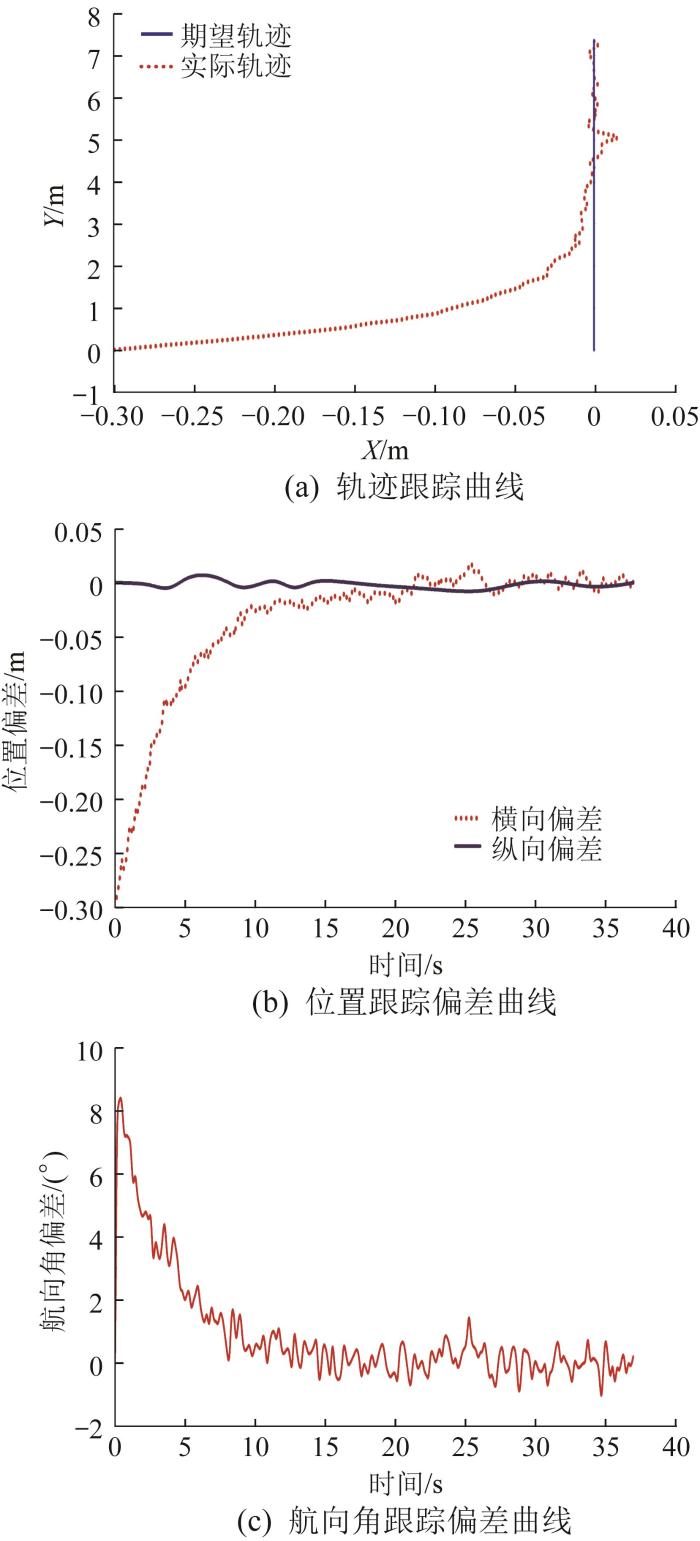
由于大多数情况下巷道中心线都是直线,因此实验以图7 中楼道中线为期望轨迹,设定楼道中线起点为坐标系原点,期望轨迹为Y x c , y c )=(-0.3 m, 0 m),初始航向角θ c =π/2,轨迹跟踪控制参数与表1 中控制参数相同。设置期望轨迹如式(25)所示,实验开始前履带式机器人与期望轨迹间无初始航向角偏差,纵向初始偏差为0 m,仅存在0.3 m的初始横向偏差。
x r = 0 y r = 0.2 t θ r = π 2 (25)
4.2 实验结果与分析
履带式机器人的轨迹跟踪实验结果如图8 所示(为方便表示,此处航向角偏差未换算为弧度制)。从图8 中可以看出,机器人自跟踪开始后,能够迅速调整方向跟踪期望轨迹,在26 s后实际轨迹与期望轨迹基本吻合,轨迹偏差趋于稳定。由图8 (a)可知,在起始位置以及到达期望轨迹的航向角调整阶段,机器人轨迹的曲率变化较为明显,即出现了轻微的抖振现象,其余阶段机器人的轨迹均较为平滑,表明本文改进滑模控制方法对抑制抖振具有一定的效果。从图8 (b)和图8 (c)中可以看出,由于存在初始横向偏差,机器人在运动起始时的转向幅度较大,通过调整航向角实现了对期望轨迹的跟踪。
图8
图8
履带式机器人轨迹跟踪实验结果
Fig.8
Experimental results of trajectory tracking of tracked robot
表2 所示为实验过程中记录的部分机器人位姿偏差。由表2 和图8 (b)可知,在整个轨迹跟踪过程中,机器人未明显超前或落后于期望轨迹,纵向偏差较为稳定,最大偏差保持在0.010 m内;对于横向偏差,自机器人运动开始逐渐缩小至0 m,随后在调整航向角时发生波动,最大偏差为0.018 m,但在26 s后横向偏差基本保持在0 m附近波动。