


随着机器人技术的不断进步,速度快、精度高、质量小、安全可靠、人-机-环境共融性好成为机器人的发展趋势。传统刚性机器人难以实现轻量化,且环境共融性差,近年来柔性机器人成为研究热点。但是,柔性机器人存在刚度低、控制模型不精确和控制复杂等缺点,如何改善支承刚度和提高定位精度是柔性机器人的研究重点。
目前,国内外学者对变刚度柔性机械臂的研究已取得了一系列成果。项超群等[6]设计的仿章鱼软体机械臂通过“横向肌”与“纵向肌”同时收缩的方式来使硅胶体缩紧,使得机械臂产生拮抗作用以实现变刚度。李康康等[7]提出了一种可实现大范围变刚度的五自由度手腕,通过调节弹性张力来改变手腕的刚度,以实现对工件的俯仰、翻转、平移和偏转等操作。Steltz等[8-9]通过在圆球内充填散粒体的方式设计了可阻塞圆球,其由若干个单元组成,每个单元内均充满散粒体,通过真空泵控制各个单元的阻塞性能,以实现可阻塞圆球的滚动。在此基础上,他们还设计了阻塞变刚度驱动器JMU(jamming modulated unimorph)单元和阻塞变刚度机构JMUW(jamming moudulated unimorph worm)。Brown等[10]基于散粒体阻塞机理开发了一种多功能柔性机器人手爪。段韦婕等[11]设计了一种具有可重构性的变刚度柔性驱动器,可通过改变弹性元件的几何参数、材料和数量来实现重构,通过径向调节预紧力来实现可调范围内的变刚度。Cheng等[12]设计了一种可用于不规则物体抓取的机械臂。Jiang等[13]针对医疗领域的柔性机器人,基于散粒体阻塞特性,研究了不同形状、不同大小的散粒体对阻塞杆刚度的影响。Jiang、Athanassiadis和Wall等[14-16]基于仿生学原理和散粒体阻塞特性,对柔性机器人的力学特性进行了理论分析和实验研究。除了利用散粒体阻塞特性来实现变刚度外,还可以利用特殊材料在温度场、磁场、电场等作用下产生相变的特性来改变刚度。目前,常用的特殊材料主要有磁流变液和低熔点合金两种。其中,磁流变液既可以像液体一样流动,又具有固体磁性材料的磁性,通过改变外加磁场的强度即可改变磁流变液的剪切模量、弹性模量等。但通过外加强磁场来实现柔性机械臂的可控制变形和变刚度可能会导致其安全性能受到影响。
综上所述,散粒体阻塞特性是实现柔性机械臂变刚度控制的有效方法。虽然,许多学者已在利用散粒体阻塞理论实现柔性机械臂变刚度控制方面取得了一系列的实验研究成果[17-19],但基于散粒体阻塞的变刚度机构理论模型研究仍为制约变刚度柔性机械臂研究的瓶颈。为促进散粒体阻塞理论在变刚度柔性机械臂研究中的广泛应用,笔者首先通过在柔性硅胶管内充填塑料颗粒来构建变刚度杆,并基于理论分析和实验研究建立其刚度模型;然后沿圆周方向将3根变刚度杆对称并联布置以构建变刚度柔性机械臂,并结合变刚度杆的刚度模型,构建柔性机械臂刚度与变刚度杆真空度之间的函数关系;最后对柔性机械臂的定位精度进行实验研究,旨在为实现变刚度柔性机械臂的准确控制提供理论依据。
