


国内外学者已对爬壁机器人磁吸附机构的结构形式进行了大量研究,取得了丰硕的成果。磁吸附机构的结构形式主要为平板式和轮式。平板式即结构为长方体的永磁体,其主要有2种实现形式:镶嵌在履带式机器人的履带上和安装在轮式机器人的车架上。Jie等[9-11]根据壁虎在圆柱墙面上的运动特点,提出了一种将永磁铁作为履带的爬壁机器人,实现了其水平和竖直行走。Kalra等[12-13]提出的爬壁机器人由镶嵌在履带上的永磁体提供吸附力。此类机器人采用履带式磁吸附机构,虽然提高了其对壁面的适应性,但运动灵活性较差。陈勇等[14-15]基于Halbach阵列原理提出了一种磁力可调的吸附机构,该机构安装于机器人底盘上,当机器人经过凹面时,磁吸附机构至壁面的距离会增大,导致机器人吸附力急剧减小而可能发生脱落,而经过凸面或其他表面凸起时,磁吸附机构会与壁面发生摩擦碰撞。轮式磁吸附机构的结构形式也有2种:单磁路磁轮和多磁路磁轮。Fernández等[16]提出了一种分体式单磁路磁轮,将12个轴向充磁的圆柱磁铁安装在2块轭铁平板之间,这种布置形式会导致磁铁漏磁较大,磁能利用率较低。潘柏松等[17]基于Halbach阵列方法提出了一种环形阵列磁轮,在磁铁外层进行了包胶处理,但由于橡胶为弹性材料,磁轮与导磁立面之间的力穿过橡胶后仍会直接作用在磁铁上,严重影响磁铁的使用寿命,且多磁路设计会使吸附机构加工和安装较为困难,需要专业的工装。
基于上述问题,本文以轮式爬壁机器人为研究对象,结合其功能要求,设计了一种悬摆式磁吸附机构。首先,采用Ansoft软件对所设计的悬摆式磁吸附机构与传统磁吸附轮进行仿真分析,并对其磁场分布和磁场强度变化进行对比;其次,基于高磁能利用率的目标,采用Ansoft软件中的SNLP(sequential non-linear programming,连续非线性规划)算法对所设计的磁吸附机构的结构参数进行优化,旨在减小磁吸附机构总体质量的同时提高其吸附可靠性及吸附能力;最后,研制了悬摆式磁吸附轮样机,进行了吸附力测试实验和卸磁实验,并将其安装在爬壁机器人上,开展壁面运动性能测试实验,来验证该悬摆式磁吸附机构参数优化结果的合理性及结构的可靠性。
1 悬摆式磁吸附机构设计原理
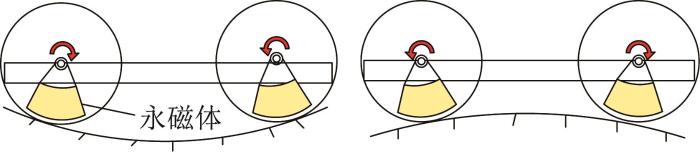