由表2 和图8 (c)可知,除运动起始时机器人的航向角偏差变化较大外,航向角偏差随着机器人运动逐渐收敛于0°附近,稳定运行时航向角偏差小于2°。实验结果表明,本文改进滑模控制方法在轨迹跟踪方面具有良好的控制性能及稳定性,进一步验证了该控制方法的可行性。由于实验条件限制,在煤矿巷道复杂环境下开展验证实验将是后续研究的主要工作。
5 结 论
针对悬臂式掘进机的轨迹跟踪问题,提出了一种基于新型趋近律的改进滑模控制方法,从而提高了掘进机轨迹跟踪过程中的轨迹偏差收敛速度及控制精度。通过理论分析以及仿真和实验验证,得出如下结论:
1)基于悬臂式掘进机的运动学模型分析了其位姿偏差微分方程,提出了基于位姿偏差的轨迹跟踪控制模型;并采用反步法设计了滑模控制切换函数,实现了轨迹跟踪过程中偏差的快速收敛。
2)相较于指数趋近律,所提出的新型趋近律不仅能够缩短趋近过程和削弱系统抖振,而且可进一步提高控制精度,进而提升了滑模控制的性能。同时,针对趋近律中符号函数乘积项所引起的抖振,采用边界层法来进行抑制。
3)考虑到被控系统受不确定性和外部干扰的影响,通过理论分析和控制仿真验证了在出现外部干扰时新型趋近律能够使被控系统在有限时间内收敛至平衡原点。仿真对比结果表明,本文改进滑模控制方法具有较强的鲁棒性,能够控制悬臂式掘进机机身更快地跟踪期望轨迹,且进入稳态后位置偏差小于0.02 m,验证了该控制方法的有效性和稳定性。实验结果表明,改进滑模控制方法能够将履带式机器人的轨迹跟踪误差控制在较小范围内,且能保证机器人稳定运行时的轨迹波动范围满足实际应用要求。
随着煤矿智能化的进一步推进,本文所提出的基于改进滑模控制的轨迹跟踪技术可为实现悬臂式掘进机的自主定向掘进作业提供一定的借鉴。
参考文献
View Option
[1]
王国法 ,刘峰 ,孟祥军 ,等 煤矿智能化(初级阶段)研究与实践
[J].煤炭科学技术 ,2019 ,47 (8 ):1 -36 .
