爬壁机器人悬摆式磁吸附机构的设计与优化
Design and optimization of pendulous magnetic adsorption mechanism for wall-climbing robots
爬壁机器人悬摆式磁吸附机构的设计与优化 |
| 张栋,杨培,黄哲轩,孙凌宇,张明路 |
|
Design and optimization of pendulous magnetic adsorption mechanism for wall-climbing robots |
| Dong ZHANG,Pei YANG,Zhexuan HUANG,Lingyu SUN,Minglu ZHANG |
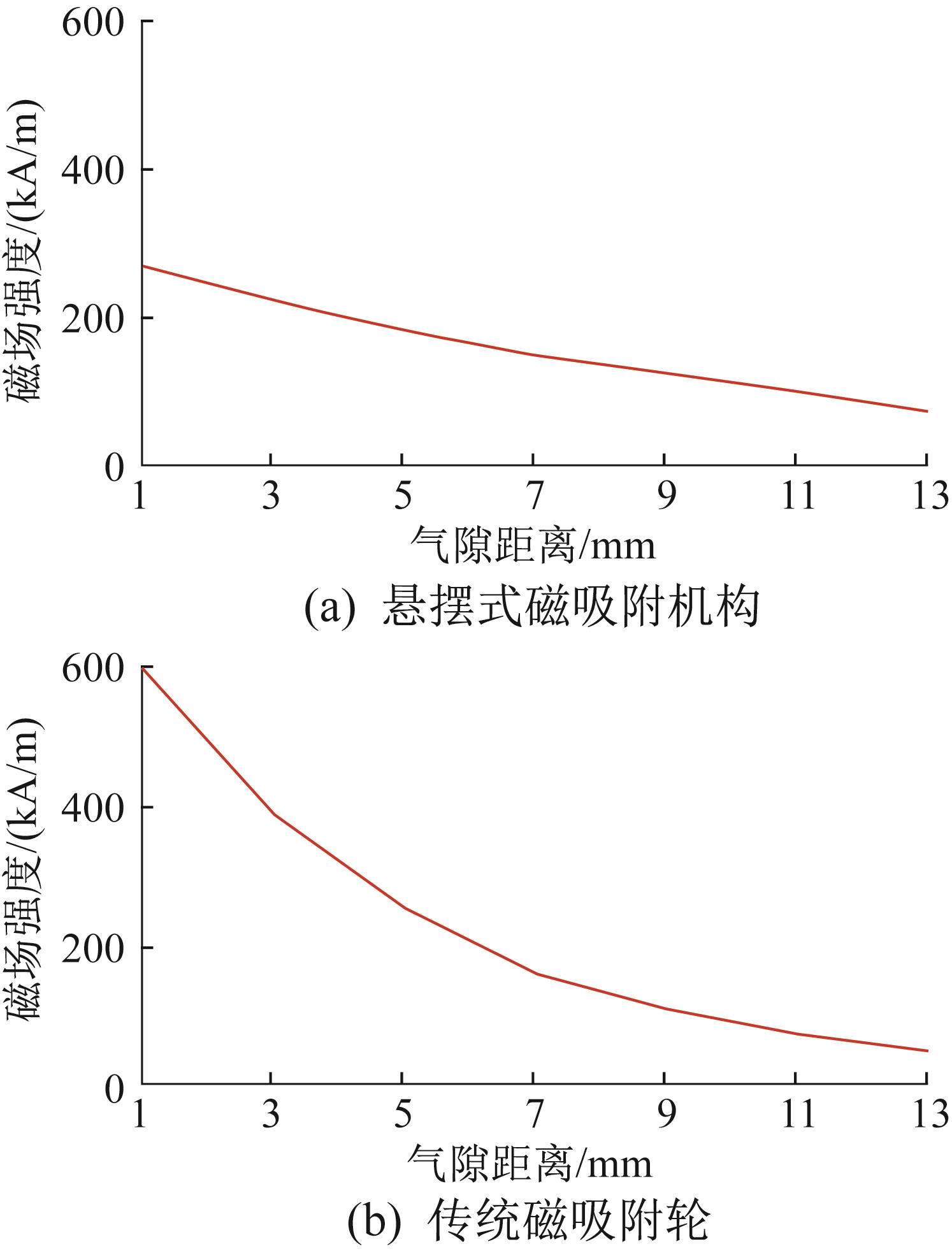
| 图8 磁吸附机构车轮径向磁场强度的变化 |
| Fig.8 Variation of magnetic field strength along the radial direction of wheel of magnetic adsorption mechanism |
|
|