因自身结构特性,履带式爬壁机器人与壁面接触面积较大,虽然其壁面适应能力较强,但运动灵活性欠佳。因此,选取与壁面接触面积较小、运动灵活性较高的轮式爬壁机器人作为研究对象,对其磁吸附机构进行设计与分析。现有的磁吸附机构如图1所示。将其搭载在爬壁机器人上进行工作时,存在诸多不足:机器人搭载平板式磁吸附机构时,难以适应结构体多变的壁面;搭载单磁路磁轮时,漏磁较大,磁能利用率较低;搭载多磁路磁轮时,因此类磁轮大多基于Halbach阵列方法设计而成,磁铁结构体增多导致其质量增大,且部分磁铁块因远离壁面导致形成的吸附力较小,造成能量浪费,相邻磁铁块一般需要专业的工装进行整合,加工成本也较高。因此,为了实现磁吸附机构对多种曲面的适应性、轻量化及易于加工和安装,作者设计了悬摆式磁吸附机构,如图2所示。磁吸附机构的结构应最小化,既能够保证机器人所需的吸附力,又能使能量损失较小;在机器人运动过程中磁吸附机构与壁面形成一定的夹角,能适应壁面变化;磁吸附机构应加工、安装方便,且成本最小化。因此,在保证机器人稳定性与灵活性的前提下,实现磁吸附机构运动姿态的变化,同时能提供足够的吸附力,是悬摆式磁吸附机构设计的关键。
图1

图2
2 悬摆式磁吸附机构结构设计及分析
2.1 爬壁机器人整体结构
图3
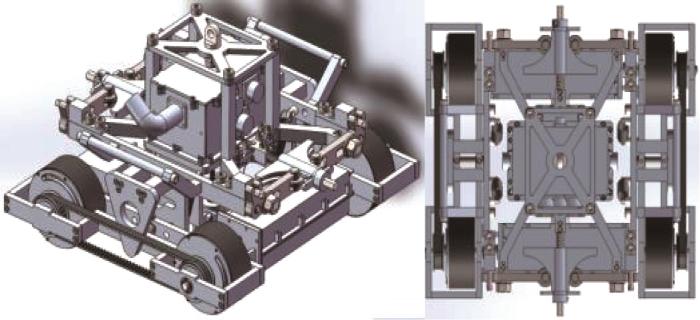
图4
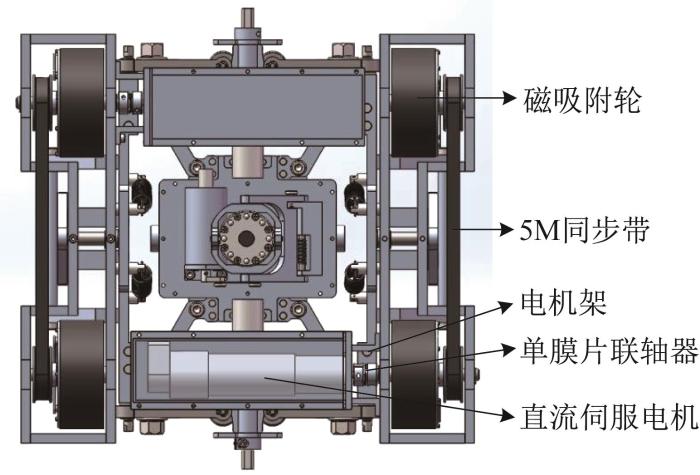
图4
爬壁机器人传动机构的结构
Fig.4
Structure of transmission mechanism of wall-climbing robot
2.2 悬摆式磁吸附机构的结构
所设计的悬摆式磁吸附机构的结构如图5所示。磁吸附机构采用单磁路方式,永磁体充磁采用径向单极充磁方式。由于在单极充磁方式下磁场的范围较大,为了防止出现较大漏磁的现象,永磁体外围设置有轭铁,使得永磁体产生的磁感线与轭铁、导磁立面形成闭合回路,从而达到增大磁吸附力的目的。
图5
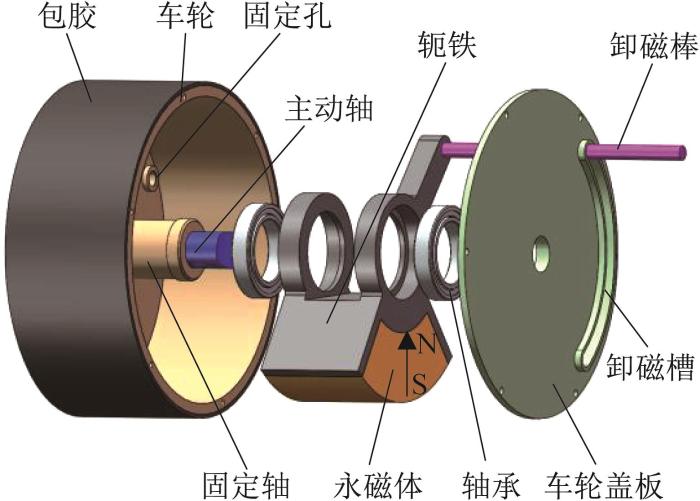
主动轴通过平键将动力传递给车轮,带动车轮运动。轭铁与永磁体通过胶粘连接为一整体,轭铁上设有孔,通过轴承安装在车轮内部突出的固定轴上。当车轮转动时,磁铁与车轮相对转动,通过磁力吸附使得永磁体吸附力的方向始终与导磁立面垂直。车轮与磁吸附机构采用分体式安装,磁吸附机构安装于车轮内部,可对磁铁起到保护作用,避免永磁体材料碎裂。