[本文引用: 1]
WANG G F LIU F MENG X J et al Research and practice on intelligent coal mine construction (primary stage)
[J]. Coal Science and Technology , 2019 , 47 (8 ): 1 -36 .
[本文引用: 1]
[2]
雷孟宇 ,张旭辉 ,杨文娟 ,等 煤矿掘进装备视觉位姿检测与控制研究现状与趋势
[J].煤炭学报 ,2021 ,46 ():1135 -1148 .
[本文引用: 1]
LEI M Y ZHANG X H YANG W J et al Current status and trend of research on visual pose detection and control of heading equipment in coal mines
[J]. Journal of China Coal Society , 2021 , 46 (): 1135 -1148 .
[本文引用: 1]
[3]
张旭辉 ,杨文娟 ,薛旭升 ,等 煤矿远程智能掘进面临的挑战与研究进展
[J].煤炭学报 ,2022 ,47 (1 ):579 -597 .
[本文引用: 1]
ZHANG X H YANG W J XUE X S et al Challenges and developing of the intelligent remote control on roadheaders in coal mine
[J]. Journal of China Coal Society , 2022 , 47 (1 ): 579 -597 .
[本文引用: 1]
[4]
杨健健 ,张强 ,王超 ,等 煤矿掘进机的机器人化研究现状与发展
[J].煤炭学报 ,2020 ,45 (8 ):2995 -3005 .
[本文引用: 1]
YANG J J ZHANG Q WANG C et al Status and development of robotization research on roadheader for coal mines
[J]. Journal of China Coal Society , 2020 , 45 (8 ): 2995 -3005 .
[本文引用: 1]
[5]
张旭辉 ,刘永伟 ,毛清华 ,等 煤矿悬臂式掘进机智能控制技术研究及进展
[J].重型机械 ,2018 (2 ):22 -27 .
ZHANG X H LIU Y W MAO Q H et al Research and progress on intelligent control technology of boom-type roadheader in coal mine
[J]. Heavy Machinery , 2018 (2 ): 22 -27 .
[6]
马宏伟 ,王世斌 ,毛清华 ,等 煤矿巷道智能掘进关键共性技术
[J].煤炭学报 ,2021 ,46 (1 ):310 -320 .
[本文引用: 1]
MA H W WANG S B MAO Q H et al Key common technology of intelligent heading in coal mine roadway
[J]. Journal of China Coal Society , 2021 , 46 (1 ): 310 -320 .
[本文引用: 1]
[7]
潘天宇 ,楼佩煌 ,朱立群 ,等 基于Backstepping的改进等速趋近律AGV滑模轨迹跟踪控制方法
[J].计算机集成制造系统 ,2020 ,26 (4 ):930 -938 .
[本文引用: 1]
PAN T Y LOU P H ZHU L Q et al Sliding mode AGV tracking control method based on improve constant speed approaching law and Backstepping
[J]. Computer Integrated Manufacturing Systems , 2020 , 26 (4 ): 930 -938 .
[本文引用: 1]
[8]
姜立标 ,吴中伟 基于趋近律滑模控制的智能车辆轨迹跟踪研究
[J].农业机械学报 ,2018 ,49 (3 ):381 -386 .
[本文引用: 1]
JIANG L B WU Z W Sliding mode control for intelligent vehicle trajectory tracking based on reaching law
[J]. Transactions of the Chinese Society for Agricultural Machinery , 2018 , 49 (3 ): 381 -386 .
[本文引用: 1]
[9]
李昆鹏 ,王孙安 ,郭子龙 一种移动机器人自适应轨迹跟踪控制算法研究
[J].系统仿真学报 ,2008 ,20 (10 ):2575 -2578 ,2583 .
[本文引用: 1]
LI K P WANG S A GUO Z L Adaptive trajectory tracking control method of mobile robot
[J]. Journal of System Simulation , 2008 , 20 (10 ): 2575 -2578 , 2583 .