1 变刚度杆设计与分析
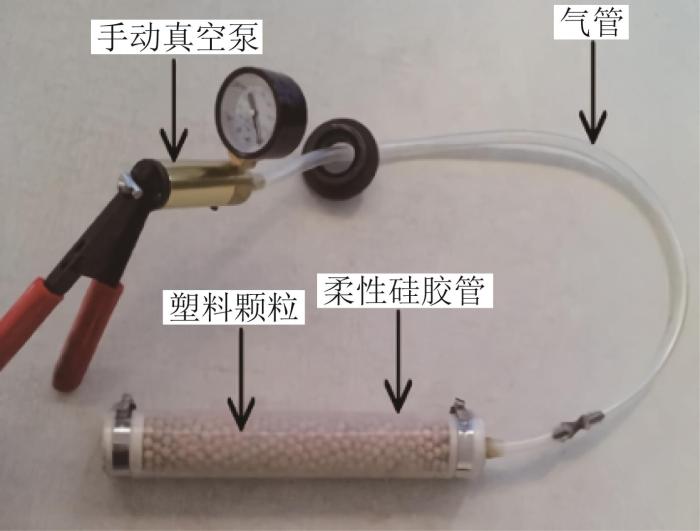
所设计的变刚度杆的结构如图1所示。柔性硅胶管两端封闭形成密闭腔,内部充填塑料颗粒。在手动真空泵的作用下,密闭腔内的真空度改变,散粒体阻塞状态改变,从而导致变刚度杆的刚度发生变化。当密闭腔内为大气压时,变刚度杆表现为柔性杆;当密闭腔内为负压时,变刚度杆表现为刚性杆。
图1
1.1 变刚度杆的理论刚度模型
图2
当变刚度杆处于静止或低速运动状态时,其静力平衡方程可表示为:
式中:
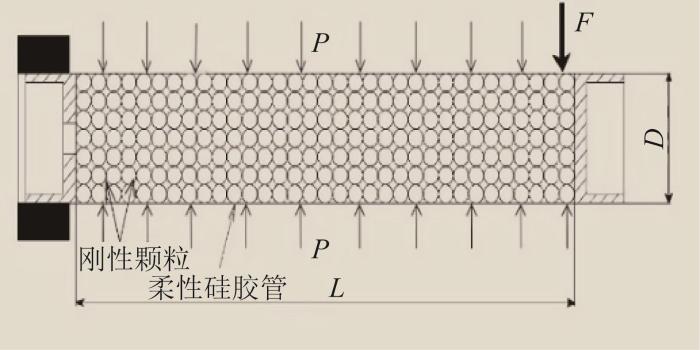
在柔性硅胶管的作用下,密闭腔内颗粒受到均匀压力差P的作用,忽略颗粒间的滚动摩擦力,则颗粒间的力传递过程无损失。假设颗粒间无重叠,则变刚度杆内颗粒间的受力情况如图3所示。
图3
根据图3,可得:
其中:
式中:
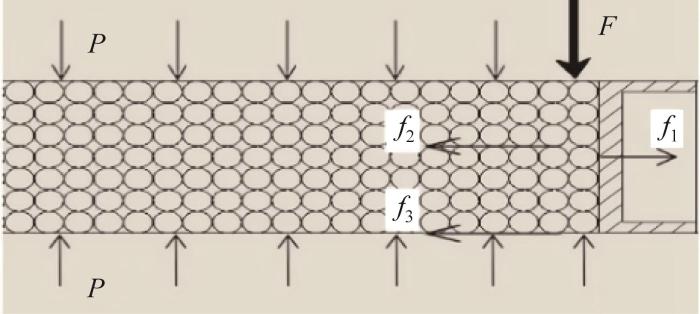
由于将变刚度杆视作悬臂梁,则其摩擦力矩可表示为:
式中:x为长度变量。
联立
根据
式中:F为变刚度杆受到的外部作用力。
由
联立
式中:
1.2 变刚度杆力学特性实验研究
图4

图4
变刚度杆力学特性实验装置
Fig.4
Experimental device for mechanical characteristics of variable stiffness rod
图5
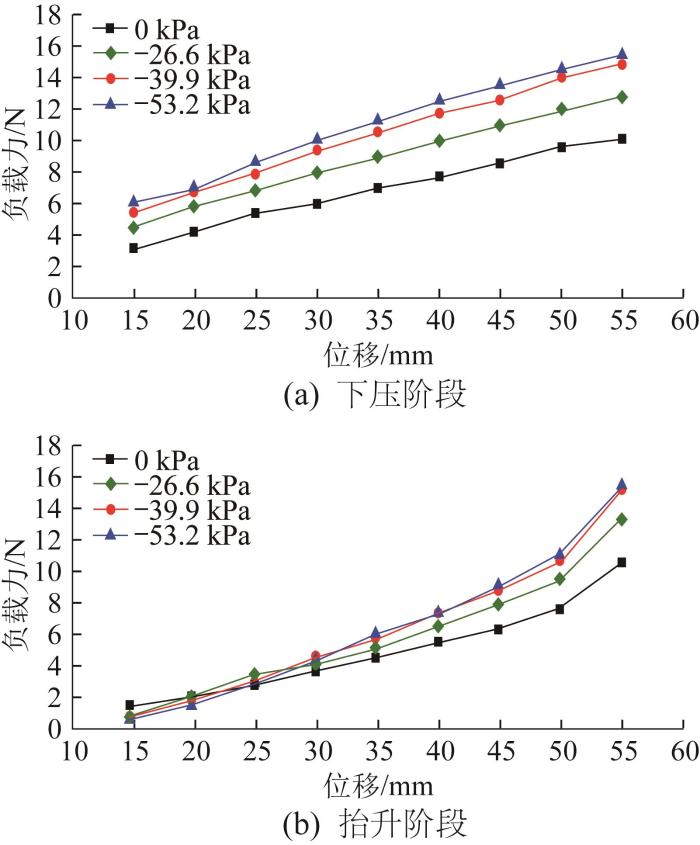
图5
不同真空度下变刚度杆负载力与位移的关系曲线
Fig.5
Relationship curves of load force and displacement of variable stiffness rod under different vacuum degrees
由图5可知,变刚度杆在下压阶段和抬升阶段均有较大的塑性变形。在下压阶段,变刚度杆所受的负载力与位移呈线性关系;在抬升阶段,负载力与位移呈一定的非线性关系。在相同形变的情况下,变刚度杆所受的负载力随真空度的增大而增大。
根据
图6
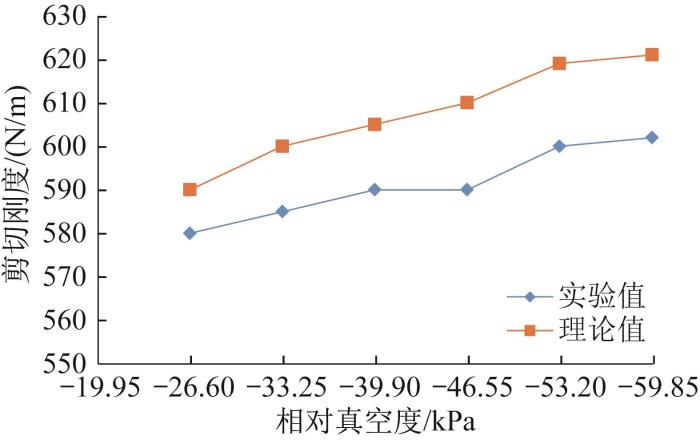
图6
变刚度杆剪切刚度的理论值与实验值对比
Fig.6