当机器人在运行过程中出现突发状况,如停止不动、控制出现故障时,须将机器人从壁面上卸下进行检修。由于吸附力的存在,人工难以直接将机器人脱离壁面。因此,在车轮盖板上加工有卸磁槽,轭铁上加工有卸磁棒通孔,车轮内侧加工有固定孔。卸磁时,将卸磁棒通过卸磁槽插入轭铁的通孔内,转动手柄带动轭铁转动,磁铁随之转动,当卸磁棒旋转90°后,卸磁棒可穿过通孔插入固定孔内,使得磁铁在此状态下相对静止,从而完成卸磁操作。
2.3 悬摆式磁吸附机构与传统磁吸附轮的对比
图6

图7
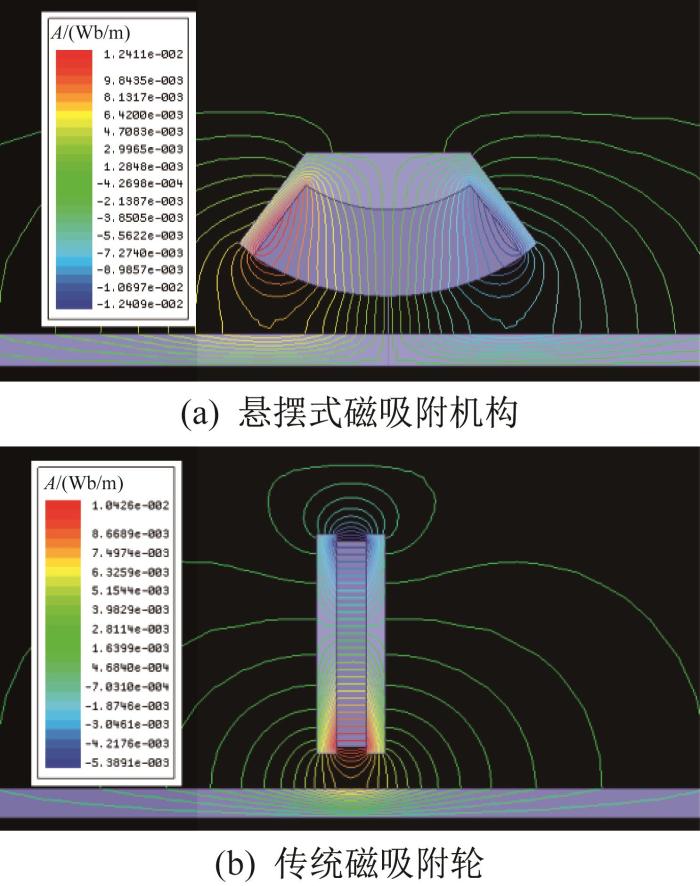
图7
磁吸附机构的磁场分布
Fig.7
Magnetic field distribution of magnetic adsorption mechanism
图8
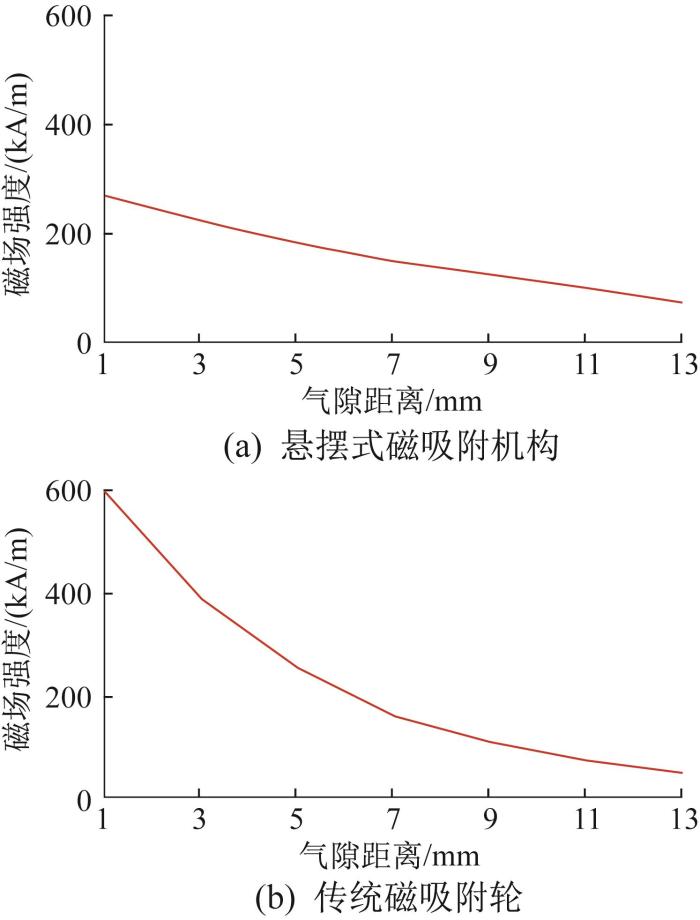
图8
磁吸附机构车轮径向磁场强度的变化
Fig.8
Variation of magnetic field strength along the radial direction of wheel of magnetic adsorption mechanism
由图7可知:悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成了闭合回路,且磁感线疏密程度变化比较均匀;传统磁吸附轮磁路的磁能利用率较低,部分磁场没有与导磁立面形成闭合回路,且磁吸附轮边缘的磁感线最为密集,磁场强度最大,而接近导磁立面处的磁感线较为稀疏,磁场强度变化较大。
3 悬摆式磁吸附机构结构参数的优化
3.1 优化目标
为了使磁吸附机构的磁损量最小,磁能利用率最高,实现在减小爬壁机器人整体质量的前提下增强机器人吸附稳定性的目的,须在保证最小安全吸附力的条件下,获得较高的吸附效率[19]。定义:
式中:λ为吸附效率;Fm为单个磁吸附机构的实际磁吸附力;Ft为单个磁吸附机构所需的最小吸附力;Gg为悬摆式磁吸附机构的重力。
优化的目标即为求取最高吸附效率
3.2 优化模型
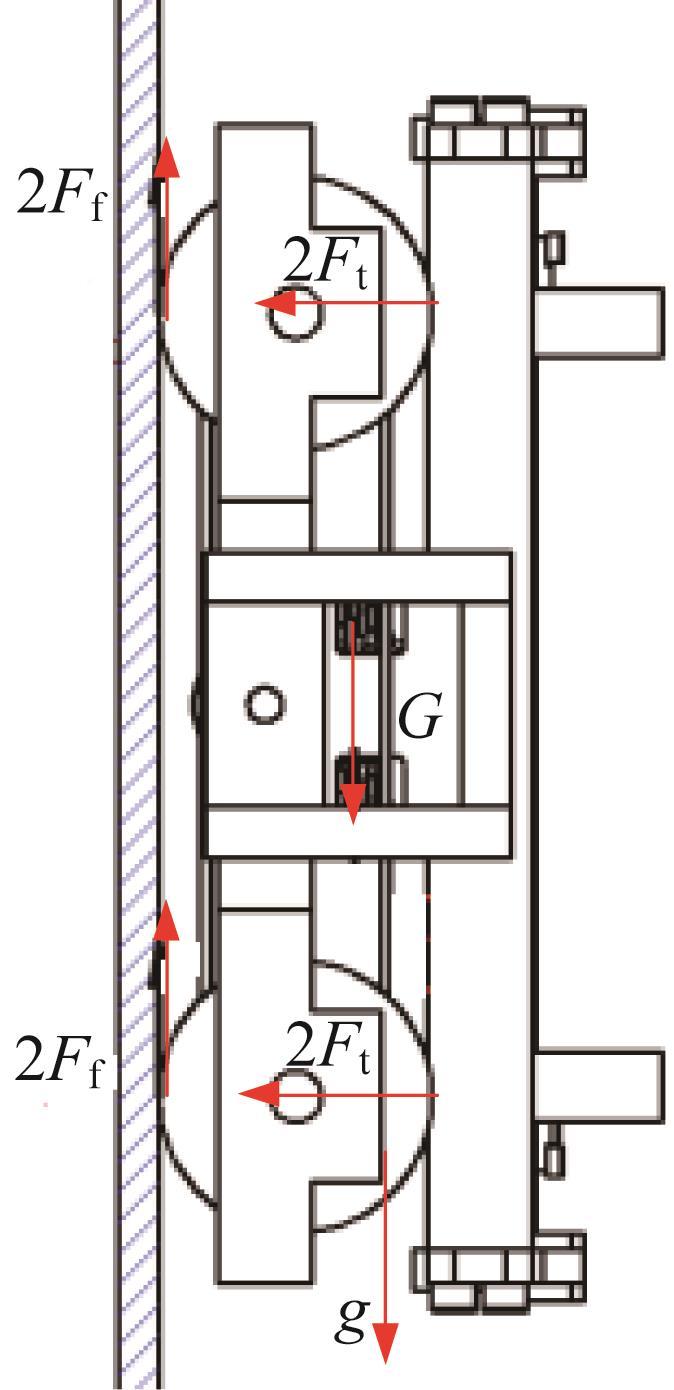