[本文引用: 1]
[10]
KANAYAMA Y KIMURA Y MIYAZAKI F et al A stable tracking control method for a non-holonomic mobile robot
[C]//Proceedings IROS ' 91: IEEE/RSJ International Workshop on Intelligent Robots and Systems ' 91 . Osaka, Nov. 3-5 , 1991 .
[本文引用: 1]
[11]
SUN S L Designing approach on trajectory-tracking control of mobile robot
[J]. Robotics and Computer-Integrated Manufacturing , 2005 , 21 (1 ): 81 -85 .
[本文引用: 1]
[12]
匡文龙 ,沈文龙 ,姬长英 ,等 农用履带机器人轨迹跟踪控制系统设计与试验
[J].东北农业大学学报 ,2020 ,51 (4 ):78 -87 .
[本文引用: 1]
KUANG W L SHEN W L JI C Y et al Design and experiment of trajectory tracking controller for agricultural tracked robot
[J]. Journal of Northeast Agricultural University , 2020 , 51 (4 ): 78 -87 .
[本文引用: 1]
[13]
[本文引用: 1]
WANG M M ZHU Y Y ZHANG L et al An adaptive robust controller for a mobile robot driven by Mecanum wheels
[J]. Journal of Northwestern Polytechnical University , 2018 , 36 (4 ): 627 -635 .
DOI:10.1051/jnwpu/20183640627
[本文引用: 1]
[14]
张敏骏 ,成荣 ,朱煜 ,等 倾斜巷道掘进机纠偏运动分析与控制研究
[J].煤炭学报 ,2021 ,46 ():549 -557 .
[本文引用: 1]
ZHANG M J CHENG R ZHU Y et al Study on roadheader rectification running performance and control in the in-cline coalmine roadway
[J]. Journal of China Coal Society , 2021 , 46 (): 549 -557 .
[本文引用: 1]
[15]
张旭辉 ,周创 ,张超 ,等 基于视觉测量的快速掘进机器人纠偏控制研究
[J].工矿自动化 ,2020 ,46 (9 ):21 -26 .
[本文引用: 1]
ZHANG X H ZHOU C ZHANG C et al Research on deviation correction control of rapid tunneling robot based on vision measurement
[J]. Journal of Mine Automation , 2020 , 46 (9 ): 21 -26 .
[本文引用: 1]
[16]
QU Y Y YANG T LI T et al Path tracking of underground mining boom roadheader combining BP neural network and state estimation
[J]. Applied Sciences , 2022 , 12 (10 ): 5165 .
[本文引用: 1]
[17]
韩庆珏 ,刘少军 深海履带车的路径跟踪控制算法
[J].中南大学学报(自然科学版) ,2015 ,46 (2 ):472 -478 .
[本文引用: 1]
HAN Q J LIU S J Path tracking control algorithm of the deep sea tracked vehicle
[J]. Journal of Central South University (Science and Technology) , 2015 , 46 (2 ): 472 -478 .
[本文引用: 1]
[18]
刘金琨 ,孙富春 滑模变结构控制理论及其算法研究与进展
[J].控制理论与应用 ,2007 ,24 (3 ):407 -418 .
[本文引用: 1]
LIU J K SUN F C Research and development on theory and algorithms of sliding mode control
[J]. Control Theory & Applications , 2007 , 24 (3 ): 407 -418 .
[本文引用: 1]
[19]
吴卫国 ,陈辉堂 ,王月娟 移动机器人的全局轨迹跟踪控制
[J].自动化学报 ,2001 ,27 (3 ):326 -331 .
[本文引用: 1]
WU W G CHEN H T WANG Y J Global trajectory tracking control of mobile robots
[J]. Acta Automatica Sinica , 2001 , 27 (3 ): 326 -331 .