Comparsion of theoretical value and experimental value of shear stiffness of variable stiffness rod
2 变刚度柔性机械臂系统设计
变刚度柔性机械臂系统由变刚度柔性机械臂和刚度调节装置组成,其中刚度调节装置包括MPU6050方位传感器、电磁阀组、控制电脑、Arduino单片机、空压机和真空泵等,如图7所示。
图7
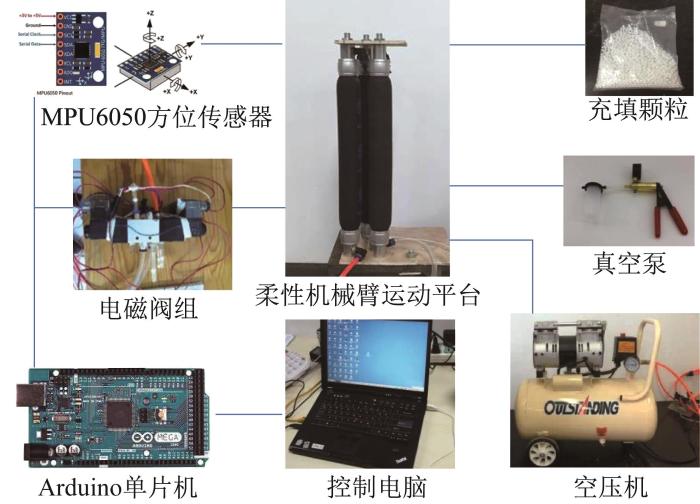
变刚度柔性机械臂由3根沿圆周对称并联布置的变刚度杆组成。由于柔性硅胶管的弹性较小,为了获取更好的拉伸、压缩特性,利用气动人工肌肉代替柔性硅胶管,其内部填充直径为3 mm的塑料颗粒。通过调节变刚度杆内的气压来驱动柔性机械臂运动,将1根或2根变刚度杆作为驱动杆,其余作为支撑杆,可实现柔性机械臂的缩短、弯曲、偏转、扭转等;通过调节支撑杆内的真空度可改变柔性机械臂的刚度。变刚度柔性机械臂的主要结构尺寸和最大弯曲角度如表1所示。
表1 变刚度柔性机械臂的主要参数
Table 1
| 参数 | 量值 |
|---|---|
| 初始长度 | 510 mm |
| 质量 | 746 g |
| 气动人工肌肉直径 | 20 mm |
| 最大弯曲角度 | 90 |
3 变刚度柔性机械臂实验研究
3.1 实验平台搭建
变刚度柔性机械臂实验平台如图8所示。其中:正压驱动部分由空压机、3个三位五通电磁阀和3个节流阀组成,可实现3根变刚度杆的独立控制。利用真空泵对变刚度杆的真空度进行调节,可在一定范围内改变柔性机械臂的刚度。柔性机械臂末端的角度通过角度传感器测量,变刚度杆内部压力由气压传感器测量。
图8
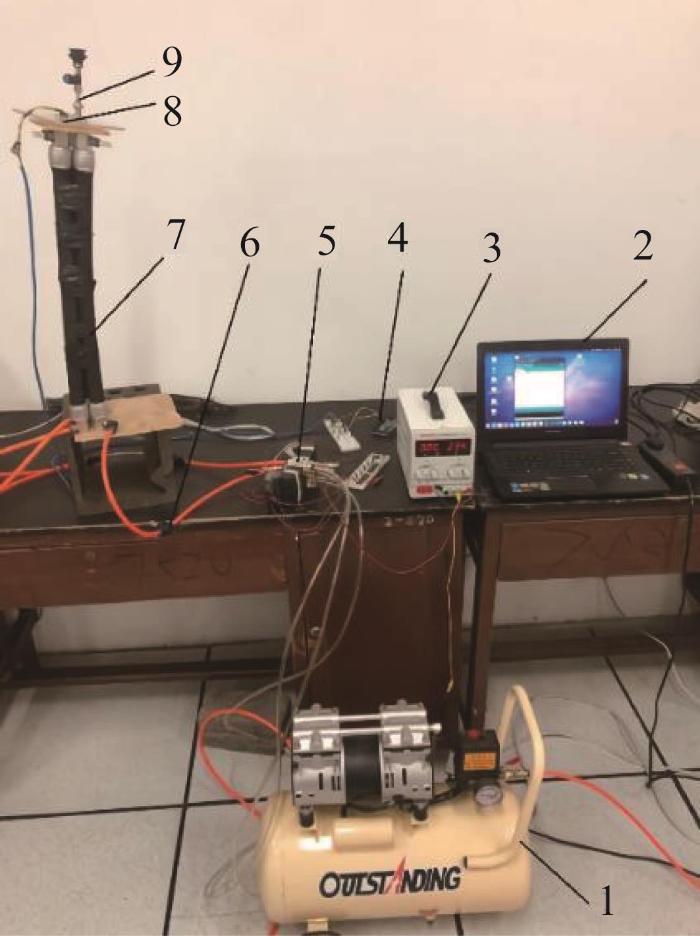
图8
变刚度柔性机械臂实验平台
1—空压机;2—控制电脑;3—直流电源;4—Arduino单片机;5—电磁阀;6—压力阀;7—变刚度柔性机械臂;
8—角度传感器;9—位移传感器。
Fig.8
Experimental platform of variable stiffness flexible manipulator
3.2 驱动性能测试实验
变刚度柔性机械臂驱动性能测试实验现场如图9所示。在实验过程中,以3号变刚度杆作为支撑杆并施加一定的真空度(分别为0,-26.6,-39.9,-53.2 kPa);以1号和2号变刚度杆作为驱动杆,分别施加不同的气压。驱动杆的加压范围为0~350 kPa,每间隔50 kPa记录一次数据,每个数据重复测3次并取平均值。
图9
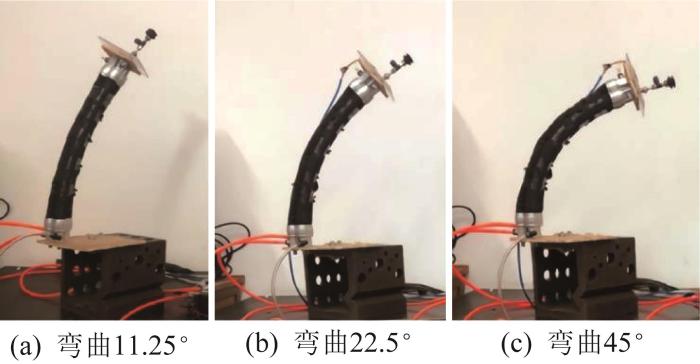
图9