结合爬壁机器人在壁面的状态,进行机器人受力分析。机器人在竖直方向的受力如图9所示。图中:G为机器人重力;g为负载;Ff为机器人所受的摩擦力。
图9
根据爬壁机器人吸附功能要求,有:
根据设计要求,取G=100 N,g=50 N,则Ft≥105 N。
Gg由磁吸附机构的结构参数确定。悬摆式磁吸附机构的结构参数如图10所示。图中:r为磁铁内径;R为磁铁外径;l为磁铁厚度;α为磁铁偏角;H为轭铁上表面至磁铁的距离;d为轭铁侧边厚度;S1 、S2 、S3 、Smag分别为各区域的面积。
图10
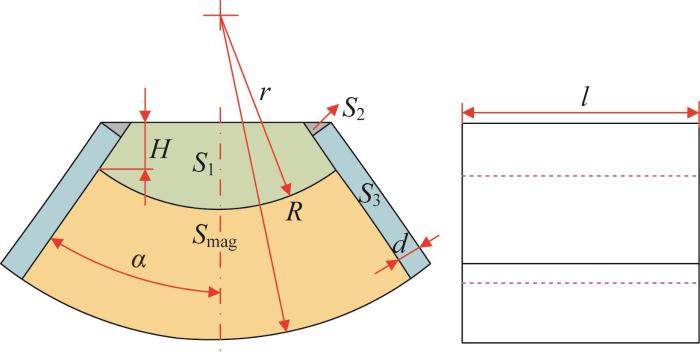
图10
悬摆式磁吸附机构结构参数示意
Fig.10
Schematic of structural parameters of pendulous magnetic adsorption mechanism
磁铁质量Gmag和轭铁质量Gyoke分别为:
式中:ρmag为磁铁材料的密度;ρyoke为轭铁材料的密度。
则:
根据所设计的爬壁机器人的实际安装空间,确定R=41 mm,l=30 mm,d=3 mm,而须优化的参数为r、α和H。这3个参数的取值范围为:
根据以上分析,可得优化模型为:
3.3 优化过程及结果
3.3.1 吸附机构的有限元模型
图11
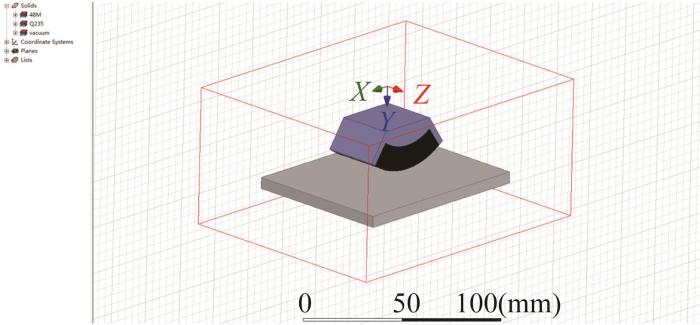
图11
悬摆式磁吸附机构的有限元模型
Fig.11
Finite element model of pendulous magnetic adsorption mechanism
3.3.2 吸附机构结构参数的优化
采用Ansoft Optimization中的SNLP算法作为优化算法对吸附机构的结构参数进行优化。此算法基于响应面法逼近有限元响应的特性,适用于优化参数较少的情况,是Ansoft Optimization优化方法中收敛速度最快的[23]。
吸附机构结构参数的优化过程如图12所示。首先,在软件中添加优化模型,如图(a)所示,并对模型的目标函数及其求解量进行设定,设置最大迭代数为500次;其次,进行模型求解,如图(b)所示;经过130次迭代后,优化收敛完成,如图(c)所示;最后,得到优化结果,部分优化数据如图(d)所示。
图12