[本文引用: 1]
[20]
高为炳 变结构控制理论基础 [M].北京 :中国科学技术出版社 ,1990 :95 -101 .
[本文引用: 1]
GAO W B Theoretical basis of variable structure control [M]. Beijing : China Science and Technology Press , 1990 : 95 -101 .
[本文引用: 1]
[21]
南英 ,陈昊翔 ,杨毅 ,等 现代主要控制方法的研究现状及展望
[J].南京航空航天大学学报 ,2015 ,47 (6 ):798 -810 .
[本文引用: 1]
NAN Y , CHEN H X YANG Y et al Primary methodologies of modern control: status and prospect
[J]. Journal of Nanjing University of Aeronautics & Astronautics , 2015 , 47 (6 ): 798 -810 .
[本文引用: 1]
[22]
MARKS G SHTESSEL Y GRATT H et al Effects of high order sliding mode guidance and observers on hit-to-kill interceptions
[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit . San Francisco, Aug . 15 -18 , 2005 .
[本文引用: 1]
[23]
闫茂德 ,贺昱曜 ,吴青云 移动机器人全局轨迹跟踪的自适应滑模控制
[J].微电子学与计算机 ,2006 ,23 (4 ):97 -100 .
[本文引用: 1]
YAN M D HE Y Y WU Q Y Adaptive sliding mode control for the global trajectory tracking of mobile robots
[J]. Microelectronics & Computer , 2006 , 23 (4 ): 97 -100 .
[本文引用: 1]
[24]
REEDS J SHEPP L Optimal paths for a car that goes both forwards and backwards
[J]. Pacific Journal of Mathematics , 1990 , 145 (2 ): 367 -393 .
[本文引用: 1]
煤矿智能化(初级阶段)研究与实践
1
2019
... 悬臂式掘进机在煤矿掘进工作面建设中占据重要地位[1 ] ,尤其在硬岩掘进方面具有独特优势.在用于煤矿巷道成形时,需要控制悬臂式掘进机的机身和截割臂以实现多自由运动,从而获得矩形、拱形、梯形等不同截面的巷道.目前,悬臂式掘进机的智能化程度较低,主要依靠操作人员手动控制.由于煤矿井下的低照度、高粉尘环境,操作人员的视线易受粉尘干扰,从而无法准确判断掘进机机身位置,导致在自动截割前机身偏离巷道规划中心线,极易造成截割面超挖、欠挖以及潜在的安全隐患[2 ] .悬臂式掘进机机身的轨迹跟踪控制是实现煤矿巷道智能化成形的技术难题. ...
煤矿智能化(初级阶段)研究与实践
1
2019
... 悬臂式掘进机在煤矿掘进工作面建设中占据重要地位[1 ] ,尤其在硬岩掘进方面具有独特优势.在用于煤矿巷道成形时,需要控制悬臂式掘进机的机身和截割臂以实现多自由运动,从而获得矩形、拱形、梯形等不同截面的巷道.目前,悬臂式掘进机的智能化程度较低,主要依靠操作人员手动控制.由于煤矿井下的低照度、高粉尘环境,操作人员的视线易受粉尘干扰,从而无法准确判断掘进机机身位置,导致在自动截割前机身偏离巷道规划中心线,极易造成截割面超挖、欠挖以及潜在的安全隐患[2 ] .悬臂式掘进机机身的轨迹跟踪控制是实现煤矿巷道智能化成形的技术难题. ...
煤矿掘进装备视觉位姿检测与控制研究现状与趋势
1
2021
... 悬臂式掘进机在煤矿掘进工作面建设中占据重要地位[1 ] ,尤其在硬岩掘进方面具有独特优势.在用于煤矿巷道成形时,需要控制悬臂式掘进机的机身和截割臂以实现多自由运动,从而获得矩形、拱形、梯形等不同截面的巷道.目前,悬臂式掘进机的智能化程度较低,主要依靠操作人员手动控制.由于煤矿井下的低照度、高粉尘环境,操作人员的视线易受粉尘干扰,从而无法准确判断掘进机机身位置,导致在自动截割前机身偏离巷道规划中心线,极易造成截割面超挖、欠挖以及潜在的安全隐患[2 ] .悬臂式掘进机机身的轨迹跟踪控制是实现煤矿巷道智能化成形的技术难题. ...