变刚度柔性机械臂驱动实验现场
Fig.9
Driving experimental site of variable stiffness flexible manipulator
图10
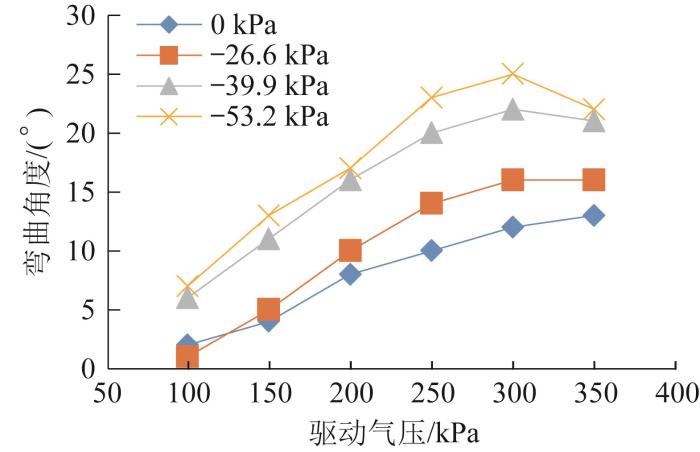
图10
变刚度柔性机械臂的驱动性能曲线
Fig.10
Driving performance curves of variable stiffness flexible manipulator
3.3 定位实验
柔性机械臂具有很高的灵活度,但其刚度较低,定位精度较低,而散粒体阻塞特性能有效提高其刚度,从而提高其定位精度。以变刚度柔性机械臂的偏转角度作为其定位精度的评价指标:偏转角度越小,定位精度越高。通过实验测量变刚度柔性机械臂在支撑杆具有不同真空度(分别为0,-13.3,-26.6,-39.9 kPa)时的偏转角度,并构建其剪切刚度与偏转角度之间的函数关系,揭示其剪切刚度与定位精度之间的映射关系。为测量变刚度柔性机械臂的偏转角度,向2根驱动杆内充入给定气压的压缩空气,实现柔性机械臂向任意方向的运动。每个真空度下测量5组偏转角度数据,每组读取7个角度。取5组偏转角度的平均值作为对应剪切刚度下的定位精度。不同真空度下变刚度柔性机械臂的剪切刚度与定位精度如表2所示。表中剪切刚度由
表2 变刚度柔性机械臂的剪切刚度与定位精度
Table 2
| 真空度/kPa | 剪切刚度/(N/m) | 定位精度/(º) |
|---|---|---|
| 0 | 180 | 0.42 |
| -13.3 | 240 | 0.25 |
| -26.6 | 300 | 0.20 |
| -39.9 | 360 | 0.19 |
式中:Y为定位精度。
图11
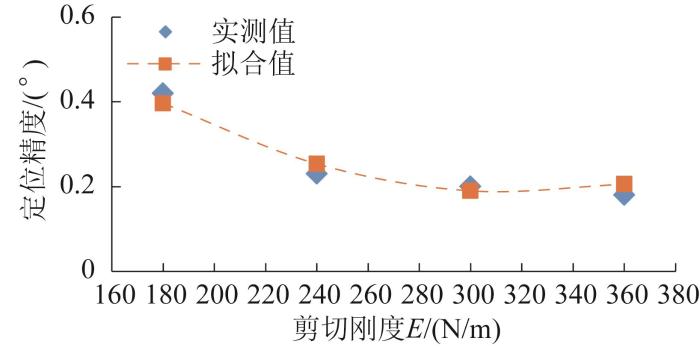
图11
变刚度柔性机械臂定位精度与剪切刚度的关系曲线
Fig.11
Relationship curve of positioning accuracy and shear stiffness of variable stiffness flexible manipulator
由图11可以直观地看出,变刚度柔性机械臂的定位精度在一定范围内随着其剪切刚度的提高而提高;当剪切刚度达到320~340
4 结 论
本文基于散粒体阻塞机理对柔性机械臂的变刚度控制展开了研究。主要工作和结论如下。
1)基于散粒体阻塞机理设计了变刚度杆和变刚度柔性机械臂。
2)构建了变刚度杆的理论刚度模型,并通过实验证明了该理论刚度模型的准确性。