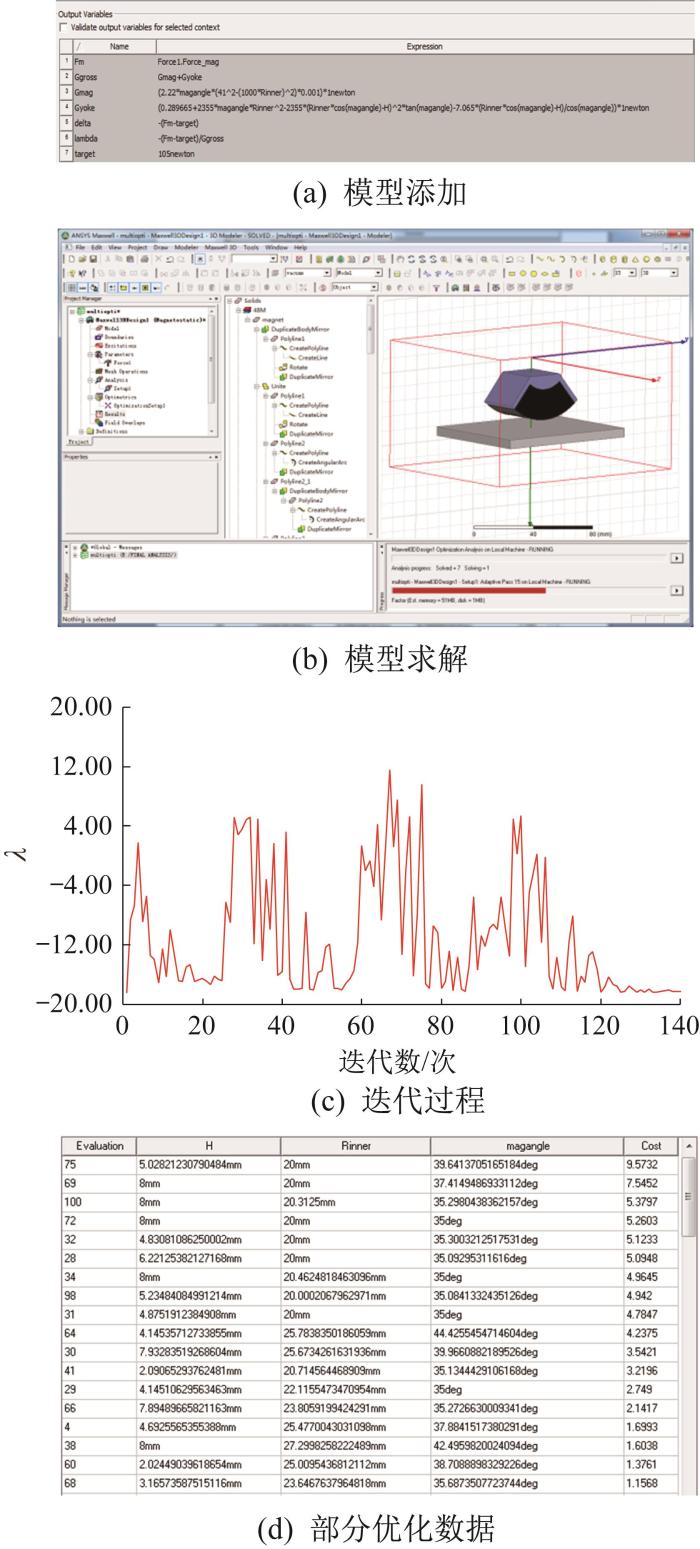
图12
悬摆式磁吸附机构结构参数的优化过程
Fig.12
Optimization process of structural parameters of pendulous magnetic adsorption mechanism
对优化前后吸附机构的结构参数和性能参数进行对比,如表1所示。
表1 优化前后悬摆式吸附机构的结构参数和性能参数
Table 1
| 优化前后 | r /mm | α /(°) | H/mm | Fm/N | Gg /N | |
|---|---|---|---|---|---|---|
| 优化前 | 25 | 35 | 6 | 104.16 | 2.15 | -0.39 |
| 优化后 | 20 | 39.64 | 5.03 | 129.93 | 2.60 | 9.59 |
| 变量取整 | 20 | 40 | 5 | 130.75 | 2.63 | 9.79 |
由表1可知:在初步设定的结构参数下,单个磁吸附机构的实际磁吸附力为104.16 N,略小于单轮所需的最小吸附力,无法满足要求;优化后,吸附力达到130.75 N,比优化前增大了25.52%,大于单轮所需的最小吸附力;虽然优化后磁吸附机构的质量略大于优化前,但吸附效率达到9.79,明显高于优化前,满足了设计需要。且根据优化模型,优化后磁铁质量可达到最小,磁能利用率最高。
4 实验验证
为了验证所设计的悬摆式磁吸附机构的合理性及优化仿真结果的准确性,按照优化之后的尺寸制作了悬摆式磁吸附机构,并进行相关实验。
1)吸附力测试实验。
实验用吸附钢板的厚度为6 mm,采用分辨率为0.01 kg的电子拉力计作为测力工具。将磁吸附机构吸附在钢板上,对其施加负载直至掉落,测量最终的负载质量,从而获得最大吸附力。测试实验的现场如图13所示。
图13
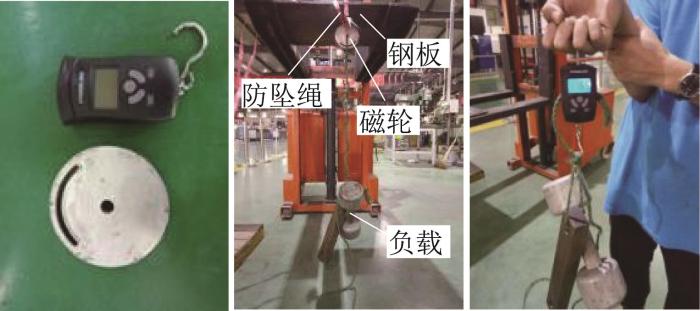
图13
悬摆式磁吸附机构吸附力测试实验现场
Fig.13
Testing experiment site for the adsorption force of pendulous magnetic adsorption mechanism