煤矿掘进装备视觉位姿检测与控制研究现状与趋势
1
2021
... 悬臂式掘进机在煤矿掘进工作面建设中占据重要地位[1 ] ,尤其在硬岩掘进方面具有独特优势.在用于煤矿巷道成形时,需要控制悬臂式掘进机的机身和截割臂以实现多自由运动,从而获得矩形、拱形、梯形等不同截面的巷道.目前,悬臂式掘进机的智能化程度较低,主要依靠操作人员手动控制.由于煤矿井下的低照度、高粉尘环境,操作人员的视线易受粉尘干扰,从而无法准确判断掘进机机身位置,导致在自动截割前机身偏离巷道规划中心线,极易造成截割面超挖、欠挖以及潜在的安全隐患[2 ] .悬臂式掘进机机身的轨迹跟踪控制是实现煤矿巷道智能化成形的技术难题. ...
煤矿远程智能掘进面临的挑战与研究进展
1
2022
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
煤矿远程智能掘进面临的挑战与研究进展
1
2022
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
煤矿掘进机的机器人化研究现状与发展
1
2020
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
煤矿掘进机的机器人化研究现状与发展
1
2020
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
煤矿悬臂式掘进机智能控制技术研究及进展
0
2018
煤矿悬臂式掘进机智能控制技术研究及进展
0
2018
煤矿巷道智能掘进关键共性技术
1
2021
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
煤矿巷道智能掘进关键共性技术
1
2021
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
基于Backstepping的改进等速趋近律AGV滑模轨迹跟踪控制方法
1
2020
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
基于Backstepping的改进等速趋近律AGV滑模轨迹跟踪控制方法
1
2020
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
基于趋近律滑模控制的智能车辆轨迹跟踪研究
1
2018
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
基于趋近律滑模控制的智能车辆轨迹跟踪研究
1
2018
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
一种移动机器人自适应轨迹跟踪控制算法研究
1
2008
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
一种移动机器人自适应轨迹跟踪控制算法研究
1
2008
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
A stable tracking control method for a non-holonomic mobile robot
1
1991
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
Designing approach on trajectory-tracking control of mobile robot
1
2005
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
农用履带机器人轨迹跟踪控制系统设计与试验
1
2020
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
农用履带机器人轨迹跟踪控制系统设计与试验
1
2020
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
麦克纳姆轮驱动的移动机器人自适应滑模控制器设计
1
2018
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
麦克纳姆轮驱动的移动机器人自适应滑模控制器设计
1
2018
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
倾斜巷道掘进机纠偏运动分析与控制研究
1
2021
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
倾斜巷道掘进机纠偏运动分析与控制研究
1
2021