3)基于搭建的实验平台,对变刚度柔性机械臂的驱动性能和定位精度进行了研究,并拟合得到了其定位精度与剪切刚度的数学模型。
所设计的变刚度柔性机械臂具有驱动-支撑-变刚度一体化、刚度易调节、驱动性能好、精度可控制等特点。该柔性机械臂既具有柔性机构的安全性和灵活性,又可调节支承刚度和改变定位精度。研究结果对促进柔性机械臂在工业机器人、服务机器人领域的广泛应用,以及提高人-机交互、人-机协同安全性方面有重要意义。
参考文献
Jamming at zero temperature and zero applied stress: the epitome of disorder
[J].
柔性驱动与刚度可调结构/功能一体化微创手术操作臂设计制造与性能研究
[J].
Design, fabrication and performance of a flexible minimally invasive surgery manipulator integrated with soft actuation and variable stiffness
[J].DOI:10.3901/jme.2018.17.053 [本文引用: 1]
Soft actuator model for a soft robot with variable stiffness by coupling pneumatic structure and jamming mechanism
[J].
A positive pressure universal gripper based on the jamming of granular material
[J].
Soft particles for granular jamming
[C]//
新型变刚度软体手臂的设计及控制
[J].
Design and control of a novel variable stiffness soft arm
[J].
面向柔顺装配装夹的机器人手腕变刚度机理研究
[J].
Research on variable-stiffness mechanisms of robot wrists for compliant assembling-clamping
[J].DOI:10.3901/jme.2022.19.077 [本文引用: 1]
JSEL: jamming skin enabled locomotion
[C]//
Jamming as an enabling technology for soft robotics
[C]//SPIE Smart Structures and Materials+Nondestructive Evaluation and Health Monitoring,
Universal robotic gripper based on the jamming of granular material
[J].
可重构变刚度柔性驱动器的设计与性能分析
[J].
Design and performance analysis of reconfigurable variable stiffness compliant actuator
[J].DOI:10.3785/j.issn.1006-754X.2023.00.028 [本文引用: 1]
Design and analysis of a robust, low-cost, highly articulated manipulator enabled by jamming of granular media
[C]//
Design of a variable stiffness flexible manipulator with composite granular jamming and membrane coupling
[C]//
Stiffness-controllable octopus-like robot arm for minimally invasive surgery
[C]//
Particle shape effects on the stress response of granular packings
[J].
Selective stiffening of soft actuators based on jamming
[C]//
变刚度杆轴向压缩力的实验研究
[J].
Research on axial compression force of variable stiffness link
[J].DOI:10.3969/j.issn.1674-9146.2017.08.091 [本文引用: 2]
Analysis of vibration characteristics of rotating parallel flexible manipulator considering joint elastic constraints
[J].
气动软体机械臂模块变刚度性能分析
[J].
Variable stiffness analysis on a pneumatic soft manipulator
[J].DOI:10.3901/jme.2020.09.036 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}