经过多次实验,可得吸附机构的吸附力为121.5 N,比仿真值(130.75 N)小9.25 N,相对误差为7%,误差较小,表明仿真结果较为合理。
2)卸磁实验。
为了进一步验证悬摆式磁吸附机构在工程上的实用性,对其进行人工卸磁实验。卸磁操作如图14所示。实验表明,人工能够轻松地进行卸磁操作,满足了设计要求。
图14
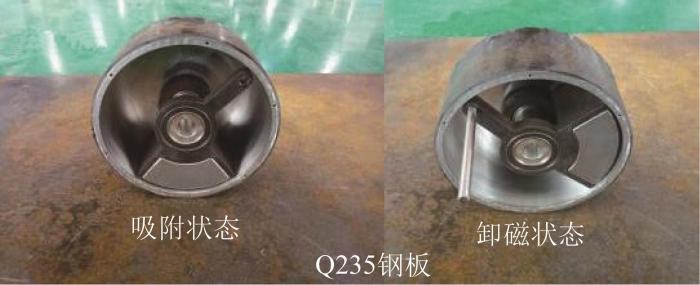
图14
悬摆式磁吸附机构卸磁操作示意
Fig.14
Schematic of demagnetization operation for pendulous magnetic adsorption mechanism
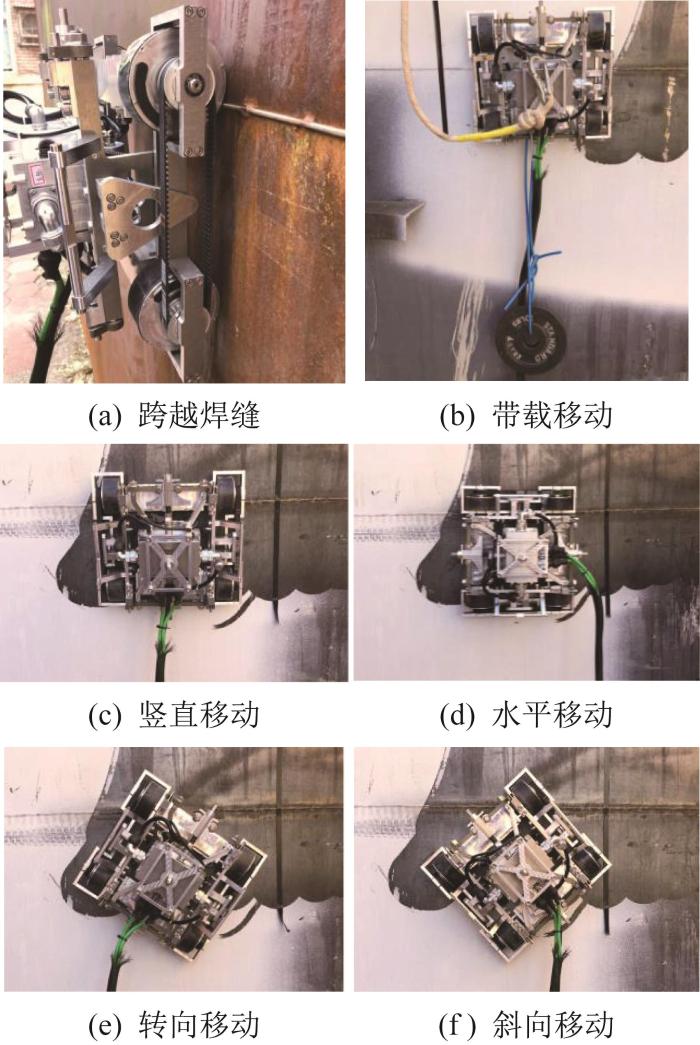
3)运动性能测试实验。
图15
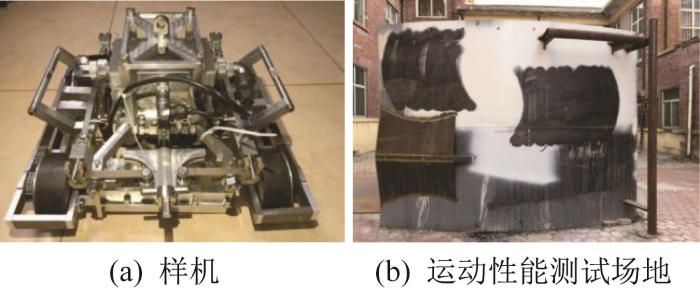
图15
爬壁机器人样机及运动性能测试场地
Fig.15
Prototype and motion performance testing site of wall-climbing robot
图16
5 结 论
本文以轮式爬壁机器人为研究对象,分析了现有磁吸附机构设计中的不足,提出并研制了一种壁面自适应悬摆式磁吸附机构。该机构的磁场梯度较小,磁力变化受气隙的影响较小,能够自适应不规则的立面,且加工、安装方便。
以减小磁吸附机构的质量同时提高其吸附可靠性为目标,基于高磁能利用率,通过Ansoft软件中的SNLP算法对所设计的磁吸附机构的结构参数进行了优化。优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高。
研制了悬摆式磁吸附车轮样机,开展了吸附力测试实验。吸附力仿真值与实验值的相对误差为7%,误差较小,验证了结构参数优化结果的合理性。开展了卸磁实验,验证了该磁吸附机构的实用性。将其安装在爬壁机器人上,开展了运动性能测试实验,验证了该磁吸附机构具有良好的运动性能。
参考文献
爬壁机器人的研究现状
[J].
Research status for wall-climbing robot
[J].DOI:10.3969/j.issn.1009-9492.2019.09.003 [本文引用: 1]