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
基于视觉测量的快速掘进机器人纠偏控制研究
1
2020
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
基于视觉测量的快速掘进机器人纠偏控制研究
1
2020
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
Path tracking of underground mining boom roadheader combining BP neural network and state estimation
1
2022
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
深海履带车的路径跟踪控制算法
1
2015
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
深海履带车的路径跟踪控制算法
1
2015
... 现阶段,常见的轨迹跟踪算法大多适用于移动机器人、无人驾驶车辆等,而针对悬臂式掘进机的研究主要集中在精确定位、智能截割等方面[3 ] .悬臂式掘进机机身的运动类似于履带式移动机器人[4 -6 ] .在移动机器人轨迹跟踪方面,潘天宇等[7 ] 提出了一种基于改进等速趋近律的滑模轨迹跟踪方法,该方法有效地提高了移动机器人对不同转弯半径的跟踪能力.姜立标等[8 ] 提出了基于趋近律自适应调整的滑模控制轨迹跟踪算法,实现了智能车辆对期望轨迹的快速平稳跟踪.李昆鹏等[9 ] 采用人工场法并引入位姿偏差,实现了轮式移动机器人的自适应轨迹跟踪.Kanayama等[10 ] 提出了一种经典的移动机器人轨迹跟踪控制器,该控制器的结构简单且具有较强的自适应性.Sun等[11 ] 设计了适用于移动机器人的局部渐进稳定控制器,并给出了全局有界的轨迹跟踪控制策略,该控制方法简单且有效.匡文龙等[12 ] 设计了一种结合Lyapunov方法和反演滑模技术的轨迹跟踪控制器,有效提高了农用履带机器人轨迹偏差的收敛速度.王明明等[13 ] 提出了一种基于多幂次趋近律的滑模控制方法,并将其应用于移动机器人的轨迹跟踪,结果表明,该控制方法具有响应快速、鲁棒性强等优点.上述文献主要针对运动环境相对简单的地面移动机器人,但由于煤矿巷道底板地质条件多变,悬臂式掘进机的行走轨迹会受到多种因素干扰,难以保证行驶平稳性,增加了运动控制的难度[14 -15 ] .为解决上述问题,Qu等[16 ] 提出了一种将BP(back propagation,反向传播)神经网络与状态估计相结合的悬臂式掘进机行走轨迹跟踪控制策略,实现了控制律的动态优化并提高了控制算法的鲁棒性.韩庆珏等[17 ] 针对深海履带车,基于路径偏差模型设计了轨迹跟踪控制策略,并通过仿真验证了其控制效果.然而,上述文献大多并未验证外部扰动对轨迹跟踪稳定性的影响,因此并不能完全满足煤矿井下悬臂式掘进机的实际控制需求. ...
滑模变结构控制理论及其算法研究与进展
1
2007
... 考虑到滑模控制具有对参数变化不敏感、对外部干扰具有高鲁棒性以及响应迅速等优点[18 ] ,本文提出了一种基于新型趋近律的改进滑模控制方法,用于悬臂式掘进机的轨迹跟踪和纠偏控制.通过在传统指数趋近律中引入掘进机机身的横向偏差与航向角偏差以及增加幂次趋近项的方式,设计了新型趋近律,并采用边界层法解决符号函数乘积项所引起的抖振问题,从而在加快轨迹偏差收敛速度的同时削弱抖振.最后,对新型趋近律进行理论分析,并通过控制仿真和轨迹跟踪实验来验证改进滑模控制方法的轨迹跟踪效果. ...
滑模变结构控制理论及其算法研究与进展
1
2007
... 考虑到滑模控制具有对参数变化不敏感、对外部干扰具有高鲁棒性以及响应迅速等优点[18 ] ,本文提出了一种基于新型趋近律的改进滑模控制方法,用于悬臂式掘进机的轨迹跟踪和纠偏控制.通过在传统指数趋近律中引入掘进机机身的横向偏差与航向角偏差以及增加幂次趋近项的方式,设计了新型趋近律,并采用边界层法解决符号函数乘积项所引起的抖振问题,从而在加快轨迹偏差收敛速度的同时削弱抖振.最后,对新型趋近律进行理论分析,并通过控制仿真和轨迹跟踪实验来验证改进滑模控制方法的轨迹跟踪效果. ...
移动机器人的全局轨迹跟踪控制
1
2001
... 引理1 对于任意x ∈ R x < ∞ ϕ ( x ) = x s i n ( a r c t a n x ) ≥ 0 x = 0 [19 ] . ...
移动机器人的全局轨迹跟踪控制
1
2001
... 引理1 对于任意x ∈ R x < ∞ ϕ ( x ) = x s i n ( a r c t a n x ) ≥ 0 x = 0 [19 ] . ...
