基于散粒体阻塞机理的变刚度柔性机械臂研究
Research on flexible manipulator with variable stiffness based on particle blocking mechanism
基于散粒体阻塞机理的变刚度柔性机械臂研究 |
| 金洪杨,岳龙旺,刘景达,郑卫卫,赵朝,徐嘉辉 |
|
Research on flexible manipulator with variable stiffness based on particle blocking mechanism |
| Hongyang JIN,Longwang YUE,Jingda LIU,Weiwei ZHENG,Zhao ZHAO,Jiahui XU |
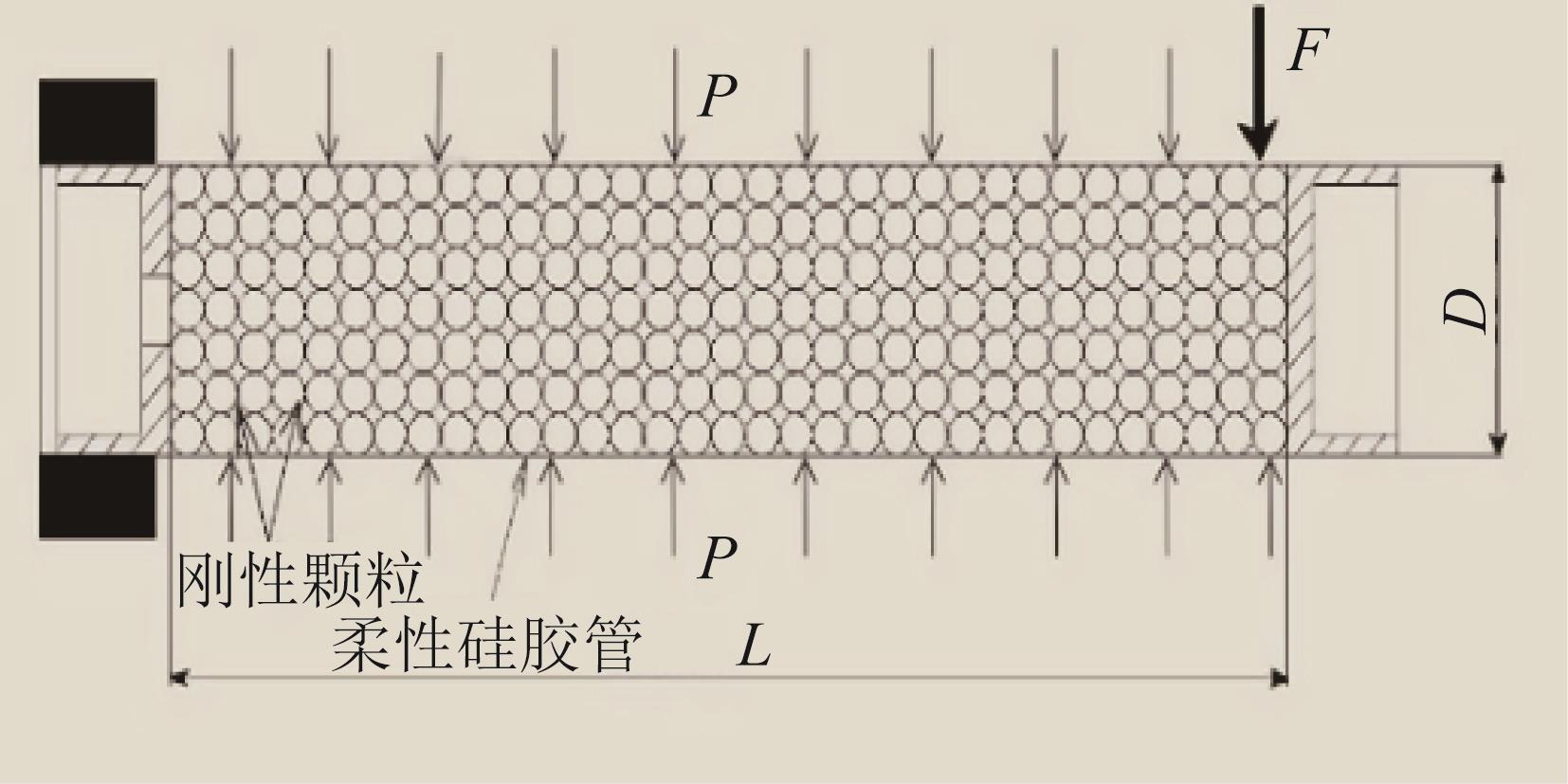
| 图2 变刚度杆剪切模型 |
| Fig.2 Shear model of variable stiffness rod |
|
|