Analysis and application of dual-row omnidirectional wheels for climbing robots
[J].
A robot application for marine vessel inspection
[J].
Development of a climbing robot for grit blasting operations in shipyards
[C]//
High-payload climbing and transitioning by compliant locomotion with magnetic adhesion
[J].
Development of wall climbing robotic system for inspection purpose
[C]//
新型罐壁检测爬行机器人的行走吸附机构设计
[J].
The walk-adsorption mechanism design of a new tank-wall-climbing inspection robot
[J].DOI:10.3969/j.issn.1001-3997.2013.01.010
可自适应变曲率立面的分体柔性爬壁机器人设计与分析
[J].
Design and analysis of split-flexible wall-climbing robot with adaptive variable curvature facade
[J].DOI:10.3901/jme.2021.03.049 [本文引用: 1]
A wall-climbing robot with gecko features
[C]//
Strong magnetic units for a wind power tower inspection and maintenance robot
[J].
A gecko-inspired robot for wind power tower inspection
[J].
A wall climbing robot for oil tank inspection
[C]//
A magnetic crawler wall-climbing robot with capacity of high payload on the convex surface
[J].
新型爬壁机器人磁吸附单元优化设计
[J].
Optimization of a novel magnetic adsorption unit for wall-climbing robot
[J].
轮式悬磁吸附爬壁机器人研究
[D].
Research on wheeled suspended magnetic climbing wall robot
[D].
A wall climbing robot for tank inspection. an autonomous prototype
[C]//
基于Halbach阵列爬壁机器人永磁轮吸附单元的设计与优化
[J].
The optimization of a novel permanent-magnetic wheel adsorption unit for wall-climbing robot based on Halbach array
[J].DOI:10.3969/j.issn.1006-4303.2015.04.009 [本文引用: 1]
面向焊接任务的轮足式非接触磁吸附爬壁机器人研究
[D].
Research on wheel foot type non-contact magnetic adsorption wall climbing robot for welding task
[D].
基于Halbach阵列爬壁机器人磁吸附单元的优化设计
[J].
Optimized design of magnetic adsorption unit for wall-climbing robots based on halbach array
[J].DOI:10.3969/j.issn.1005-2895.2014.05.005 [本文引用: 1]
A magnetic climbing robot for steel bridge inspection
[C]//Proceeding of the 11th World Congress on Intelligent Control and Automation. Shenyang,

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}