1
1990
... 滑模运动可分为趋近过程和滑动模态两个阶段,而趋近过程即为滑模切换函数s → 0 [20 ] 提出了基于趋近律的滑模控制设计方法,有效缩短了趋近过程所需的时间并削弱了系统抖振,极大改善了趋近运动的实时动态性能[21 ] .指数趋近律是一种典型的趋近律,当系统初始状态远离滑模面(即s
1
1990
... 滑模运动可分为趋近过程和滑动模态两个阶段,而趋近过程即为滑模切换函数s → 0 [20 ] 提出了基于趋近律的滑模控制设计方法,有效缩短了趋近过程所需的时间并削弱了系统抖振,极大改善了趋近运动的实时动态性能[21 ] .指数趋近律是一种典型的趋近律,当系统初始状态远离滑模面(即s
现代主要控制方法的研究现状及展望
1
2015
... 滑模运动可分为趋近过程和滑动模态两个阶段,而趋近过程即为滑模切换函数s → 0 [20 ] 提出了基于趋近律的滑模控制设计方法,有效缩短了趋近过程所需的时间并削弱了系统抖振,极大改善了趋近运动的实时动态性能[21 ] .指数趋近律是一种典型的趋近律,当系统初始状态远离滑模面(即s
现代主要控制方法的研究现状及展望
1
2015
... 滑模运动可分为趋近过程和滑动模态两个阶段,而趋近过程即为滑模切换函数s → 0 [20 ] 提出了基于趋近律的滑模控制设计方法,有效缩短了趋近过程所需的时间并削弱了系统抖振,极大改善了趋近运动的实时动态性能[21 ] .指数趋近律是一种典型的趋近律,当系统初始状态远离滑模面(即s
Effects of high order sliding mode guidance and observers on hit-to-kill interceptions
1
2005
... 引理2 令x ∈ D ⊂ R n x ˙ = f ( x ) f : R n → R n D V [22 ] : ...
移动机器人全局轨迹跟踪的自适应滑模控制
1
2006
... 为了验证本文基于新型趋近律的改进滑模控制方法的响应特性和鲁棒性,将改进滑模控制方法与文献[23 ]中基于指数趋近律的传统滑模控制方法进行仿真对比分析.利用MATLAB/Simulink软件开展悬臂式掘进机轨迹跟踪控制仿真,仿真结构如图4 所示.鉴于在任意给定的初始位姿下,起始位置与期望位置之间仅包括直线路径和圆弧路径[24 ] ,故本文将分别针对直线轨迹和圆弧轨迹进行轨迹跟踪仿真分析. ...
移动机器人全局轨迹跟踪的自适应滑模控制
1
2006
... 为了验证本文基于新型趋近律的改进滑模控制方法的响应特性和鲁棒性,将改进滑模控制方法与文献[23 ]中基于指数趋近律的传统滑模控制方法进行仿真对比分析.利用MATLAB/Simulink软件开展悬臂式掘进机轨迹跟踪控制仿真,仿真结构如图4 所示.鉴于在任意给定的初始位姿下,起始位置与期望位置之间仅包括直线路径和圆弧路径[24 ] ,故本文将分别针对直线轨迹和圆弧轨迹进行轨迹跟踪仿真分析. ...
Optimal paths for a car that goes both forwards and backwards
1
1990
... 为了验证本文基于新型趋近律的改进滑模控制方法的响应特性和鲁棒性,将改进滑模控制方法与文献[23 ]中基于指数趋近律的传统滑模控制方法进行仿真对比分析.利用MATLAB/Simulink软件开展悬臂式掘进机轨迹跟踪控制仿真,仿真结构如图4 所示.鉴于在任意给定的初始位姿下,起始位置与期望位置之间仅包括直线路径和圆弧路径[24 ] ,故本文将分别针对直线轨迹和圆弧轨迹进行轨迹跟踪仿真分析. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}